
Application of a Bayesian Network Based on Multi-Source Information Fusion in the Fault Diagnosis of a Radar Receiver

Abstract
:1. Introduction
- A variety of monitoring sensors are designed in the receiver. Based on multi-source information fusion technology, the prior diagnosis database and the real-time monitoring database reflected by the sensor are analyzed and fused to achieve the diversification, quantification, and standardization of the data.
- A Bayesian network fault diagnosis model is proposed and applied to the fault diagnosis analysis of a radar receiver. The analysis results show that this method is effective.
- In contrast to traditional BITE technology, our method can realize accurate device-level fault location and fault cause analysis and avoid the replacement of whole components, reducing the maintenance costs of radars.
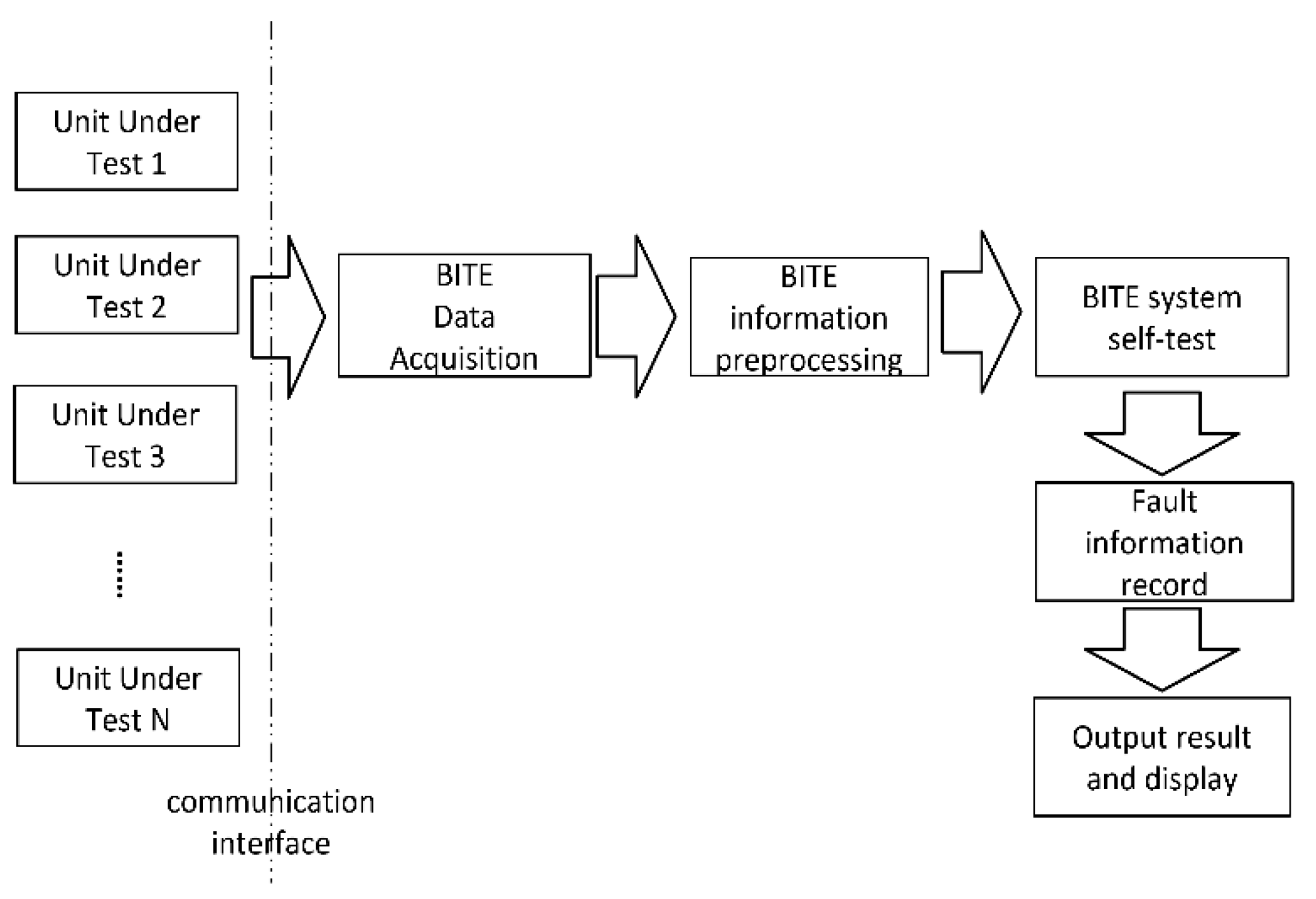
2. Fault Diagnosis System of Radar Receiver
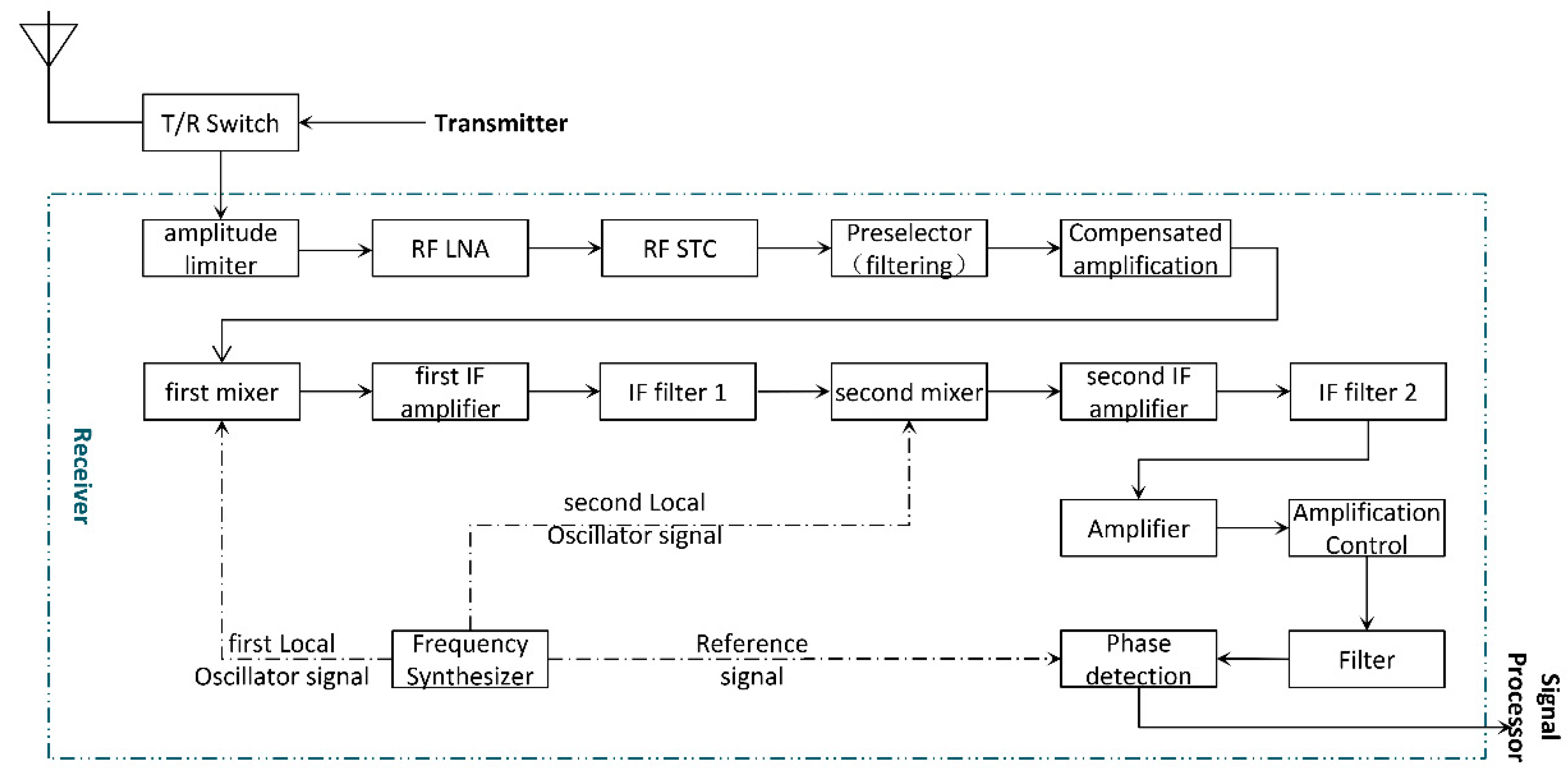
2.1. Radar Receiver
2.2. Multi-Source Information Fusion Technology
- Data Source
- 2.
- Information Fusion
- 3.
- Decision Discrimination
2.3. Bayesian Network
2.3.1. Brief Description
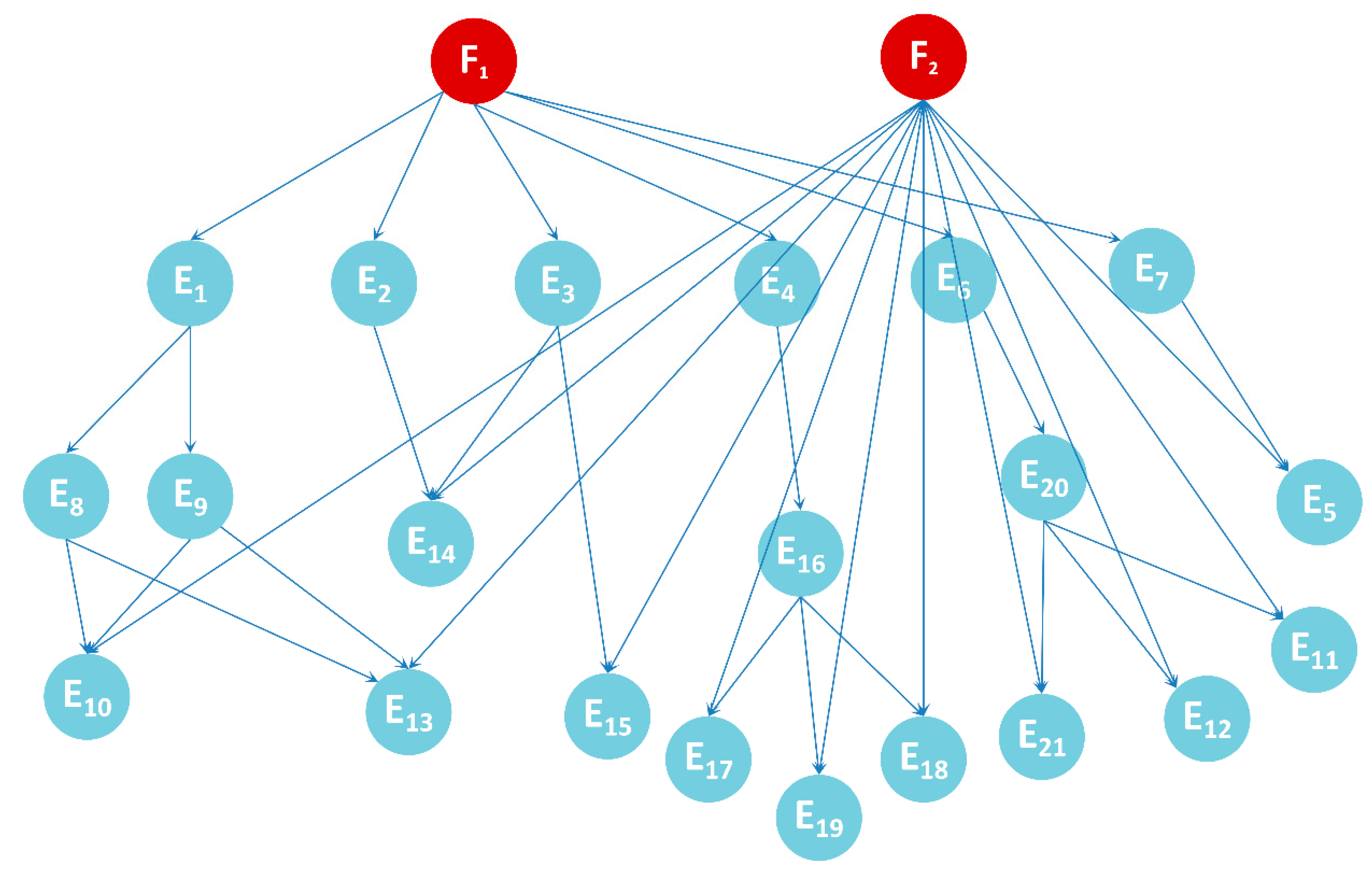
2.3.2. Determination of Bayesian Network
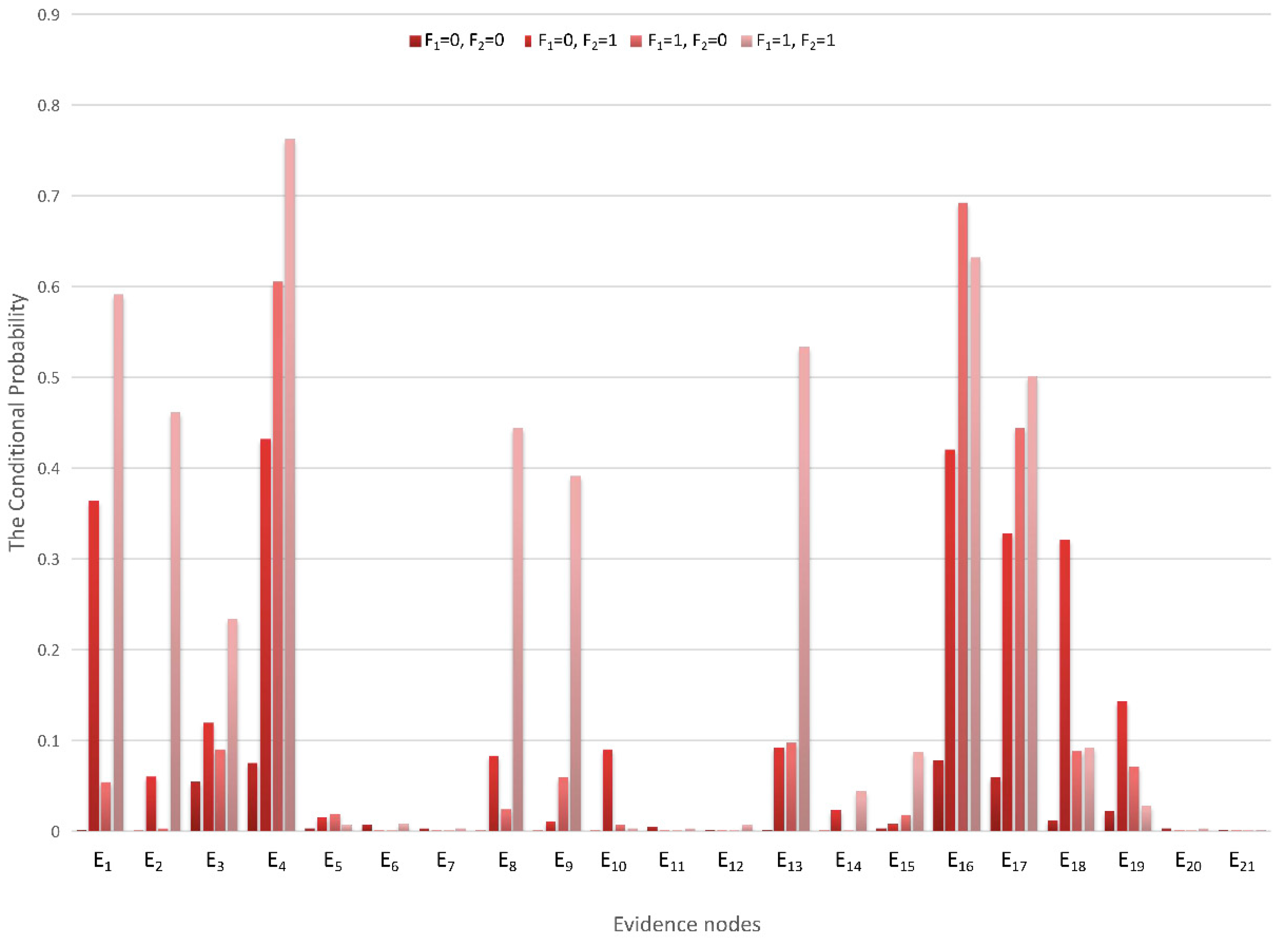
3. Results
4. Discussion
4.1. F1 and F2 Sub-Node Evidence
4.2. E4 Sub-Node Evidence
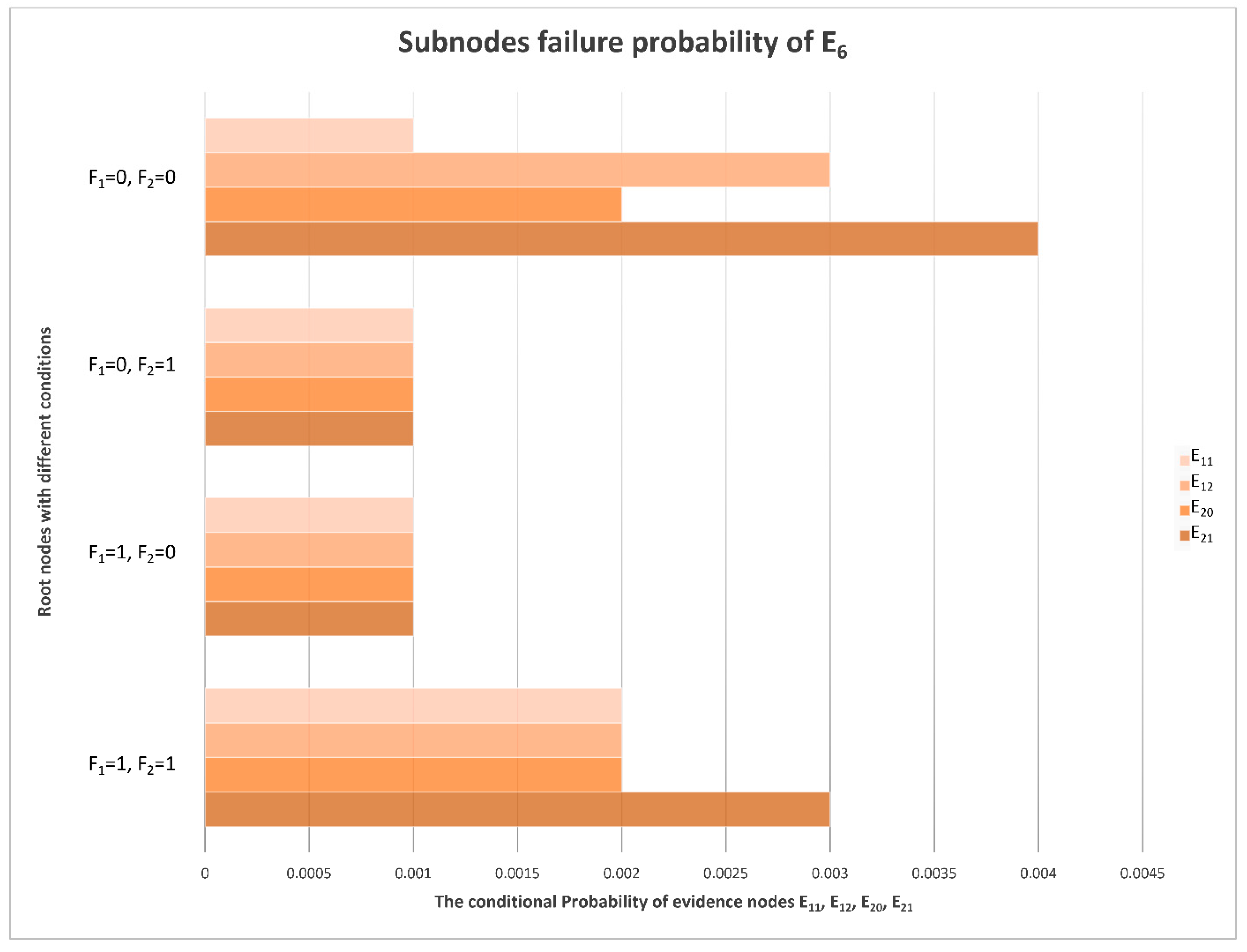
4.3. E6 and E7 Sub-Node Evidence
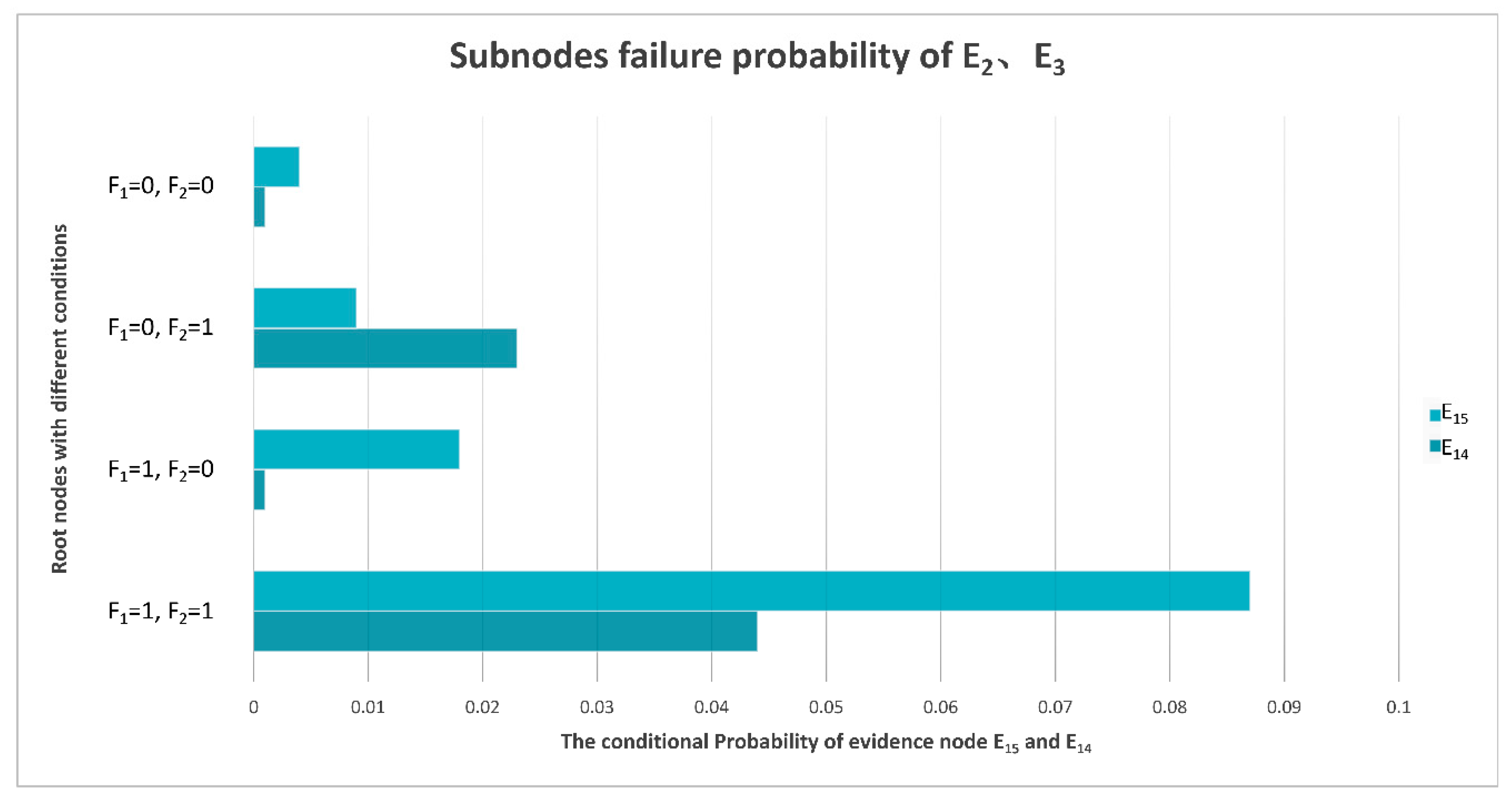
4.4. E2 and E3 Sub-Node Evidence
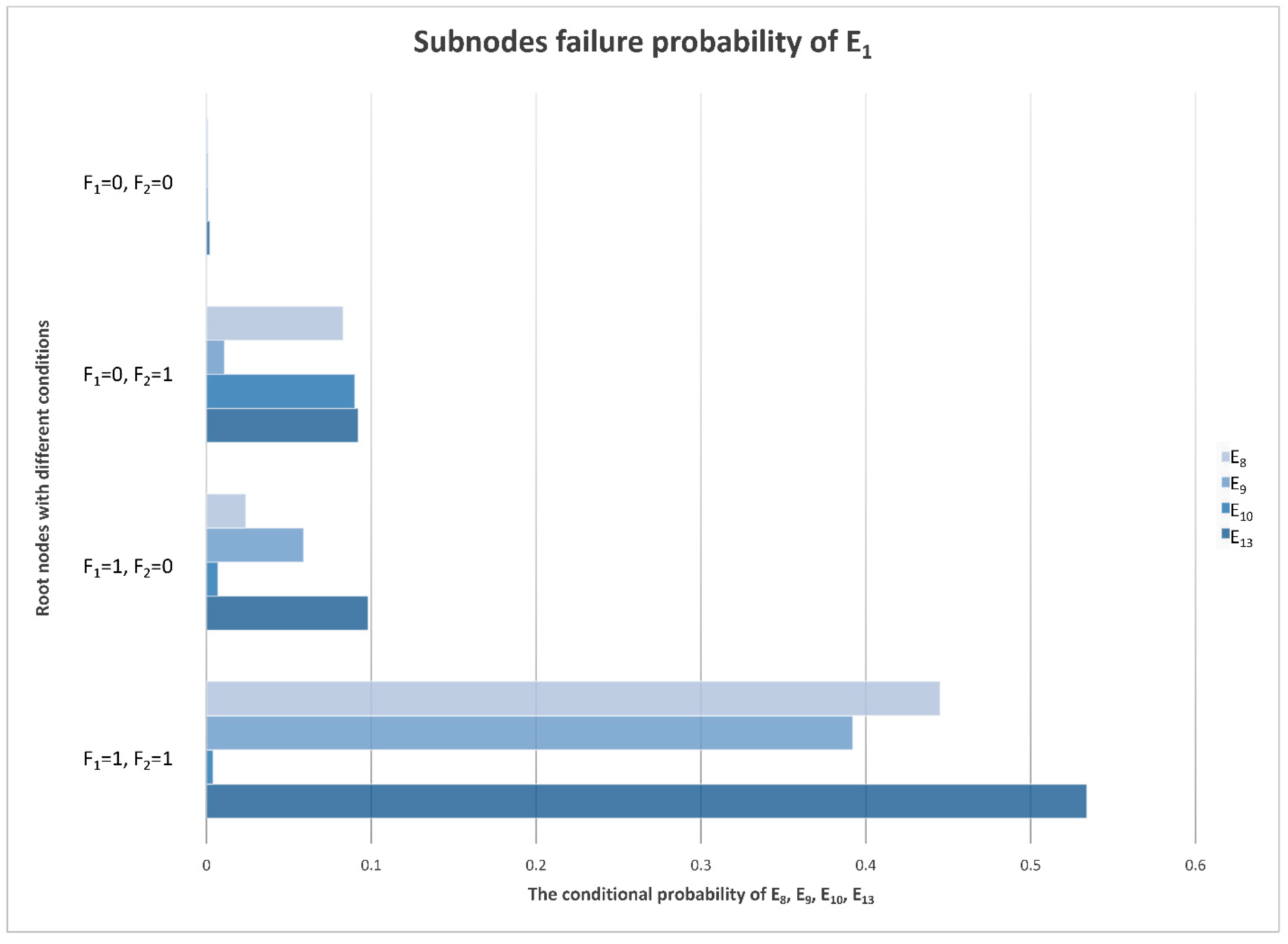
4.5. E1 Sub-Node Evidence
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, B. On the development of military radar and its role in modern war. Dual Use Technol. Prod. 2018, 190. [Google Scholar] [CrossRef]
- Chen, L.; Shen, X.; Tian, Q. SAR technique and its application to geologic and seismic research. Earthquake 2003, 23, 29–35. [Google Scholar] [CrossRef]
- Qiang, Q.; Deng, F. Research and Analysis of the Radar Receiver Noise Characteristic. Value Eng. 2012, 31, 187–188. [Google Scholar] [CrossRef]
- Zhu, Z. Analysis of Different Radar Receivers. Mod. Radar 2010, 32, 84–86. [Google Scholar] [CrossRef]
- Wang, P.; Lee, C.-M. Fault Diagnosis of a Helical Gearbox Based on an Adaptive Empirical Wavelet Transform in Combination with a Spectral Subtraction Method. Appl. Sci. 2019, 9, 1696. [Google Scholar] [CrossRef]
- Jayakumar, K.; Thangavel, S. Industrial drive fault diagnosis through vibration analysis using wavelet transform. J. Vib. Control JVC 2017, 23, 2003–2013. [Google Scholar] [CrossRef]
- Jha, R.K.; Swami, P.D. Fault diagnosis and severity analysis of rolling bearings using vibration image texture enhancement and multiclass support vector machines. Appl. Acoust. 2021, 182, 108243. [Google Scholar] [CrossRef]
- Fan, Q.; Yu, F.; Xuan, M. Transformer fault diagnosis method based on improved whale optimization algorithm to optimize support vector machine. Energy Rep. 2021, 7, 856–866. [Google Scholar] [CrossRef]
- Schmid, M.; Endisch, C. Online diagnosis of soft internal short circuits in series-connected battery packs using modified kernel principal component analysis. J. Energy Storage 2022, 53, 104815. [Google Scholar] [CrossRef]
- Han, Y.; Liu, J.; Liu, F.; Geng, Z. An intelligent moving window sparse principal component analysis-based case based reasoning for fault diagnosis: Case of the drilling process. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Naganathan, G.S.; Senthilkumar, M.; Aiswariya, S.; Muthulakshmi, S.; Santhiya Riyasen, G.; Mamtha Priyadharshini, M. Internal fault diagnosis of power transformer using artificial neural network. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Kumar, A.; Singh, A.P. Transistor level fault diagnosis in digital circuits using artificial neural network. Measurement 2016, 82, 384–390. [Google Scholar] [CrossRef]
- Shao, M.; Zhu, X.; Cao, H.; Shen, H. An artificial neural network ensemble method for fault diagnosis of proton exchange membrane fuel cell system. Energy 2014, 67, 268–275. [Google Scholar] [CrossRef]
- Elsisi, M.; Tran, M.; Mahmoud, K.; Mansour, D.A.; Lehtonen, M.; Darwish, M.M.F. Effective IoT-based deep learning platform for online fault diagnosis of power transformers against cyberattacks and data uncertainties. Measurement 2022, 190, 110686. [Google Scholar] [CrossRef]
- Wang, Z.; Xia, H.; Zhang, J.; Annor-Nyarko, M.; Zhu, S.; Jiang, Y.; Yin, W. A deep transfer learning method for system-level fault diagnosis of nuclear power plants under different power levels. Ann. Nucl. Energy 2022, 166, 108771. [Google Scholar] [CrossRef]
- Shahin, S.; Xiang, L.; Jay, L. Deep learning-based cross-sensor domain adaptation for fault diagnosis of electro-mechanical actuators. Int. J. Dyn. Control 2020, 8, 1054–1062. [Google Scholar] [CrossRef]
- Wen, C.; Lv, F.; Bao, Z.; Liu, M. A Review of Data Driven-based Incipient Fault Diagnosis. Acta Autom. Sin. 2016, 42, 1285–1299. [Google Scholar] [CrossRef]
- Ye, S. Analysis on BITE management technology of modern air traffic control radar. Manag. Obs. 2011, 6–7. [Google Scholar] [CrossRef]
- Yuan, H. The Modern Design Method about the Radar Mechanical Structure. Electro-Mech. Eng. 2000, 8–10. [Google Scholar] [CrossRef]
- Gabella, M. Variance of Fluctuating Radar Echoes from Thermal Noise and Randomly Distributed Scatterers. Atmosphere 2014, 5, 92–100. [Google Scholar] [CrossRef] [Green Version]
- Lai, Y.; Li, X. Reasoning strategies in uncertain situations for fault diagnosis of complex device. J. Electron. Meas. Instrum. 2011, 25, 117–123. [Google Scholar] [CrossRef]
- Zeng, J.; Teng, Z. Data processes method of single-sensor based on maximum entropy. J. Electron. Meas. Instrum. 2012, 26, 1096–1099. [Google Scholar] [CrossRef]
- Qian, M.; Yang, G.; Zhang, Y.; Jiang, C. Design of multi-channel VHF superheterodyne receiver. Mod. Electron. Tech. 2019, 42, 1–4, 10. [Google Scholar] [CrossRef]
- Tohidian, M.; Madadi, I.; Staszewski, R.B. A Fully Integrated Discrete-Time Superheterodyne Receiver. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2017, 25, 635–647. [Google Scholar] [CrossRef]
- Chen, X.; Zeng, X. Adaptive Processing of Phase Coded Waveform Echo. Radar Sci. Technol. 2012, 10, 99–102, 111. [Google Scholar] [CrossRef]
- Dong, Q.; Zhang, P. Design of Digital Synthetic Aperture Radar Receiver. Chin. J. Electron Devices 2008, 31, 572–575. [Google Scholar] [CrossRef]
- Chen, K.; Zhang, Z.; Long, J. Multisource Information Fusion: Key Issues, Research Progress and New Trends. Comput. Sci. 2013, 40, 6–13. [Google Scholar] [CrossRef]
- Juan, G.-R.; Serrano, M.A.; Patricio, M.A.; Jesús, G.; Molina, J.M. Context-based scene recognition from visual data in smart homes: An Information Fusion approach. Pers. Ubiquitous Comput. 2011, 16, 835–857. [Google Scholar] [CrossRef]
- Li, X.; Song, J.; Qu, B.; Tian, M.; Xu, C.; Song, X.; Cai, W. Fault diagnosis technology of hydraulic powered support based on multilevel data fusion technology. Coal Sci. Technol. 2016, 44, 154–159. [Google Scholar] [CrossRef]
- He, G.; Huo, H.; Fang, T. Scene classification based on feature-level and decision-level fusion. J. Comput. Appl. 2016, 36, 1262–1266. [Google Scholar] [CrossRef]
- Rachid, B. Robust human action recognition scheme based on high-level feature fusion. Multimed. Tools Appl. 2012, 69, 253–275. [Google Scholar] [CrossRef]
- Begum, S.; Barua, S.; Ahmed, M.U. Physiological Sensor Signals Classification for Healthcare Using Sensor Data Fusion and Case-Based Reasoning. Sensors 2014, 14, 11770. [Google Scholar] [CrossRef] [PubMed]
- Czwartacka, A.; Lukasik, W.; Cholewa, J.; Jakubovvski, M. A BITE subsystem for phased array transmit antenna control. In Proceedings of the 15th International Conference on Microwaves, Radar and Wireless Communications (MIKON-2004), Warsaw, Poland, 17–19 May 2004; pp. 915–918. [Google Scholar]
- Qian, L.; Liu, R. Application of BP Network to Fault Diagnosis of Radar Frequency Source. J. Air Force Radar Acad. 2008, 22, 117–119, 124. [Google Scholar] [CrossRef]
- Biao, W.; Kelei, F.; Wenzhong, Y.; Zhiyu, Z. Study on multiple targets tracking algorithm based on multiple sensors. Clust. Comput. 2018, 22, 13283–13291. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y.; Jia, J. Ship Perception Information Fusion of Electronic Chart and Radar Image Based on Deep Learning Theory. Mod. Radar 2021, 43, 44–50. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, P. Applying Method of Multi-Source Information Fusion to Achieving Early Diagnosis of Aero-Engine Rotor Fault. J. Northwestern Polytech. Univ. 2009, 27, 326–329. [Google Scholar] [CrossRef]
- Arjun, S.; Brian, S.; Jeremy, S.; Olivier, H.; Margaret, M. Bayesian additional evidence for decision making under small sample uncertainty. BMC Med. Res. Methodol. 2021, 21, 221. [Google Scholar] [CrossRef]
- Medkour, M.; Khochmane, L.; Bouzaouit, A.; Bennis, O. Transformation of Fault Trees into Bayesian Networks Methodology for Fault Diagnosis. Mechanika 2017, 23, 891–899. [Google Scholar] [CrossRef]
- Lijia, X.; Zhiliang, K. Study on Fault Diagnosis for Radar′s Transmitter Based on Bayesian Network. In Proceedings of the 2010 2nd International Conference on Information Science and Engineering, Hangzhou, China, 4–6 December 2010; pp. 1530–1533. [Google Scholar]
- Diskus, C.G.; Stelzer, A.; Gamsjäger, C.; Fischer, A.; Lübke, K.; Kolmhofer, E. Six-Port Receiver and Frequency Measurement for Radar Applications at 35GHz. Subsurf. Sens. Technol. Appl. 2000, 1, 271–288. [Google Scholar] [CrossRef]
- Hou, J. Discussion on Radar Equation. Mod. Def. Technol. 2020, 48, 1–4, 38. [Google Scholar]
- Gustafsson, A.; Alfredsson, M.; Danestig, M.; Malmqvist, R.; Ouacha, A. A fully integrated radar receiver front end including an active tunable band pass filter and an image rejection mixer. In Proceedings of the Microwave Conference, 2000 Asia-Pacific, Sydney, NSW, Australia, 3–6 December 2000; pp. 99–102. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nodes | Node Description | Monitoring Parameters |
|---|---|---|
| F1 | Output IF signal is abnormal | Fault indicator of Receiver |
| F2 | Power converter failure | Voltage |
| Nodes | Node Description | Monitoring Parameters |
|---|---|---|
| E1 | Abnormal signal frequency | Frequency of Echo signal |
| E2 | Inconsistent signal phase | Phase of signal Voltage |
| E3 | Inconsistent signal amplitude | Amplitude of signal |
| E4 | Low signal power | Power of signal |
| E5 | RF STC failure | Amplitude of signal |
| E6 | More clutter | Spectrum of signal |
| E7 | Ineffective STC modulation | Amplitude of signal |
| E8 | 1st mixer inoperative | Frequency of signal |
| E9 | 2nd mixer inoperative | Frequency of signal |
| E10 | Frequency synthesizer failure | No signal |
| E11 | 2nd IF filter failure | Spectrum of signal |
| E12 | 1st IF filter failure | Spectrum of signal |
| E13 | Mixer failure | Voltage |
| E14 | Amplitude and phase corrector failure | Amplitude and phase of signal |
| E15 | Amplitude limiter failure | Amplitude of signal |
| E16 | Power amplifier under power | Power of signal |
| E17 | RF LNA failure | Power of signal |
| E18 | 2nd IF amplifier failure | Power of signal |
| E19 | 1st IF amplifier failure | Power of signal |
| E20 | Insufficient filtering | Spectrum of signal |
| E21 | Preselector failure | Spectrum of signal |
| Nodes | State (True/False) | P(Fx) |
|---|---|---|
| F1 | 1 | P(F1) = 0.074 |
| 0 | P(F1) = 0.926 | |
| F2 | 1 | P(F2) = 0.219 |
| 0 | P(F2) = 0.781 |
| Nodes | F1 | F2 | E1 | E2 | E3 | E4 | E5 | E6 | E7 |
|---|---|---|---|---|---|---|---|---|---|
| Probability | 0 | 0 | 0.002 | 0.001 | 0.055 | 0.075 | 0.004 | 0.007 | 0.003 |
| 0 | 1 | 0.364 | 0.060 | 0.120 | 0.432 | 0.015 | 0.001 | 0.001 | |
| 1 | 0 | 0.054 | 0.003 | 0.090 | 0.606 | 0.019 | 0.001 | 0.001 | |
| 1 | 1 | 0.592 | 0.462 | 0.234 | 0.763 | 0.007 | 0.008 | 0.004 | |
| Nodes | F1 | F2 | E8 | E9 | E10 | E11 | E12 | E13 | E14 |
| Probability | 0 | 0 | 0.001 | 0.001 | 0.001 | 0.005 | 0.002 | 0.002 | 0.001 |
| 0 | 1 | 0.083 | 0.211 | 0.090 | 0.001 | 0.001 | 0.092 | 0.023 | |
| 1 | 0 | 0.024 | 0.059 | 0.007 | 0.001 | 0.001 | 0.098 | 0.001 | |
| 1 | 1 | 0.445 | 0.392 | 0.004 | 0.003 | 0.007 | 0.534 | 0.044 | |
| Nodes | F1 | F2 | E15 | E16 | E17 | E18 | E19 | E20 | E21 |
| Probability | 0 | 0 | 0.004 | 0.078 | 0.059 | 0.012 | 0.022 | 0.004 | 0.002 |
| 0 | 1 | 0.009 | 0.421 | 0.328 | 0.322 | 0.143 | 0.001 | 0.001 | |
| 1 | 0 | 0.018 | 0.693 | 0.445 | 0.088 | 0.071 | 0.001 | 0.001 | |
| 1 | 1 | 0.087 | 0.632 | 0.501 | 0.092 | 0.028 | 0.003 | 0.002 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Bi, X.; Gu, L.; Wei, J.; Liu, B. Application of a Bayesian Network Based on Multi-Source Information Fusion in the Fault Diagnosis of a Radar Receiver. Sensors 2022, 22, 6396. https://doi.org/10.3390/s22176396
Liu B, Bi X, Gu L, Wei J, Liu B. Application of a Bayesian Network Based on Multi-Source Information Fusion in the Fault Diagnosis of a Radar Receiver. Sensors. 2022; 22(17):6396. https://doi.org/10.3390/s22176396
Chicago/Turabian StyleLiu, Boya, Xiaowen Bi, Lijuan Gu, Jie Wei, and Baozhong Liu. 2022. "Application of a Bayesian Network Based on Multi-Source Information Fusion in the Fault Diagnosis of a Radar Receiver" Sensors 22, no. 17: 6396. https://doi.org/10.3390/s22176396
APA StyleLiu, B., Bi, X., Gu, L., Wei, J., & Liu, B. (2022). Application of a Bayesian Network Based on Multi-Source Information Fusion in the Fault Diagnosis of a Radar Receiver. Sensors, 22(17), 6396. https://doi.org/10.3390/s22176396