
Vibration Analysis of a 1-DOF System Coupled with a Nonlinear Energy Sink with a Fractional Order Inerter


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
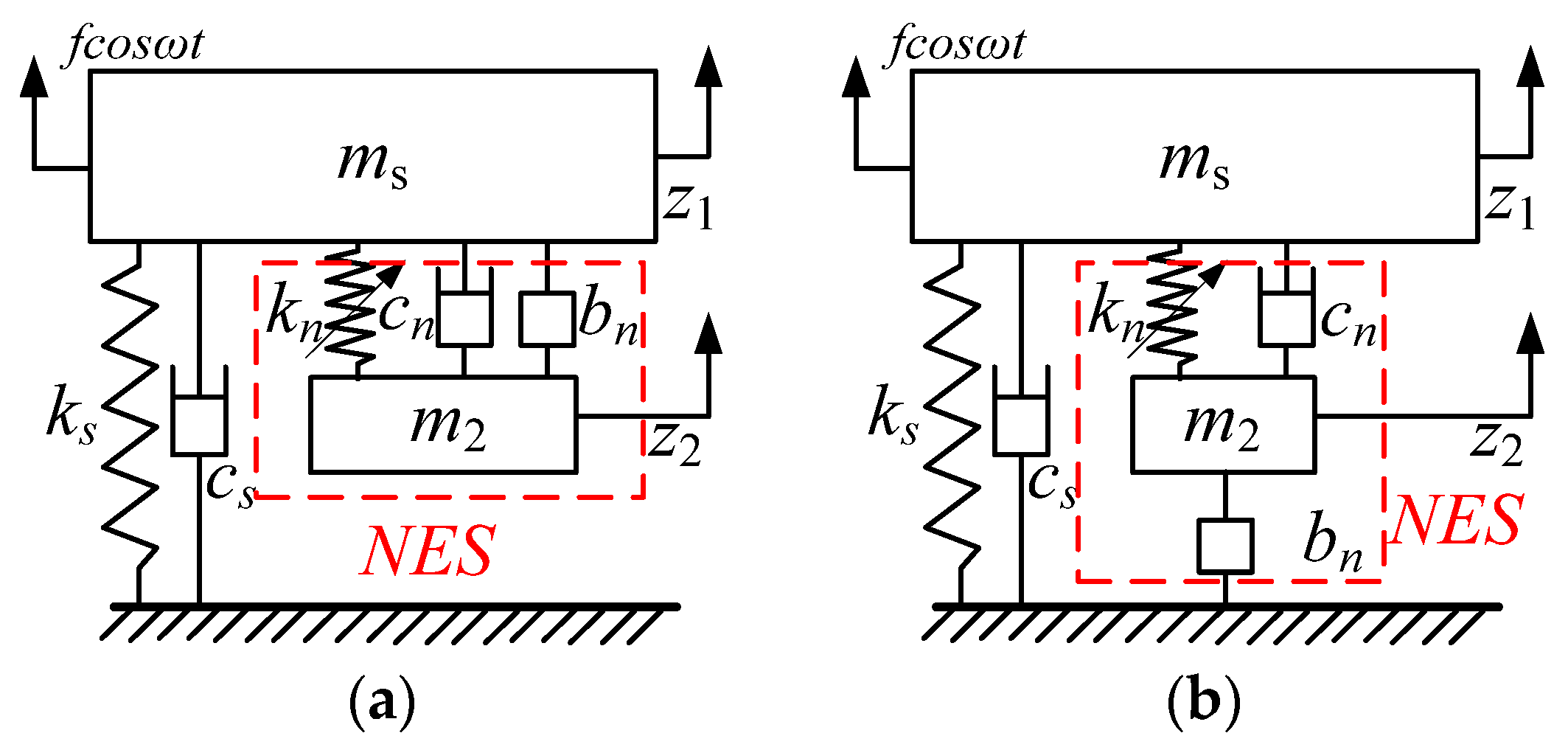
2. Dynamic Model of a Linear SDOF System Coupled with Fractional-Order NES
3. Equilibrium Point Analysis
3.1. The SVDE of the System Coupled with Fractional-Order NES (S.1)
3.2. The Discriminant Derivation of the Number of Equilibrium Points of S.1
3.3. The Discriminant Derivation of the Number of Equilibrium Points of S.2
3.4. Stability Analysis Based on Lyapunov Theory
4. Numerical Simulation and Discussion
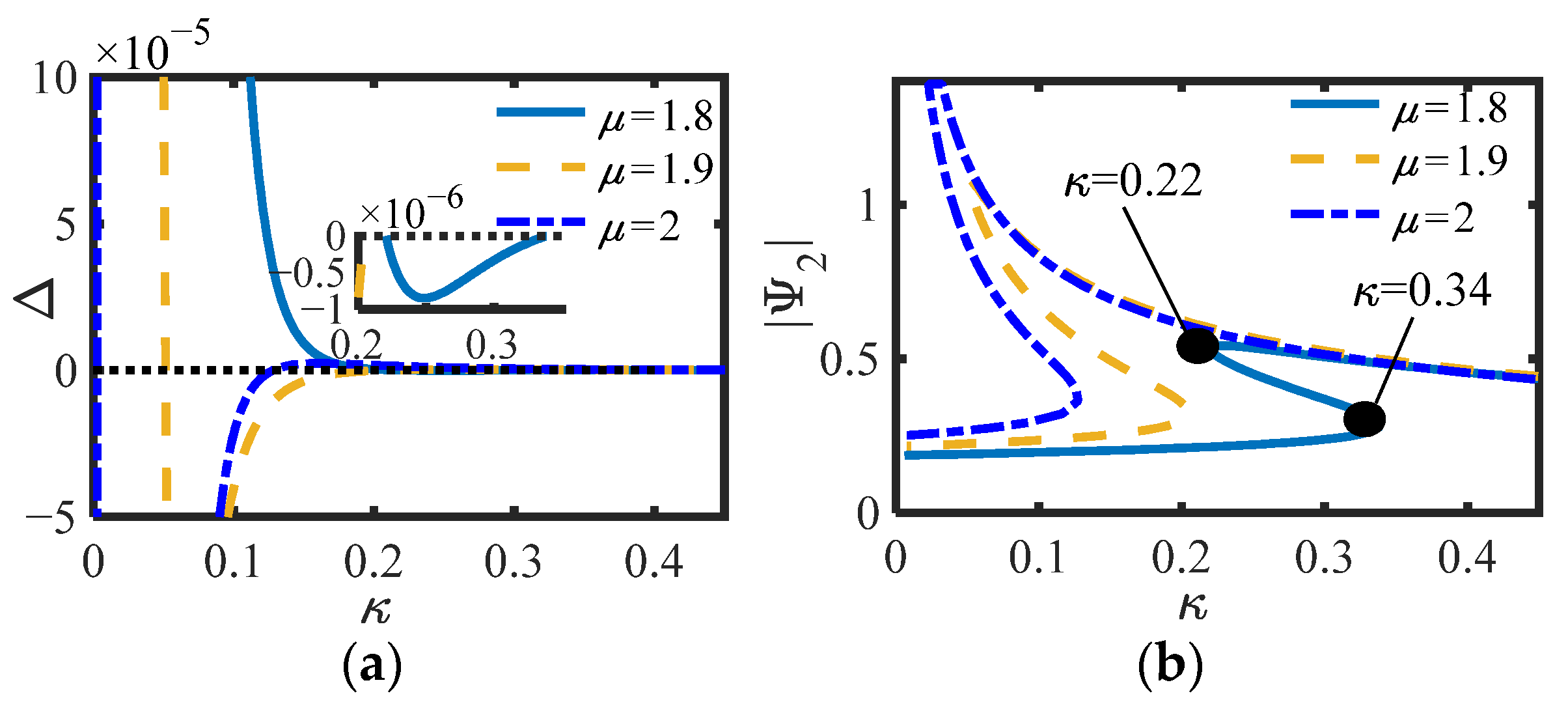
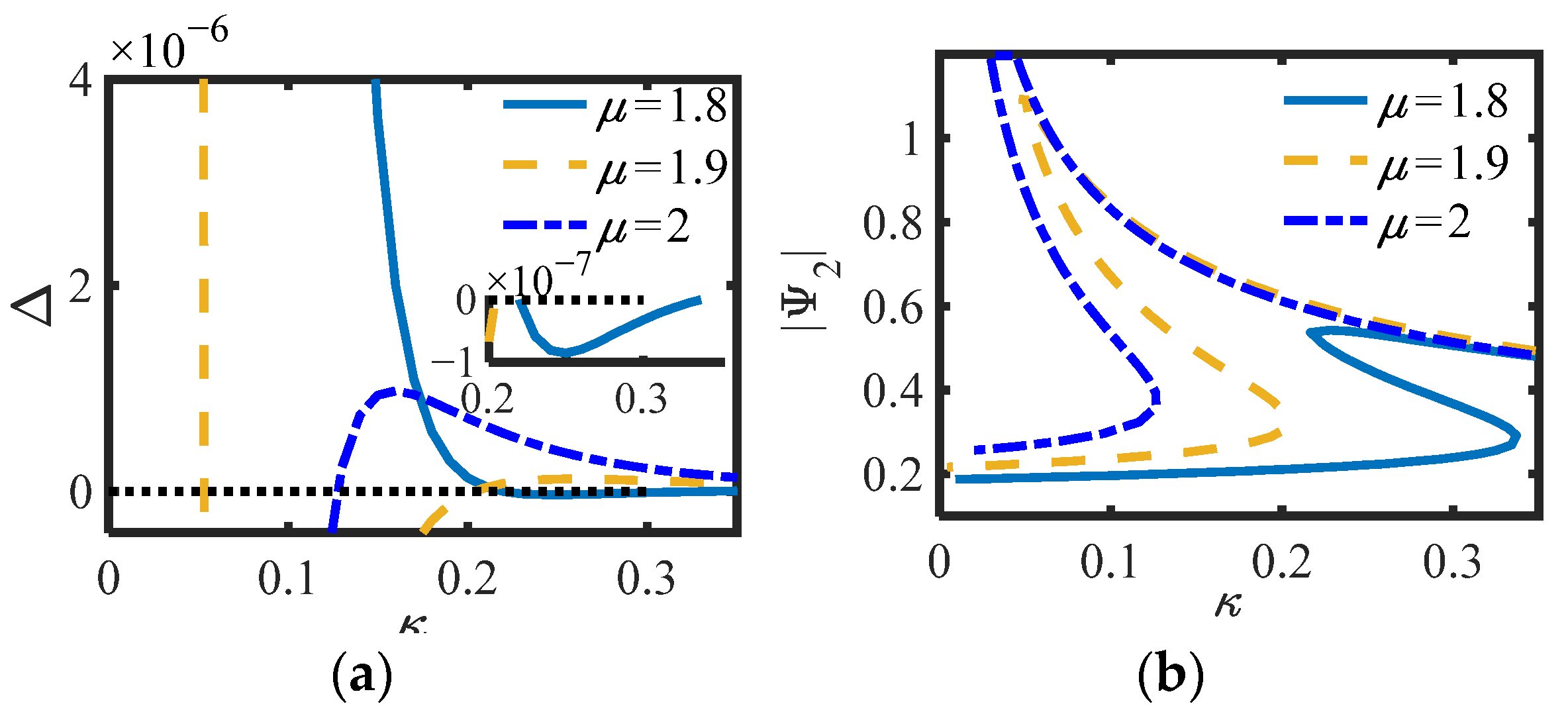
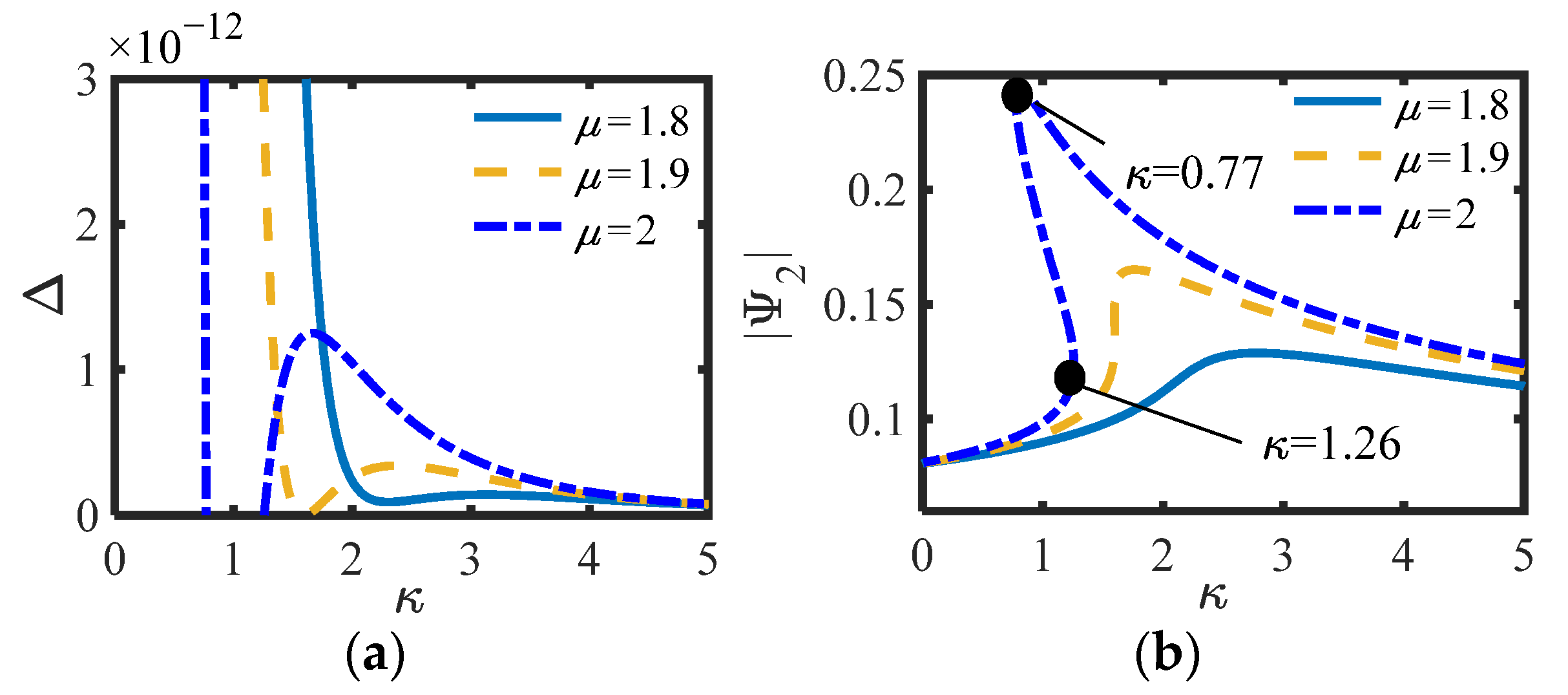
4.1. Influence of Parameters on the Number of Equilibrium Point
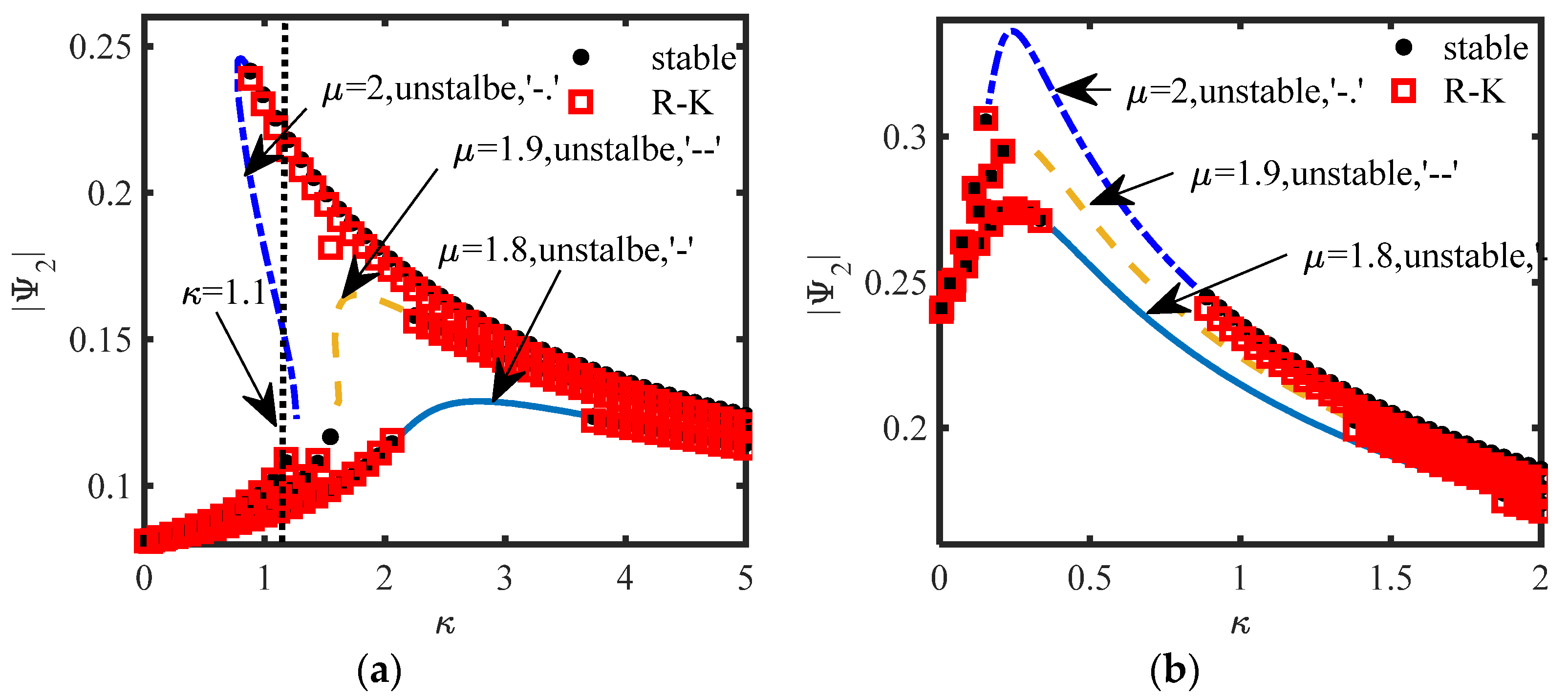
4.2. Verification of Equilibrium Point Discriminant
4.3. Stability Discrimination of Equilibrium Points
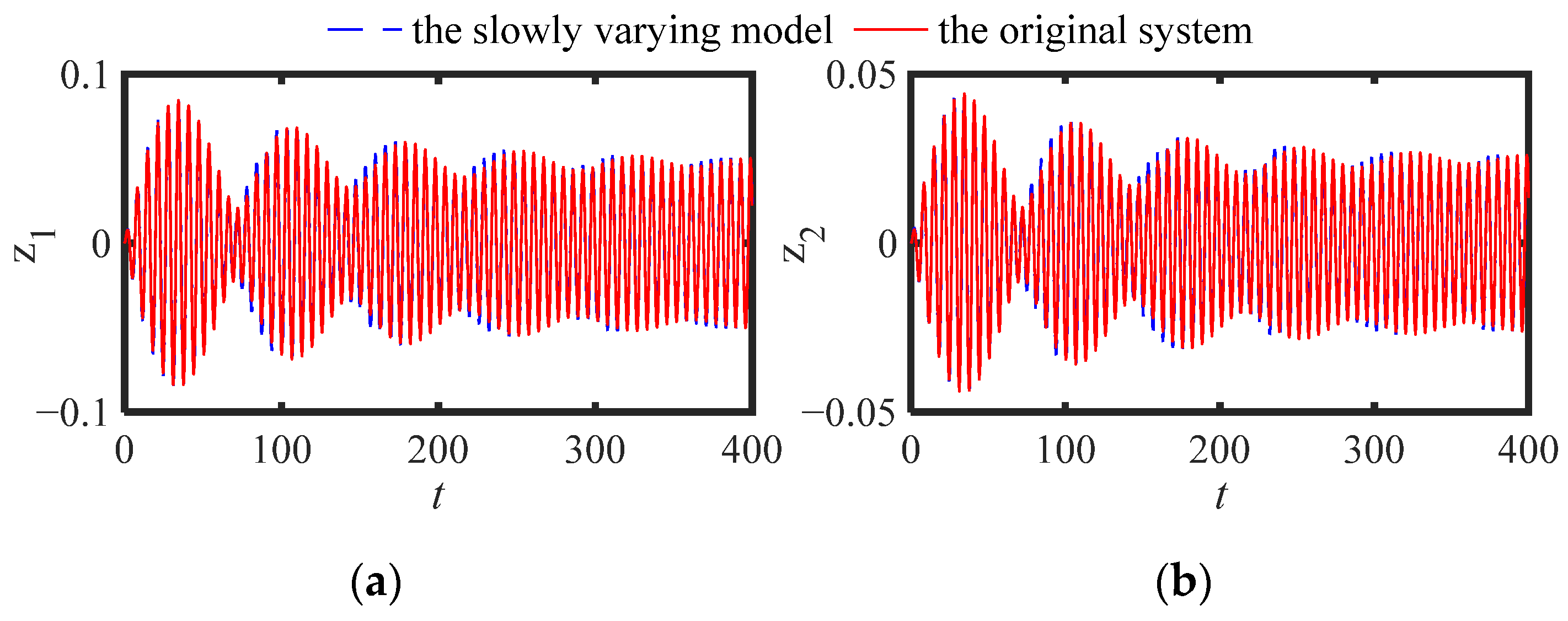
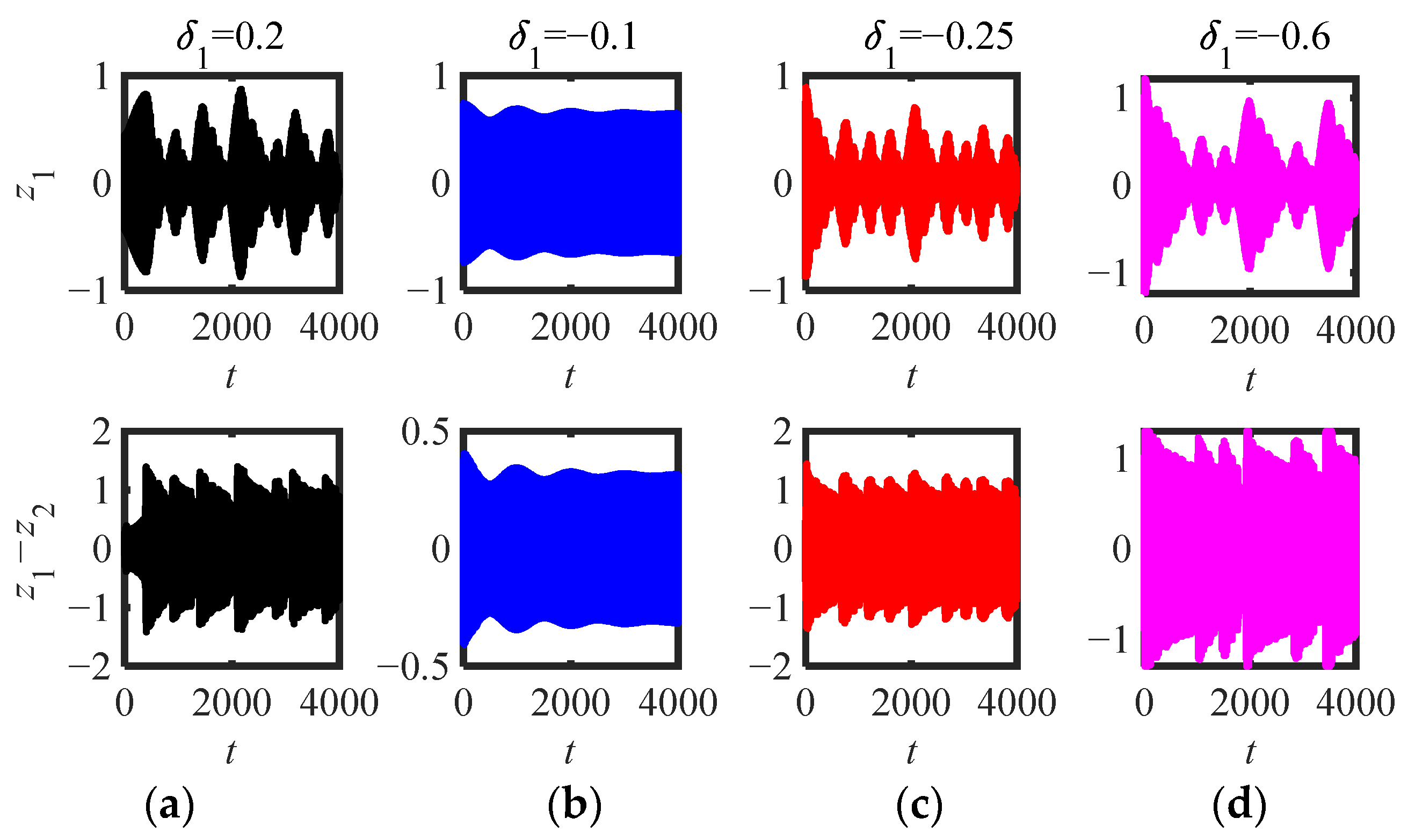
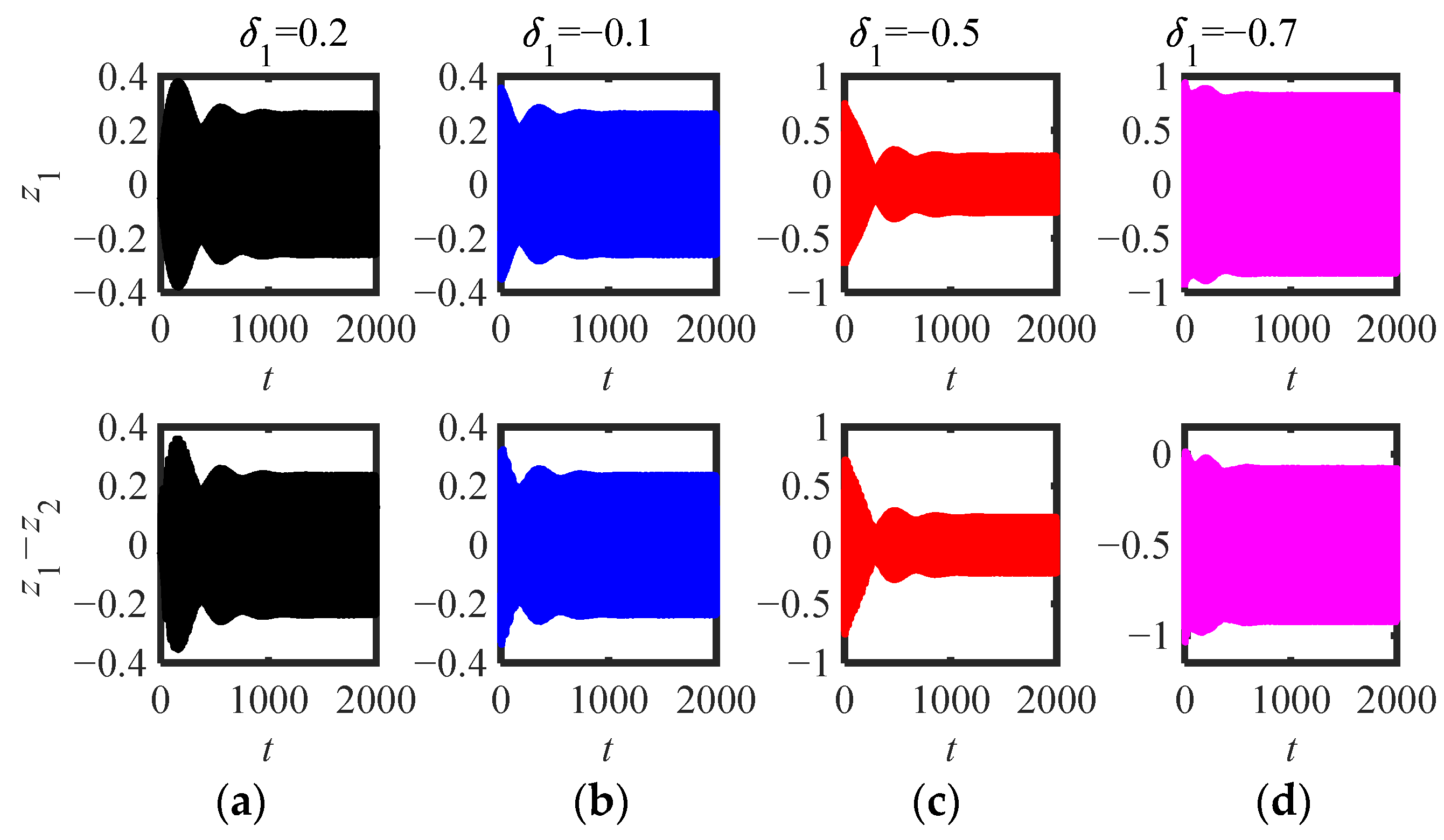
4.4. The Time-Domain Response
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Swift, S.J.; Smith, M.C.; Glover, A.R.; Papageorgiou, C.; Gartner, B.; Houghton, N.E. Design and modelling of a fluid inerter. Int. J. Control 2013, 86, 2035–2051. [Google Scholar] [CrossRef]
- Pei, D.J.W.J.-S. Modeling a helical fluid inerter system with time-invariantmem-models. Struct. Control Health Monit. 2020, 27, e2579. [Google Scholar] [CrossRef]
- Shen, Y.J.; Shi, D.H.; Chen, L.; Liu, Y.L.; Yang, X.F. Modeling and experimental tests of hydraulic electric inerter. Sci. China Technol. Sci. 2019, 62, 2161–2169. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G.; Zhang, R.F. Optimal design and seismic performance of tuned fluid inerter applied to structures with friction pendulum isolators. Soil Dyn. Earthq. Eng. 2020, 132, 106099. [Google Scholar] [CrossRef]
- De Domenico, D.; Deastra, P.; Ricciardi, G.; Sims, N.D.; Wagg, D.J. Novel fluid inerter based tuned mass dampers for optimised structural control of base-isolated buildings. J. Franklin I. 2019, 356, 7626–7649. [Google Scholar] [CrossRef]
- Zhao, Z.P.; Chen, Q.J.; Zhang, R.F.; Pan, C.; Jiang, Y.Y. Energy dissipation mechanism of inerter systems. Int. J. Mech. Sci. 2020, 184, 105845. [Google Scholar] [CrossRef]
- Xu, K.; Bi, K.M.; Ge, Y.J.; Zhao, L.; Han, Q.; Du, X.L. Performance evaluation of inerter-based dampers for vortex-induced vibration control of long-span bridges: A comparative study. Struct. Control Health 2020, 27, e2529. [Google Scholar] [CrossRef]
- Shen, Y.J.; Jiang, J.Z.; Neild, S.A.; Chen, L. Vehicle vibration suppression using an inerter-based mechatronic device. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 095440702090924. [Google Scholar] [CrossRef]
- Deastra, P.; Wagg, D.J.; Sims, N.D. The Realisation of an Inerter-Based System Using Fluid Inerter. Dyn. Civ. Struct. 2019, 2, 127–134. [Google Scholar] [CrossRef]
- Shen, Y.J.; Chen, L.; Liu, Y.L.; Zhang, X.L.; Yang, X.F. Optimized modeling and experiment test of a fluid inerter. J. Vibroeng. 2016, 18, 2789–2800. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.J.; Chen, L.; Liu, Y.L.; Zhang, X.L. Influence of fluid inerter nonlinearities on vehicle suspension performance. Adv. Mech. Eng. 2017, 9, 168781401773725. [Google Scholar] [CrossRef]
- Chen, W. Fractional Derivative Modeling of Mechanical and Engineering Problems; Science Press: Beijing, China, 2010. [Google Scholar]
- Westerlund, S. Report No. 940426; University of Kalmar: Kalmar, Sweden, 1994. [Google Scholar]
- Chen, Y.; Xu, J.; Tai, Y.; Xu, X.; Chen, N. Critical damping design method of vibration isolation system with both fractional-order inerter and damper. Mech. Adv. Mater. Struct. 2022, 29, 1348–1359. [Google Scholar] [CrossRef]
- Mu’lla, M.A.M. Fractional Calculus, Fractional Differential Equations and Applications. OALib 2020, 7, 1–9. [Google Scholar] [CrossRef]
- AL-Shudeifat, M.A.; Saeed, A.S. Comparison of a modified vibro-impact nonlinear energy sink with other kinds of NESs. Meccanica 2021, 56, 735–752. [Google Scholar] [CrossRef]
- Ding, H.; Chen, L.Q. Designs, analysis, and applications of nonlinear energy sinks. Nonlinear Dynam. 2020, 100, 3061–3107. [Google Scholar] [CrossRef]
- Li, X.; Zhang, Y.W.; Ding, H.; Chen, L.Q. Dynamics and evaluation of a nonlinear energy sink integrated by a piezoelectric energy harvester under a harmonic excitation. J. Vib. Control 2019, 25, 851–867. [Google Scholar] [CrossRef]
- Chen, J.E.; Zhang, W.; Yao, M.H.; Liu, J. Vibration suppression for truss core sandwich beam based on principle of nonlinear targeted energy transfer. Compos. Struct. 2017, 171, 419–428. [Google Scholar] [CrossRef]
- Phan, T.N.; Bader, S.; Oelmann, B. Performance of An Electromagnetic Energy Harvester with Linear and Nonlinear Springs under Real Vibrations. Sensors 2020, 20, 5456. [Google Scholar] [CrossRef]
- Lamarque, C.H.; Thouverez, F.; Rozier, B.; Dimitrijevic, Z. Targeted energy transfer in a 2-DOF mechanical system coupled to a non-linear energy sink with varying stiffness. J. Vib. Control 2017, 23, 2567–2577. [Google Scholar] [CrossRef]
- Li, T.; Seguy, S.; Berlioz, A. Optimization mechanism of targeted energy transfer with vibro-impact energy sink under periodic and transient excitation. Nonlinear Dynam. 2017, 87, 2415–2433. [Google Scholar] [CrossRef] [Green Version]
- Li, H.Q.; Li, A.; Zhang, Y.F. Importance of gravity and friction on the targeted energy transfer of vibro-impact nonlinear energy sink. Int. J. Impact Eng. 2021, 157, 104001. [Google Scholar] [CrossRef]
- Shao, J.W.; Luo, Q.M.; Deng, G.M.; Zeng, T.; Yang, J.; Wu, X.; Jin, C. Experimental study on influence of wall acoustic materials of 3D cavity for targeted energy transfer of a nonlinear membrane absorber. Appl. Acoust. 2021, 184, 108342. [Google Scholar] [CrossRef]
- Manevitch, L.I.; Musienko, A.I.; Lamarque, C.H. New analytical approach to energy pumping problem in strongly nonhomogeneous 2dof systems. Meccanica 2007, 42, 77–83. [Google Scholar] [CrossRef]
- Gendelman, O.V.; Starosvetsky, Y.; Feldman, M. Attractors of harmonically forced linear oscillator with attached nonlinear energy sink I: Description of response regimes. Nonlinear Dynam. 2008, 51, 31–46. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Z.Q.; Ding, H.; Chen, L.Q. An inertial nonlinear energy sink. J. Sound Vib. 2019, 450, 199–213. [Google Scholar] [CrossRef]
- Zhang, Y.W.; Lu, Y.N.; Zhang, W.; Teng, Y.Y.; Yang, H.X.; Yang, T.Z.; Chen, L.Q. Nonlinear energy sink with inerter. Mech. Syst. Signal Pr. 2019, 125, 52–64. [Google Scholar] [CrossRef]
- Wang, J.J.; Wang, B.; Zhang, C.; Liu, Z.B. Effectiveness and robustness of an asymmetric nonlinear energy sink-inerter for dynamic response mitigation. Earthq. Eng. Struct. D 2021, 50, 1628–1650. [Google Scholar] [CrossRef]
- Javidialesaadi, A.; Wierschem, N.E. An inerter-enhanced nonlinear energy sink. Mech. Syst. Signal Pr. 2019, 129, 449–454. [Google Scholar] [CrossRef]
- Podlubný, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Shen, Y.J.; Yang, S.P.; Xing, H.J.; Ma, H.X. Primary resonance of Duffing oscillator with two kinds of fractional-order derivatives. Int. J. Nonlin Mech. 2012, 47, 975–983. [Google Scholar] [CrossRef]
- Xue, D.Y.; Zhao, C.N.; Chen, Y.Q. A modified approximation method of fractional order system. In Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation, Luoyang, China, 25–28 June 2006; Volume 1–3, pp. 1043–1048. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Tai, Y.; Xu, J.; Xu, X.; Chen, N. Vibration Analysis of a 1-DOF System Coupled with a Nonlinear Energy Sink with a Fractional Order Inerter. Sensors 2022, 22, 6408. https://doi.org/10.3390/s22176408
Chen Y, Tai Y, Xu J, Xu X, Chen N. Vibration Analysis of a 1-DOF System Coupled with a Nonlinear Energy Sink with a Fractional Order Inerter. Sensors. 2022; 22(17):6408. https://doi.org/10.3390/s22176408
Chicago/Turabian StyleChen, Yandong, Yongpeng Tai, Jun Xu, Xiaomei Xu, and Ning Chen. 2022. "Vibration Analysis of a 1-DOF System Coupled with a Nonlinear Energy Sink with a Fractional Order Inerter" Sensors 22, no. 17: 6408. https://doi.org/10.3390/s22176408
APA StyleChen, Y., Tai, Y., Xu, J., Xu, X., & Chen, N. (2022). Vibration Analysis of a 1-DOF System Coupled with a Nonlinear Energy Sink with a Fractional Order Inerter. Sensors, 22(17), 6408. https://doi.org/10.3390/s22176408