In this section, a simplified model of the aero-optical stabilization platform is firstly designed to illustrate the influence of mechanical resonance on the output torque of the actuator, which leads to the instability of the control system of the aero-optical platform. Secondly, the influence of mechanical resonance on the disturbance observer algorithm in the servo control system is explained; finally, on the basis of the disturbance observer algorithm, the state equalizer speed closed-loop loop is added to the control system, and the transfer function of the new closed-loop control system is analyzed. It can effectively eliminate the influence of mechanical resonance on the bandwidth of the aviation optoelectronic platform controller.
2.1. Mechanical Resonance Analysis of Servo System of Aviation Photoelectric Stabilization Platform
The servo system of the aviation photoelectric stabilization platform includes three loops, which are: the position loop, speed loop and current loop from outside to inside. The position loop is mainly used to track the target, and the position here refers to the relative position between the camera and the carrier, not the inertial space position. The stability of the Los is mainly realized by the speed loop. The speed loop itself has the function of keeping the Los stable in the inertial space, and most of the anti-disturbance algorithms also use the speed loop to play a role. This is used to precisely reproduce or follow a process. The design of the current loop is mainly aimed at the influence of the motor back electromotive force on the control current. Since it does not involve motion control, it will not be affected by mechanical resonance. Therefore, its control bandwidth can be very high.
The actual aviation optoelectronic stabilization platform system generally includes two frames, azimuth and pitch, and each frame and the motor are elastically connected.
Figure 2 shows the elastic position distribution of the aviation photoelectric stabilization platform. There are elastic deformations between the shaft system, such as the transmission shaft and the connecting shaft and the frame. As a result, there is a resonance point in the system, and mechanical resonance is induced, which in turn affects the further improvement of the bandwidth of the velocity loop, resulting in a decrease in the stability of the Los of the platform. For the purpose of research, the servo control system of the aviation photoelectric stabilization platform can be represented by a simplified system as shown in
Figure 3. Taking the azimuth axis of the aviation photoelectric stabilization platform as an example, the azimuth frame is composed of two parts: the moment of inertia of the turntable base and the moment of inertia of the load. It corresponds to the simplified system in
Figure 3, where
is the moment of inertia of the motor and
is the moment of inertia of the motor load. The elastic impedance of an elastic material consists of the viscous damper coefficient b and the stiffness coefficient
K.
is a measuring device, such as a gyro,
is an amplifier, and
is the torque constant of the motor. In the aviation optoelectronic stabilization platform system, the elastic impedance is the key factor affecting the resonance response characteristics and the anti-resonance coefficient
Q.
The impedance of the simplified system in
Figure 3 is defined as a control system that takes the motor speed
as input and outputs the motor side torque
b. Then at point a, the transfer function of the motor load impedance can be obtained as:
Among them,
F is the resonance peak factor, and
F can be expressed by the following formula:
The anti-resonant frequency
and the resonant frequency
in Formula (2) are expressed by Formulas (3) and (4), respectively:
In Formula (3),
is generally defined as the anti-mechanical resonance frequency, and the anti-mechanical resonance frequency is only related to the elastic constant and the load inertia. The mechanical resonance frequency
is related to the elastic constant, the moment of inertia of the motor, and the moment of inertia of the load. The larger the value of the elastic coefficient
K, the higher the mechanical resonance frequency, and the higher the allowable frequency bandwidth of the servo system of the aero-optical stabilization platform. It is also less prone to mechanical resonance, and the value of
is always greater than the value of
. Since the damping term coefficients of
and
are the same, when Equation (2) is a standard quadratic form, it has the same damping ratio, and its form is as follows:
From Equation (5), the resonance damping ratio coefficient can be obtained as shown in Equation (6):
It can be known from Equation (6) that the amplitude of the resonance peak point is more attenuated than the amplitude of the anti-resonance peak point. From the block diagram of the closed-loop control system in
Figure 4, the transfer function can be calculated as:
In the formula, the resonant closed-loop gain is , the cut-off frequency of the closed-loop motor control system is , and the cutoff frequency of the open loop control system is .
The structural weight reduction of the aviation optoelectronic stabilization platform and the structural stiffness, elastic coefficient and moment of inertia that affects the mechanical resonance are taken into account. The inner frame is generally made of titanium material, and the rest of the outer frame is made of aluminum material. The performance parameters of the material are shown in
Table 1. It can be seen from the specific stiffness parameters in
Table 1 that in an ideal aero-optical stabilization platform control system, it can be considered that when the stiffness coefficient
K is close to infinity, the value of
F is close to 1. When
F = 1, Equation (7) represents the closed-loop servo control system of the aviation optoelectronic stabilized platform that is not affected by resonance.
The intermediate variable of the aviation photoelectric stabilization platform control system is the motor speed , and the output variable is the motor torque T, which is a function of the current I. The influence of mechanical resonance on the velocity variable can be reflected in the Bode diagram of Equation (7). The influence of mechanical resonance on the output torque is the key to understanding the phenomenon of mechanical resonance and even the instability of the control system of the aero-optical stabilization platform.
As shown in
Figure 4, the current response in the platform mechanically resonant closed loop is:
Using Equations (7) and (8), the relationship between the two dynamic variables can be established. In the range of the anti-resonance frequency, the difference between the dynamic response of the motor speed and the current is the basis for the design of the state equalizer.
According to Equations (7) and (8), the frequency response Bode diagrams of the motor speed function and the current function are drawn as shown in
Figure 5. At the anti-resonant frequency
, the speed of the motor drops a lot and is 180° out of phase with the input
. On the other hand, the current gain rises rapidly to a maximum value at
and is in phase with the input
. That is, when the rate is the smallest, within the range of
, the amplitude of the current is always the largest. The influence of the motor backlash or hysteresis on the resonant frequency of the aviation photoelectric stabilization platform is also reflected in the amplitude change of the control voltage
E and has an effect within the range of the anti-resonance frequency change. This results in that although there is an anti-resonance point near the resonant frequency of the platform, it can suppress the amplitude of the resonant point frequency to a certain extent, but the two frequencies have a certain distance, and the suppression effect is not obvious. To sum up, when there is nonlinear interference (such as the flexible connection between the motor and the frame), the linear compensation technology cannot effectively overcome the mechanical resonance limitation of the aero-optical stabilization platform.
From the damping ratio Formula (5) and the anti-resonance frequency Expression (3), the formula for the anti-resonance damping ratio of the aviation optoelectronic stabilized platform can be obtained as follows.
In the system of a general aviation optoelectronic stabilization platform, the stiffness coefficient K and the load inertia are both known. If the coefficient b of the viscous damper can be analyzed in the frequency response characteristic, the time domain expression of the resonance peak can be expressed. The following is a method to obtain the approximate viscous damper coefficient b.
The resonance depth parameter is the most commonly used method to express the difference between the two frequency points before and after the amplitude attenuation to −3 dB. Moreover, considering that the central anti-resonance frequency is
, the anti-resonance coefficient
can be expressed by the following formula:
The anti-resonance coefficient can also be represented by the viscous damper coefficient
b and the stiffness coefficient
K in the parallel system, and its specific form is as follows:
From Equations (9) and (11), it can be known that the anti-resonance damping ratio is:
Then the effect of the viscous damper coefficient b on the anti-resonance peak
Q is shown in
Figure 6. By calculating the amplitude of the motor speed Bode diagram in
Figure 6, when the amplitude of the motor speed attenuates to −3 dB, the difference between the two frequency points is
. The value of
can be calculated to obtain an approximation of the viscous damper coefficient
b. It can be analyzed from
Figure 6 that the larger the viscous damping coefficient, the smaller the corresponding anti-resonance peak value will be.
The azimuth axis of the aviation photoelectric stabilization platform is further modeled by white noise sweep frequency, and then the ident toolbox of MATLAB is used for data processing. The amplitude-frequency characteristic curve and phase-frequency characteristic curve of the structure model of the aviation photoelectric stabilization platform is obtained as shown in
Figure 7.
It can be seen from the response curve of the platform model that there is a mechanical resonance in the model, where 300.5 rad/s is the anti-resonance point of the platform structure, and 431.1 rad/s is the resonance point of the platform structure. At the same time, the phase of the model also changes abruptly between the two resonance peaks, as shown in
Figure 7. The above two resonance peaks have a great impact on the closed-loop control performance of the system. First, the existence of mechanical resonance will lead to inaccurate model identification, which in turn leads to the inaccurate design of subsequent controllers. Secondly, in closed-loop control, the sudden change of system gain and phase near the resonance point and anti-resonance point makes the system prone to chattering or even instability. Therefore, it is of great significance to use an appropriate method to suppress the influence of the disturbance caused by the mechanical resonance on the design of the control system.
2.2. Disturbance Observer
Disturbance Observer (DOB) is a control method designed according to the principle of the internal model, and it is also one of the most commonly used anti-disturbance control algorithms. The basic principle is to estimate the difference between the actual output and the ideal output of the controller through the nominal model and use it as an estimated disturbance to compensate for the control quantity, thereby achieving the purpose of suppressing external disturbances. The basic schematic diagram is shown in
Figure 8, where
is the actual model of the controlled object;
is the nominal model of the controlled object;
is the low-pass filter. It can reduce the influence of measurement noise on the system stability, but it will cause the phase decay of the disturbance observation value, and then affect the compensation effect of the disturbance;
is the total external equivalent disturbance;
is the disturbance amount observed by the DOB;
is the detection noise;
is the input of the control system;
is the output of the control system.
According to the above
Figure 8, the relationship between the total output
of the system, the input u and the equivalent disturbance
d can be deduced at this time, as shown in Equation (13),
is the transfer function from the control quantity to the system output,
is the transfer function from the equivalent disturbance to the system output, and
is the transfer function from the measurement noise to the system output:
In an ideal situation, the nominal model of the plant is equal to the actual model
, and the low-pass filter
has a gain of 1 at low frequencies at this time:
It can be seen from (14) that when the disturbance
d has no effect on the output, the external equivalent disturbance of the system is completely suppressed, but the sampling noise is also added to the output through the filter without limitation. At the same time, in order to suppress the influence of the high frequency noise of the sensor, the gain of
in the high frequency band should be 0. If the high-frequency components in the disturbance
are to be suppressed, the cutoff frequency of the low-pass filter
is required to be as high as possible; but at the same time, in order to suppress the high-frequency noise caused by the mechanical resonance of the aero-optical stabilization platform structure, the cut-off frequency of
is required to be as low as possible, which is the biggest contradiction faced by the interference observer in the application process. In this paper, the speed closed-loop method of the state equalizer can be used to increase the frequency of the mechanical resonance of the aviation photoelectric stabilization platform, The cutoff frequency of a is further increased to take into account the robust stability of the interference observer and the ability to suppress high-frequency noise. In the actual working process, due to the existence of mechanical resonance, the design of
is limited, which in turn limits the further improvement of the system disturbance suppression capability. For the high-frequency mechanical resonance frequency, since it is much larger than the disturbance frequency of the system, it has little effect on the design of
and can be ignored. For the low-frequency mechanical resonance frequency, its impact on the design of
how to overcome the limitation of the low-frequency mechanical resonance frequency is also the focus of this paper. In the DOB algorithm, the choice of the low-pass filter
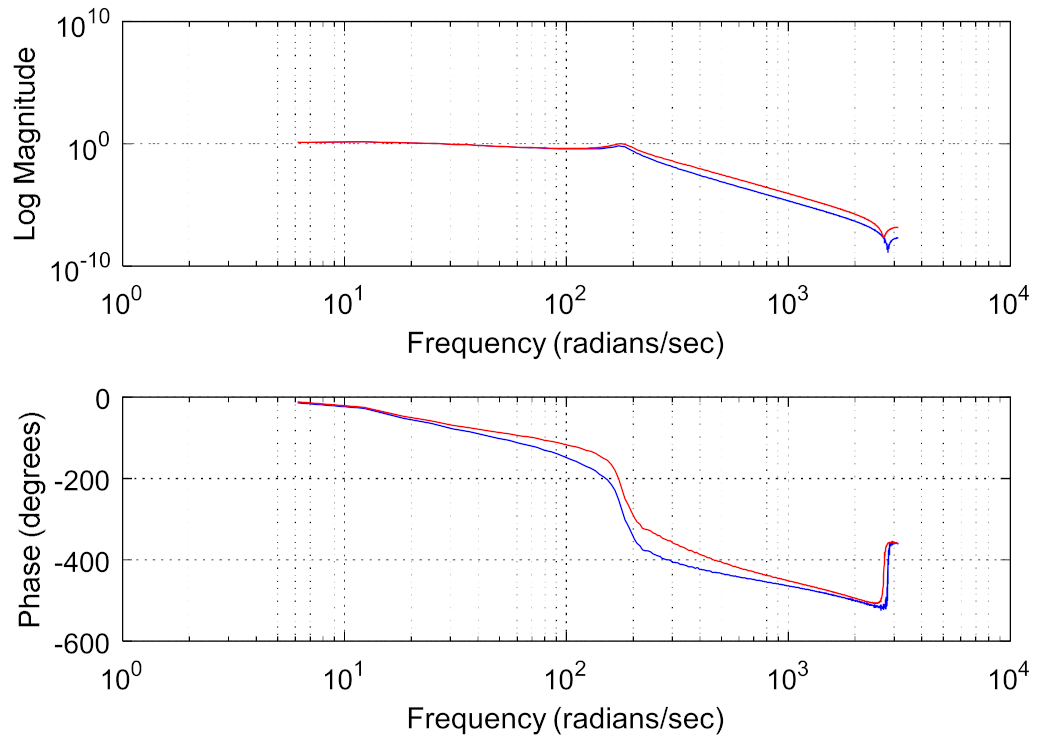
has a certain influence on the phase of the control system. Although the effect of the low-pass filter
on the phase cannot be completely eliminated by adding a state equalization speed closed loop, the red curve (PI+DOB + state equalizer) and the blue curve (PI+DOB) are shown in
Figure 9. As can be seen from the figure, the speed closed-loop method of the state equalizer proposed in this paper can improve the system bandwidth, achieve the purpose of suppressing the system resonance and improve the system anti-interference ability. Moreover, on this basis, the bandwidth of
can be designed to be higher. However, how to design a higher
bandwidth and reduce the impact of phase lag on the system’s anti-jamming capability is also the focus of future research in this paper.
2.3. State Equalizer Speed Closed Loop
When the state equalizer speed closed-loop is applied to the motor speed and system current response characteristics in
Figure 4, a balanced speed response will be produced, regardless of the magnitude of the input signal, the motor speed and torque response characteristics will remain balanced over the resonant frequency range. Finally, the frequency response of the system is made smooth, which has a good inhibitory effect on the mechanical resonance of the control system of the aviation photoelectric stabilization platform.
The design method of the state equalizer is to add a resonant equalization speed closed loop based on the closed-loop resonant circuit of
Figure 4, as shown in Figure 11, to suppress the influence of mechanical resonance on the stability of the optoelectronic control system. After the design of the state equalizer is completed, it can be reversely compensated into the control system to achieve the purpose of correcting the model and suppressing the resonance. The schematic diagram of its model calibration is shown in
Figure 10.
In order to obtain the speed and current closed-loop response characteristics of the platform control system, the function of the armature current I (torque) is subtracted from the voltage signal
(speed) of the measurement data of the gyro and other measuring instruments. According to
Figure 11, the closed-loop rate transfer function of the following state equalizer can be obtained as follows:
Comparing Equation (7) with Equation (15), it can be seen that the resonance crest factor
F is multiplied by the denominator term of the term
including the equalizer. At this time, the parameter term of the state equalizer can be expressed as the following equation.
And: the coefficients of the state equalizer .
The closed-loop transfer function can be simplified to:
It can be seen from
Figure 10 that the value of the state balance coefficient
in Equation (17) should not exceed 1, which can avoid the instability of the current closed-loop feedback loop, and its value range can be between 0–1, depending on the actual mechanical resonance frequency value. When
is equal to 1, or close to 1, the mechanical resonance frequency
in Equation (15) is also eliminated. At this time, the closed-loop bandwidth of the aviation photoelectric stabilization platform control system is mainly determined by the amplifier coefficient
. At this time, the resonance crest factor
F can be completely eliminated, and then the influence of mechanical resonance on the control system of the aviation photoelectric stabilization platform can be eliminated. It can further improve the bandwidth of the speed loop servo controller of the aviation photoelectric stabilization platform, so as to achieve the purpose of suppressing the influence of external disturbances on the platform. Ultimately, the Los stabilization accuracy of the aviation photoelectric stabilization platform is higher.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}