
Design and Experimental Study of a Tetragonal Rotor Pump Based on Wankel Geometry
 ,
,
Abstract
:1. Introduction
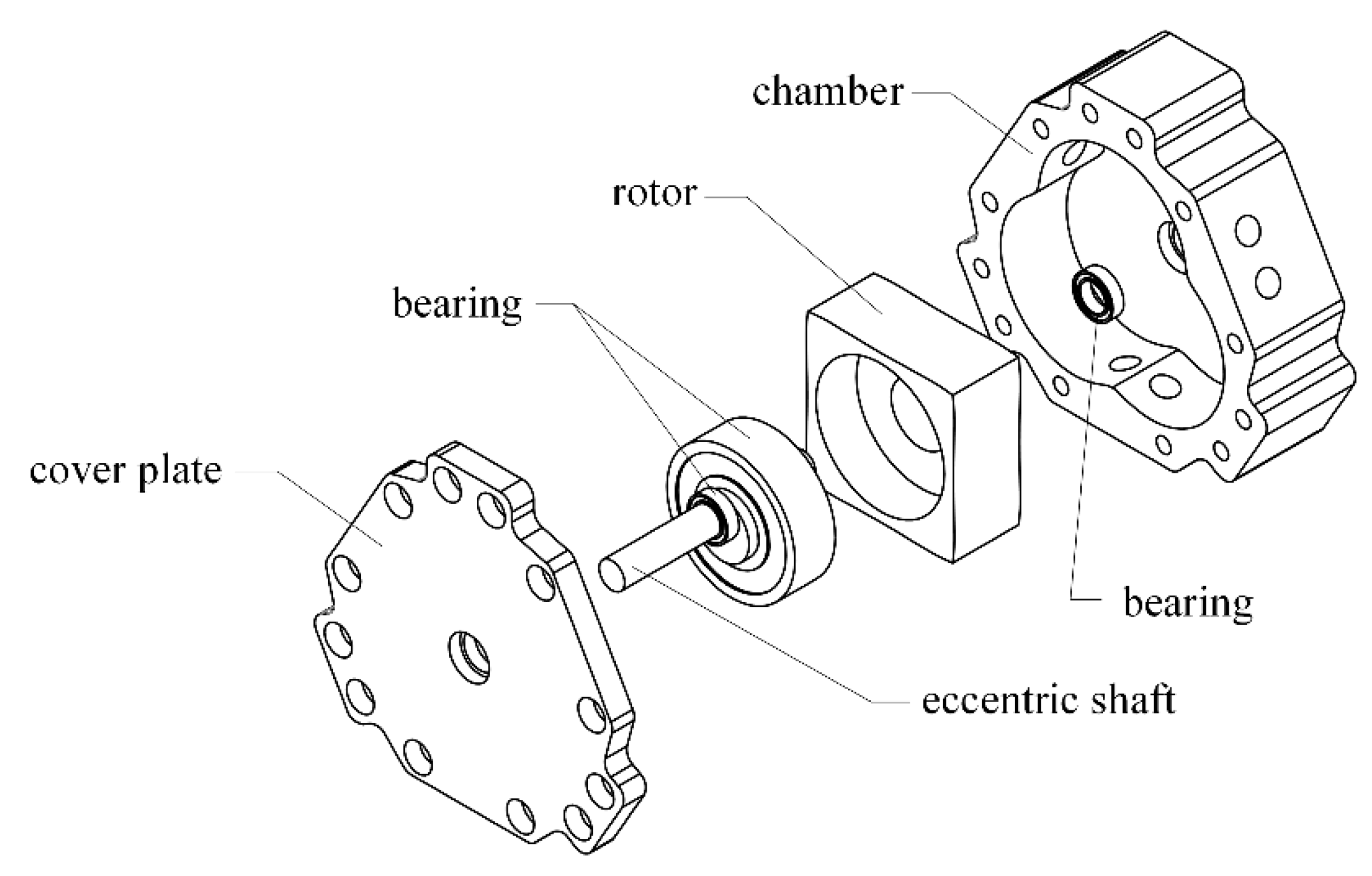
2. Structure and Working Principle of the TRP
3. Mathematical Description of the Pump Geometry
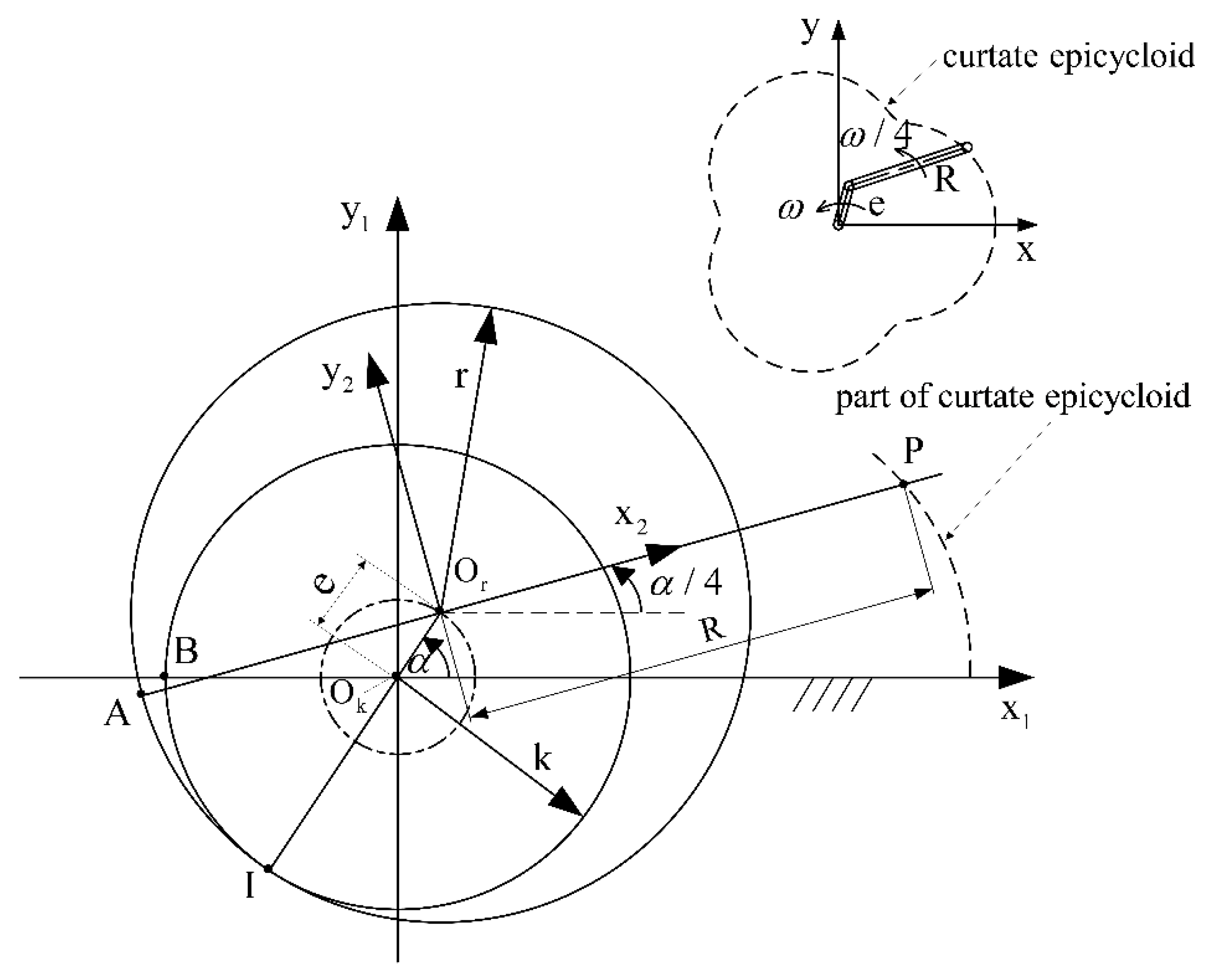
3.1. Mathematical Equations of Chamber Profile
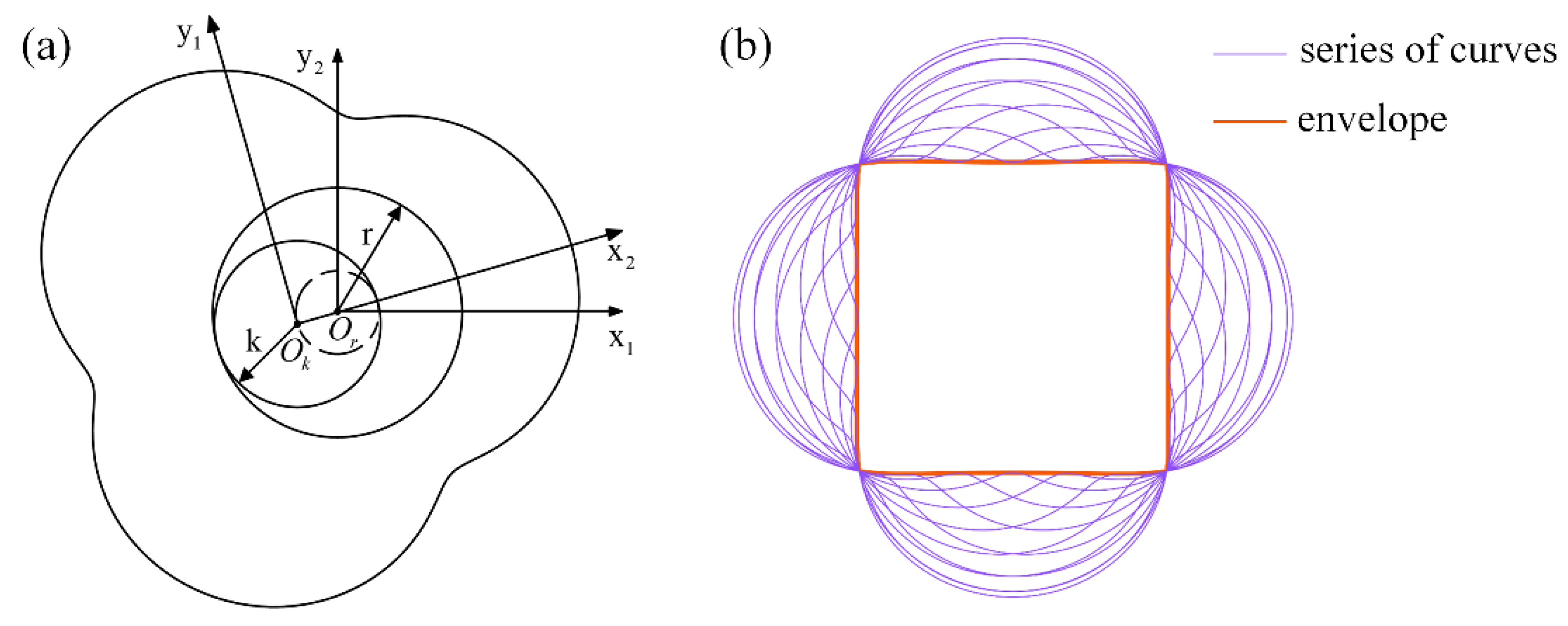
3.2. Mathematical Equations of Rotor Profile
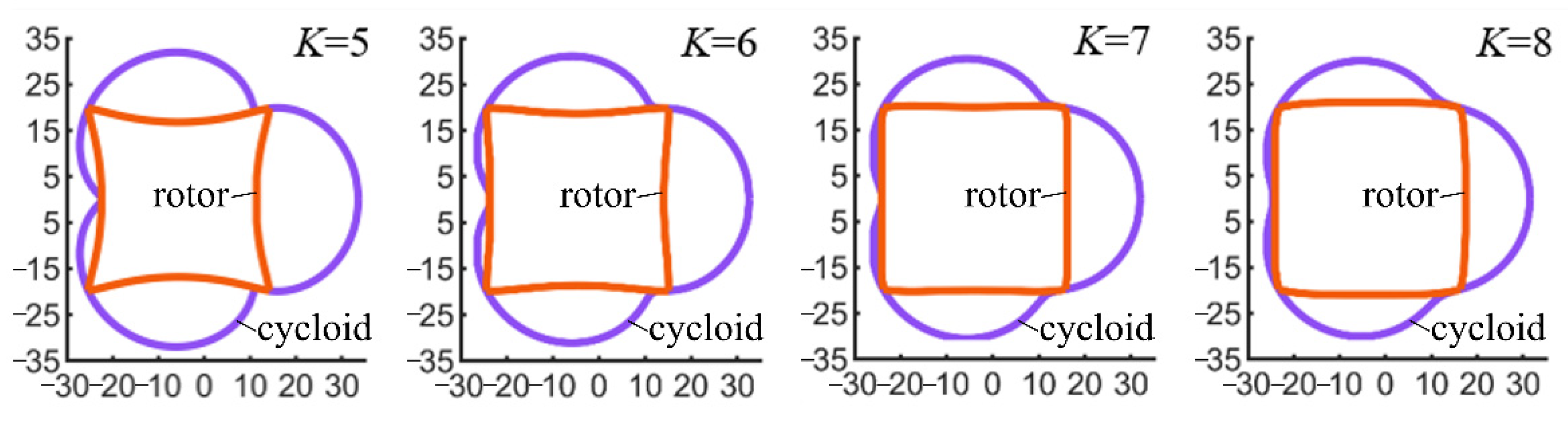
3.3. Shape Factor K
4. Kinematic Analysis of the TRP
4.1. Velocity Analysis of the TRP
4.2. Acceleration Analysis of TRP
5. Flow Rate of the TRP
5.1. Theoretical Flow Rate
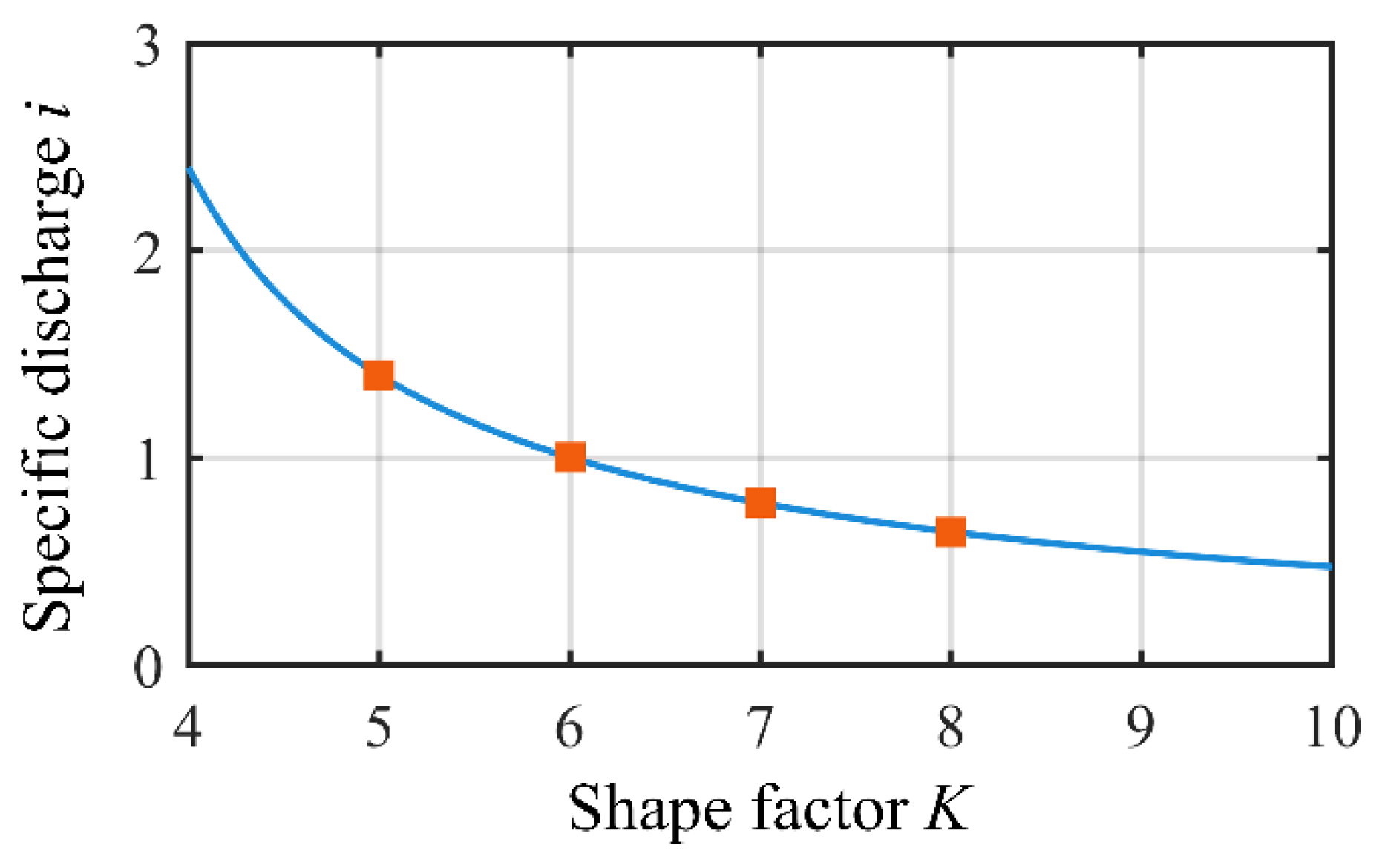
5.2. Specific Flow Rate
5.3. Flow Rate Irregularity
6. Experiments
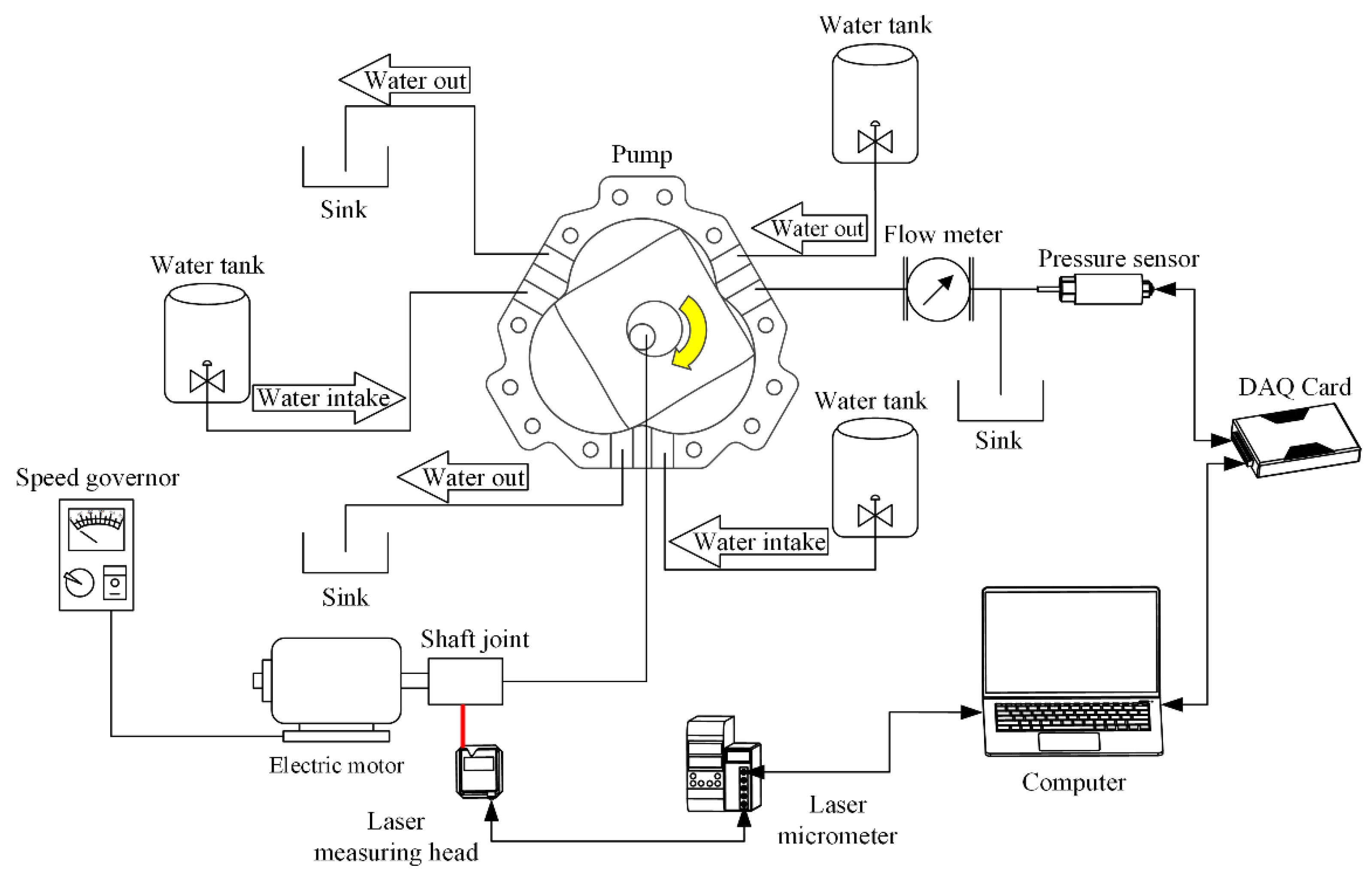
6.1. Experimental Design
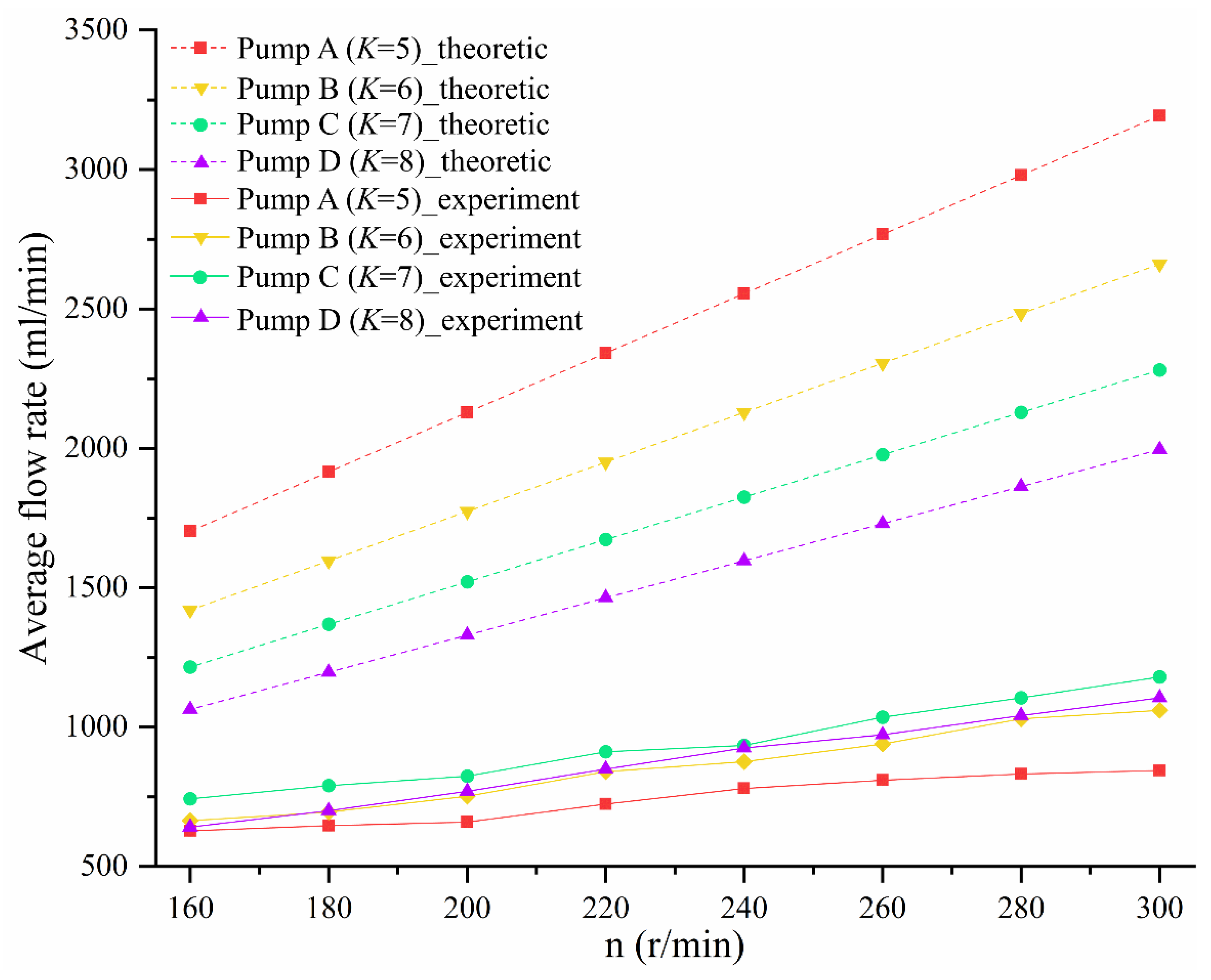
6.2. The Impact of Shape Factor on Flow Rate
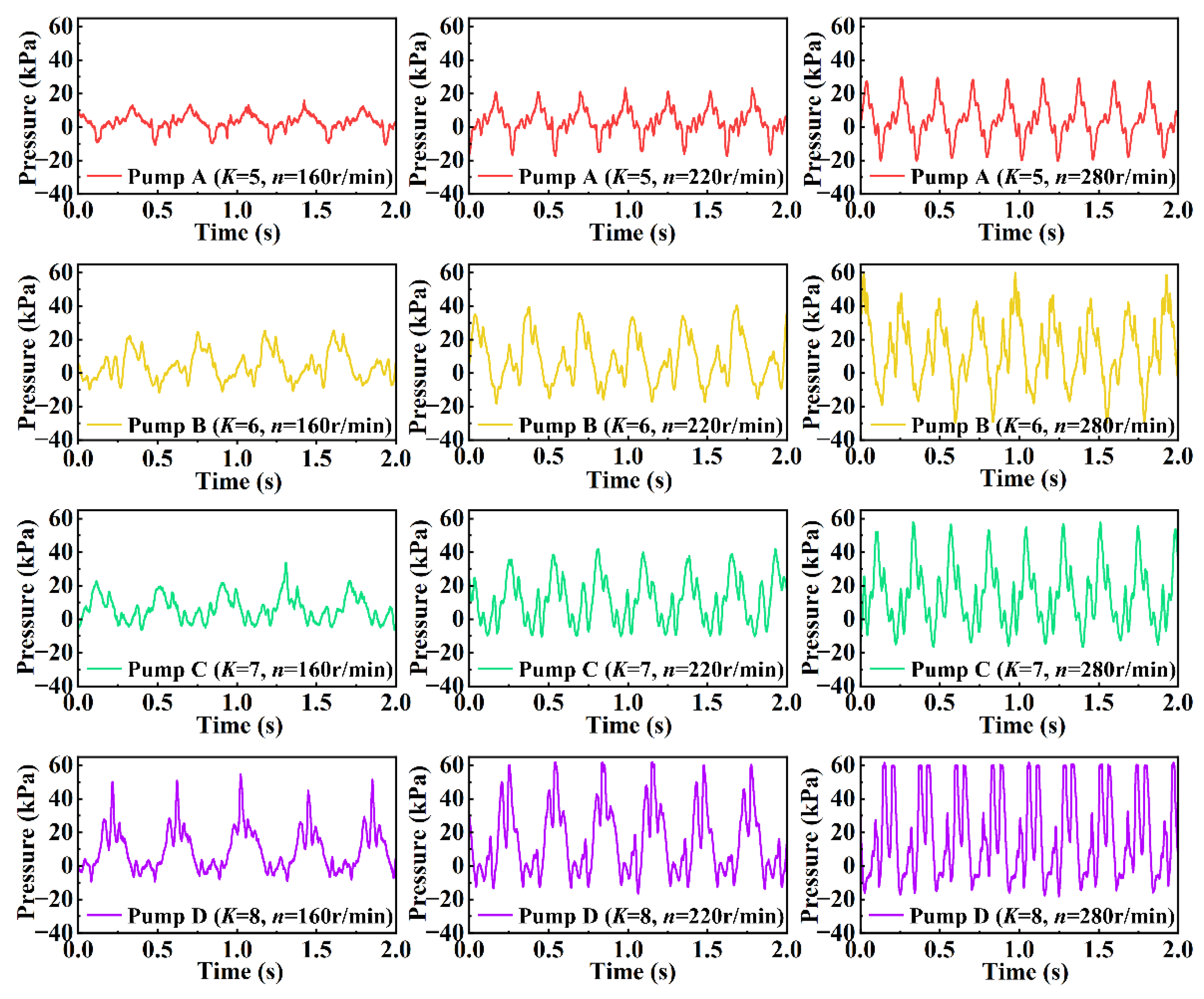
6.3. The Impact of Shape Factor on Pressure
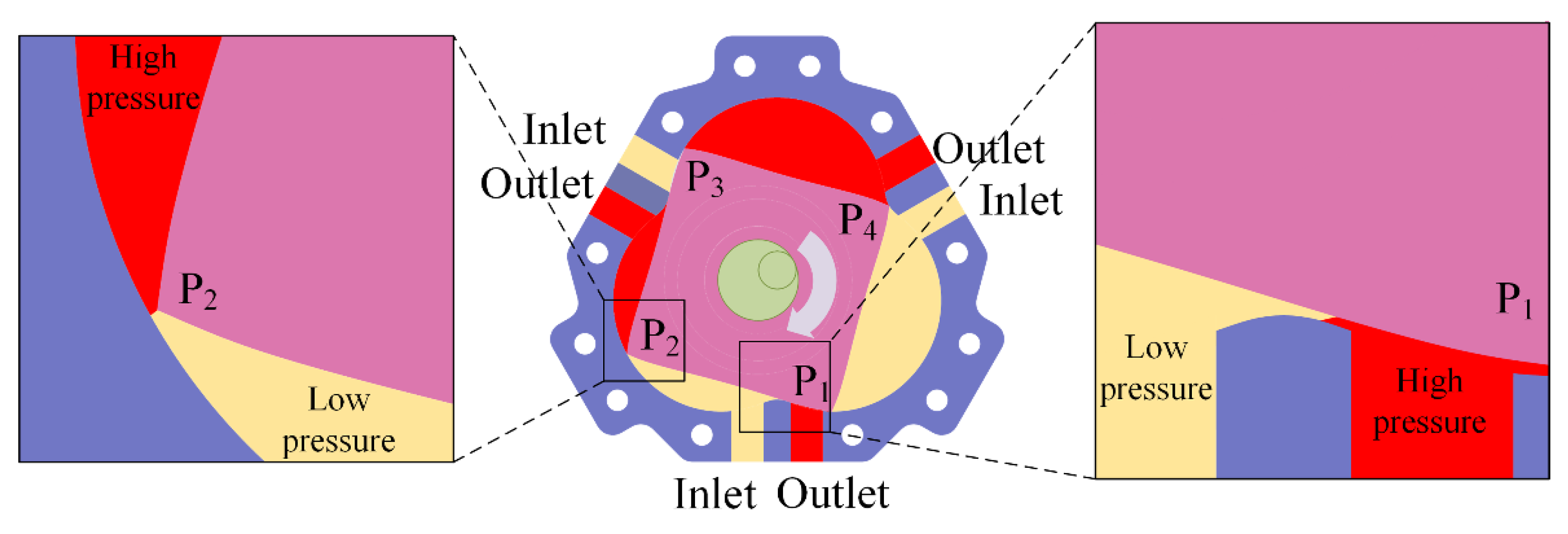
6.4. Observation of Flow Field in the TRP
7. Conclusions
- (1)
- First, the closed equation of the chamber profile of the chamber was derived, which can be described by mathematically creating an epicycloid. Then, the closed equation of the rotor profile was derived. The rotor profile is the conjugate envelope of the chamber profile.
- (2)
- The chamber profile and rotor profile can be determined by the eccentric distance (e) and the generating radius (R), and their ratio is defined as the shape factor (K). According to the industry-standard K-value range of 6~8, in this study, we analyzed the influence of four groups with different shape factors K (5, 6, 7, and 8) on the kinematic characteristics, theoretical flow rate, and specific flow rate of the proposed tetragonal rotor pump.
- (3)
- We deduced the equations of rotor apex velocity and acceleration, which with the shape factor (K). Analysis of the influence of K on the kinematic characteristics shows that the higher the K value, the lower the fluctuation of the rotor apex velocity and the smaller the apex acceleration, which is conducive to reducing the interface wear between the rotor and the chamber.
- (4)
- We also deduced the equation of the theoretical flow rate, which changed with K. Because the difference between the maximum chamber area and the minimum chamber area () decreases as the value of K increases, the higher the K value, the lower the theoretical flow rate of the pump. Furthermore, we deduced the equation for the variation in specific flow rate relative to the shape factor (K). Our analysis shows that the lower the K value, the higher the specific flow, which means that the rotor per unit volume can pump more fluid, and the overall structure of the pump is more compact. We also derived the flow rate irregularity of a tetragonal rotor pump. Compared with existing rotary positive-displacement pumps (bicornous rotor pumps and triangular rotor pumps) based on the Wankel engine structure, the TRP has lower flow rate irregularity.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Wankel, F. Rotary Piston Machines; ILIFFE Books, Ltd.: London, UK, 1963. [Google Scholar]
- Yanamoto, K. Rotary Engine; Toyo Kogyo Co., Ltd.: Yokkaichi, Japan, 1981. [Google Scholar]
- Ansdale, R.F.; Lockley, D.J. The Wankel RC Engine; design and performance; Iliffe: London, UK, 1968. [Google Scholar]
- Hege, J.B. The Wankel Rotary Engine: A History; McFarland: Exeter, NC, USA, 2007. [Google Scholar]
- Felix, W.; Ernst, H. Rotary Internal Combustion Engine. U.S. Patent 2,988,065, 13 June 1961. [Google Scholar]
- Chen, S. Parameter design of single-side asymmetry cycloid-pin-tooth arc of compressor rotor. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 5596–5599. [Google Scholar]
- Moesch, T.W.; Janitschke, T.; Thomas, C.; Hesse, U. Analysis of cycloid type vacuum compressors for water vapor compression systems at sub-atmospheric pressures. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 604, p. 012008. [Google Scholar]
- Gopal, V.V.; Seshadri, S. Effect of cut-off and compression ratio on the isentropic efficiency during off-design and part-load operations of a Wankel rotary steam expander used for small scale cogeneration. Appl. Therm. Eng. 2022, 207, 118212. [Google Scholar] [CrossRef]
- Francesconi, M.; Dori, E.; Antonelli, M. Analysis of Balje diagrams for a Wankel expander prototype. Appl. Energy 2019, 238, 775–785. [Google Scholar] [CrossRef]
- Francesconi, M.; Caposciutti, G.; Antonelli, M. An experimental and numerical analysis of the performances of a Wankel steam expander. Energy 2018, 164, 615–626. [Google Scholar] [CrossRef]
- Sadiq, G.A.; Tozer, G.; Al-Dadah, R.; Mahmoud, S. CFD simulations of compressed air two stage rotary Wankel expander—Parametric analysis. Energy Convers. Manag. 2017, 142, 42–52. [Google Scholar] [CrossRef]
- Wan, S.; Lau, M.W.S.; Goh, K.L. Gearless Wankel-like pump/mixer: Design challenges and prospects. In Proceedings of the 2017 3rd International Conference on Power Generation Systems and Renewable Energy Technologies (PGSRET), Johor Bahru, Malaysia, 4–6 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 32–37. [Google Scholar]
- Monties, J.R.; Havlik, P.; Mesana, T.; Trinkl, J.; Tourres, J.L.; Demunck, J.L. Development of the Marseilles pulsatile rotary blood pump for permanent implantable left ventricular assistance. Artif. Organs 1994, 18, 506–511. [Google Scholar] [CrossRef] [PubMed]
- Monties, J.R.; Mesana, T.; Havlik, P.; Trinkl, J.; Demunck, J.L.; Candelon, B. Another way of pumping blood with a rotary but noncentrifugal pump for an artificial heart. Asaio Trans. 1990, 36, M258. [Google Scholar] [PubMed]
- Mitsui, N.; Havlik, P.; Mesana, T.; Trinkl, J.; Tourres, J.L.; Demunck, J.L.; Candelon, B.; Montiès, J.R. An electrically-driven rotary blood pump based on the Wankel engine. In Heart Replacement; Springer: Tokyo, Japan, 1993; pp. 281–286. [Google Scholar]
- Monties, J.R.; Dion, I.; Havlik, P.; Rouais, F.; Trinkl, J.; Baquey, C. Cora Rotary Pump for Implantable Left Ventricular Assist Device: Biomaterial Aspects. Artif. Organs 2010, 21, 730–734. [Google Scholar] [CrossRef] [PubMed]
- Monties, J.R.E.; Trinkl, J.; Mesana, T.; Havlik, P.J.; Demunck, J.L.Y. Cora valveless pulsatile rotary pump: New design and control. Ann. Thorac. Surg. 1996, 61, 463–468. [Google Scholar] [CrossRef]
- Mitsui, N.; Fukunaga, S.; Sueda, T.; Matsuura, Y.; Havlik, P.; Trinkl, J.; Demunck, J.L.; Mesana, T.; Montiès, J.R. Study of Left Ventricular Bypass Using Wankel Type Semipulsatile Blood Pump. Artif. Organs 2015, 22, 419–425. [Google Scholar] [CrossRef] [PubMed]
- Lau, M.W.S.; Wan, S.; Goh, K.L.; Leong, J.; Lim, A. Design module for the industry design and development of a novel gearless Wankel-like mixer–pump: The Lau–Wan mixer. Int. J. Mech. Eng. Educ. 2016, 44, 220–232. [Google Scholar] [CrossRef] [Green Version]
- Lim, B.Y.; Lau, M.W.S.; Wan, S.; Leong, J.; Lim, A.; Huo, D.; Goh, K.L. Development of a two-stage Lau-Wan Wankel pump/mixer. Int. J. Mech. Eng. Educ. 2016, 44, 97–112. [Google Scholar] [CrossRef]
- Wan, S.; Leong, J.; Ba, T.; Lim, A.; Kang, C.W. Numerical Characterization of the Performance of Fluid Pumps Based on a Wankel Geometry. J. Fluids 2014, 2014, 1304–1313. [Google Scholar] [CrossRef]
- Li, S.; Li, M.; Xiao, Z.; Zhang, Q. Study on a New Design of Grouting Pump for Managing Water Inrush in Karst Tunnels. Civ. Eng. J. 2018, 2018, 364–379. [Google Scholar] [CrossRef]
- Li, M.; Li, S.; Zhang, X.; Zhang, Q.; Wang, Z.; Hao, P. Performance evaluation and flow analysis of two-cylinder triangular rotor pump based on experiment and numerical simulation. J. Adv. Mech. Des. Syst. Manuf. 2019, 13, JAMDSM0003. [Google Scholar] [CrossRef]
- Li, M.; Zhang, X.; Yang, W.; Zhang, J.; Zhou, Z. Sealing System Analysis of Rotary Piston Pump. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Nice, France, 22–24 February 2019; IOP Publishing: Bristol, UK, 2019; Volume 520, p. 012005. [Google Scholar]
- Colbourne, J.R. The geometry of trochoid envelopes and their application in rotary pumps. Mech. Mach. Theory 1974, 9, 421–435. [Google Scholar] [CrossRef]
- Litvin, F.L.; Feng, P.H. Computerized design and generation of cycloidal gearings. Mech. Mach. Theory 1996, 31, 891–911. [Google Scholar] [CrossRef]
- Ma, H.L.; Kuo, C.H.; Chen, C.C. Chamber contour design and compression flow calculations of rotary engine. J. CCIT 2010, 39, 35–50. [Google Scholar]
- Robinson, F.J.; Maclean, D.N. The variation of chamber volume with rotor angle in trochoidal machines with cuspal sealing. Mech. Mach. Theory 1980, 15, 171–178. [Google Scholar] [CrossRef]
- Stone, R. Introduction to Internal Combustion Engines; Macmillan: London, UK, 1999. [Google Scholar]
- Mitianiec, W. Modelling and simulation of working processes in Wankel engine with direct hydrogen injection system. Combust. Engines 2015, 54, 42–52. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Eccentricity (e) | Generating Radius ® | |
|---|---|---|
| Pump A (K = 5) | 5.6 | 28 |
| Pump B (K = 6) | 4.666 | 28 |
| Pump C (K = 7) | 4 | 28 |
| Pump D (K = 8) | 3.5 | 28 |
| Thickness of the Rotor | Intake/Discharge Port Size | Distance between the Intake Port and Discharge Port | |
|---|---|---|---|
| Pump A (K = 5) | 18 mm | Φ6 mm | 11 mm |
| Pump B (K = 6) | 18 mm | Φ6 mm | 11 mm |
| Pump C (K = 7) | 18 mm | Φ6 mm | 11 mm |
| Pump D (K = 8) | 18 mm | Φ6 mm | 11 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gui, Z.; Zhou, X.; Zeng, Y.; Zhang, F.; Huo, Y.; Zhang, W.; Ma, M.; Huang, X.; Zhang, J. Design and Experimental Study of a Tetragonal Rotor Pump Based on Wankel Geometry. Sensors 2022, 22, 6608. https://doi.org/10.3390/s22176608
Gui Z, Zhou X, Zeng Y, Zhang F, Huo Y, Zhang W, Ma M, Huang X, Zhang J. Design and Experimental Study of a Tetragonal Rotor Pump Based on Wankel Geometry. Sensors. 2022; 22(17):6608. https://doi.org/10.3390/s22176608
Chicago/Turabian StyleGui, Zhenzhen, Xiaosi Zhou, Yaohua Zeng, Fan Zhang, Yuxuan Huo, Weirong Zhang, Mingdong Ma, Xi Huang, and Jianhui Zhang. 2022. "Design and Experimental Study of a Tetragonal Rotor Pump Based on Wankel Geometry" Sensors 22, no. 17: 6608. https://doi.org/10.3390/s22176608