
Combined Antenna-Channel Modeling for the Harsh Horse Hoof Environment
 , , , ,
, , , ,
Abstract
:1. Introduction
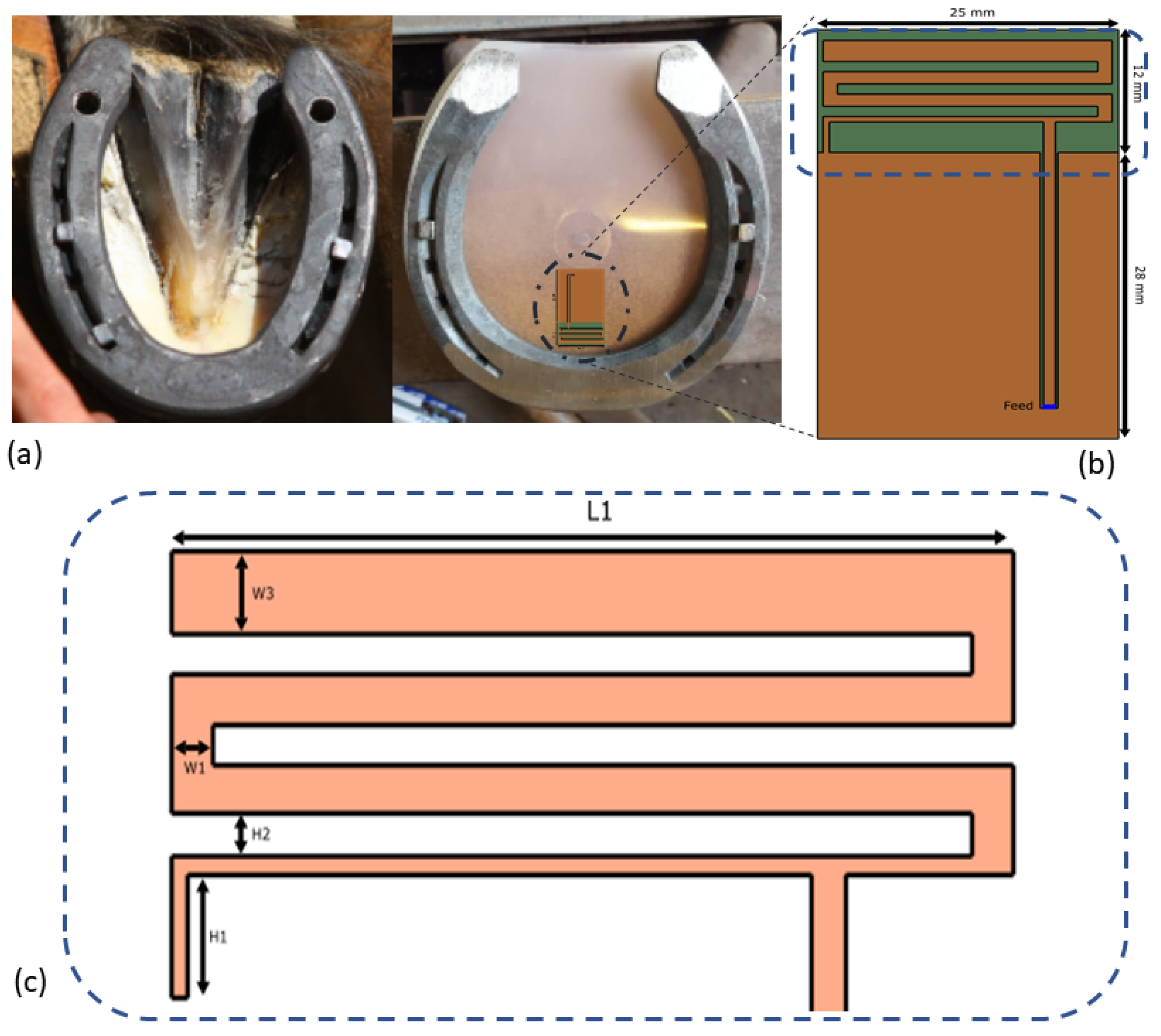
2. Planar Inverted-F Antenna Design and Phantom Model
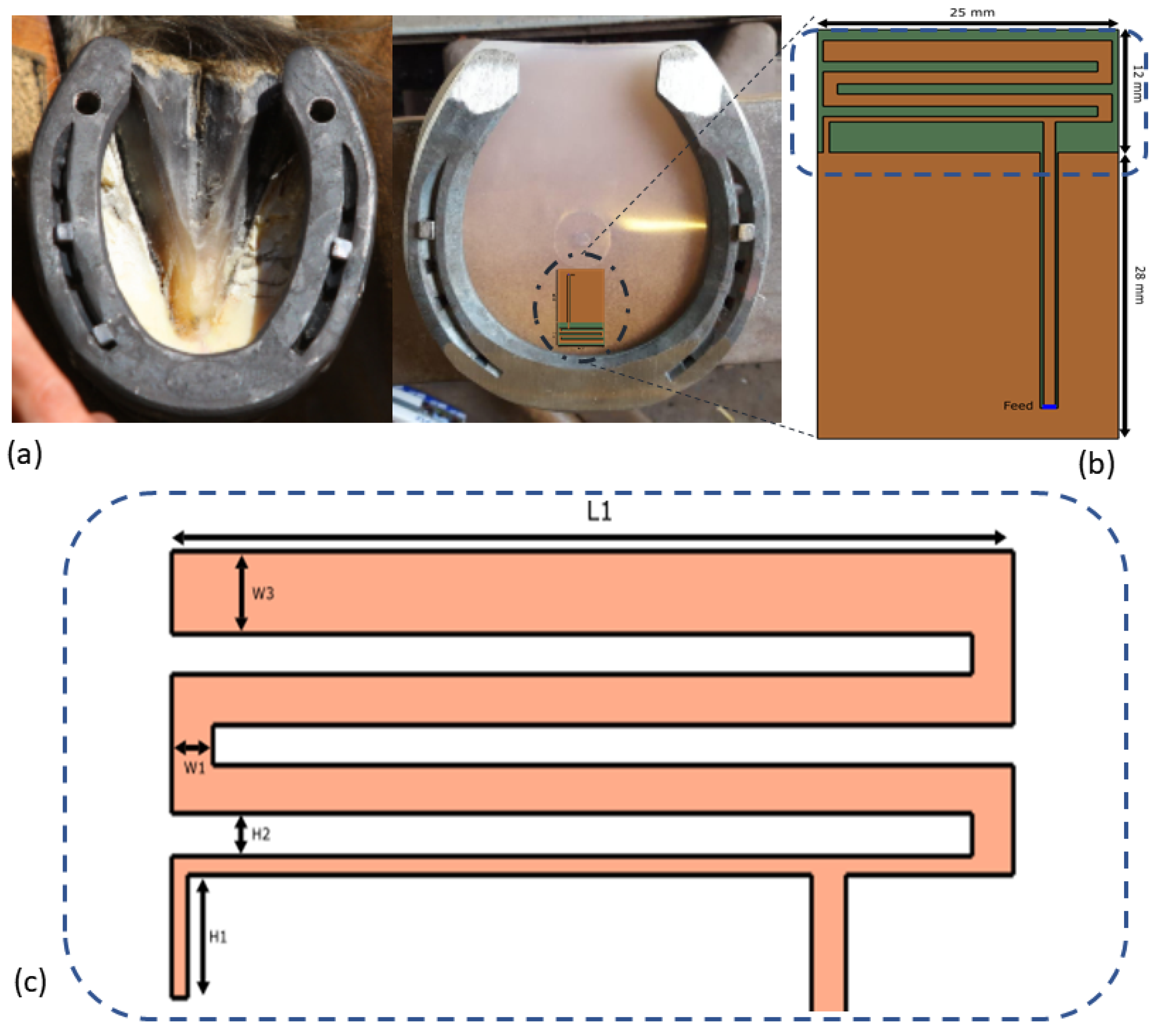
2.1. The Antenna Design
2.2. Application Scenarios
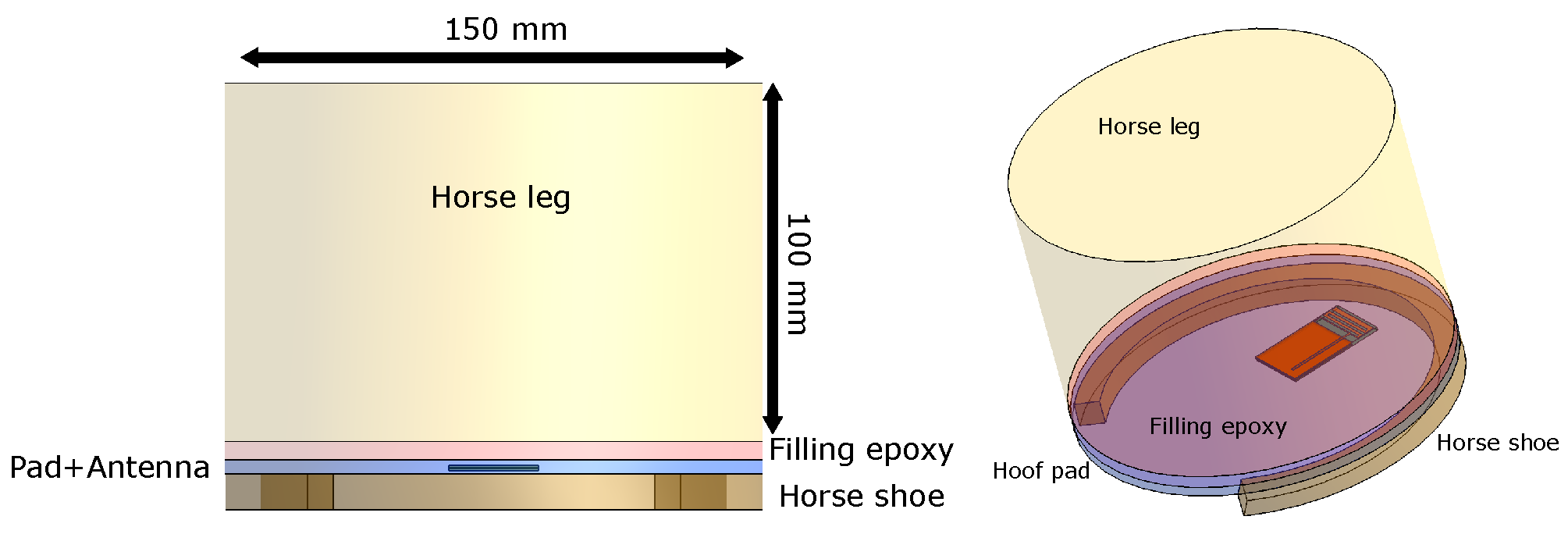
2.3. Numerical Phantom Model
2.4. Numerical Results
3. Experimental Validation
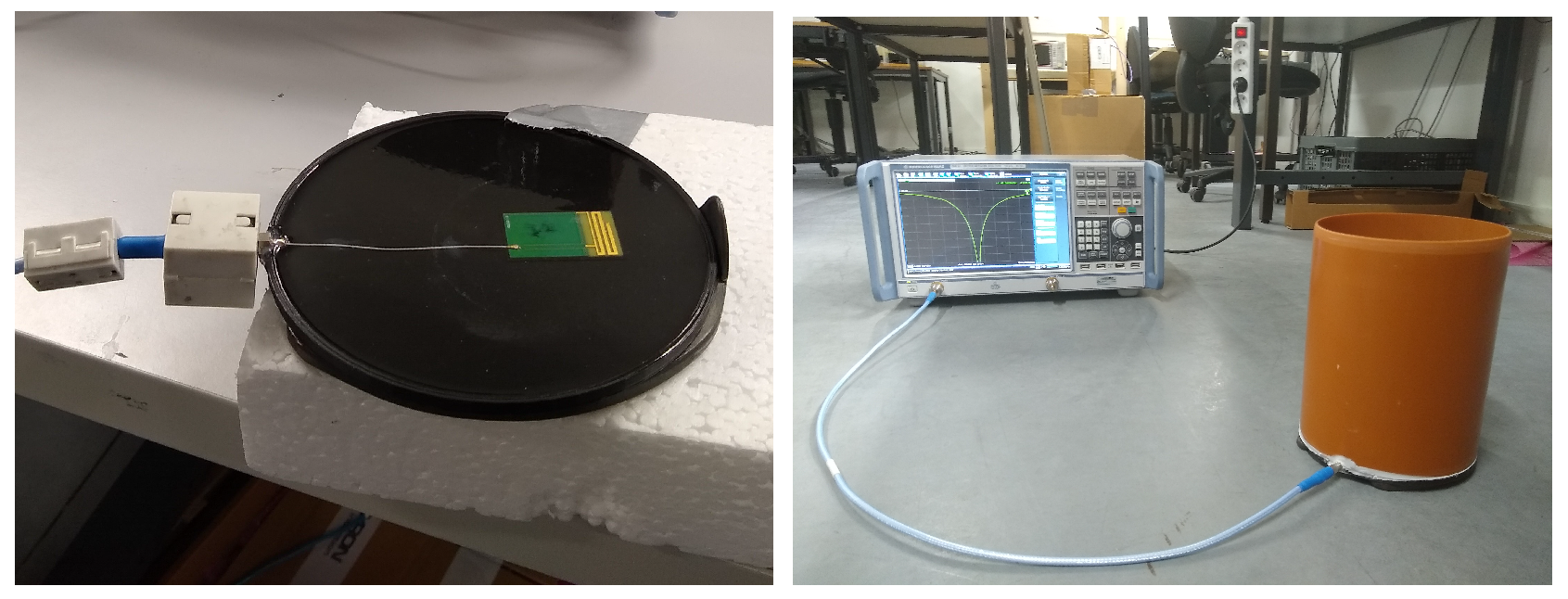
3.1. Phantom Measurements
3.2. Ex Vivo Measurements
3.3. Experimental Validation Results
4. System Loss Measurements
4.1. Path Loss Model
4.2. Radio Technology and Link Budget Calculations
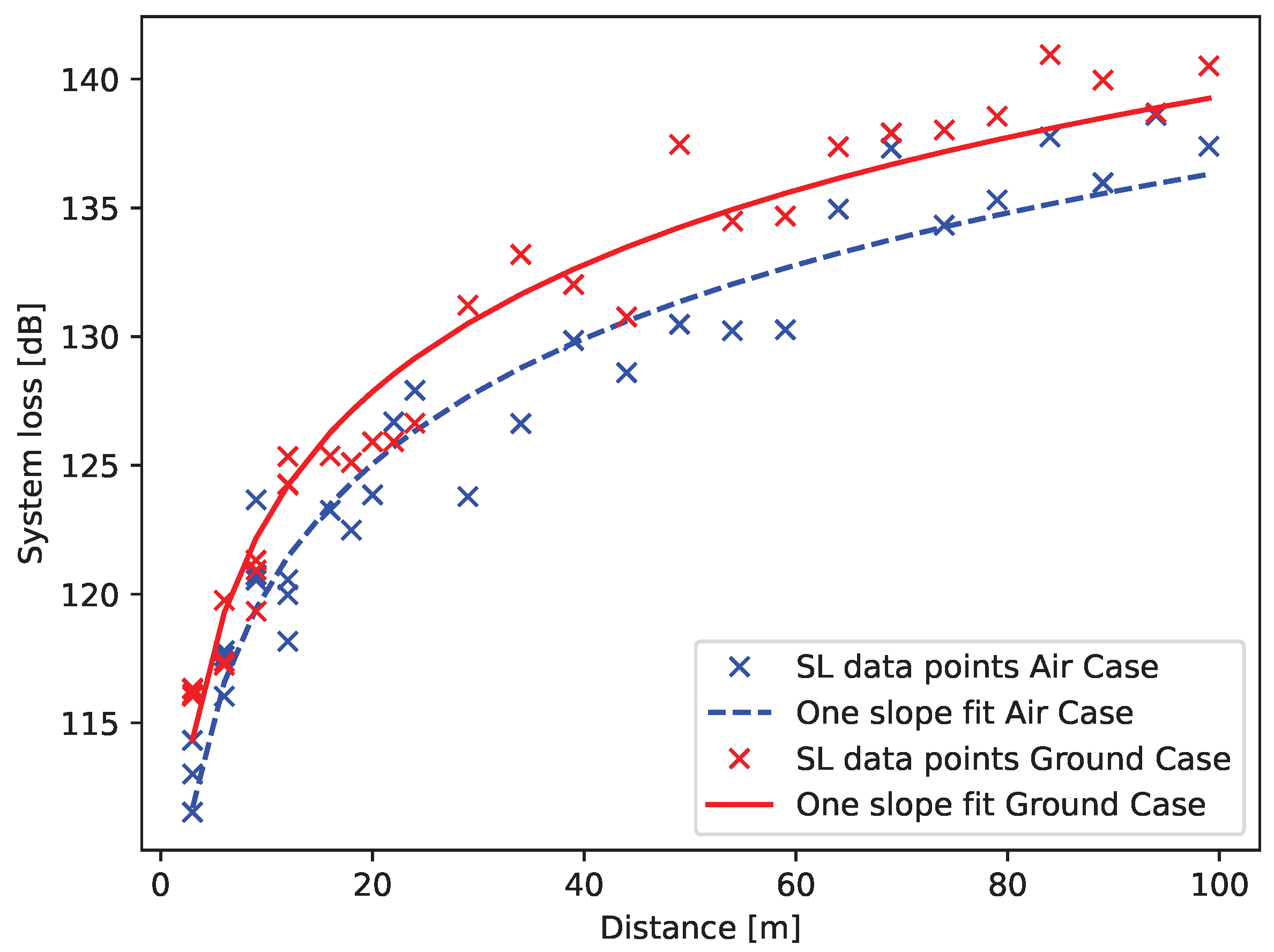
4.3. System Loss and Link Budget Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| IoAH | Internet of Animal Health |
| ISM/SDR | Industrial, Scientific and Medical/Short Range Devices |
| LoRaWAN | Longe Range Wireless Antenna Network |
| BW | Bandwidth |
| IFA | Inverted-F Antenna |
| EM | Electromagnetic |
| PEC | Perfect Electrical Conductor |
| PLA | Polylactic acid |
| S4L | Sim4Life |
| FDTD | Finite Difference Time Domain |
| PVC | Polyvinyl Chloride |
| VNA | Vector Network Analyzer |
| SF | Spreading Factor |
| SL | System Loss |
| PL | Path Loss |
References
- Fascista, A. Toward Integrated Large-Scale Environmental Monitoring Using WSN/UAV/Crowdsensing: A Review of Applications, Signal Processing, and Future Perspectives. Sensors 2022, 22, 1824. [Google Scholar] [CrossRef] [PubMed]
- Farooq, M.S.; Sohail, O.O.; Abid, A.; Rasheed, S. A Survey on the Role of IoT in Agriculture for the Implementation of Smart Livestock Environment. IEEE Access 2022, 10, 9483–9505. [Google Scholar] [CrossRef]
- Hong, M.; Ahn, H.; Atif, O.; Lee, J.; Park, D.; Chung, Y. Field-Applicable Pig Anomaly Detection System Using Vocalization for Embedded Board Implementations. Appl. Sci. 2020, 10, 6991. [Google Scholar] [CrossRef]
- Hartmann, C.; Lidauer, L.; Aurich, J.; Aurich, C.; Nagel, C. Detection of the time of foaling by accelerometer technique in horses (Equus Caballus)—A Pilot Study. Reprod. Domest. Anim. 2018, 53, 1279–1286. [Google Scholar] [CrossRef]
- Eerdekens, A.; Deruyck, M.; Fontaine, J.; Martens, L.; Poorter, E.D.; Joseph, W. Automatic equine activity detection by convolutional neural networks using accelerometer data. Comput. Electron. Agric. 2020, 168, 105139. [Google Scholar] [CrossRef]
- Eerdekens, A.; Deruyck, M.; Fontaine, J.; Martens, L.; De Poorter, E.; Plets, D.; Joseph, W. A framework for energy-efficient equine activity recognition with leg accelerometers. Comput. Electron. Agric. 2021, 183, 106020. [Google Scholar] [CrossRef]
- Equisense Motion. Available online: https://equisense.com/ (accessed on 31 July 2022).
- Ekico: Leader in Horses Hooves Monitoring Tools. Available online: https://ekico.fr (accessed on 31 July 2022).
- Tanghe, E.; Joseph, W.; Ruckebusch, P.; Martens, L.; Moerman, I. Intra-, Inter-, and Extra-Container Path Loss for Shipping Container Monitoring Systems. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 889–892. [Google Scholar] [CrossRef]
- Thielens, A.; Deckman, I.; Aminzadeh, R.; Arias, A.C.; Rabaey, J.M. Fabrication and Characterization of Flexible Spray-Coated Antennas. IEEE Access 2018, 6, 62050–62061. [Google Scholar] [CrossRef]
- Nikolayev, D.; Zhadobov, M.; Sauleau, R. Impact of Tissue Electromagnetic Properties on Radiation Performance of In-Body Antennas. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 1440–1444. [Google Scholar] [CrossRef]
- Nikolayev, D.; Joseph, W.; Zhadobov, M.; Sauleau, R.; Martens, L. Optimal Radiation of Body-Implanted Capsules. Phys. Rev. Lett. 2019, 122, 108101. [Google Scholar] [CrossRef] [Green Version]
- Ambroziak, S.J.; Correia, L.M.; Katulski, R.J.; Maćkowiak, M. Impact of radio wave polarisation on off-body communications in indoor environments. In Proceedings of the 2015 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 12–17 April 2015; pp. 1–3. [Google Scholar]
- van Roy, S.; Quitin, F.; Liu, L.; Oestges, C.; Horlin, F.; Dricot, J.M.; De Doncker, P. Dynamic Channel Modeling for Multi-Sensor Body Area Networks. IEEE Trans. Antennas Propag. 2013, 61, 2200–2208. [Google Scholar] [CrossRef]
- Gabriel, S.; Lau, R.W.; Gabriel, C. The dielectric properties of biological tissues: III. Parametric models for the dielectric spectrum of tissues. Phys. Med. Biol. 1996, 41, 2271–2293. [Google Scholar] [CrossRef]
- Kwong, K.H.; Wu, T.T.; Goh, H.G.; Sasloglou, K.; Stephen, B.; Glover, I.; Shen, C.; Du, W.; Michie, C.; Andonovic, I. Practical considerations for wireless sensor networks in cattle monitoring applications. Comput. Electron. Agric. 2012, 81, 33–44. [Google Scholar] [CrossRef]
- Kae, H.; Kwong, T.; Ta, W.; Goh, H.G.; Stephen, B.; Gilroy, M.; Michie, C.; Andonovic, I. Wireless Sensor Networks in Agriculture: Cattle Monitoring for Farming Industries. PIERS Online 2009, 5, 31–35. [Google Scholar] [CrossRef]
- Benaissa, S.; Plets, D.; Tanghe, E.; Verloock, L.; Martens, L.; Hoebeke, J.; Sonck, B.; Tuyttens, F.A.M.; Vandaele, L.; Stevens, N.; et al. Experimental characterisation of the off-body wireless channel at 2.4 GHz for dairy cows in barns and pastures. Comput. Electron. Agric. 2016, 127, 593–605. [Google Scholar] [CrossRef]
- Benaissa, S.; Plets, D.; Tanghe, E.; Trogh, J.; Martens, L.; Vandaele, L.; Verloock, L.; Tuyttens, F.; Sonck, B.; Joseph, W. Internet of animals: Characterisation of LoRa sub-GHz off-body wireless channel in dairy barns. Electron. Lett. 2017, 53, 1281–1283. [Google Scholar] [CrossRef]
- Goethals, J.; Vermeeren, G.; Nikolayev, D.; Deruyck, M.; Martens, L.; Joseph, W. Combined Antenna-Channel Characterization for Wireless Communication from Horse Hoof to Base Station. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar]
- Goethals, J.; Nikolayev, D.; Thielens, A.; Vermeeren, G.; Verloock, L.; Deruyck, M.; Martens, L.; Joseph, W. Design and Verification of an On-Body Antenna in the Harsh Environment of a Horse Hoof. In Proceedings of the 2021 15th European Conference on Antennas and Propagation (EuCAP), Dusseldorf, Germany, 22–26 March 2021; pp. 1–4. [Google Scholar] [CrossRef]
- IS400. Lead Free, Mid Tg Epoxy Laminate and Prepreg; ISOLA Group: Chandler, AZ, USA, 2021. [Google Scholar]
- Dutto, D.J.; Hoyt, D.F.; Clayton, H.M.; Cogger, E.A.; Wickler, S.J. Joint work and power for both the forelimb and hindlimb during trotting in the horse. J. Exp. Biol. 2006, 209, 3990–3999. [Google Scholar] [CrossRef]
- Kim, H.-S.; Narayanan, R. A new measurement technique for obtaining the complex relative permittivity of terrain surfaces. IEEE Geosci. Remote Sens. Lett. 2002, 40, 1190–1194. [Google Scholar] [CrossRef]
- Soutsos, M.; Bungey, J.; Millard, S.; Shaw, M.; Patterson, A. Dielectric properties of concrete and their influence on radar testing. NDT E Int. 2001, 34, 419–425. [Google Scholar] [CrossRef]
- Singha, S.; Thomas, M. Permittivity and tan delta characteristics of epoxy nanocomposites in the frequency range of 1 MHz-1 GHz. IEEE Trans. Dielectr. Electr. Insul. 2008, 15, 2–11. [Google Scholar] [CrossRef]
- Home: Zurich Med Tech. Available online: https://zmt.swiss/ (accessed on 31 July 2022).
- Balanis, C.A. Antenna Theory: Analysis and Design, 4th ed.; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Low-Profile, Ultraminiature Lightweight SMT Coaxial Connectors–0.94 or 1.2 mm Mated Height; X.FL Series Connectors—Hirose; Hirose Electric Co., Ltd.: Kanagawa, Japan, 2014.
- Equi-Pak Soft™ 210cc, Equi-Pak Soft 47118; Royal Kerckhaert Horseshoe Factory: Vogelwaarde, The Netherlands, 2019.
- Benaissa, S.; Verloock, L.; Nikolayev, D.; Deruyck, M.; Vermeeren, G.; Martens, L.; Tuyttens, F.A.M.; Sonck, B.; Plets, D.; Joseph, W. Joint Antenna-Channel Modelling for in-to-out-Body Propagation of Dairy Cows at 868 MHz. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–4. [Google Scholar]
- Saunders, S.R.; Aragón-Zavala, A. Antennas and Propagation for Wireless Communication Systems, 2nd ed.; J. Wiley & Sons: Chichester, UK; Hoboken, NJ, USA, 2007.
- SRM-3006 Field Strength Analyzer. Available online: https://www.narda-sts.com/en/selective-emf/srm-3006-field-strength-analyzer/srm-3006-3006101/ (accessed on 31 July 2022).
- LoRaWAN. The Things Network. 2020. Available online: https://www.thethingsnetwork.org/ (accessed on 31 July 2022).
- Niu, J.; Yang, X.; Liu, S.; Li, Y.; Guo, Y. Energy-efficient adaptive virtual-MIMO transmissions for LoRa uplink systems. Digit. Signal Process. 2022, 127, 103493. [Google Scholar] [CrossRef]
- Georgiou, O.; Raza, U. Low Power Wide Area Network Analysis: Can LoRa Scale? IEEE Wirel. Commun. Lett. 2017, 6, 162–165. [Google Scholar] [CrossRef]
- Chettri, L.; Bera, R. A Comprehensive Survey on Internet of Things (IoT) Toward 5G Wireless Systems. IEEE Internet Things J. 2020, 7, 16–32. [Google Scholar] [CrossRef]
- Grgić, K.; Žagar, D.; Balen, J.; Vlaović, J. Internet of Things in Smart Agriculture—Possibilities and Challenges. In Proceedings of the 2020 International Conference on Smart Systems and Technologies (SST), Osijek, Croatia, 14–16 October 2020; pp. 239–244. [Google Scholar] [CrossRef]
- Grgić, K.; Pejković, A.; Zrnić, M.; Spišić, J. An Overview of Security Aspects of IoT Communication Technologies for Smart Agriculture. In Proceedings of the 2021 16th International Conference on Telecommunications (ConTEL), Zagreb, Croatia, 30 June–2 July 2021; pp. 146–151. [Google Scholar] [CrossRef]
- Wang, D.; Chen, D.; Song, B.; Guizani, N.; Yu, X.; Du, X. From IoT to 5G I-IoT: The Next Generation IoT-Based Intelligent Algorithms and 5G Technologies. IEEE Commun. Mag. 2018, 56, 114–120. [Google Scholar] [CrossRef]
- Brewster, C.; Roussaki, I.; Kalatzis, N.; Doolin, K.; Ellis, K. IoT in Agriculture: Designing a Europe-Wide Large-Scale Pilot. IEEE Commun. Mag. 2017, 55, 26–33. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Tissue | Epoxy | Radiation | Max. Gain |
|---|---|---|---|---|
| Thickness | Efficiency | |||
| Air | Bone | 5 mm | 21% | −2.4 dBi |
| Air | Muscle | 5 mm | 1.4% | −12.6 dBi |
| Ground (concrete) | Bone | 5 mm | 14% | −2.41 dBi |
| SF | BW | Bit Rate | S | R (Air) | R (Ground) |
|---|---|---|---|---|---|
| [KHz] | [kbps] | [dBm] | [m] | [m] | |
| 7 | 500 | 21 | −117 | 26 | 18 |
| 9 | 500 | 7 | −123 | 63 | 43 |
| 11 | 500 | 2 | −128.5 | 137 | 94 |
| 12 | 250 | 0.5 | −134 | 301 | 204 |
| Ref. System Loss | Path Loss Exp. | Fitting Error | |
|---|---|---|---|
| SL [dB] | n [-] | [dB] | |
| Air | 92.70 | 1.62 | 1.93 |
| Ground | 95.71 | 1.63 | 1.79 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goethals, J.; Nikolayev, D.; Thielens, A.; Vermeeren, G.; Verloock, L.; Deruyck, M.; Martens, L.; Joseph, W. Combined Antenna-Channel Modeling for the Harsh Horse Hoof Environment. Sensors 2022, 22, 6856. https://doi.org/10.3390/s22186856
Goethals J, Nikolayev D, Thielens A, Vermeeren G, Verloock L, Deruyck M, Martens L, Joseph W. Combined Antenna-Channel Modeling for the Harsh Horse Hoof Environment. Sensors. 2022; 22(18):6856. https://doi.org/10.3390/s22186856
Chicago/Turabian StyleGoethals, Jasper, Denys Nikolayev, Arno Thielens, Günter Vermeeren, Leen Verloock, Margot Deruyck, Luc Martens, and Wout Joseph. 2022. "Combined Antenna-Channel Modeling for the Harsh Horse Hoof Environment" Sensors 22, no. 18: 6856. https://doi.org/10.3390/s22186856