
Null Broadening Robust Adaptive Beamforming Algorithm Based on Power Estimation

Abstract
:1. Introduction
- (a)
- A new null broadening method is proposed based on subspace theory, which has a deeper null and a lower side lobe level.
- (b)
- An estimation of interference signal power is proposed through the relationship between the signal direction vector and the eigenvalue and feature vector, which greatly reduces the complexity of the algorithm.
- (c)
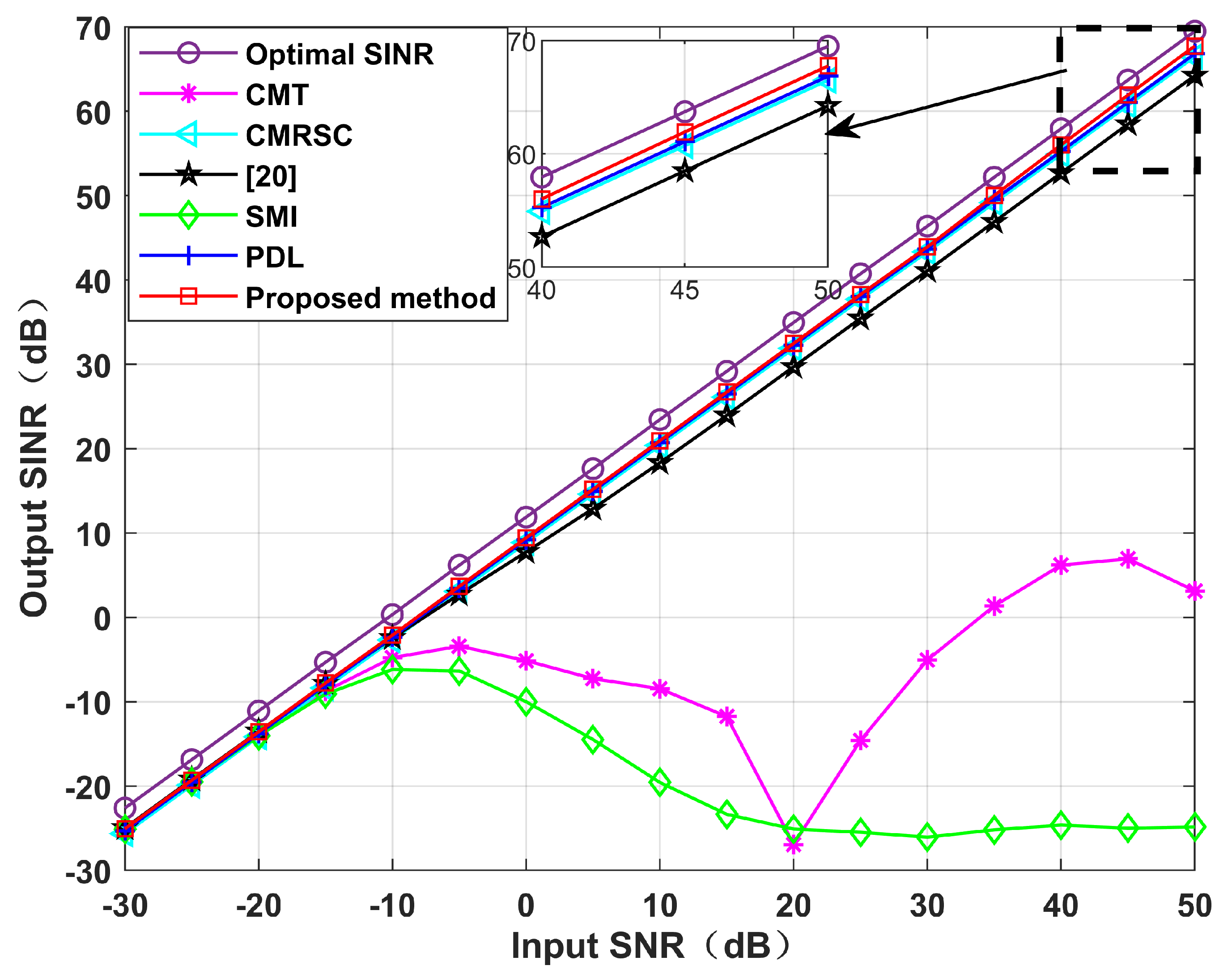
- We give the performance comparisons of the proposed and relevant beamformers using typical experiments. Simulation results show that the proposed algorithm has good performance both under ideal conditions and with DOA errors.
2. The Signal Model
3. The Proposed Algorithm
3.1. Doa Estimation
3.2. Signal Power Estimation
3.3. Null Broadening
4. Simulation Results
4.1. Effect of Different Parameters of this Paper Algorithm
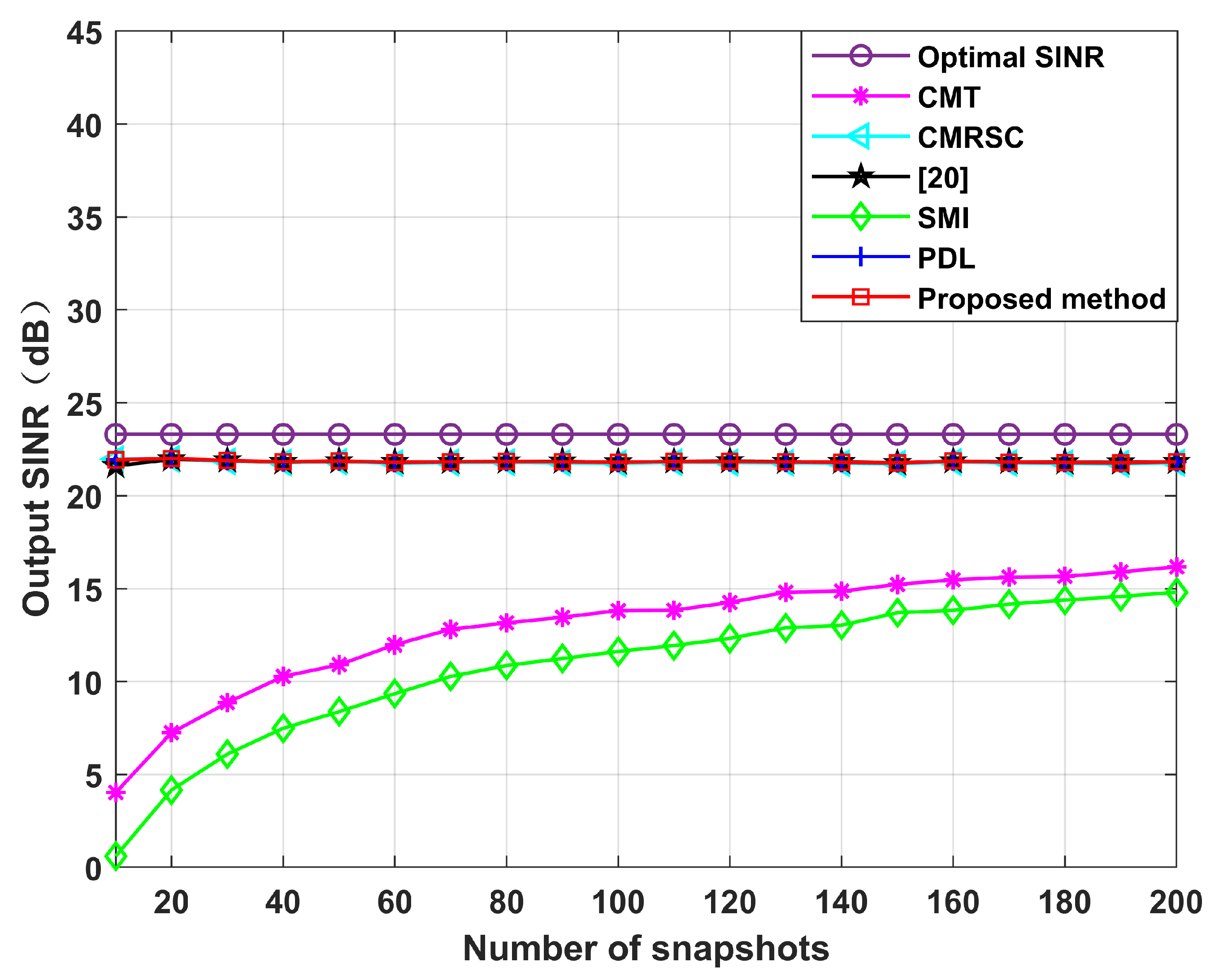
4.2. Comparison of the Proposed Algorithm and Other Algorithms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vorobyov, S.A. Principles of minimum variance robust adaptive beamforming design. Signal Process. 2013, 93, 3264–3277. [Google Scholar] [CrossRef]
- Zhu, X.; Xu, X.; Ye, Z. Robust adaptive beamforming via subspace for interference covariance matrix reconstruction. Signal Process. 2020, 167, 107289. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. Robust Adaptive Beamforming; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Vorobyov, S.A.; Gershman, A.B.; Luo, Z.Q. Robust adaptive beamforming using worst-case performance optimization: A solution to the signal mismatch problem. IEEE Trans. Signal Process. 2003, 51, 313–324. [Google Scholar] [CrossRef]
- Elnashar, A.; Elnoubi, S.M.; El-Mikati, H.A. Further study on robust adaptive beamforming with optimum diagonal loading. IEEE Trans. Antennas Propag. 2006, 54, 3647–3658. [Google Scholar] [CrossRef]
- Jia, W.; Jin, W.; Zhou, S.; Yao, M. Robust adaptive beamforming based on a new steering vector estimation algorithm. Signal Process. 2013, 93, 2539–2542. [Google Scholar] [CrossRef]
- Feldman, D.D.; Griffiths, L.J. A projection approach for robust adaptive beamforming. IEEE Trans. Signal Process. 1994, 42, 867–876. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Wang, Z. On robust Capon beamforming and diagonal loading. IEEE Trans. Signal Process. 2003, 51, 1702–1715. [Google Scholar] [CrossRef]
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Hassanien, A.; Vorobyov, S.A.; Wong, K.M. Robust adaptive beamforming using sequential quadratic programming: An iterative solution to the mismatch problem. IEEE Signal Process. Lett. 2008, 15, 733–736. [Google Scholar] [CrossRef]
- Mailloux, R. Covariance matrix augmentation to produce adaptive array pattern troughs. AP-S Int. Symp. 1995, 1, 102–105. [Google Scholar]
- Zatman, M. Production of adaptive array troughs by dispersion synthesis. Electron. Lett. 1995, 31, 2141–2142. [Google Scholar] [CrossRef]
- Guerci, J.R. Theory and application of covariance matrix tapers for robust adaptive beamforming. IEEE Trans. Signal Process. 1999, 47, 977–985. [Google Scholar] [CrossRef]
- Li, W.; Zhao, Y.; Ye, Q.; Yang, B. Adaptive antenna null broadening beamforming against array calibration error based on adaptive variable diagonal loading. Int. J. Antennas Propag. 2017, 2017, 3265236. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, S.; Zhang, G. Flexible robust adaptive beamforming method with multiple separately widened nulls. Electron. Lett. 2020, 56, 957–959. [Google Scholar] [CrossRef]
- Thakur, D.; Baghel, V.; Talluri, S.R. Robust Beamforming Against DOA Mismatch with Null Widening for Moving Interferences. Int. Symp. Signal Process. Intell. Recognit. Syst. 2020, 1365, 290–301. [Google Scholar]
- Mao, X.; Li, W.; Li, Y.; Sun, Y.; Zhai, Z. Robust adaptive beamforming against signal steering vector mismatch and jammer motion. Int. J. Antennas Propag. 2015, 2015, 780296. [Google Scholar] [CrossRef]
- Yang, B.; Li, W.; Li, Y.; Zhang, Q. Robust adaptive null broadening beamforming based on subspace projection. Int. J. Electron. 2022. [Google Scholar] [CrossRef]
- Qian, J.; He, Z.; Xie, J.; Zhang, Y. Null broadening adaptive beamforming based on covariance matrix reconstruction and similarity constraint. EURASIP J. Adv. Signal Process 2017, 2017, 1. [Google Scholar] [CrossRef]
- Yang, J.; Lu, J.; Liu, X.; Liao, G. Robust null broadening beamforming based on covariance matrix reconstruction via virtual interference sources. Sensors 2020, 20, 1865. [Google Scholar] [CrossRef]
- Mohammadzadeh, S.; Kukrer, O. Robust adaptive beamforming for fast moving interference based on the covariance matrix reconstruction. IET Signal Process. 2019, 13, 486–493. [Google Scholar] [CrossRef]
- Gershman, A.B.; Nickel, U.; Bohme, J.F. Adaptive beamforming algorithms with robustness against jammer motion. IEEE Trans. Signal Process. 1997, 45, 1878–1885. [Google Scholar] [CrossRef]
- Gershman, A.B.; Serebryakov, G.V.; Bohme, J.F. Constrained Hung-Turner adaptive beam-forming algorithm with additional robustness to wideband and moving jammers. IEEE Trans. Antennas Propag. 1996, 44, 361–367. [Google Scholar] [CrossRef]
- Amar, A.; Doron, M.A. A linearly constrained minimum variance beamformer with a pre-specified suppression level over a pre-defined broad null sector. Signal Process. 2015, 109, 165–171. [Google Scholar] [CrossRef]
- Riba, J.; Goldberg, J.; Vázquez, G. Robust beamforming for interference rejection in mobile communications. IEEE Trans. Signal Process. 1997, 45, 271–275. [Google Scholar] [CrossRef]
- Jin, W.; Guo, Y.; Jia, W.; Zhao, J. Null Broadening Robust Beamforming Based on Decomposition and Iterative Second-order Cone Programming. Radioengineering 2021, 30, 680–687. [Google Scholar] [CrossRef]
- Zhang, L.; Li, B.; Huang, L.; Kirubarajan, T.; So, H. Robust minimum dispersion distortionless response beamforming against fast-moving interferences. Signal Process. 2017, 140, 190–197. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
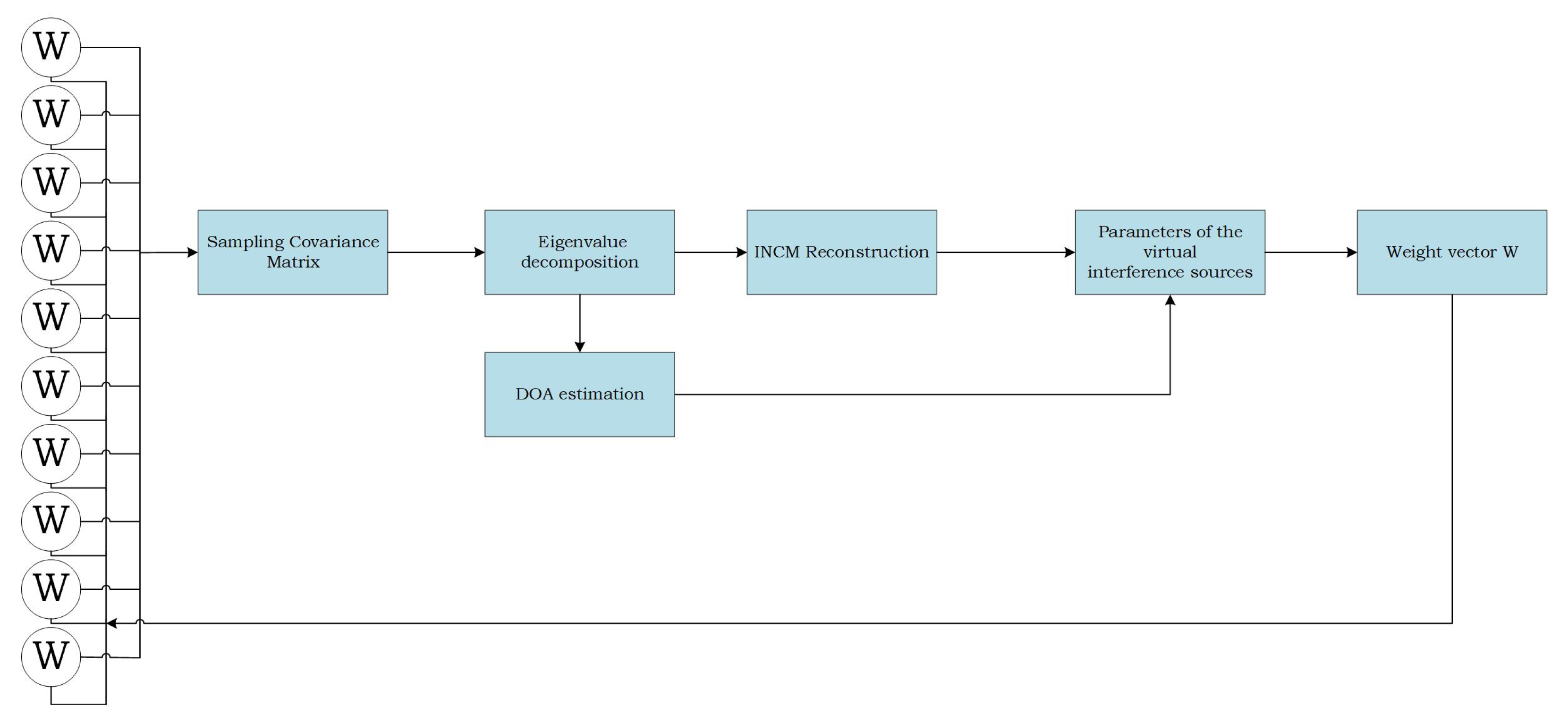
| Step 1 | Obtain the arrival angle of interference signals through Formula (14); |
| Step 2 | Find the approximate power of the signal through Formula (23), and the estimated noise power is obtained by the Formula (27); |
| Step 3 | Set the appropriate exhibition area according to the actual needs; |
| Step 4 | Reconstruct the interference-plus-noise covariance matrix according to Formula (28); |
| Step 5 | Bring and into the Formula (29), and obtain the weight vector of this algorithm. |
| Algorithms | Computational Complexity |
|---|---|
| The SMI algorithm [4] | |
| The CMT algorithm [12] | |
| The PDL algorithm [17] | |
| The CMRSC algorithm [19] | |
| The literature algorithm [20] | |
| The proposed algorithm |
| SNR | INR | Direction of Signal Signal (degree) | Direction of Interference Signal (degree) | Null Depth (dB) | Beam Width | Output SINR (dB) | Max SLL |
|---|---|---|---|---|---|---|---|
| 10 | 30 | −20 | 0, 40 | −90.9, −113 | 16.6 | 21.36 | −10.67 |
| 10 | 30 | −40 | −10, 30 | −112.9, −110.7 | 20.1 | 22.26 | −13.22 |
| 10 | 30 | 20 | −10, 50 | −116.5, −109.5 | 14.5 | 22.31 | −16.67 |
| 10 | 20 | 20 | −10, 50 | −92.53, −68.49 | 14 | 21.88 | −15.83 |
| 0 | 20 | 20 | −10, 50 | −94.44, −70 | 14.1 | 10.42 | −15.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Cui, W.; Du, Y.; Ba, B.; Quan, M. Null Broadening Robust Adaptive Beamforming Algorithm Based on Power Estimation. Sensors 2022, 22, 6984. https://doi.org/10.3390/s22186984
Yu Z, Cui W, Du Y, Ba B, Quan M. Null Broadening Robust Adaptive Beamforming Algorithm Based on Power Estimation. Sensors. 2022; 22(18):6984. https://doi.org/10.3390/s22186984
Chicago/Turabian StyleYu, Zhenhua, Weijia Cui, Yuxi Du, Bin Ba, and Mengjiao Quan. 2022. "Null Broadening Robust Adaptive Beamforming Algorithm Based on Power Estimation" Sensors 22, no. 18: 6984. https://doi.org/10.3390/s22186984
APA StyleYu, Z., Cui, W., Du, Y., Ba, B., & Quan, M. (2022). Null Broadening Robust Adaptive Beamforming Algorithm Based on Power Estimation. Sensors, 22(18), 6984. https://doi.org/10.3390/s22186984