


Improvement of Baro Sensors Matrix for Altitude Estimation

 ,
,  , , , , , and
, , , , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
- Operation range: Pressure: 300–1200 hPa. Temperature: −40–85 °C.
- Pressure sensor precision: ±0.005 hPa (or ±0.05 m) (high-precision mode).
- Relative accuracy: ±0.06 hPa (or ±0.5 m)
- Absolute accuracy: ±1 hPa (or ±8 m)
- Temperature accuracy: ±0.5 °C.
- Pressure temperature sensitivity: 0.5 Pa/K
3. Results
- in the hardware part:
- in the software part:
4. Discussion
- -
- in precision positioning systems, the use of pressure sensors without reference pressure measurements, where the required precision of the height estimation is of the order of single centimeters, seems to be unjustified,
- -
- in precision positioning systems using Kalman methods, which integrate measurements from various types of sensors, e.g., pressure, acceleration, magnetometers, the presence of reference pressure sensors will contribute to the system to improve height estimations,
- -
- the use of additional reference pressure sensors with a known location allows one to significantly reduce the impact of momentary local pressure fluctuations, and as a result, height measurements can be carried out with an accuracy of the order of single centimeters,
- -
- the use of pressure measurements with reference sensors in complex multi-sensor systems, in which pressure-based height measurements are one of several integrated methods of height measurement, will allow one to increase the precision of height estimations (The analysis and evaluation of precision improvement in such systems will be the subject of further research by the authors.),
- -
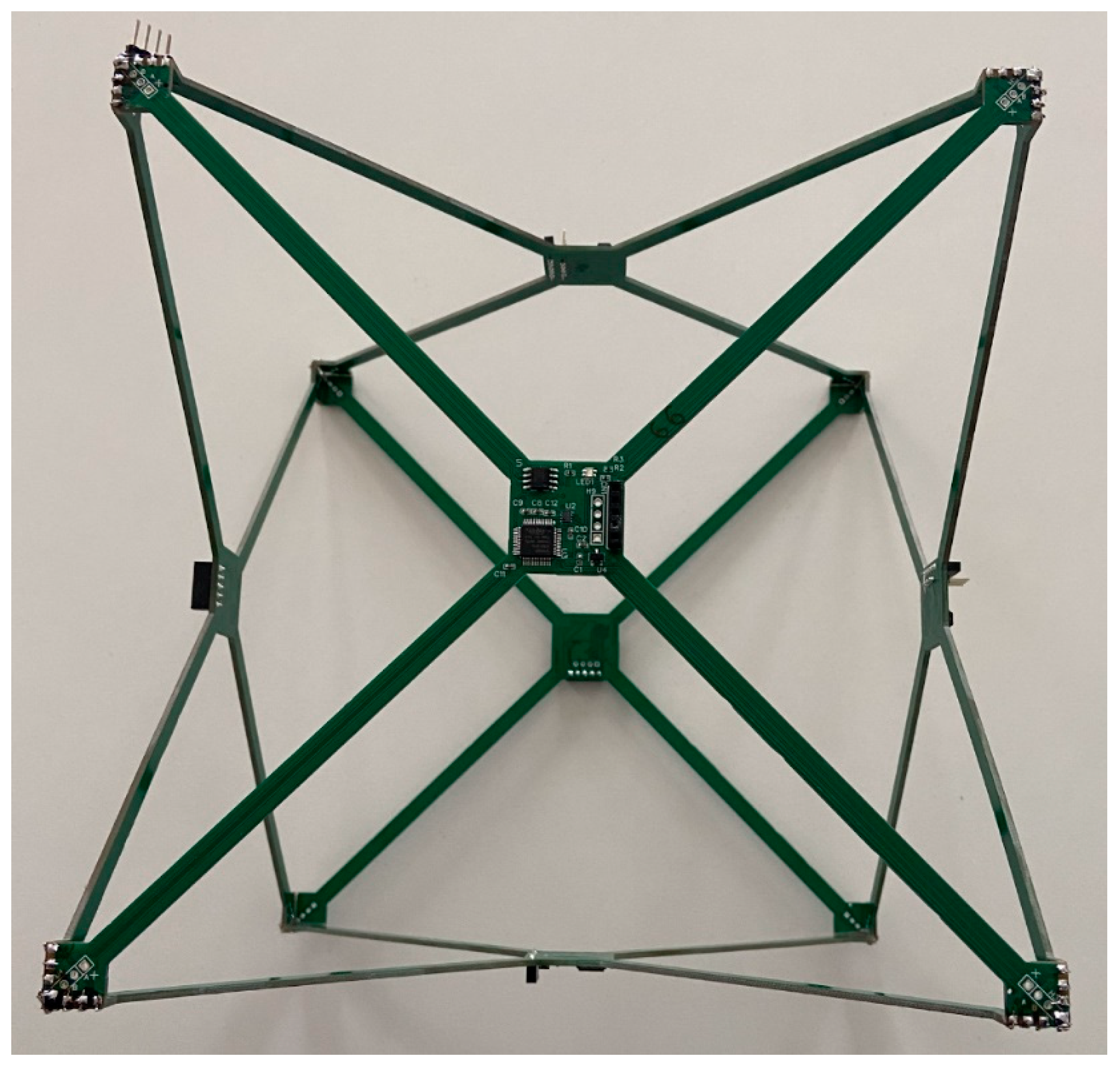
- the use of an array of pressure measurement sensors in a geometric arrangement with different spatial orientations of the sensors (The paper proposes the author’s arrangement of a cube with sensors placed at the intersection of the diagonal squares of each side of the cube) compensates for local pressure differences in the form of crosswind gusts, which is important for practical industrial applications of the system,
- -
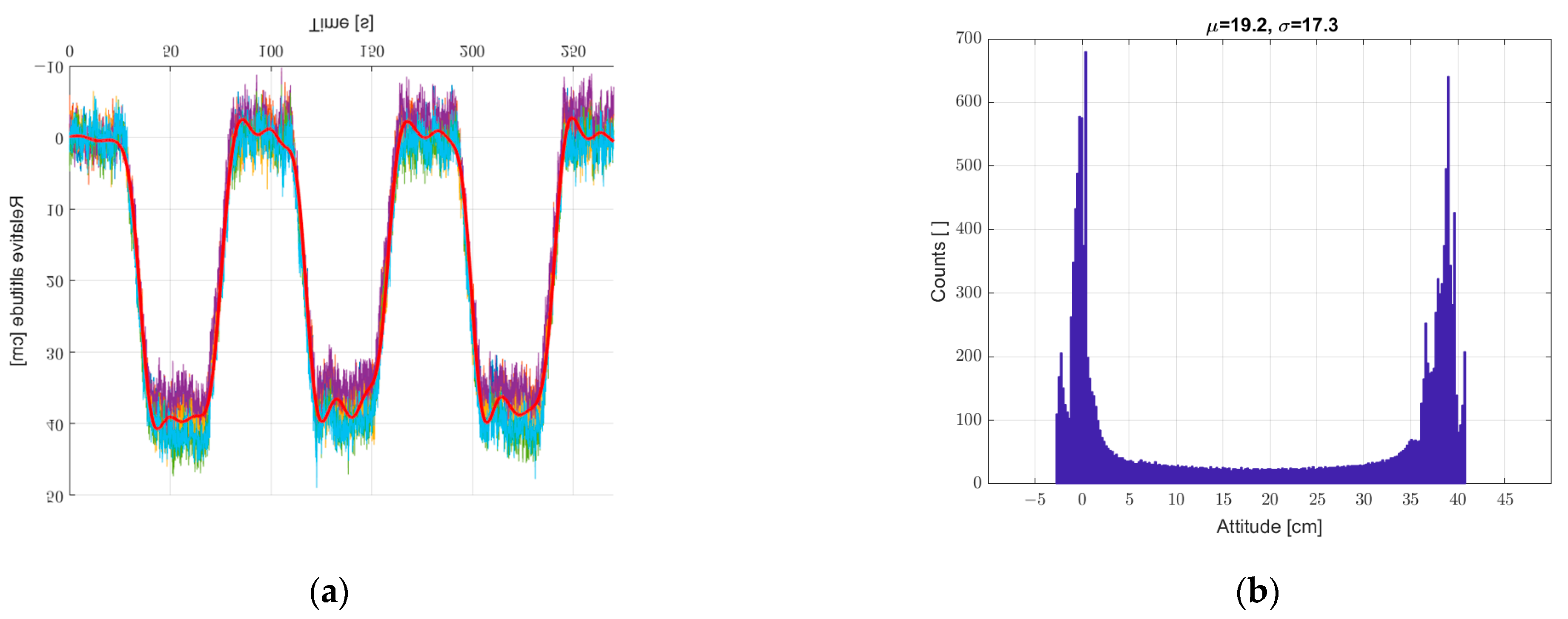
- in the presented study, despite the use of a reference sensor, fast-variable height fluctuations (noise) and a long-term trend (an apparent shift in the average value with a static sensor array) are still observed, as well as a constant height estimation error of several centimeters,
- -
- the fast-varying height fluctuations (noise) are probably caused by several phenomena: measurement noise of sensors, local fast-varying waves of pressure fluctuations in the infrasound region in combination with delays in pressure registration in moving and reference sensors (pressure measurements take place sequentially),
- -
- the observed long-term trend observed in the form of a shift in the average value with static measurements is probably caused by the measurement instability of the sensors themselves, which in turn may be largely due to temperature fluctuations of the individual sensor system,
- -
- the observed constant height estimation error of several centimeters is probably caused by the nonlinearity of the processing of pressure measurement sensors. The sensor DPS310 is a calibrated sensor and contains seven calibration coefficients. These were used in the application to compensate for sensor nonlinearities in the measurement results. The absolute pressure accuracy from the sensor specification is +/−6 Pa in the range of Ta = 20 + 60 °C.
- -
- minimizing, if possible, the distance between the pressure sensors, which are placed on the moving object and the reference sensors. We think that the selection of optimal distances between sensors can be the subject of future studies,
- -
- stabilizing the thermal operation of individual sensors (results are subject to thermal drift of sensors),
- -
- increasing the number of pressure measurement sensors on the moving object and reference sensors,
- -
- the use of differentiation in the spatial orientation of sensors in addition to that already used,
- -
- software linearization through physical multi-point height measurements for each individual sensor used,
- -
- use of sensors with the highest possible precision and stability of measurements, assuming a given budget for the sensor part of the system under construction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, C.; Shin, Y. Deep Learning-Based Multifloor Indoor Tracking Scheme Using Smartphone Sensors. IEEE Access 2022, 10, 63049–63062. [Google Scholar] [CrossRef]
- Davidson, P.; Virekunnas, H.; Sharma, D.; Piché, R.; Cronin, N. Continuous analysis of running mechanics by means of an integrated INS/GPS device. Sensors 2019, 19, 1480. [Google Scholar] [CrossRef] [PubMed]
- Manivannan, A.; Willemse, E.J.; Chin, W.C.B.; Zhou, Y.; Tunçer, B.; Barrat, A.; Bouffanais, R. A Framework for the Identification of Human Vertical Displacement Activity Based on Multi-Sensor Data. IEEE Sens. J. 2022, 22, 8011–8029. [Google Scholar] [CrossRef]
- Hajiyev, C.; Hacizade, U.; Cilden-Guler, D. Data Fusion for Integrated Baro/GPS Altimeter. In Proceedings of the 2019 9th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 11–14 June 2019; IEEE: New York, NY, USA, 2019; pp. 881–885. [Google Scholar]
- Li, H.; Zhao, Y.; Zhang, X. Research of data fusion algorithm of GPS and Baro-Altimeter. In Proceedings of the 2010 International Conference on Machine Vision and Human-Machine Interface, Kaifeng, China, 24–25 April 2010; IEEE: New York, NY, USA, 2010; Volume 45, pp. 45–47. [Google Scholar]
- Wang, S.; Dong, X.; Liu, G.; Gao, M.; Zhao, W.; Lv, D.; Cao, S. Low-Cost Single-Frequency DGNSS/DBA Combined Positioning Research and Performance Evaluation. Remote Sens. 2022, 14, 586. [Google Scholar] [CrossRef]
- Riba, J.R.; Gómez-Pau, Á.; Moreno-Eguilaz, M. Experimental study of visual corona under aeronautic pressure conditions using low-cost imaging sensors. Sensors 2020, 20, 411. [Google Scholar] [CrossRef] [PubMed]
- Lewicka, O.; Specht, M.; Stateczny, A.; Specht, C.; Dardanelli, G. Integration Data Model of the Bathymetric Monitoring System for Shallow Waterbodies Using UAV and USV Platforms. Remote Sens. 2022, 14, 4075. [Google Scholar] [CrossRef]
- Tan, K. Shape Estimation of a 3D Printed Soft Sensor Using Multi-hypothesis Extended Kalman Filter. IEEE Robot. Autom. Lett. 2022, 7, 8383–8390. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, C.; Li, J.; Yang, S.; Ma, T.; Xu, C.; Gao, F. DIDO: Deep Inertial Quadrotor Dynamical Odometry. arXiv 2022, arXiv:2203.03149. [Google Scholar] [CrossRef]
- Khadim, Q.; Hagh, Y.S.; Pyrhonen, L.; Jaiswal, S.; Zhidchenko, V.; Kurvinen, E.; Sopanen, J.; Mikkola, A.; Handroos, H. State Estimation in a Hydraulically Actuated Log Crane Using Unscented Kalman Filter. IEEE Access 2022, 10, 62863–62878. [Google Scholar] [CrossRef]
- Sun, B.; Zhang, Z.; Liu, S.; Yan, X.; Yang, C. Integrated Navigation Algorithm Based on Multiple Fading Factors Kalman Filter. Sensors 2022, 22, 5081. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Feng, P.; Zhang, J.; Yu, D.; Wu, Z. A Novel Positioning Module and Fusion Algorithm for Unmanned Aerial Vehicle Monitoring. IEEE Sens. J. 2021, 21, 23006–23023. [Google Scholar] [CrossRef]
- Xia, H.; Wang, X.; Qiao, Y.; Jian, J.; Chang, Y. Using multiple barometers to detect the floor location of smart phones with built-in barometric sensors for indoor positioning. Sensors 2015, 15, 7857–7877. [Google Scholar] [CrossRef] [PubMed]
- Son, Y.; Oh, S. A barometer-IMU fusion method for vertical velocity and height estimation. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015; IEEE: New York, NY, USA, 2015; pp. 1–4. [Google Scholar]
- Zihajehzadeh, S.; Lee, T.J.; Lee, J.K.; Hoskinson, R.; Park, E.J. Integration of MEMS inertial and pressure sensors for vertical trajectory determination. IEEE Trans. Instrum. Meas. 2015, 64, 804–814. [Google Scholar] [CrossRef]
- Maynard, M.; Vikas, V. Angular Velocity Estimation Using Non-Coplanar Accelerometer Array. IEEE Sens. J. 2021, 21, 23452–23459. [Google Scholar] [CrossRef]
- Manivannan, A.; Chin, W.C.B.; Barrat, A.; Bouffanais, R. On the challenges and potential of using barometric sensors to track human activity. Sensors 2020, 20, 6786. [Google Scholar] [CrossRef] [PubMed]
- Wada, R.; Takahashi, H. Time response characteristics of a highly sensitive barometric pressure change sensor based on MEMS piezoresistive cantilevers. Jpn. J. Appl. Phys. 2020, 59, 070906. [Google Scholar] [CrossRef]
- Bashir, M.A.; Malik, F.M.; Akbar, Z.A.; Uzair, M. Kalman Filter Based Sensor Fusion for Altitude Estimation of Aerial Vehicle. IOP Conf. Ser. Mater. Sci. Eng. 2020, 853, 012034. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagi, Ł.; Zygarlicki, J.; Hunek, W.P.; Majewski, P.; Młotek, P.; Warmuzek, P.; Witkowski, P.; Zmarzły, D. Improvement of Baro Sensors Matrix for Altitude Estimation. Sensors 2022, 22, 7060. https://doi.org/10.3390/s22187060
Nagi Ł, Zygarlicki J, Hunek WP, Majewski P, Młotek P, Warmuzek P, Witkowski P, Zmarzły D. Improvement of Baro Sensors Matrix for Altitude Estimation. Sensors. 2022; 22(18):7060. https://doi.org/10.3390/s22187060
Chicago/Turabian StyleNagi, Łukasz, Jarosław Zygarlicki, Wojciech P. Hunek, Paweł Majewski, Paweł Młotek, Piotr Warmuzek, Piotr Witkowski, and Dariusz Zmarzły. 2022. "Improvement of Baro Sensors Matrix for Altitude Estimation" Sensors 22, no. 18: 7060. https://doi.org/10.3390/s22187060