Use of High-Resolution Multispectral UAVs to Calculate Projected Ground Area in Corylus avellana L. Tree Orchard


Abstract
:1. Introduction
2. Materials and Methods
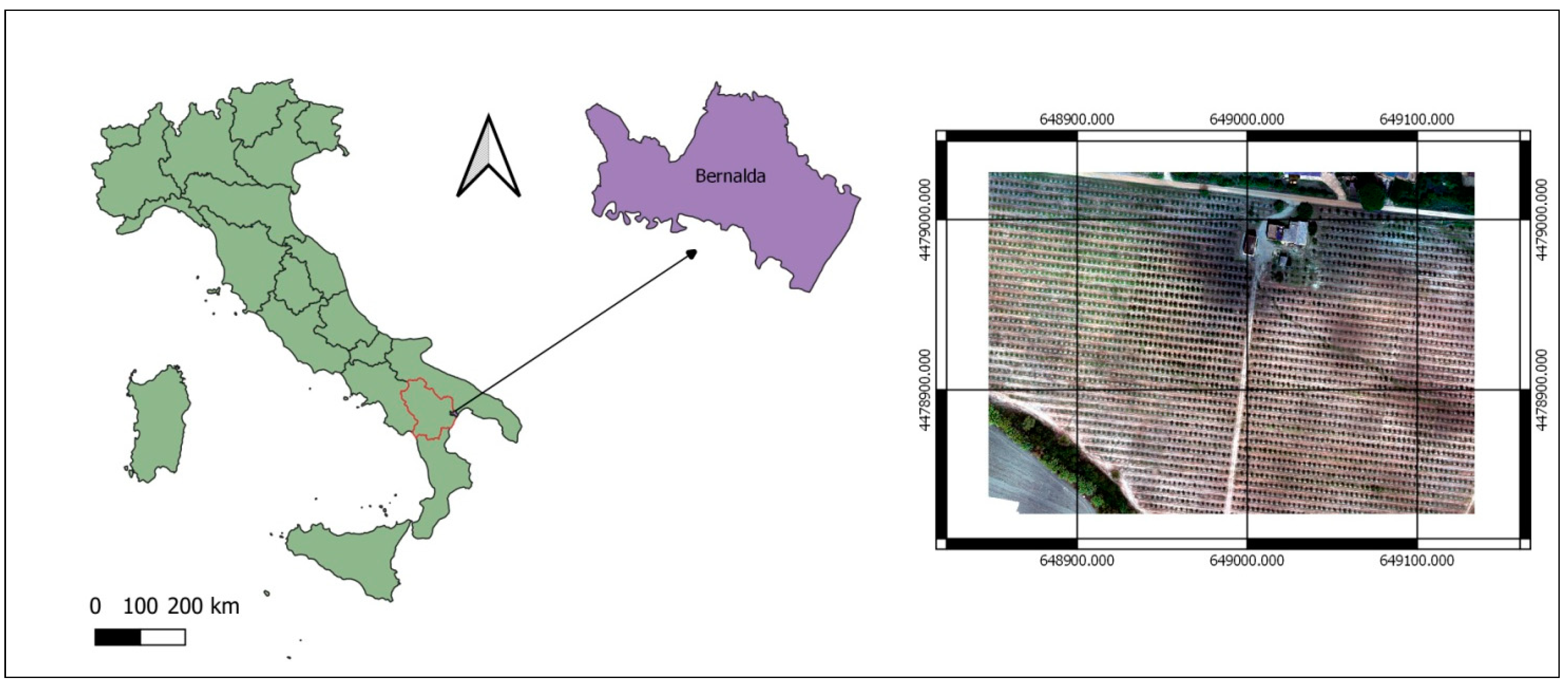
2.1. Experimental Site
2.2. UAV-Based Data Acquisition
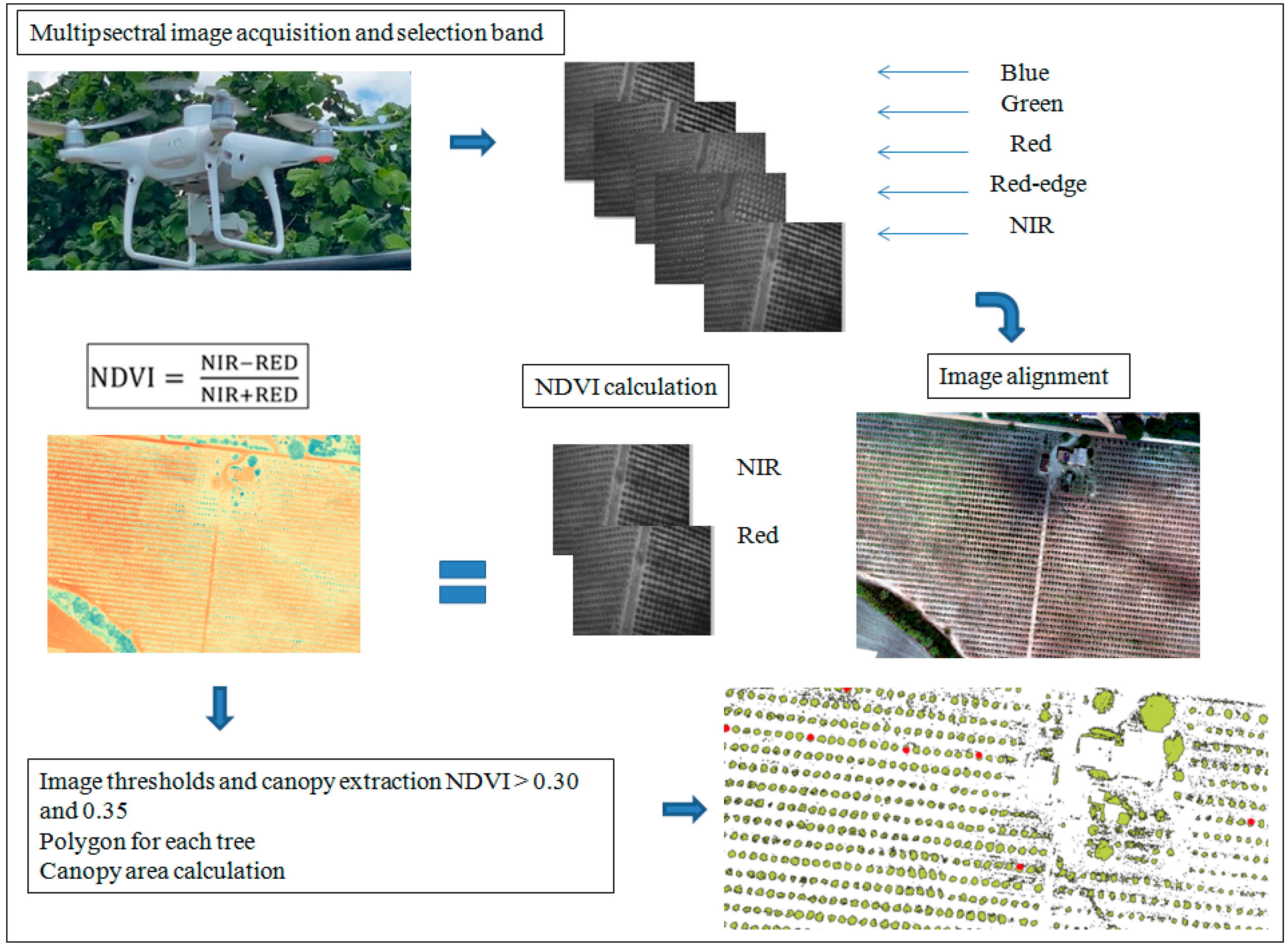
2.3. Image Processing Methods
2.4. Canopy Delimited with NDVI and CHM Methods
2.4.1. NDVI
2.4.2. Canopy Height Model (CHM) Method
2.5. Leaf Area Measurement
2.6. Statistical Analysis
3. Results
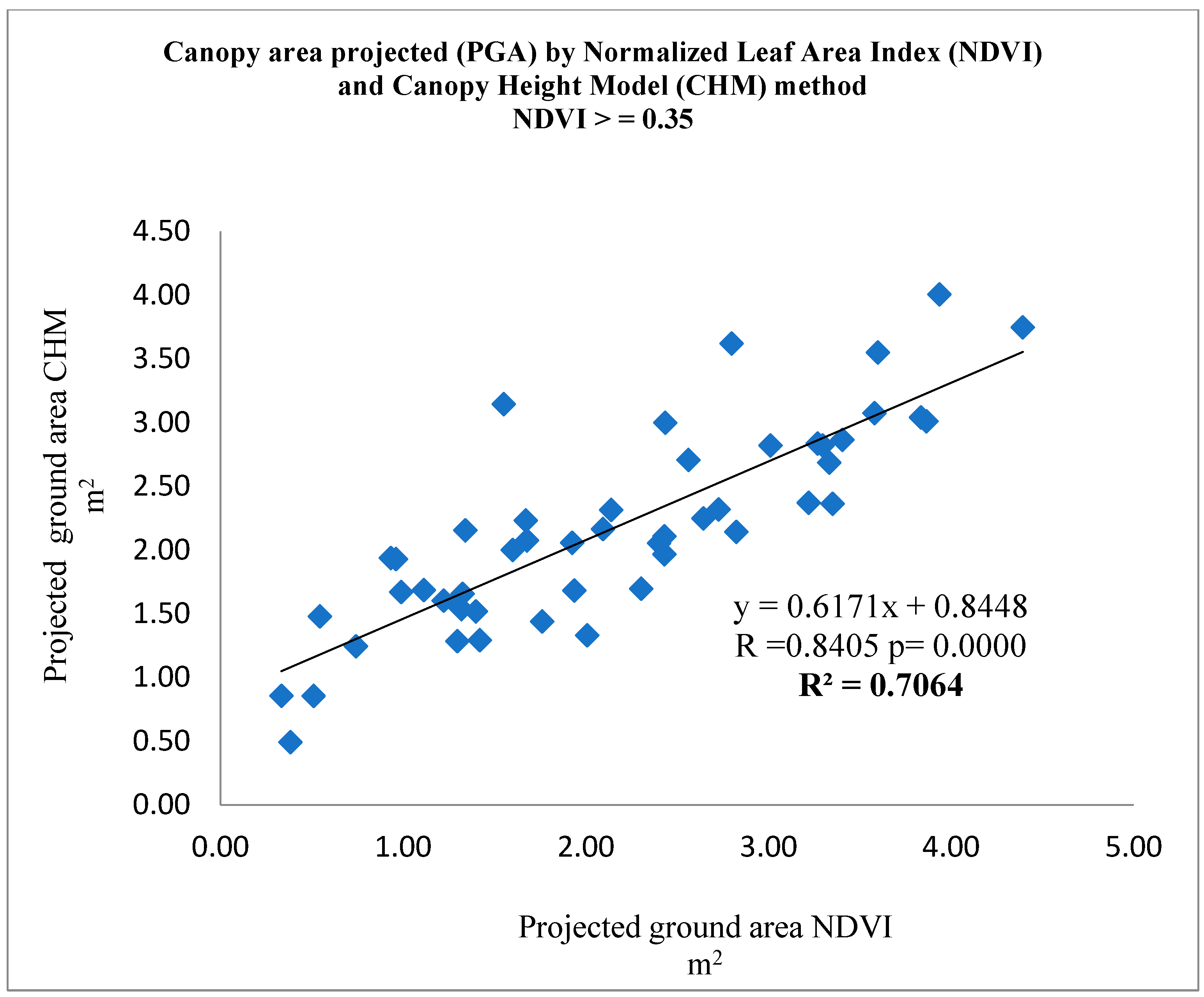
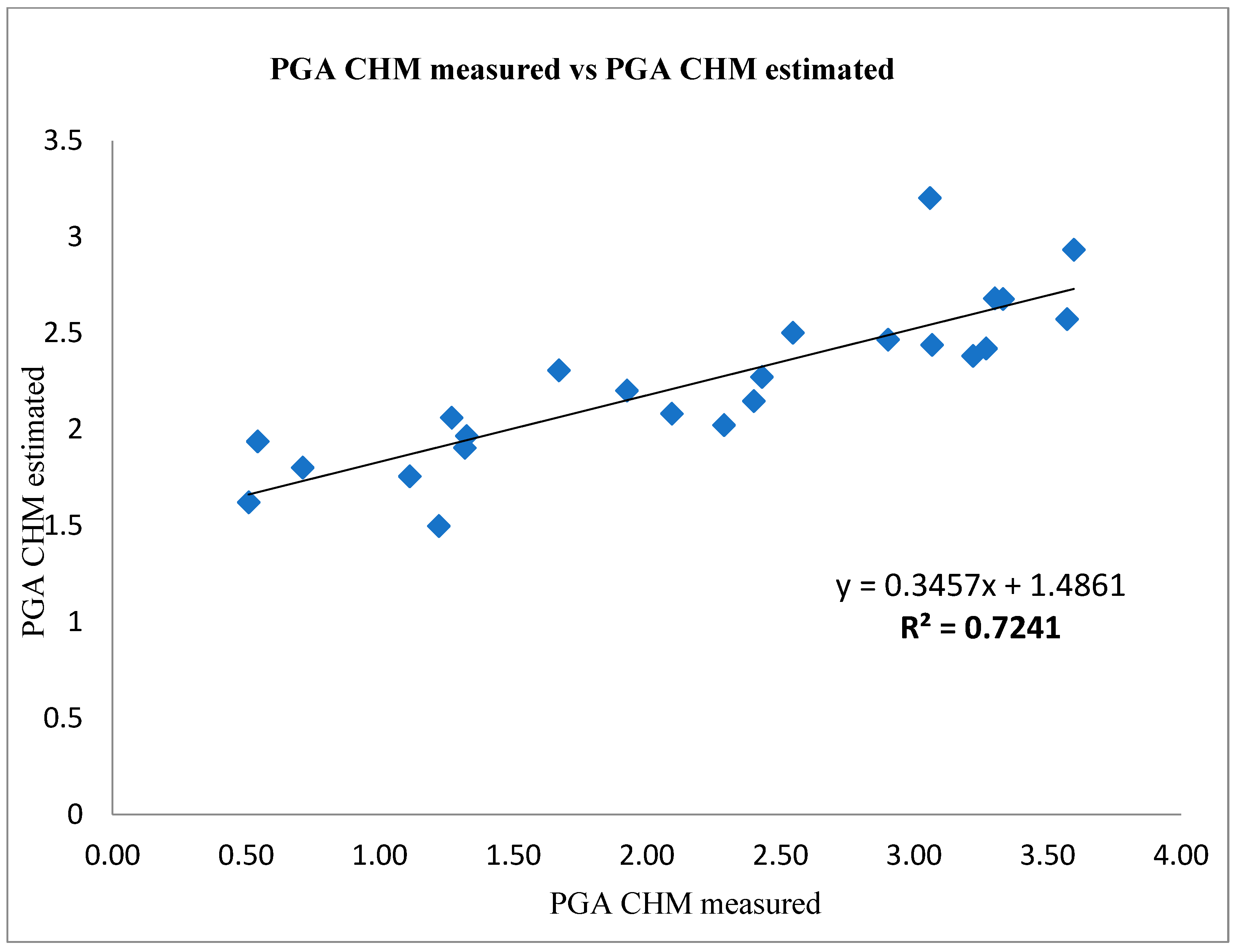
3.1. CHM/NDVI Method
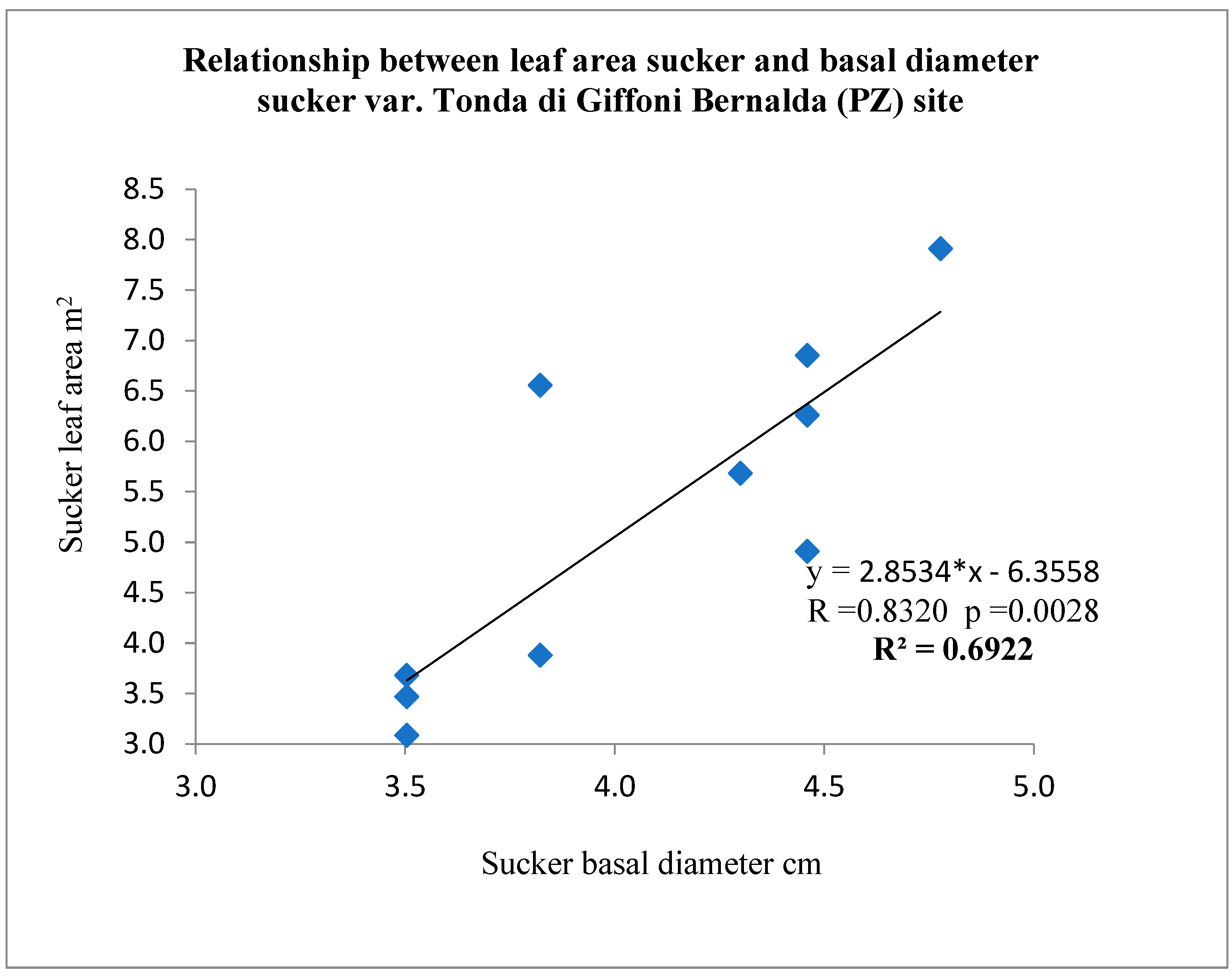
3.2. LAI Measurement
4. Discussion
LAI Measurement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boccacci, P.; Botta, R.; Rovira, M. Genetic diversity of hazelnut (Corylus avellana L.) germplasm in Northeastern Spain. Hortscience 2008, 43, 667–672. [Google Scholar] [CrossRef]
- Helmstetter, A.J.; Oztolan-Erol, N.; Stuart, L.; Buggs, R.J.A. Genetic diversity and domestication of hazelnut (Corylus avellana L.) in Turkey. Plants People Planet 2020, 22, 326–339. [Google Scholar] [CrossRef]
- Usha, K.; Singh, B. Potential applications of remote sensing in horticulture. Sci. Hortic. 2013, 153, 71–83. [Google Scholar] [CrossRef]
- Marques, P.; Pádua, L.; Adão, T.; Hruška, J.; Peres, E.; Sousa, A.; Sousa, J.J. UAV-Based Automatic Detection and Monitoring of Chestnut Trees. Remote Sens. 2019, 11, 855. [Google Scholar] [CrossRef]
- Tombesi, A. Influence of soil water levels on assimilation and water use efficiency in hazelnut. Acta Hortic. 1994, 351, 247–256. [Google Scholar] [CrossRef]
- Cristofori, V.; Muleo, R.; Bignami, C.; Rugini, E. Long term evaluation of hazelnut response to drip irrigation. Acta Hortic. 2014, 1052, 179–185. [Google Scholar] [CrossRef]
- Cramer, W.; Guiot, J.; Fader, M.; Garrabou, J.; Gattuso, J.P.; Iglesias, A. Climate change and interconnected risks to sustainable development in the Mediterranean. Nature Clim. Change 2018, 8, 972–980. [Google Scholar] [CrossRef]
- Bignami, C.; Cammilli, C.; Moretti, G.; Romoli, F. Irrigation of Corylus avellana L. effects on canopy development and production of young plants. Acta Hortic. 2000, 53, 903–910. [Google Scholar] [CrossRef]
- Bignami, C.; Natali, S. Influence of Irrigation on the Growth and Production of Young Hazelnuts. Acta Hortic. 1997, 445, 247–262. [Google Scholar] [CrossRef]
- Thompson, M.M. Hazelnut culture in Oregon, U.S.A. Tree Crops J. 1981, 6, 20–32. [Google Scholar]
- Gioia, D.; Amodio, A.M.; Maggio, A.; Sabia, C.A. Impact of Land Use Changes on the Erosion Processes of a Degraded Rural Landscape: An Analysis Based on High-Resolution DEMs, Historical Images, and Soil Erosion Models. Land 2021, 10, 673. [Google Scholar] [CrossRef]
- Cho, M.A.; Skidmore, A.; Corsi, F.; Wieren, S.E.; Sobhan, I. Estimation of green grass/herb biomass from airborne hyperspectral imagery using spectral indices and partial least squares regression. Int. J. Appl. Earth Obs. Geoinf. 2022, 9, 414–424. [Google Scholar] [CrossRef]
- Cohen, W.; Maiersperger, T.; Gower, S.; Turner, D. An improved strategy for regression of biophysical variables and Landsat ETM+ data. Remote Sens. Environ. 2003, 84, 561–571. [Google Scholar] [CrossRef]
- Hasan, U.; Sawut, M.; Chen, S. Estimating the leaf area index of winter wheat based on unmanned aerial vehicle rgb-image parameters. Sustainability 2019, 11, 6829. [Google Scholar] [CrossRef]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Zhang, C.; Valente, J.; Kooistra, L.; Guo, L.; Wang, W. Orchard management with small unmanned aerial vehicles: A survey of sensing and analysis approaches. Precis. Agric. 2021, 22, 2007–2052. [Google Scholar] [CrossRef]
- Caruso, G.; Zarco-Tejada, P.J.; Gonzalez-Dugo, V.; Moriondo, M.; Tozzini, L.; Palai, G. High-resolution imagery acquired from an unmanned platform to estimate biophysical and geometrical parameters of olive trees under diferent irrigation regimes. PLoS ONE 2015, 14, e0210804. [Google Scholar]
- Torres-Sanchez, J.; Lopez-Granados, F.; Borra-Serrano, I.; Pena, J.M. Assessing UAV-collected image overlap infuence on computation time and digital surface model accuracy in olive orchards. Precis. Agric. 2018, 19, 115–133. [Google Scholar] [CrossRef]
- Handique, B.K.; Khan, A.Q.; Goswami, C.; Prashnani, M.; Gupta, C.; Raju, P.L.N. Crop discrimination using multispectral sensor onboard unmanned aerial vehicle. Proc. Natl. Acad. Sci. India Sect. A-Phys. Sci. 2017, 87, 713–719. [Google Scholar] [CrossRef]
- Raparelli, E.; Lolletti, D. Research, Innovation and Development on Corylus avellana through the Bibliometric Approach. Int. J. Fruit Sci. 2020, 20, S1280–S1296. [Google Scholar] [CrossRef]
- Díaz-Varela, R.; De La Rosa, R.; León, L.; Zarco-Tejada, P. High-resolution airborne UAV imagery to assess olive tree crown parameters using 3D photo reconstruction application in breeding trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef]
- Ok, A.O.; Ozdarici, A. 2-D delineation of individual citrus trees from UAV-based dense photogrammetric surface models. Int. J. Digit. Earth 2018, 11, 583–608. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Tenreiro, T.R.; Garcìa-Vila, M.; Gòmez, J.A.; Jiménez-Berni, J.A.; Fereres, E. Using NDVI for the assessment of canopy cover in agricultural crops within modelling research. Comput. Electron. Agric. 2021, 182, 106038. [Google Scholar] [CrossRef]
- Caruso, G.; Palai, G.; Marra, F.P.; Caruso, T. High-Resolution UAV imagery for Field Olive (Olea europaea L.) Phenotyphing. Horticulture 2021, 7, 258. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. In Third Earth Resources Technology Satellite–1 Syposium, Volume I: Technical Presentations, NASA SP-351; NASA: Washington, DC, USA, 1974; pp. 309–317. [Google Scholar]
- Mu, Y.; Fujii, Y.; Takata, D.; Zheng, B.; Noshita, K.; Honda, K.; Ninomiya, S.; Guo, W. Characterization of peach tree crown by using high-resolution images from an unmanned aerial vehicle. Hortic. Res. 2018, 5, 74. [Google Scholar] [CrossRef] [PubMed]
- Patrick, A.; Li, C. High throughput phenotyping of blueberry bush morphological traits using unmanned aerial systems. Remote Sens. 2017, 9, 1250. [Google Scholar] [CrossRef]
- Farinelli, D.; Boco, D.; Tombesi, A. Influence of Canopy Density on Fruit Growth and Flower Formation. Acta Hortic. 2005, 686, 247–252. [Google Scholar] [CrossRef]
- Pisetta, M. Relazioni Idriche in Nocciolo (Corylus avellana L.). Ph.D. Thesis, University of Padova, Padua, Italy, 2011. Available online: https://www.research.unipd.it/handle/11577/3425450 (accessed on 8 January 2011).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Row-No.Tree (ID Plant) | Leaves per Sucker | Average Leaf Area | Sucker Leaf Area | Mean Ø Sucker per Plant | Total Canopy Area of Single Tree | Projected Ground Area from CHM | LAI |
|---|---|---|---|---|---|---|---|
| n. | (cm2) | (m2) | (cm) | (m2) | (m2) | ||
| 2-17 | 1179 | 53.10 | 6.26 | 4.62 | 27.32 | 3.50 | 7.80 |
| 11-3 | 1016 | 48.34 | 4.91 | 4.34 | 24.12 | 3.30 | 7.31 |
| 12-45 | 1375 | 49.84 | 6.85 | 4.86 | 30.06 | 2.00 | 15.03 |
| 15-14 | 729 | 47.58 | 3.47 | 2.79 | 12.72 | 1.61 | 7.88 |
| 17-6 | 1360 | 48.22 | 6.56 | 4.26 | 23.20 | 2.52 | 9.22 |
| 17-25 | 1307 | 43.49 | 5.68 | 4.58 | 26.86 | 2.85 | 9.43 |
| 27-34 | 798 | 38.67 | 3.09 | 3.62 | 15.89 | 1.82 | 8.73 |
| 34-19 | 753 | 51.52 | 3.88 | 3.86 | 18.63 | 1.16 | 16.01 |
| 6-6 | 720 | 51.12 | 3.68 | 2.51 | 9.52 | 2.12 | 4.48 |
| 17-20 | 1335 | 59.26 | 7.91 | 3.90 | 19.09 | 3.03 | 6.30 |
| Mean | 1057.2 | 49.11 | 5.23 | 3.93 | 20.74 | 2.39 | 9.22 |
| ±δ | 284.8 | 5.51 | 1.66 | 0.78 | 6.72 | 0.77 | 3.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altieri, G.; Maffia, A.; Pastore, V.; Amato, M.; Celano, G. Use of High-Resolution Multispectral UAVs to Calculate Projected Ground Area in Corylus avellana L. Tree Orchard. Sensors 2022, 22, 7103. https://doi.org/10.3390/s22197103
Altieri G, Maffia A, Pastore V, Amato M, Celano G. Use of High-Resolution Multispectral UAVs to Calculate Projected Ground Area in Corylus avellana L. Tree Orchard. Sensors. 2022; 22(19):7103. https://doi.org/10.3390/s22197103
Chicago/Turabian StyleAltieri, Gessica, Angela Maffia, Vittoria Pastore, Mariana Amato, and Giuseppe Celano. 2022. "Use of High-Resolution Multispectral UAVs to Calculate Projected Ground Area in Corylus avellana L. Tree Orchard" Sensors 22, no. 19: 7103. https://doi.org/10.3390/s22197103