
A Partial Ambiguity Resolution Algorithm Based on New-Breadth-First Lattice Search in High-Dimension Situations

Abstract
:1. Introduction
2. RTK Sensor Networks
2.1. Sensor Model
2.2. Ambiguity Resolution
3. Ambiguity Search Algorithm Based on Lattice Theory
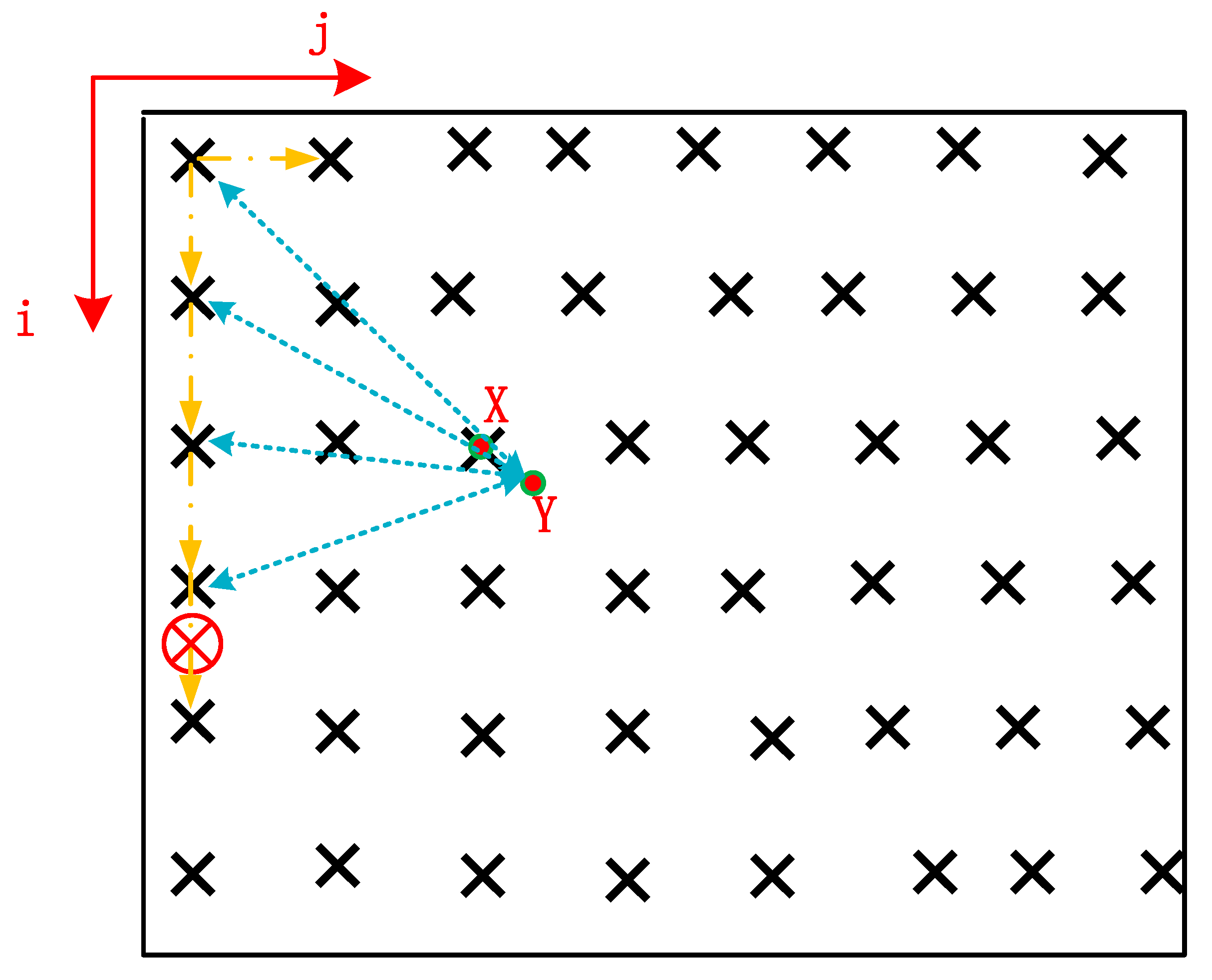
3.1. Transition Relationship
3.2. Ambiguity Estimation
- (1)
- Due to the increase in the satellite altitude angle, the tropospheric delay decreases gradually. Therefore, combined with the partial ambiguity fixing strategy, the satellite cut-off altitude angle is set, and the satellites with altitude angles less than 15° are eliminated to obtain the optimal subset;
- (2)
- Ignoring the constraint of the ambiguity integer, the real ambiguity solution, , and its corresponding covariance matrix, , can be obtained by processing the optimal subset through an extended Kalman filter;
- (3)
- The lattice is related to ambiguity and is constructed based on the covariance matrix. Then, the lattice base, , can be obtained from through the triangular decomposition of the covariance matrix, and the target vector, , is established. From then on, the ambiguity search can be transformed into the search of lattice and known target vector ;
- (4)
- According to the definition of lattice theory, the main goal of the fixed ambiguity solution is to find the vector on the lattice that can meet the requirements of Equation (12). Since the lattice base, , is known, the solution of the lattice is actually to solve the group of integer coefficient vectors that generate . For the lattice and target vector constructed in the second step, this vector is the unknown ambiguity vector.
3.3. Breadth-First-Based Ambiguity Search Algorithm
4. Partial Ambiguity Resolution Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Teunissen, P.J.G. Success probability of integer GPS abiguity rounding and bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef]
- Chang, X.W.; Yang, X.; Zhou, T. MLAMBDA: A modified LAMBDA method for integer least-squares estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef]
- Hassibi, A.; Boyd, S. Integer parameter estimation in linear models with applications to GPS. IEEE Trans. Signal Processing 1998, 46, 2938–2952. [Google Scholar] [CrossRef]
- Grafarend, E.W. Mixed integer-real valued adjustment (IRA) problems: GPS initial cycle ambiguity resolution by means of the LLL algorithm. GPS Solut. 2000, 4, 31–44. [Google Scholar] [CrossRef]
- Zhou, X. Research on the Application of Lattice Based Protocol in MIMO; Beijing University of Posts and telecommunications: Beijing, China, 2011. [Google Scholar]
- Plantard, T.; Susilo, W.; Win, K.T. A Digital Signature Scheme Based on CVPoo; Springer: Berlin/Heidelberg, Germany, 2008; pp. 288–307. [Google Scholar]
- Weichi, Y. Lattice Protocol Theory and Its Application in Cryptographic Design; Southwest Jiaotong University: Chengdu, China, 2005. [Google Scholar]
- Viterbo, E.; Boutros, J. A Universal Decoding Algorithm for Lattice Codes; Quatorzieme Colloque GRETSI: Juan-Les-Pins, France, 1993; pp. 611–614. [Google Scholar]
- Dai, L.; Wang, J.; Rizos, C.; Han, S. Predicting Atmospheric Biases for Real-Time Ambiguity Resolution in GPS/GLONASS Reference Station Networks. J. Geod. 2003, 76, 617–628. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Yan, K. Application of EKF in GPS navigation and positioning. Mod. Navig. 2013, 4, 41–44. [Google Scholar]
- Han, S. Carrier Phase-Based Long-Range GPS Kinematic Positioning. Ph.D. Thesis, University of New South Wales, Sydney, NSW, Australia, 1997. [Google Scholar]
- Zhao, X.; Wang, Q.; Pan, S. Partial ambiguity fixation and performance analysis of lambda algorithm. Chin. J. Inert. Technol. 2010, 18, 665–669. [Google Scholar]
- Wang, K.; Chen, P.; Teunissen, P. Single-Epoch, Single-Frequency Multi-GNSS L5 RTK under High-Elevation Masking. Sensors 2019, 19, 1066. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Liu, W.; Li, J. Analysis of the influence of reduced correlation on the search efficiency in ambiguity resolution. J. Surv. Mapp. 2015, 44, 481–487. [Google Scholar]
- Zhang, X.; Han, G.; Zhang, D.; Zhang, D.; Yang, L. An Efficient SCMA Codebook Design Based on Lattice Theory for Information-Centric IoT. IEEE Access 2019, 7, 2169–3536. [Google Scholar] [CrossRef]
- Zhao, T.; Jiang, J. Block gram Schmit orthogonalization algorithm and its application. J. Grad. Sch. Chin. Acad. Sci. 2009, 26, 224–228. [Google Scholar]
- Brack, A. Reliable GPS+BDS RTK positioning with partial ambiguity resolution. GPS Solut. 2017, 21, 1083–1092. [Google Scholar] [CrossRef]
- Li, C. Research on the Generation and Release of High-Precision Differential Correction Information in Network Gps/Vrs System; Southwest Jiaotong University: Chengdu, China, 2007. [Google Scholar]
- Zou, L.; Li, Y. Research on search space based on LAMBDA algorithm. Geospat. Inf. 2018, 16, 96–98. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver Model | ublox-m8 |
|---|---|
| Satellite dimension | 30 |
| Data acquisition time | 27 October 2020 9:00–11:30 |
| Data format | RTCM3 |
| Epoch number | 3000 |
| Experiment solution | Static solution |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; You, Z.; Sun, X.; Yuan, L. A Partial Ambiguity Resolution Algorithm Based on New-Breadth-First Lattice Search in High-Dimension Situations. Sensors 2022, 22, 7126. https://doi.org/10.3390/s22197126
Wang S, You Z, Sun X, Yuan L. A Partial Ambiguity Resolution Algorithm Based on New-Breadth-First Lattice Search in High-Dimension Situations. Sensors. 2022; 22(19):7126. https://doi.org/10.3390/s22197126
Chicago/Turabian StyleWang, Shouhua, Zhiqi You, Xiyan Sun, and Libo Yuan. 2022. "A Partial Ambiguity Resolution Algorithm Based on New-Breadth-First Lattice Search in High-Dimension Situations" Sensors 22, no. 19: 7126. https://doi.org/10.3390/s22197126
APA StyleWang, S., You, Z., Sun, X., & Yuan, L. (2022). A Partial Ambiguity Resolution Algorithm Based on New-Breadth-First Lattice Search in High-Dimension Situations. Sensors, 22(19), 7126. https://doi.org/10.3390/s22197126