

Intelligent Reflecting Surface-Based Non-LOS Human Activity Recognition for Next-Generation 6G-Enabled Healthcare System

 ,
,  , , ,
, , ,  and
and 
Abstract
:1. Introduction
- The capacity of the IRS to increase coverage by establishing virtual connections for users with a blocked direct link to the base station is helpful for coverage extension, particularly in mm wave communication, which is severely impacted by blockages.
- An IRS can be placed at the cell edge to increase the required signal strength and minimise interference. Cell edge users suffer from both significant signal attenuation from their serving cell and severe co-channel interference from neighbouring cells.
- The wireless environment can efficiently manage the direction of user channel vectors by using an IRS. For instance, NOMA can be made viable by aligning the channels of two users.
- An IRS can be utilised as a hub for signal reflection to facilitate concurrent low power transmissions and interference reduction for large device-to-device communication.
- Furthermore, artificial multi-path propagation can be created by adding distributed IRSs to the LOS environment. As a result, the attainable rate is increased and spatial multiplexing is feasibly created.
Machine Learning-Driven Intelligent Reflecting Surface
2. Literature Review
3. Software-Defined Radio
- SDR can change its configuration instantly, allowing the universal communication device to adapt to its surroundings. It could be a cordless phone one minute, a mobile phone the next, a wireless internet device the next, and a GPS receiver the next.
- Added functionalities can be rapidly and readily added to SDR. In actuality, the update might be sent wirelessly.
- Talking and listening to numerous channels are both possible on SDR.
- Radios that have never been made before can be created. Cognitive radios, sometimes known as smart radios, can analyse how the RF spectrum is being used in their local area and set themselves up for optimum performance.
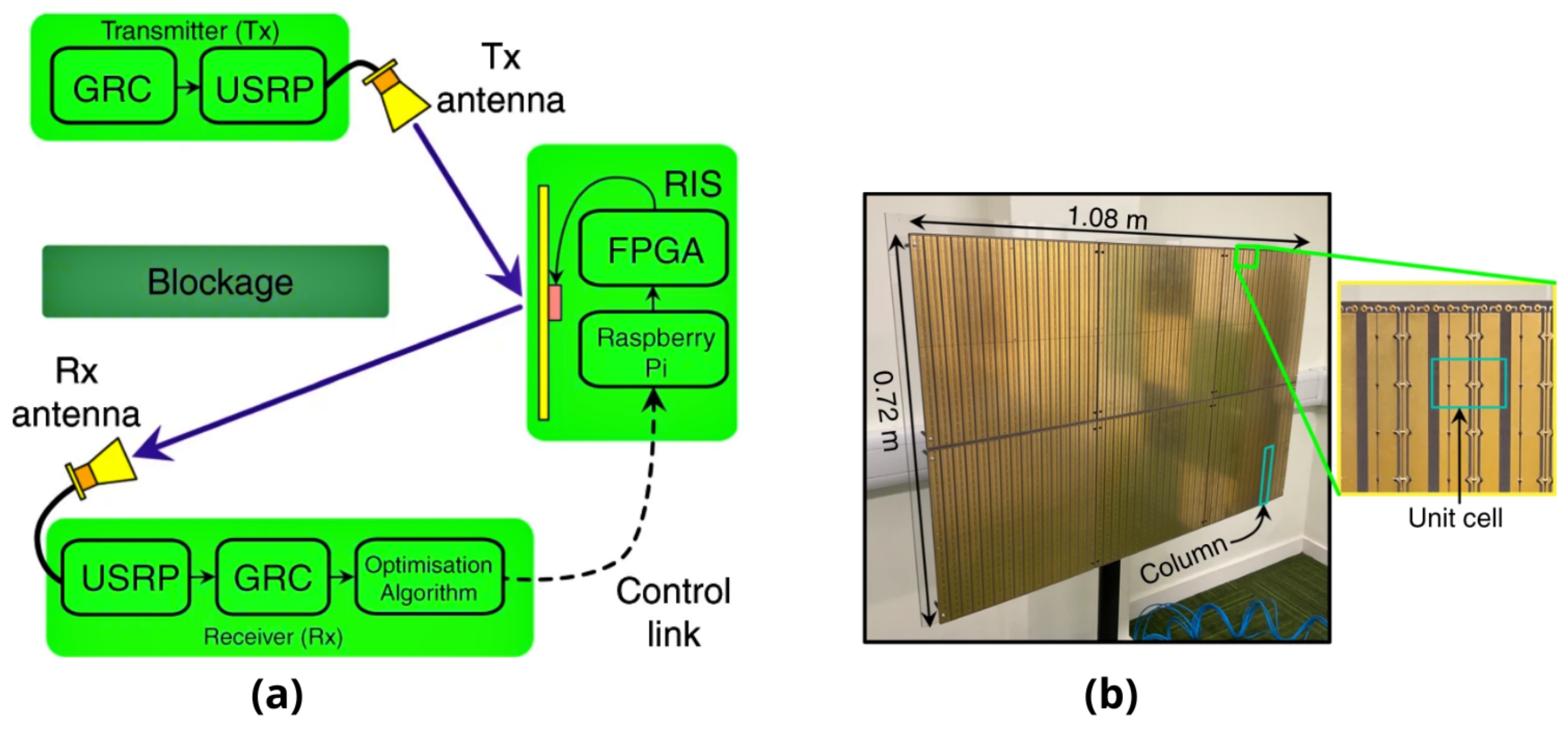
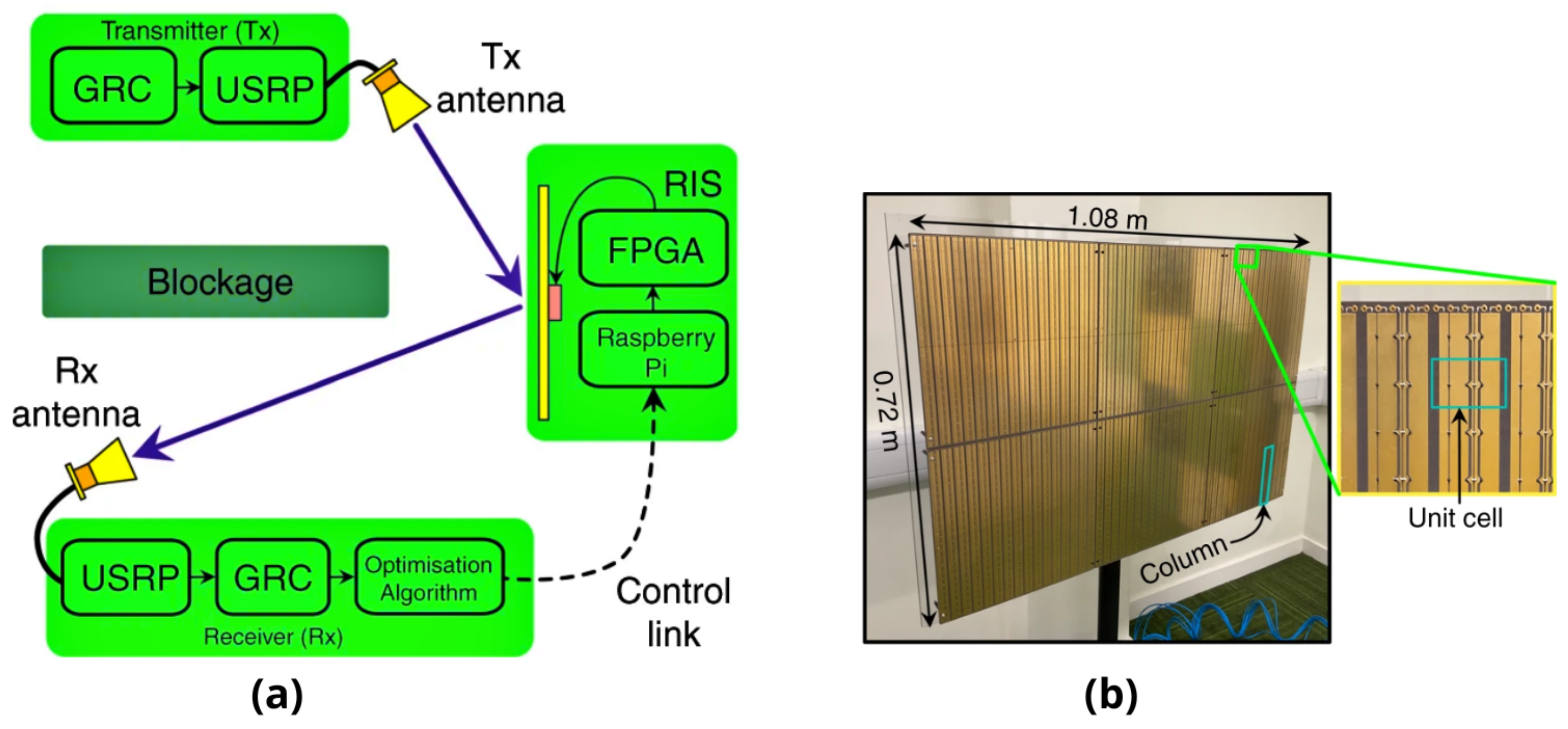
4. Design of IRS-Based Measurement System
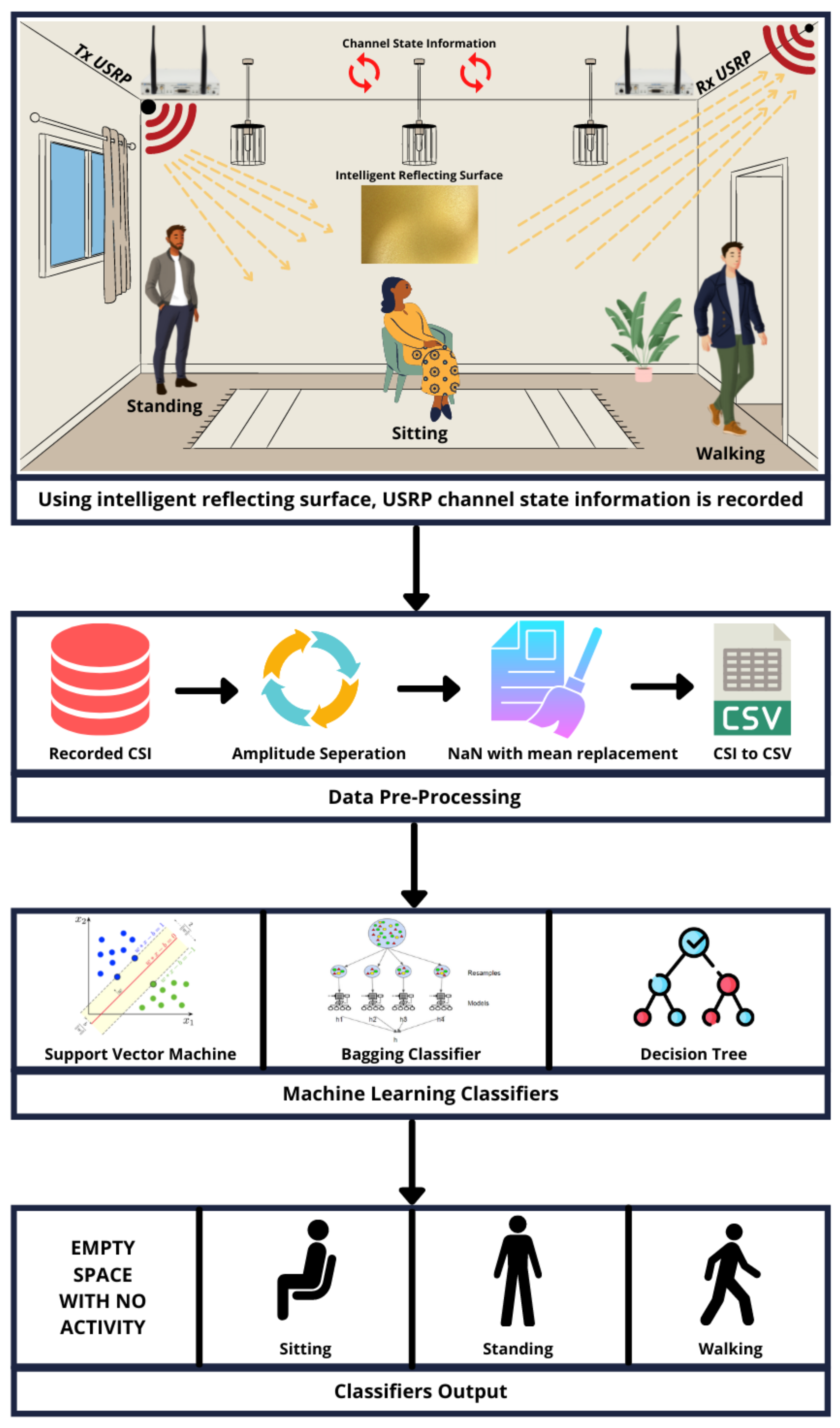
5. Approach
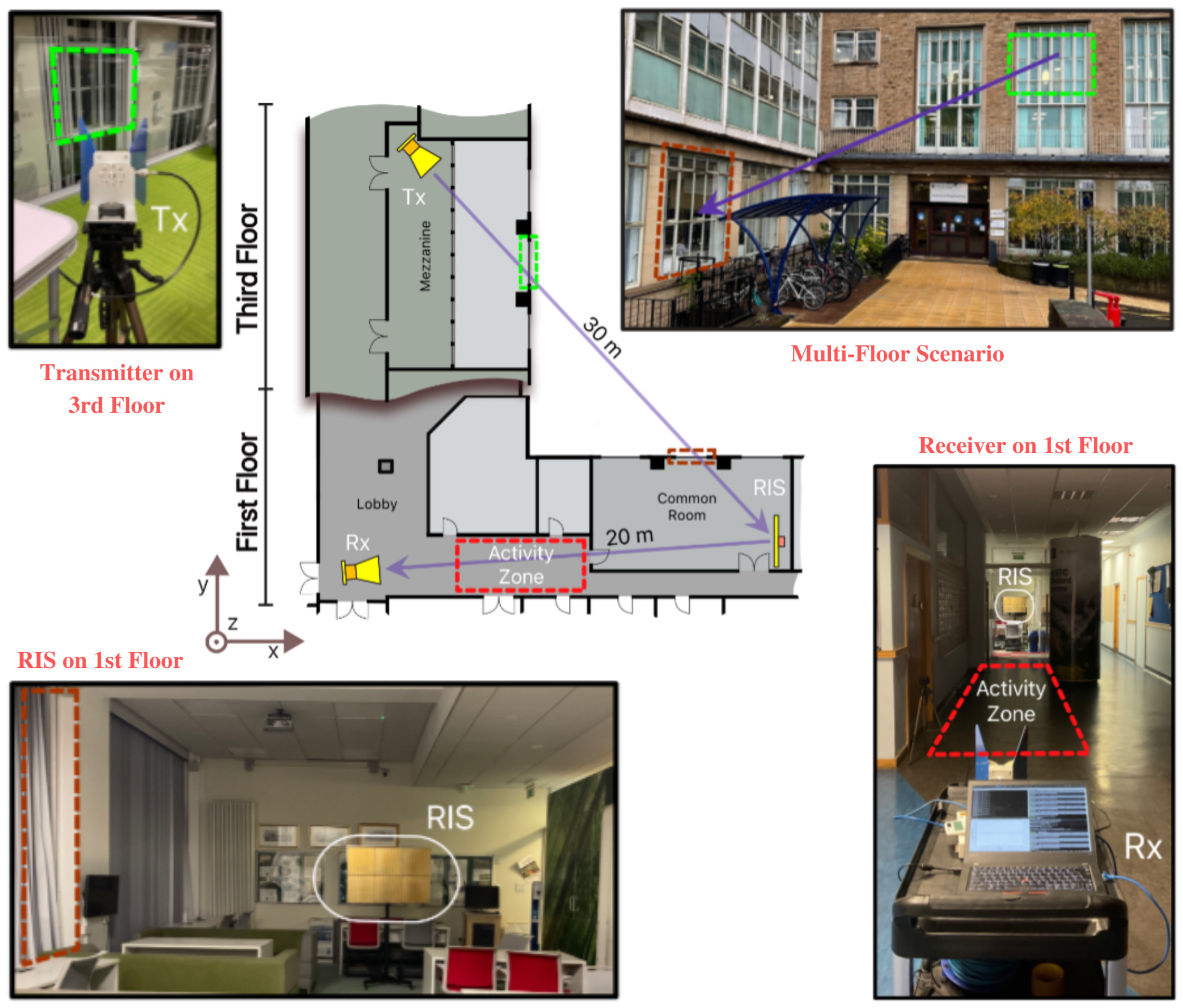
5.1. Data Collection in a Multi-Floor Scenario
5.2. Data Preprocessing and Machine Learning
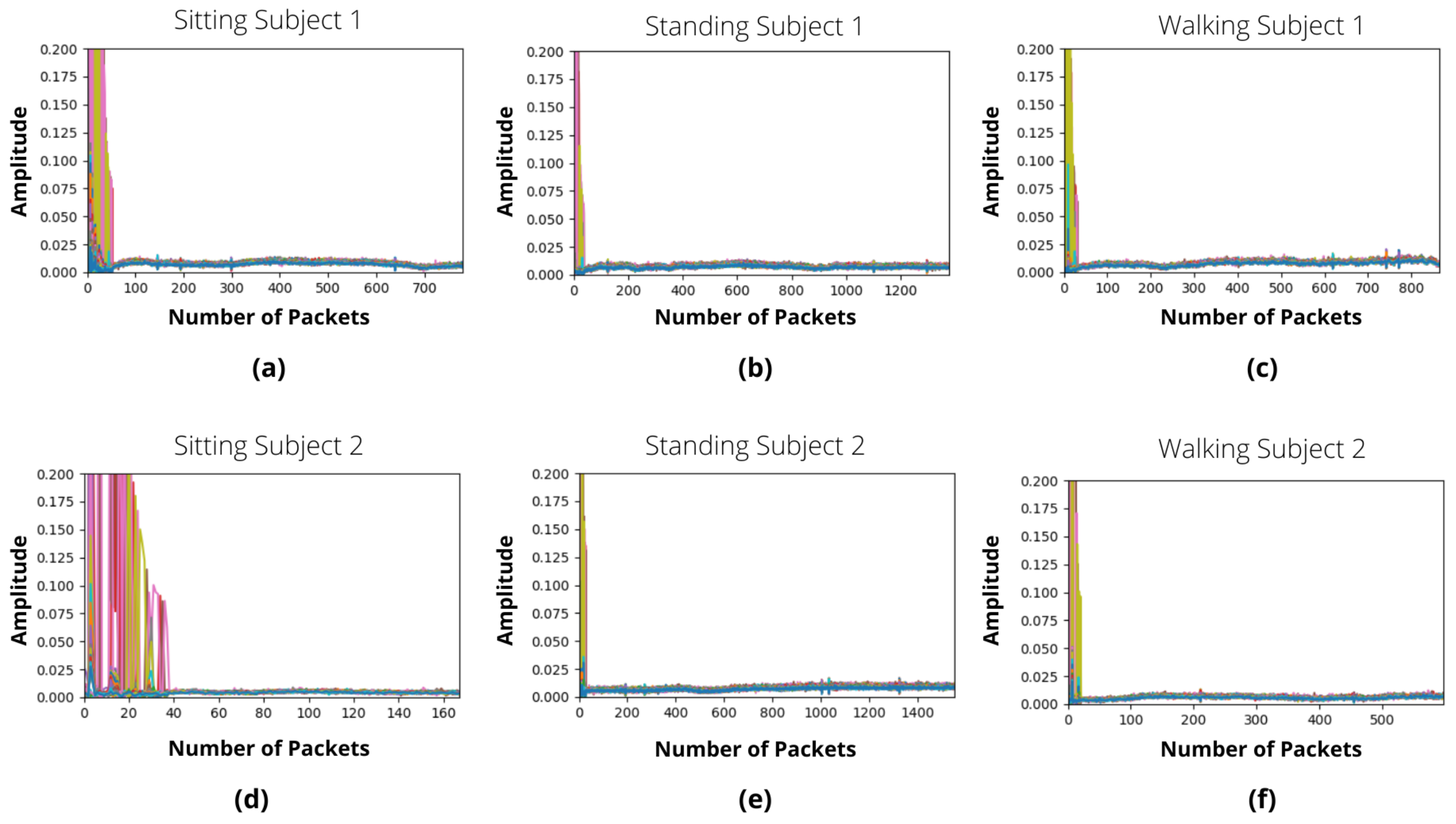
6. Results and Discussion
Challenges
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hong, E.K.; Lee, I.; Shim, B.; Ko, Y.C.; Kim, S.H.; Pack, S.; Lee, K.; Kim, S.; Kim, J.H.; Shin, Y.; et al. 6G R&D vision: Requirements and candidate technologies. J. Commun. Netw. 2022, 24, 232–245. [Google Scholar] [CrossRef]
- Pan, Q.; Wu, J.; Nebhen, J.; Bashir, A.K.; Su, Y.; Li, J. Artificial Intelligence-Based Energy Efficient Communication System for Intelligent Reflecting Surface-Driven VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 1–13. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Wang, K.; Kolb, J.F.; Elkashlan, M.; Chen, M.; Di Renzo, M.; Hao, Y.; Wang, J.; Swindlehurst, A.L.; et al. Reconfigurable intelligent surfaces for 6G systems: Principles, applications, and research directions. IEEE Commun. Mag. 2021, 59, 14–20. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Wang, Y.; Zheng, G.; Chatzinotas, S.; Hu, Y. Refracting RIS aided hybrid satellite-terrestrial relay networks: Joint beamforming design and optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3717–3724. [Google Scholar] [CrossRef]
- Liu, L.; Shah, S.A.; Zhao, G.; Yang, X. Respiration symptoms monitoring in body area networks. Appl. Sci. 2018, 8, 568. [Google Scholar] [CrossRef]
- Sejan, M.A.S.; Rahman, M.H.; Shin, B.S.; Oh, J.H.; You, Y.H.; Song, H.K. Machine Learning for Intelligent-Reflecting-Surface-Based Wireless Communication towards 6G: A Review. Sensors 2022, 22, 5405. [Google Scholar] [CrossRef] [PubMed]
- Shah, S.A.; Yang, X.; Abbasi, Q.H. Cognitive health care system and its application in pill-rolling assessment. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2632. [Google Scholar] [CrossRef]
- Shah, S.A.; Fioranelli, F. RF sensing technologies for assisted daily living in healthcare: A comprehensive review. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 26–44. [Google Scholar] [CrossRef]
- Li, D. How Many Reflecting Elements Are Needed for Energy- and Spectral-Efficient Intelligent Reflecting Surface-Assisted Communication. IEEE Trans. Commun. 2022, 70, 1320–1331. [Google Scholar] [CrossRef]
- Taylor, W.; Shah, S.A.; Dashtipour, K.; Zahid, A.; Abbasi, Q.H.; Imran, M.A. An intelligent non-invasive real-time human activity recognition system for next-generation healthcare. Sensors 2020, 20, 2653. [Google Scholar] [CrossRef]
- Saeed, U.; Shah, S.Y.; Zahid, A.; Ahmad, J.; Imran, M.A.; Abbasi, Q.H.; Shah, S.A. Wireless Channel Modelling for Identifying Six Types of Respiratory Patterns With SDR Sensing and Deep Multilayer Perceptron. IEEE Sens. J. 2021, 21, 20833–20840. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Shah, S.A.; Ren, A.; Zhao, N.; Zhang, Z.; Fan, D.; Zhao, J.; Wang, W.; Ur-Rehman, M. Freezing of Gait Detection Considering Leaky Wave Cable. IEEE Trans. Antennas Propag. 2019, 67, 554–561. [Google Scholar] [CrossRef]
- Yang, X.; Shah, S.A.; Ren, A.; Zhao, N.; Fan, D.; Hu, F.; Ur Rehman, M.; von Deneen, K.M.; Tian, J. Wandering Pattern Sensing at S-Band. IEEE J. Biomed. Health Inform. 2018, 22, 1863–1870. [Google Scholar] [CrossRef]
- Taylor, W.; Abbasi, Q.H.; Dashtipour, K.; Ansari, S.; Shah, S.A.; Khalid, A.; Imran, M.A. A Review of the State of the Art in Non-Contact Sensing for COVID-19. Sensors 2020, 20, 5665. [Google Scholar] [CrossRef] [PubMed]
- Ren, A.; Zahid, A.; Zoha, A.; Shah, S.A.; Imran, M.A.; Alomainy, A.; Abbasi, Q.H. Machine Learning Driven Approach Towards the Quality Assessment of Fresh Fruits Using Non-Invasive Sensing. IEEE Sens. J. 2020, 20, 2075–2083. [Google Scholar] [CrossRef]
- Saeed, U.; Shah, S.Y.; Ahmad, J.; Imran, M.A.; Abbasi, Q.H.; Shah, S.A. Machine learning empowered COVID-19 patient monitoring using non-contact sensing: An extensive review. J. Pharm. Anal. 2022, 12, 193–204. [Google Scholar] [CrossRef] [PubMed]
- Seyfioğlu, M.S.; Özbayoğlu, A.M.; Gürbüz, S.Z. Deep convolutional autoencoder for radar-based classification of similar aided and unaided human activities. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1709–1723. [Google Scholar] [CrossRef]
- Saeed, U.; Shah, S.Y.; Shah, S.A.; Ahmad, J.; Alotaibi, A.A.; Althobaiti, T.; Ramzan, N.; Alomainy, A.; Abbasi, Q.H. Discrete human activity recognition and fall detection by combining FMCW RADAR data of heterogeneous environments for independent assistive living. Electronics 2021, 10, 2237. [Google Scholar] [CrossRef]
- Van Dorp, P.; Groen, F. Feature-based human motion parameter estimation with radar. IET Radar Sonar Navig. 2008, 2, 135–145. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Understanding and modeling of wifi signal based human activity recognition. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 65–76. [Google Scholar]
- Saeed, U.; Shah, S.Y.; Alotaibi, A.A.; Althobaiti, T.; Ramzan, N.; Abbasi, Q.H.; Shah, S.A. Portable UWB RADAR sensing system for transforming subtle chest movement into actionable micro-doppler signatures to extract respiratory rate exploiting ResNet algorithm. IEEE Sens. J. 2021, 21, 23518–23526. [Google Scholar] [CrossRef]
- Du, L.; Li, L.; Wang, B.; Xiao, J. Micro-Doppler feature extraction based on time-frequency spectrogram for ground moving targets classification with low-resolution radar. IEEE Sens. J. 2016, 16, 3756–3763. [Google Scholar] [CrossRef]
- Shah, S.A.; Tahir, A.; Ahmad, J.; Zahid, A.; Pervaiz, H.; Shah, S.Y.; Ashleibta, A.M.A.; Hasanali, A.; Khattak, S.; Abbasi, Q.H. Sensor fusion for identification of freezing of gait episodes using Wi-Fi and radar imaging. IEEE Sens. J. 2020, 20, 14410–14422. [Google Scholar] [CrossRef]
- Zhou, R.; Lu, X.; Zhao, P.; Chen, J. Device-free presence detection and localization with SVM and CSI fingerprinting. IEEE Sens. J. 2017, 17, 7990–7999. [Google Scholar] [CrossRef]
- Xi, W.; Zhao, J.; Li, X.Y.; Zhao, K.; Tang, S.; Liu, X.; Jiang, Z. Electronic frog eye: Counting crowd using WiFi. In Proceedings of the IEEE INFOCOM 2014—IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 361–369. [Google Scholar]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. (CSUR) 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2016, 16, 581–594. [Google Scholar] [CrossRef]
- Wang, G.; Zou, Y.; Zhou, Z.; Wu, K.; Ni, L.M. We can hear you with Wi-Fi! IEEE Trans. Mob. Comput. 2016, 15, 2907–2920. [Google Scholar] [CrossRef]
- Ali, K.; Liu, A.X.; Wang, W.; Shahzad, M. Keystroke recognition using wifi signals. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 90–102. [Google Scholar]
- Liu, J.; Chen, Y.; Wang, Y.; Chen, X.; Cheng, J.; Yang, J. Monitoring vital signs and postures during sleep using WiFi signals. IEEE Internet Things J. 2018, 5, 2071–2084. [Google Scholar] [CrossRef]
- Gao, Q.; Tong, J.; Wang, J.; Ran, Z.; Pan, M. Device-free multi-person respiration monitoring using WiFi. IEEE Trans. Veh. Technol. 2020, 69, 14083–14087. [Google Scholar] [CrossRef]
- Gu, Y.; Ren, F.; Li, J. Paws: Passive human activity recognition based on wifi ambient signals. IEEE Internet Things J. 2015, 3, 796–805. [Google Scholar] [CrossRef]
- Sigg, S.; Scholz, M.; Shi, S.; Ji, Y.; Beigl, M. RF-sensing of activities from non-cooperative subjects in device-free recognition systems using ambient and local signals. IEEE Trans. Mob. Comput. 2013, 13, 907–920. [Google Scholar] [CrossRef]
- Zhang, T.; Song, T.; Chen, D.; Zhang, T.; Zhuang, J. WiGrus: A WiFi-based gesture recognition system using software-defined radio. IEEE Access 2019, 7, 131102–131113. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-free human activity recognition using commercial WiFi devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Ashleibta, A.M.; Abbasi, Q.H.; Shah, S.A.; Khalid, M.A.; AbuAli, N.A.; Imran, M.A. Non-invasive RF sensing for detecting breathing abnormalities using software defined radios. IEEE Sens. J. 2020, 21, 5111–5118. [Google Scholar] [CrossRef]
- Fitzek, F.H.; Seeling, P.; Höschele, T.; Jacobfeuerborn, B. On the need of computing in future communication networks. In Computing in Communication Networks; Elsevier: Amsterdam, The Netherlands, 2020; pp. 3–45. [Google Scholar]
- Garg, V. Wireless Communications & Networking; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Usman, M.; Rains, J.; Khan, M.Z.; Kazim, J.U.R.; Imran, M.; Abbasi, Q.H. Intelligent wireless walls for contactless in-home monitoring. Light Sci. Appl. 2022, 11, 212. [Google Scholar] [CrossRef]
- Usman, M.; Rains, J.; Khan, M.Z.; Kazim, J.U.R.; Imran, M.; Abbasi, Q.H. Intelligent Wireless Walls for Contactless In-Home Monitoring. 2022. Available online: https://researchdata.gla.ac.uk/1281/ (accessed on 15 July 2022).
- Ahmad, Z.; Rai, A.; Maliuk, A.S.; Kim, J.M. Discriminant feature extraction for centrifugal pump fault diagnosis. IEEE Access 2020, 8, 165512–165528. [Google Scholar] [CrossRef]
- Saeed, U.; Jan, S.U.; Lee, Y.D.; Koo, I. Fault diagnosis based on extremely randomized trees in wireless sensor networks. Reliab. Eng. Syst. Saf. 2021, 205, 107284. [Google Scholar] [CrossRef]
- Jan, S.U.; Lee, Y.D.; Shin, J.; Koo, I. Sensor fault classification based on support vector machine and statistical time-domain features. IEEE Access 2017, 5, 8682–8690. [Google Scholar] [CrossRef]
- Pan, G.; Ye, J.; An, J.; Alouini, M.S. Full-duplex enabled intelligent reflecting surface systems: Opportunities and challenges. IEEE Wirel. Commun. 2021, 28, 122–129. [Google Scholar] [CrossRef]
- Dardari, D. Communicating with large intelligent surfaces: Fundamental limits and models. IEEE J. Sel. Areas Commun. 2020, 38, 2526–2537. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent reflecting surface-aided wireless communications: A tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Periodicity, | Patch-Width, | Patch-Spacing, | Substrate Thickness, h |
|---|---|---|---|---|
| Dimensions in mm | 22.5; 15.0 | 6.0; 0.9; 0.5; 6.0; 2.9 | 0.9; 0.4; 1.0; 0.4 | 5.0 |
| Parameter | Value |
|---|---|
| OFDM Subcarrier | 64 Carriers |
| Bit Per Symbol | 2 Bits |
| Pilot Subcarrier | 4 |
| Devices Used | USRP X300/USRP X310 |
| Channel Mapping | 1 Tx, 2 Rx |
| Central Frequency | 3.75 GHz |
| Data Type | Int16 |
| Gain (dB) | Tx 10, Rx 2 |
| Classifier | IRS-OFF Scenario | IRS-ON Scenario | ||
|---|---|---|---|---|
| Training Time | Accuracy | Training Time | Accuracy | |
| Support Vector Machine | 0.060 s | 0.075 s | ||
| Bagging | 809.76 s | 607.79 s | ||
| Decision Tree | 0.140 s | 0.212 s | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, U.; Shah, S.A.; Khan, M.Z.; Alotaibi, A.A.; Althobaiti, T.; Ramzan, N.; Abbasi, Q.H. Intelligent Reflecting Surface-Based Non-LOS Human Activity Recognition for Next-Generation 6G-Enabled Healthcare System. Sensors 2022, 22, 7175. https://doi.org/10.3390/s22197175
Saeed U, Shah SA, Khan MZ, Alotaibi AA, Althobaiti T, Ramzan N, Abbasi QH. Intelligent Reflecting Surface-Based Non-LOS Human Activity Recognition for Next-Generation 6G-Enabled Healthcare System. Sensors. 2022; 22(19):7175. https://doi.org/10.3390/s22197175
Chicago/Turabian StyleSaeed, Umer, Syed Aziz Shah, Muhammad Zakir Khan, Abdullah Alhumaidi Alotaibi, Turke Althobaiti, Naeem Ramzan, and Qammer H. Abbasi. 2022. "Intelligent Reflecting Surface-Based Non-LOS Human Activity Recognition for Next-Generation 6G-Enabled Healthcare System" Sensors 22, no. 19: 7175. https://doi.org/10.3390/s22197175
APA StyleSaeed, U., Shah, S. A., Khan, M. Z., Alotaibi, A. A., Althobaiti, T., Ramzan, N., & Abbasi, Q. H. (2022). Intelligent Reflecting Surface-Based Non-LOS Human Activity Recognition for Next-Generation 6G-Enabled Healthcare System. Sensors, 22(19), 7175. https://doi.org/10.3390/s22197175