

Smartphone-Based Social Distance Detection Technology with Near-Ultrasonic Signal

 ,
,
Abstract
:1. Introduction
- Firstly, a high-precision smartphone-based social distance detection technology with a near-ultrasonic signal is proposed;
- Secondly, combined with short-distance crowd channel characteristics, a group of 18 kHz–23 kHz Chirp signals with single frequency signals are designed and optimized to support ranging and coding;
- Thirdly, a precise mutual ranging algorithm is performed by using the cubic spline interpolation and two-stage search to obtain the robust mutual ranging results against multipath and NLoS affect. Both realize social distance detection with a high refresh rate and high accuracy;
- Additionally, combined with Chirp BOK, FDMA, and CSMA/CA, a hybrid channel access protocol is proposed. The simulation based on measured parameters verifies the protocol can increase the number of concurrencies and reduce the probability of collision;
- Furthermore, a considerable amount of experiments of several scenarios are carried out and demonstrate the robustness and the feasibility of this system;
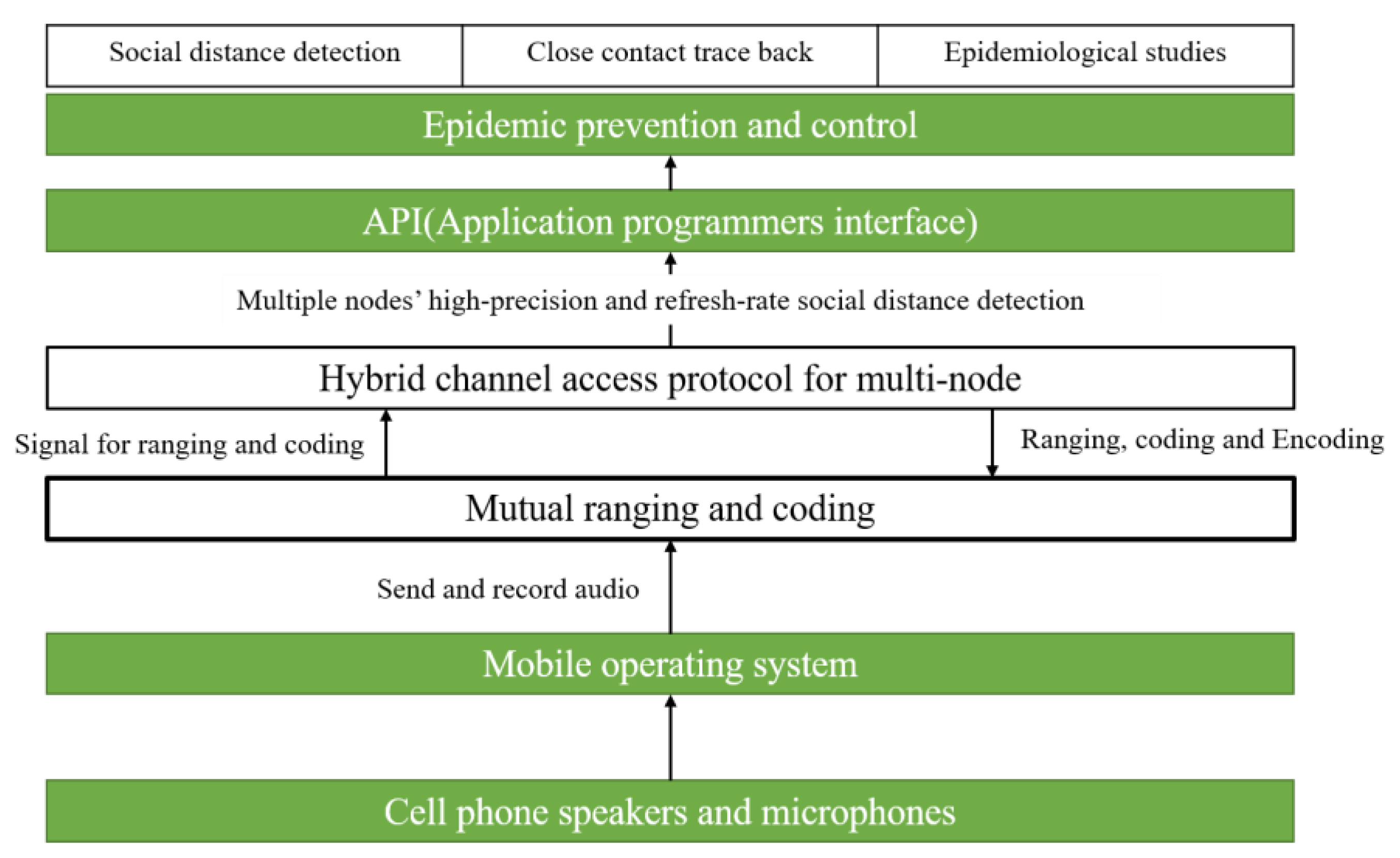
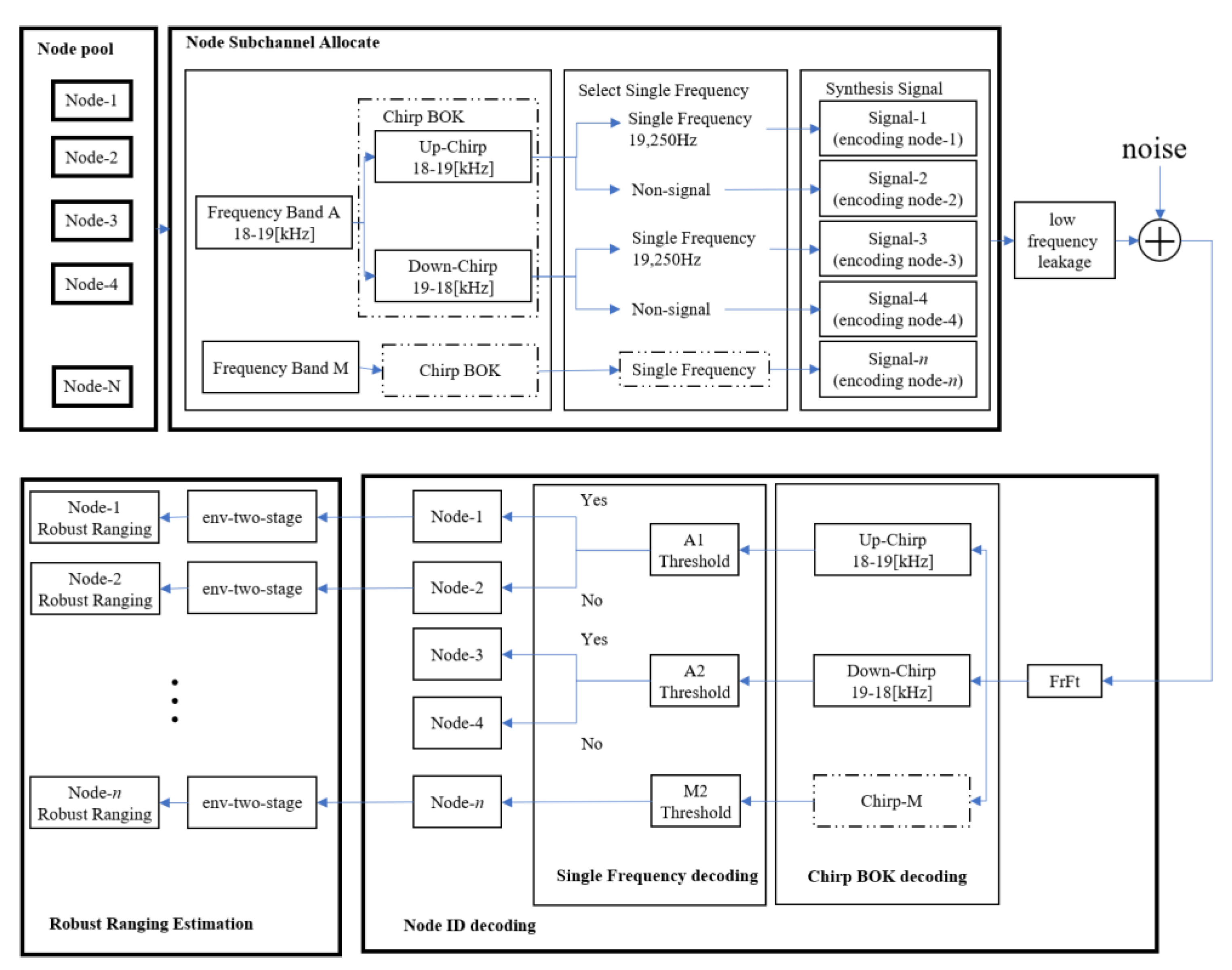
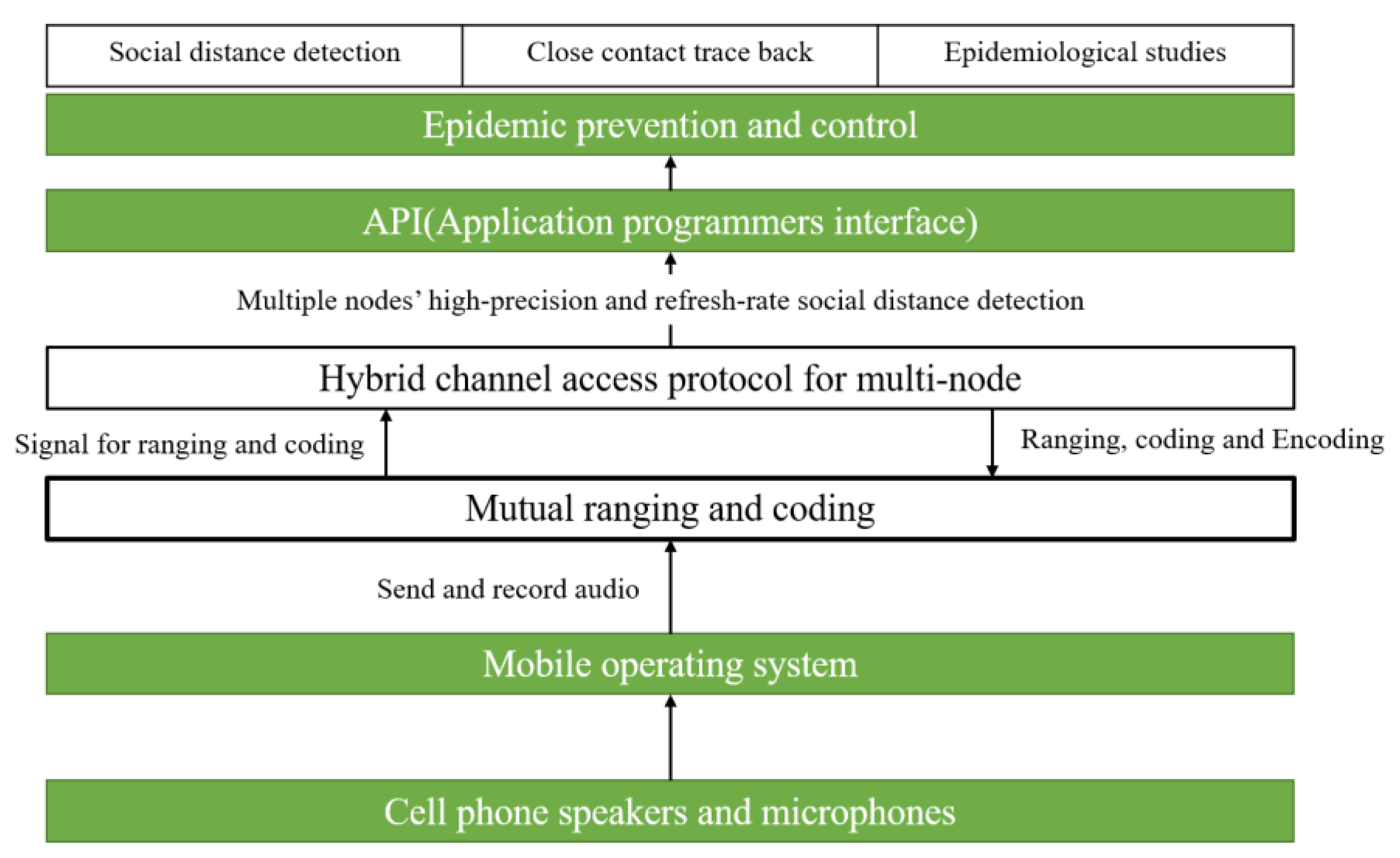
- The system architecture of the system involved in this article is shown in Figure 2.
2. Related Works
2.1. Wi-Fi
2.2. BLE
2.3. UWB
2.4. PDR
2.5. Acoustic
3. Framework of the System
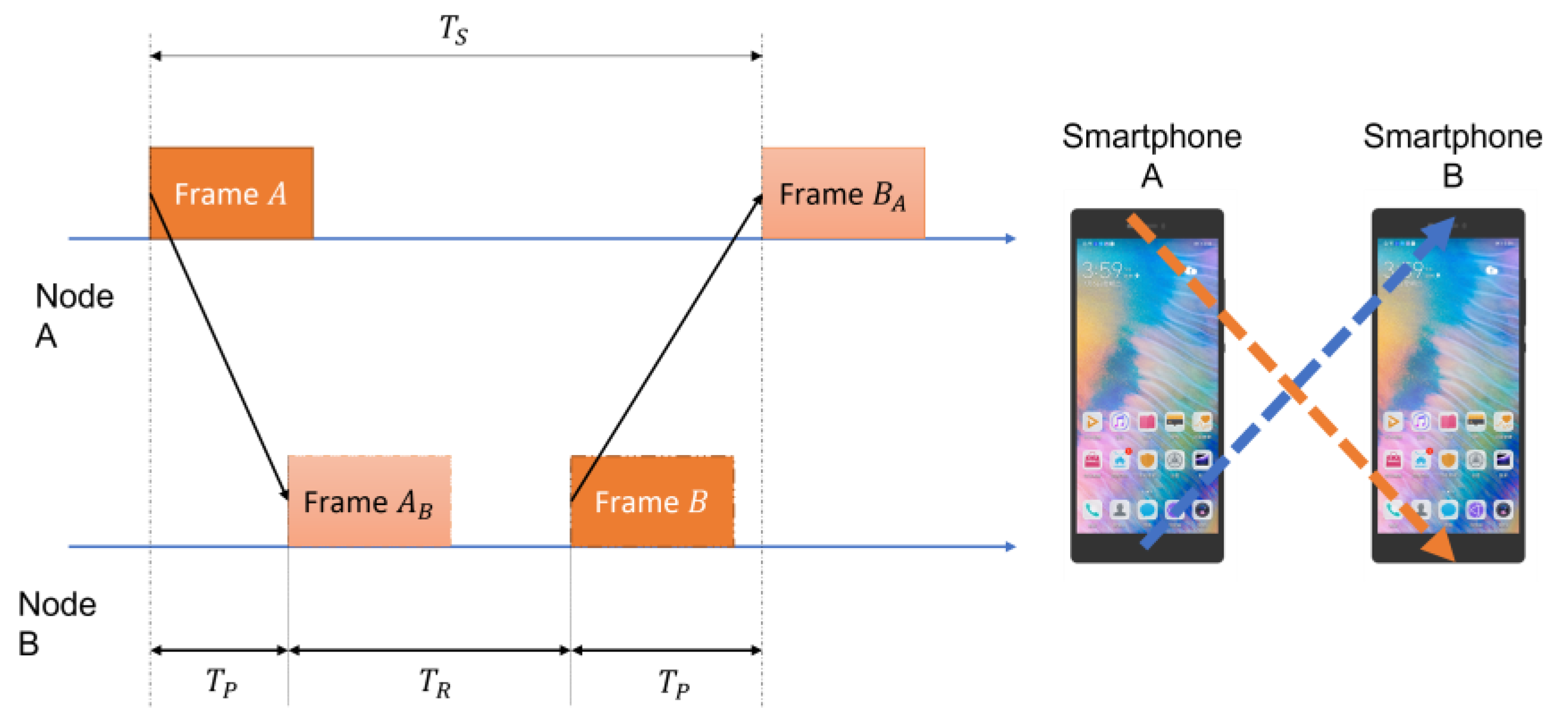
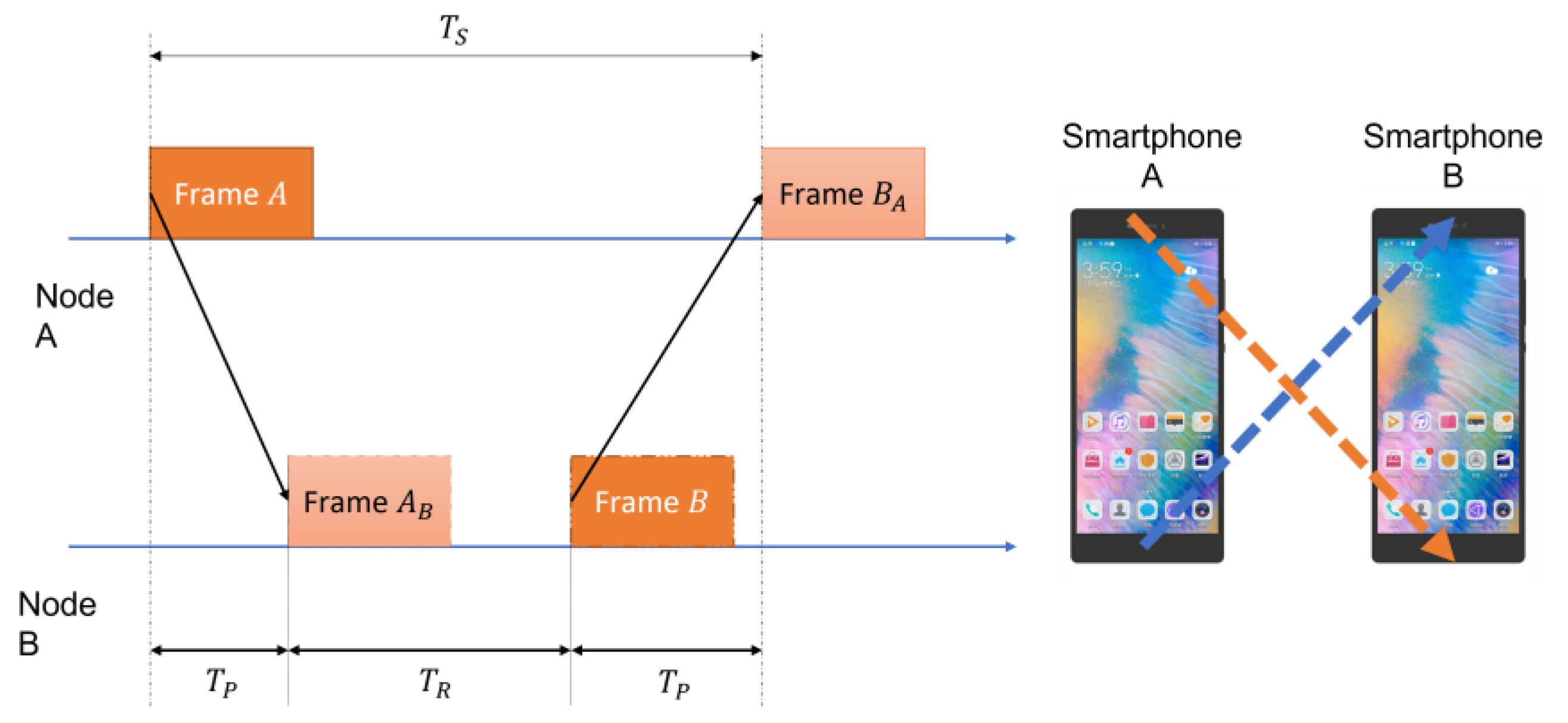
3.1. Mutual Ranging Principal of BeepBeep
3.2. Optimized Signal Designed
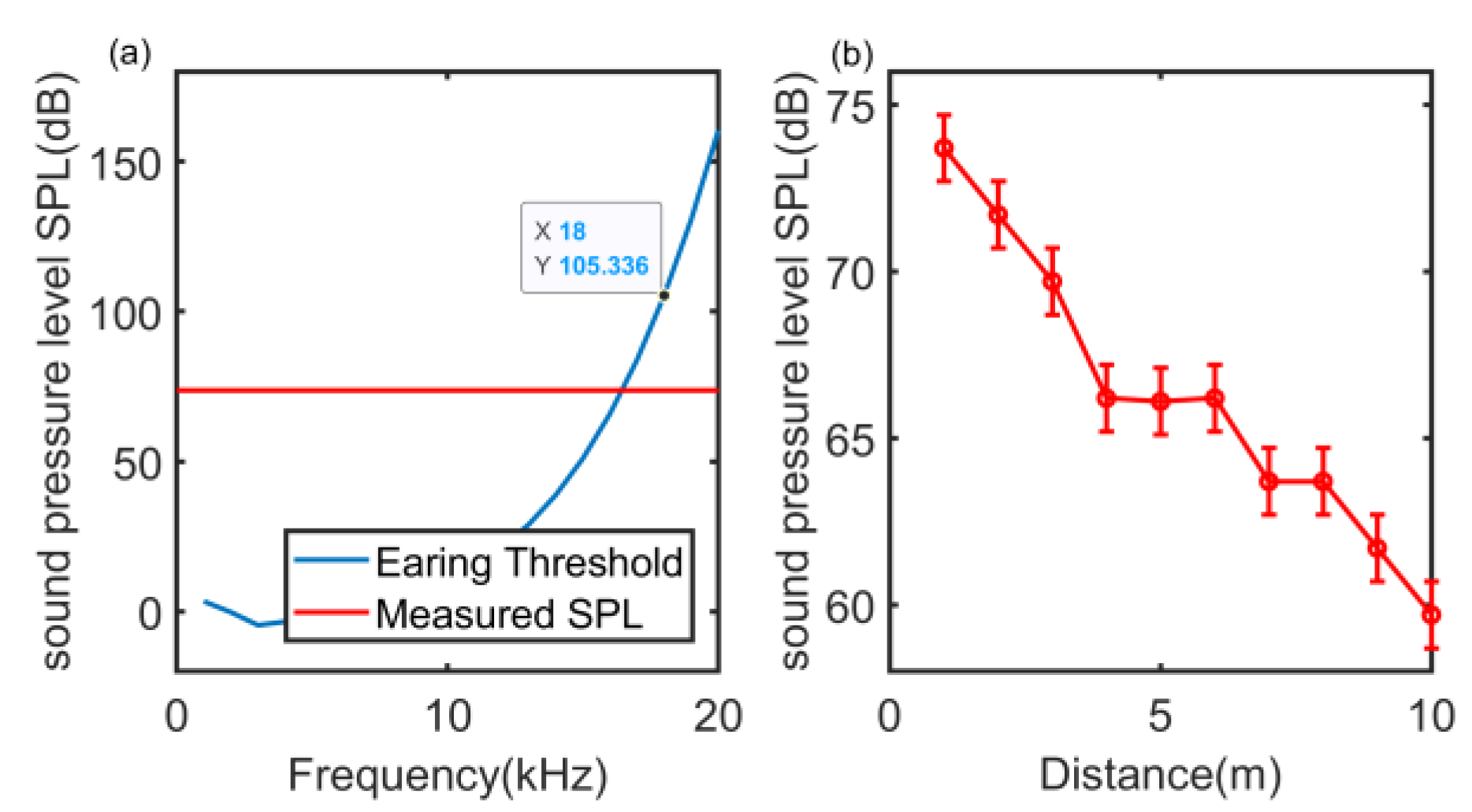
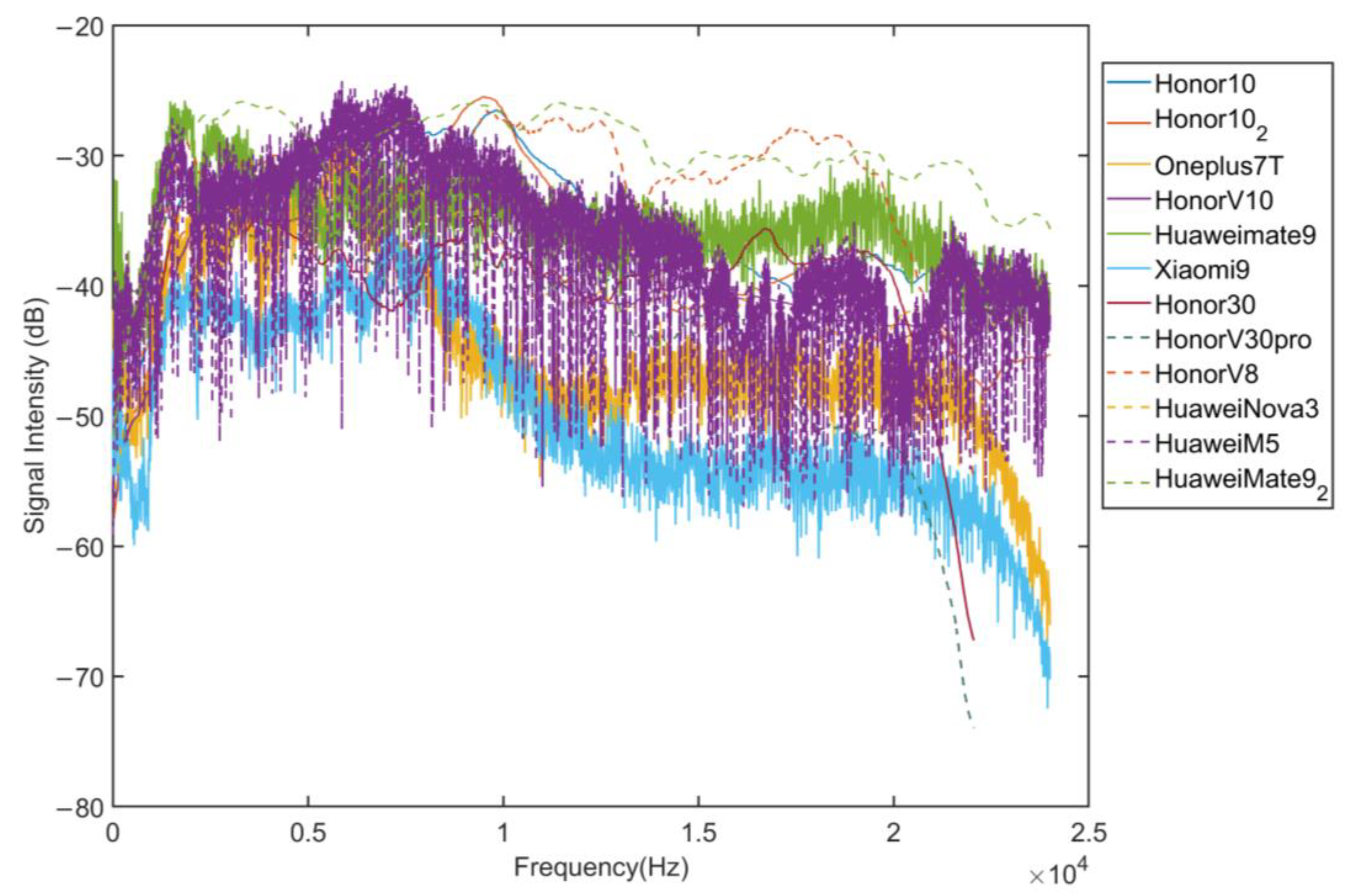
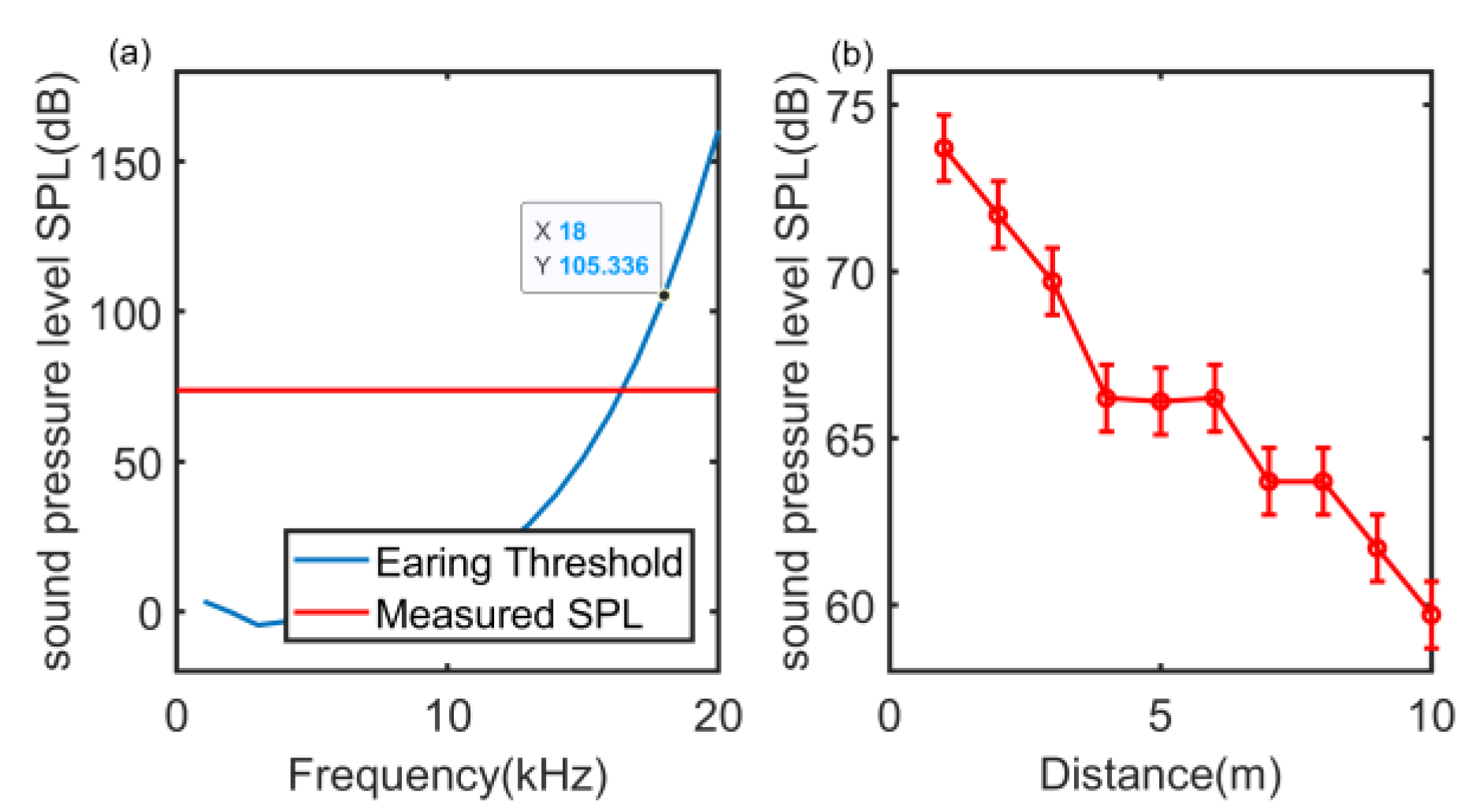
3.2.1. Signal Frequency Band
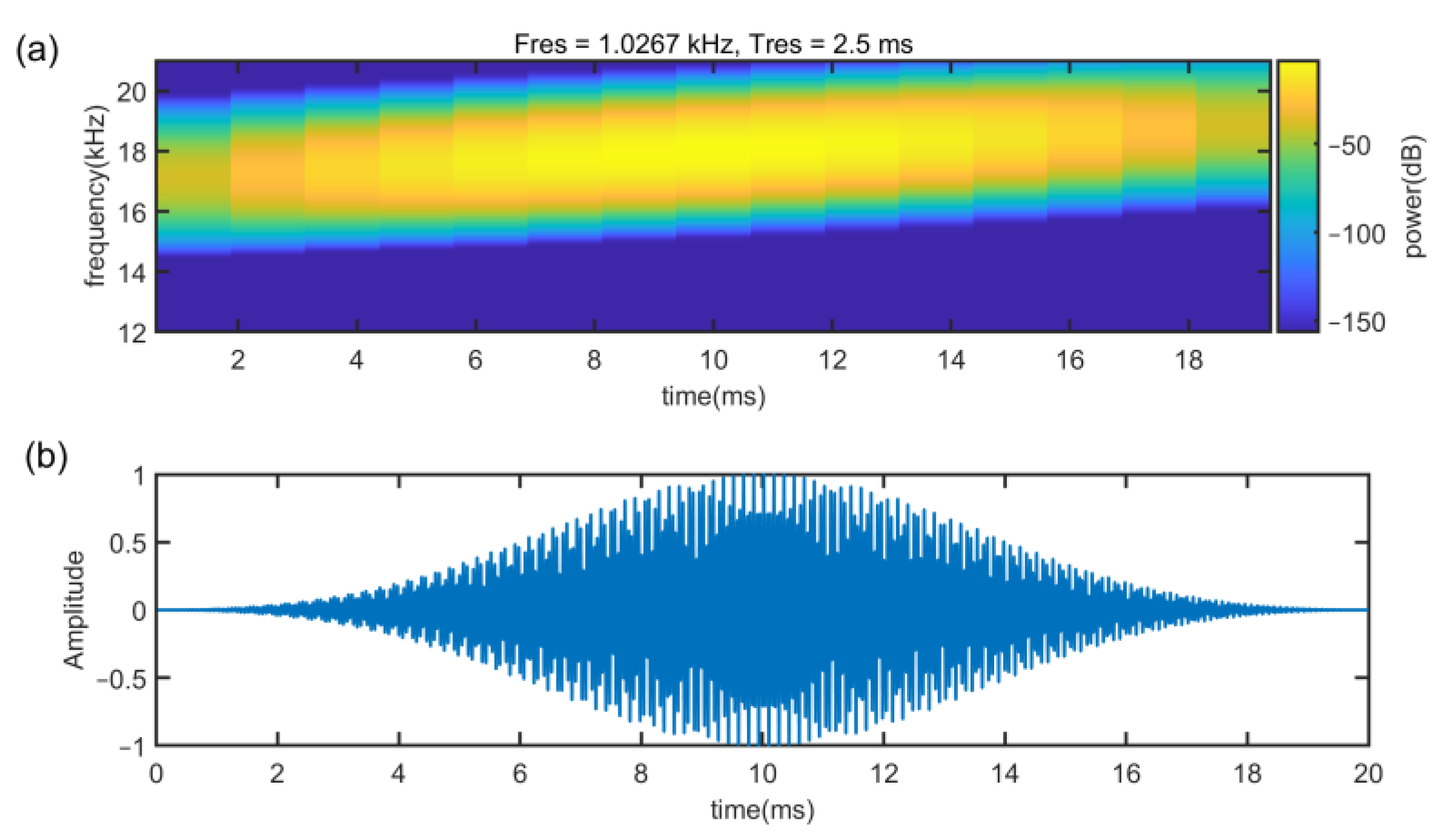
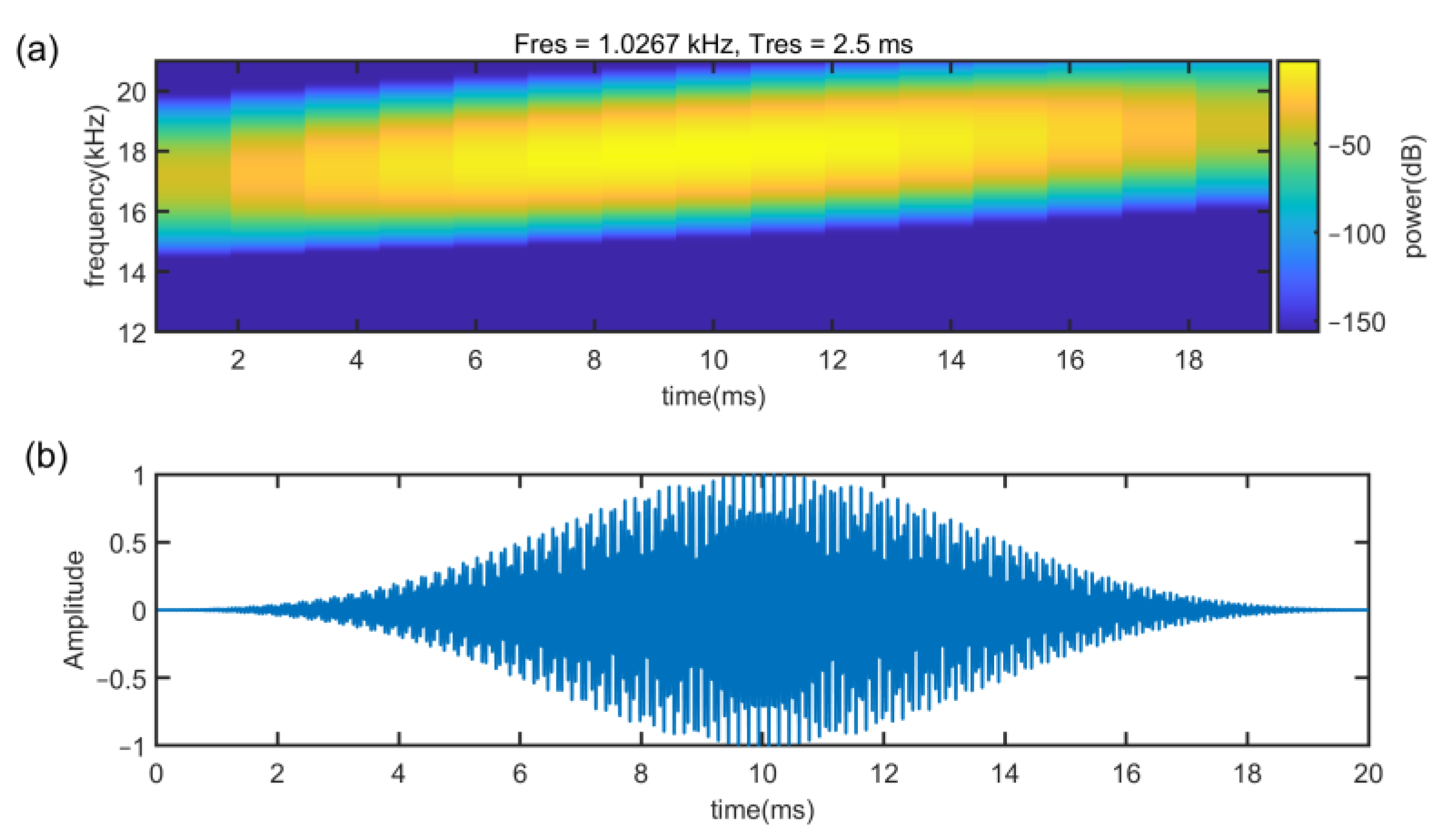
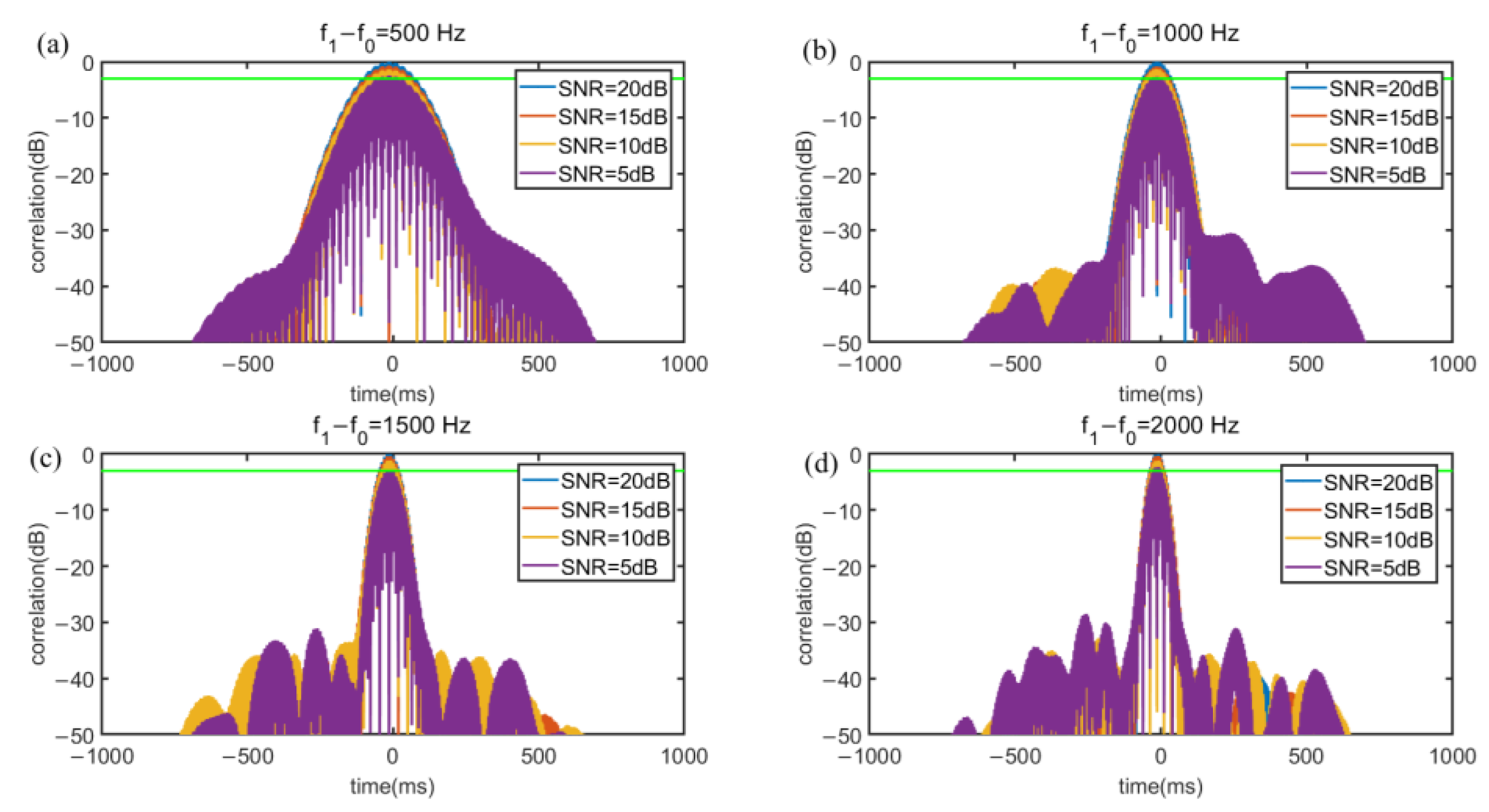
3.2.2. Signal Wave Designed—Chirp Signal
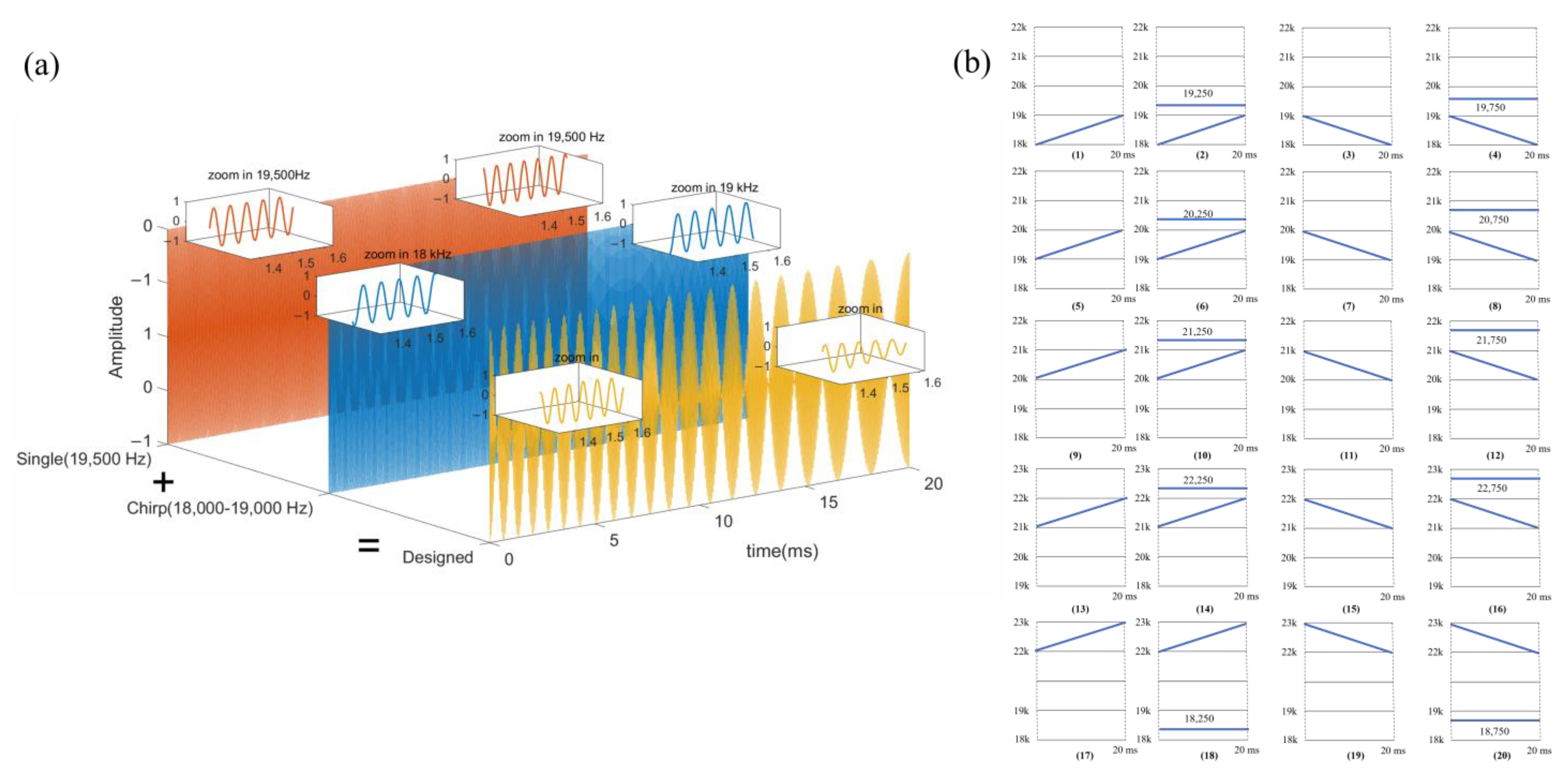
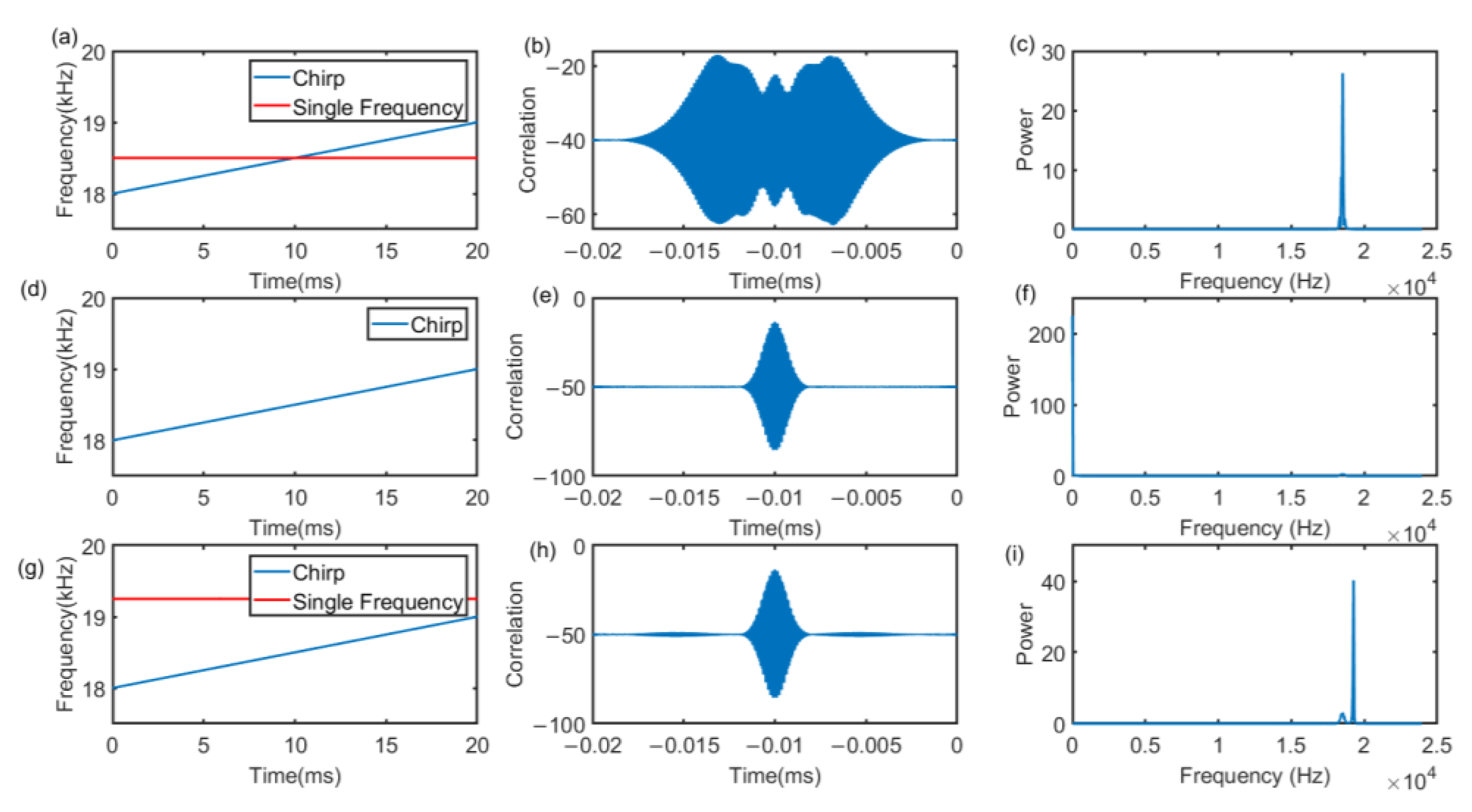
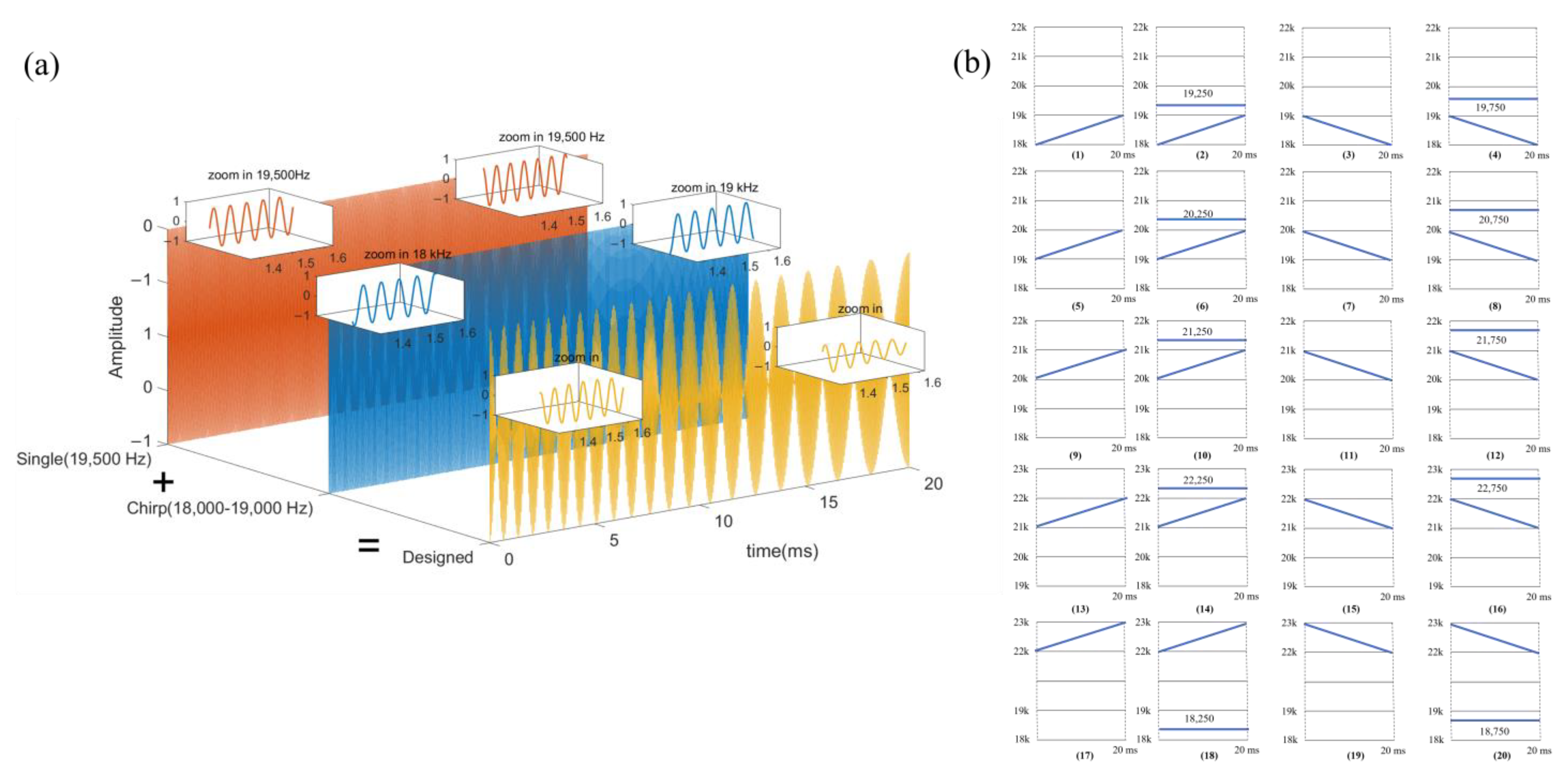
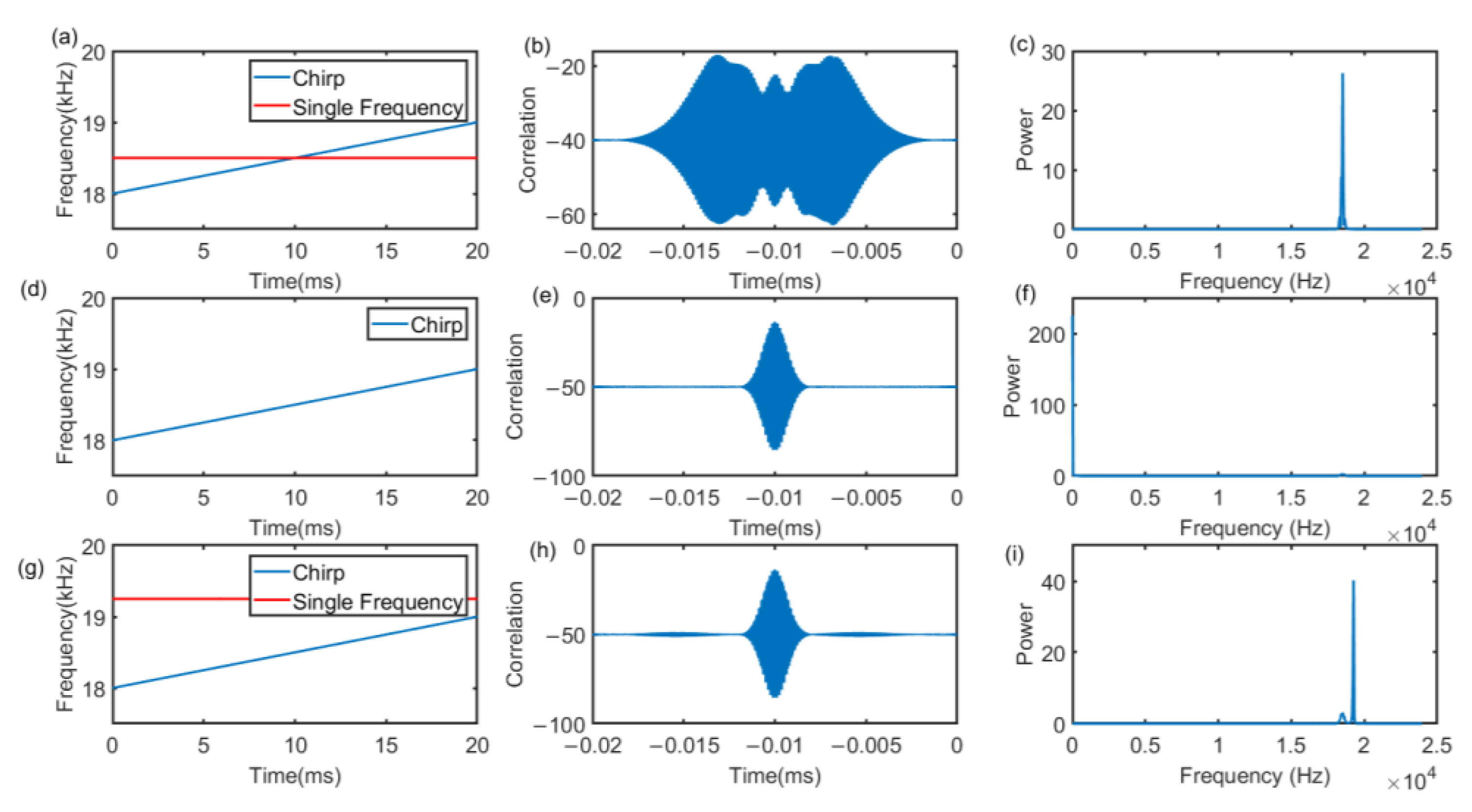
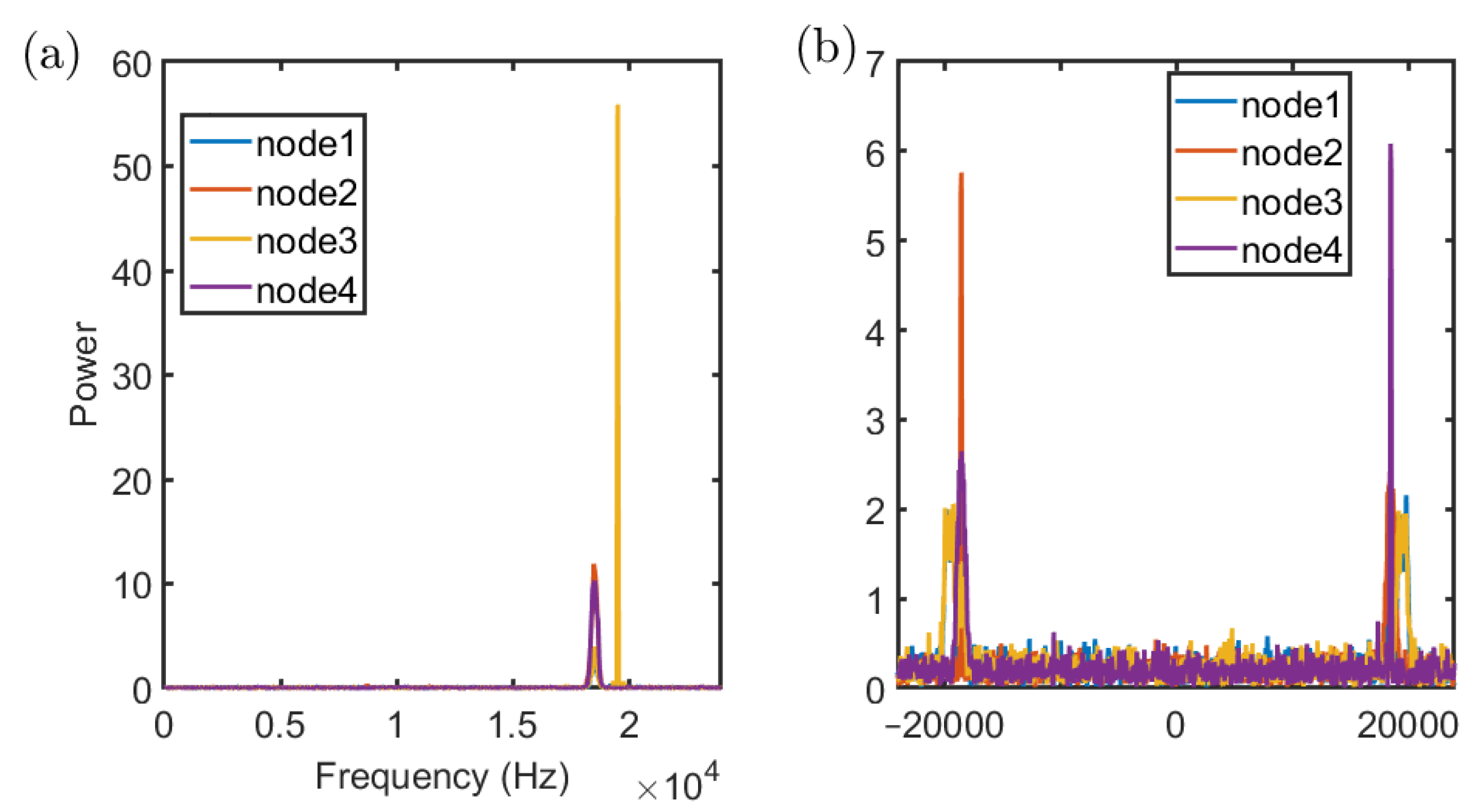
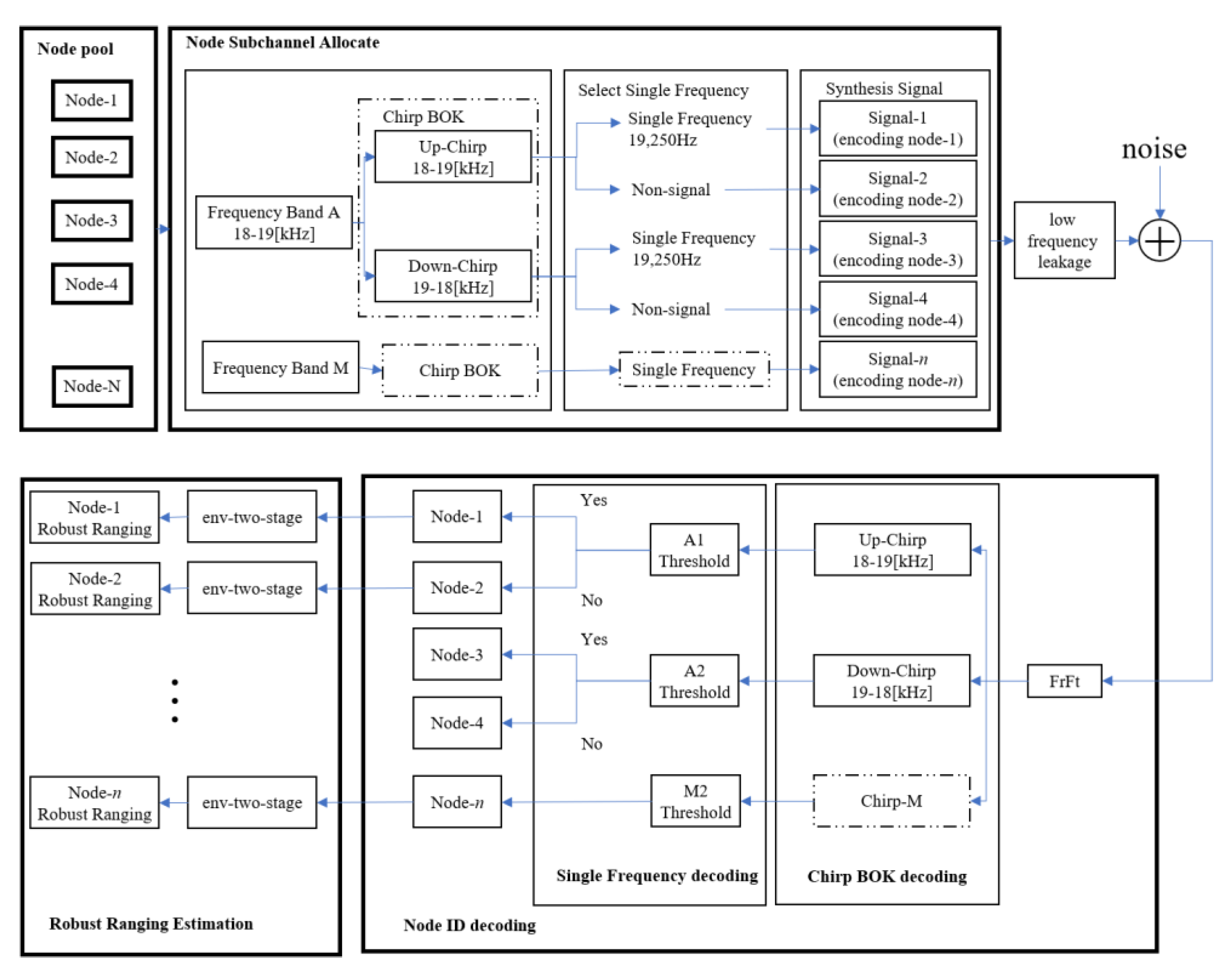
3.2.3. Sub-Band Signal Wave Designed
- Up-Chirp and down-Chirp can be concurrent. When the up-Chirp and the down-Chirp overlap and conflict at the receiving end, it is possible to distinguish which Chirp signal the single-frequency signal corresponds to;
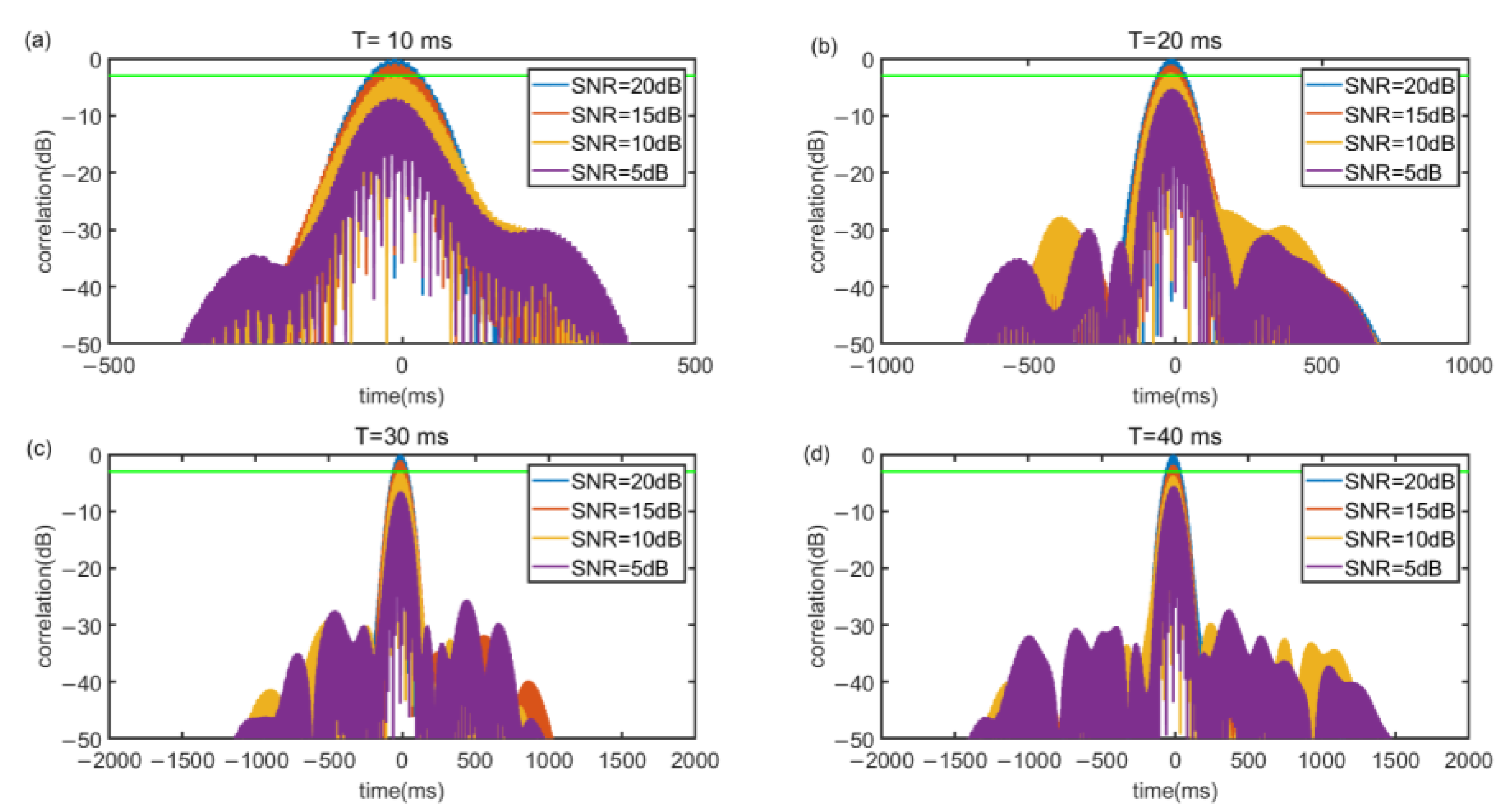
- It still guarantees a high delay estimation resolution;
- Due to the possible Doppler frequency shift, a guard interval needs to be reserved between different single-frequency signals.
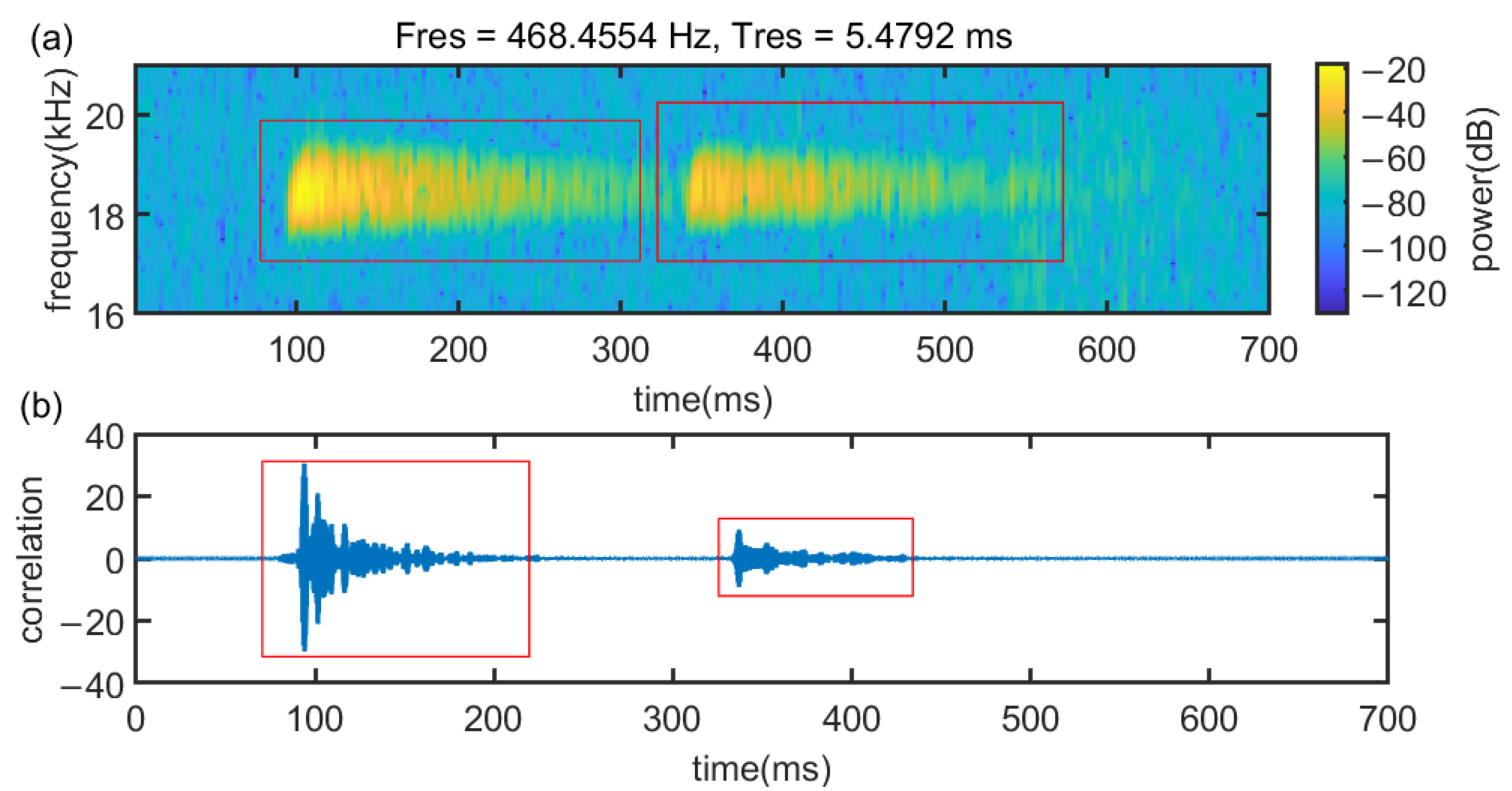
3.3. Robust Mutual Ranging Algorithm
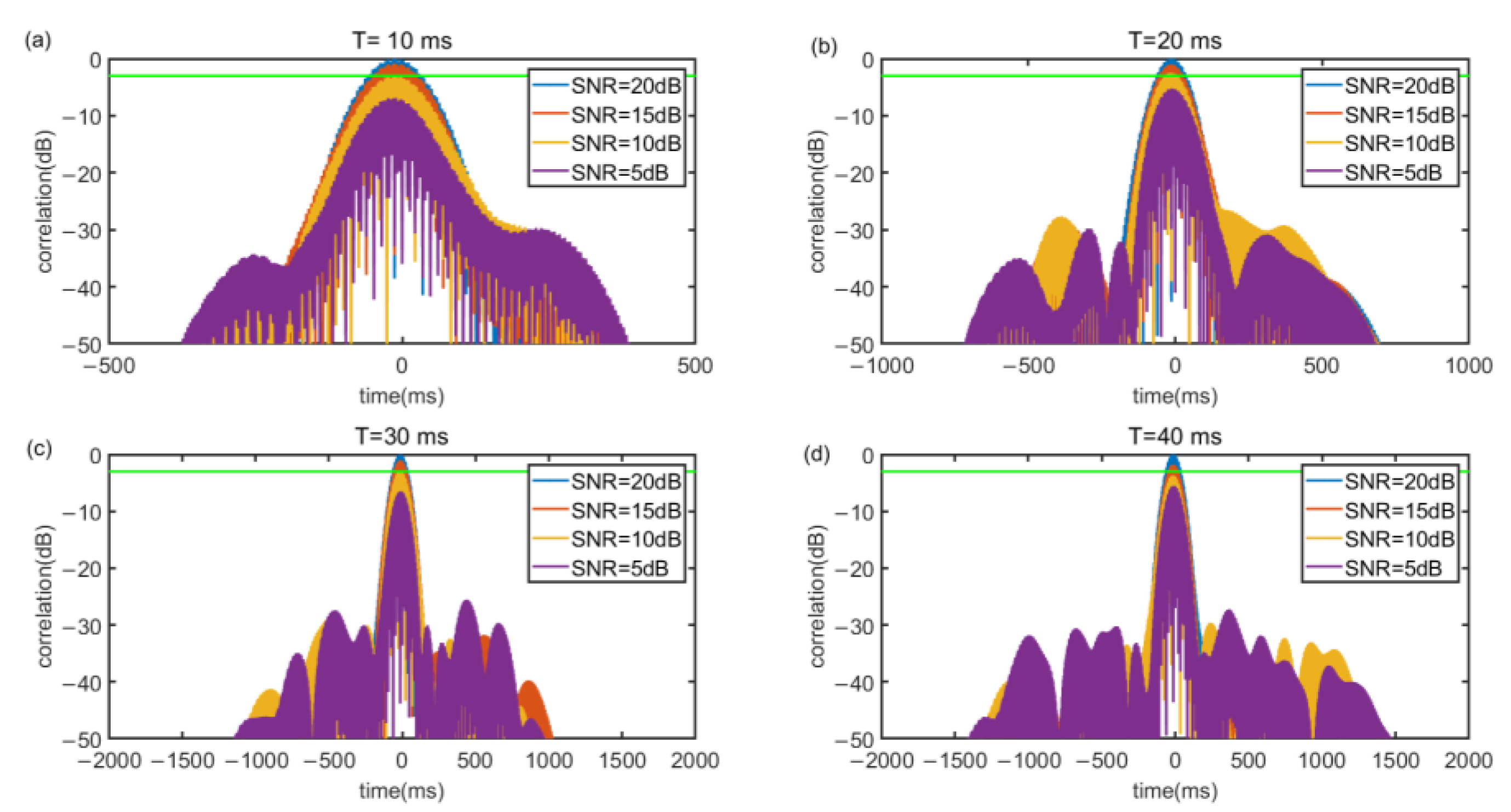
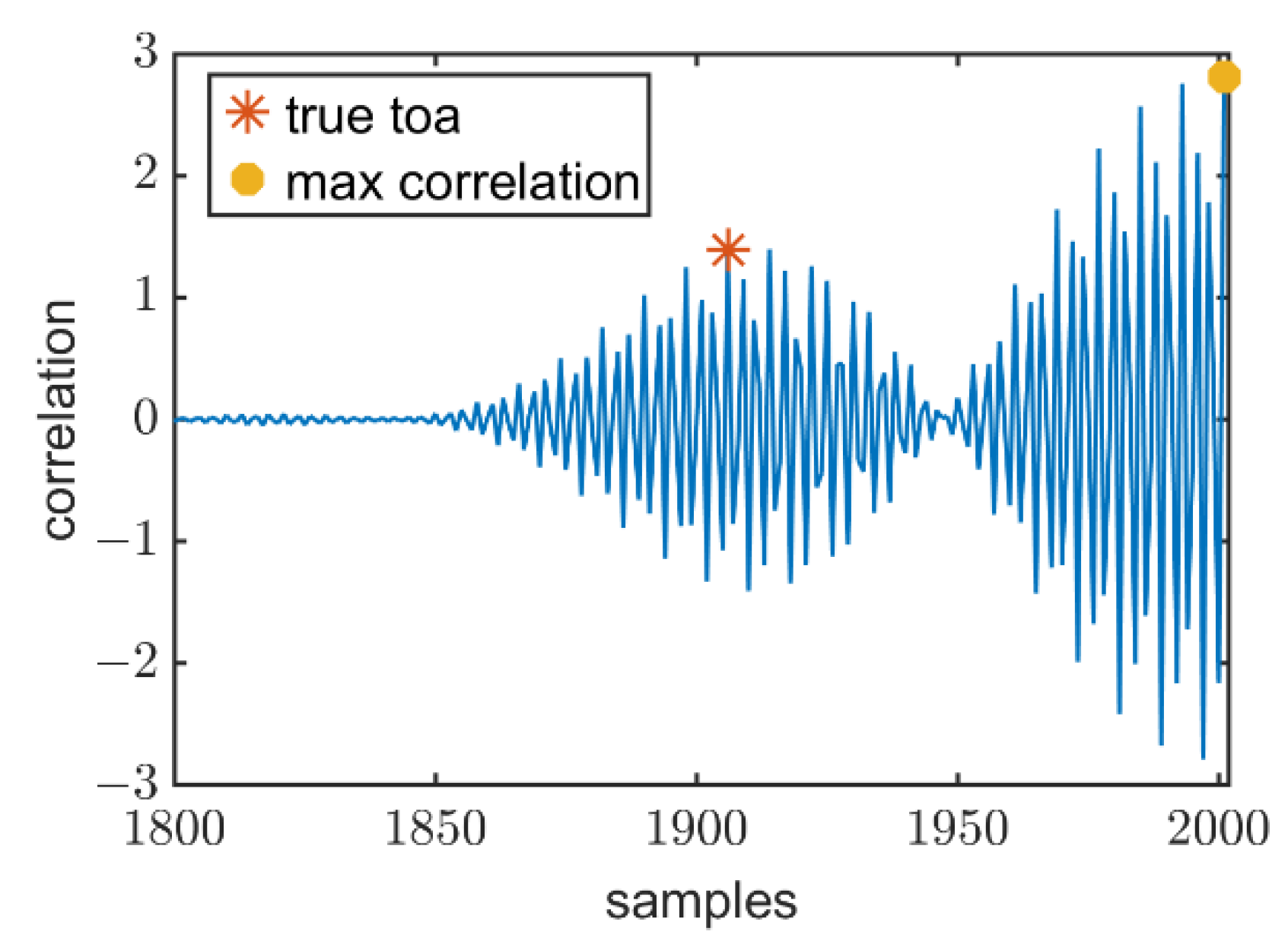
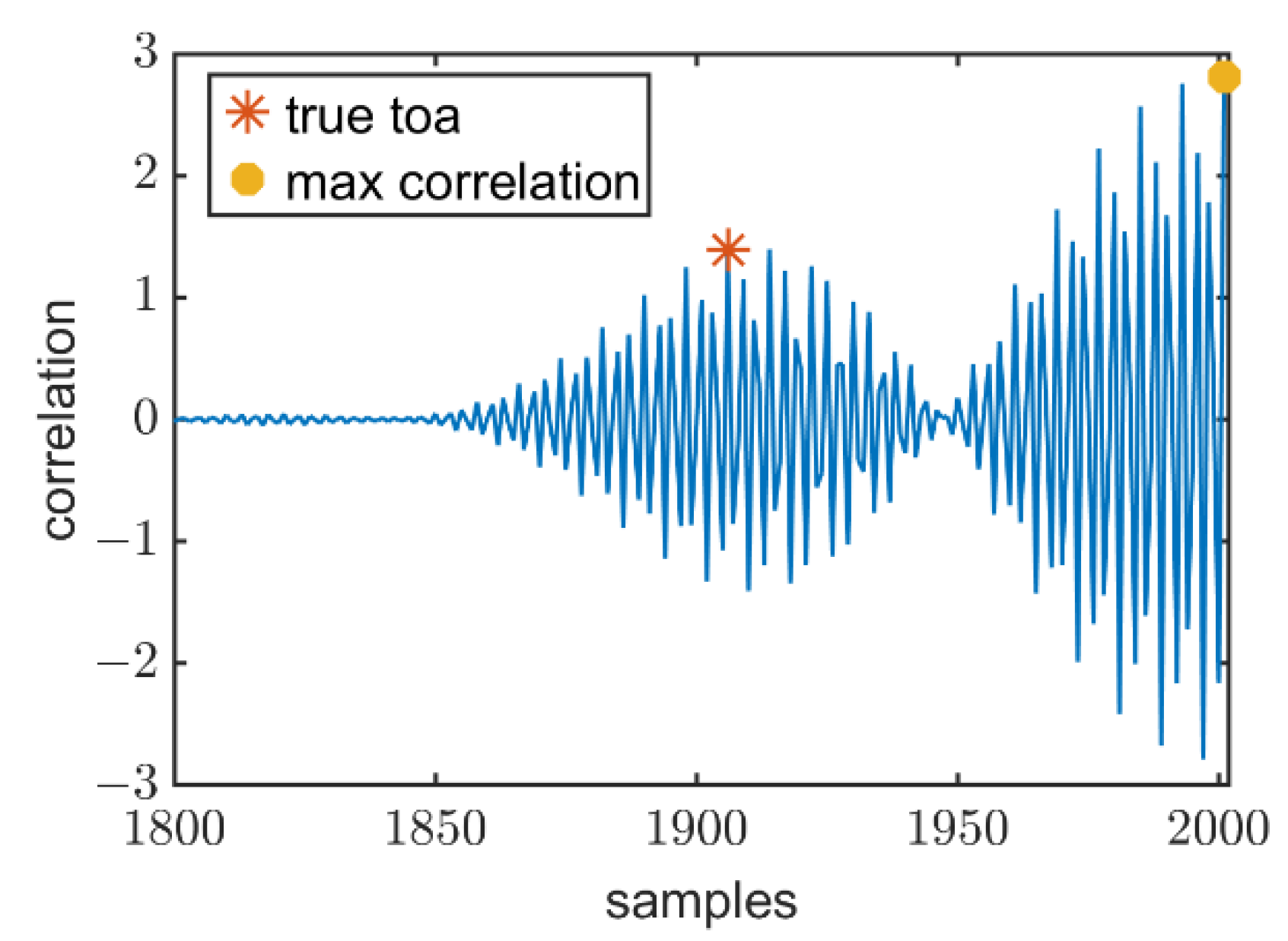
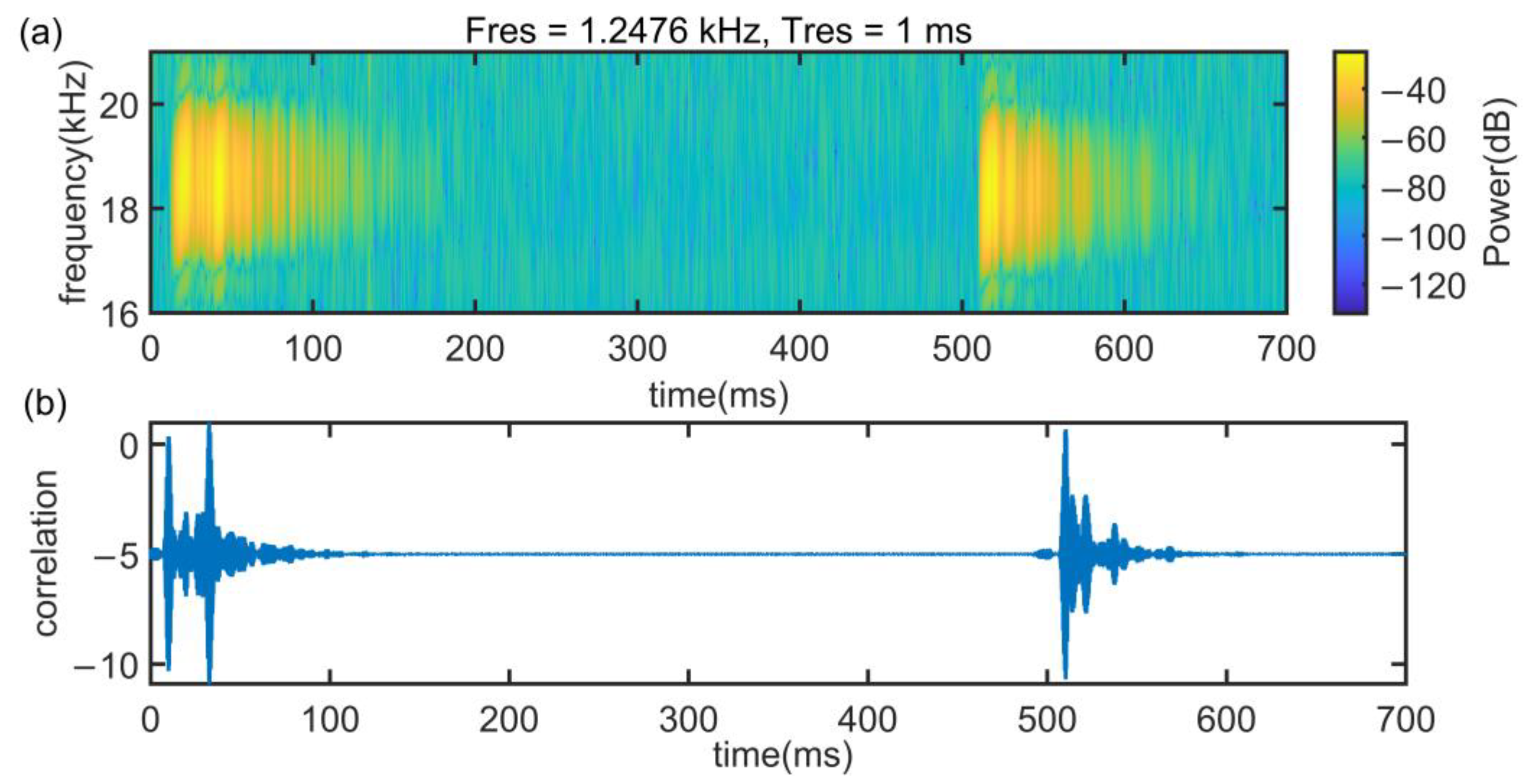
3.3.1. Traditional Correlation Algorithm
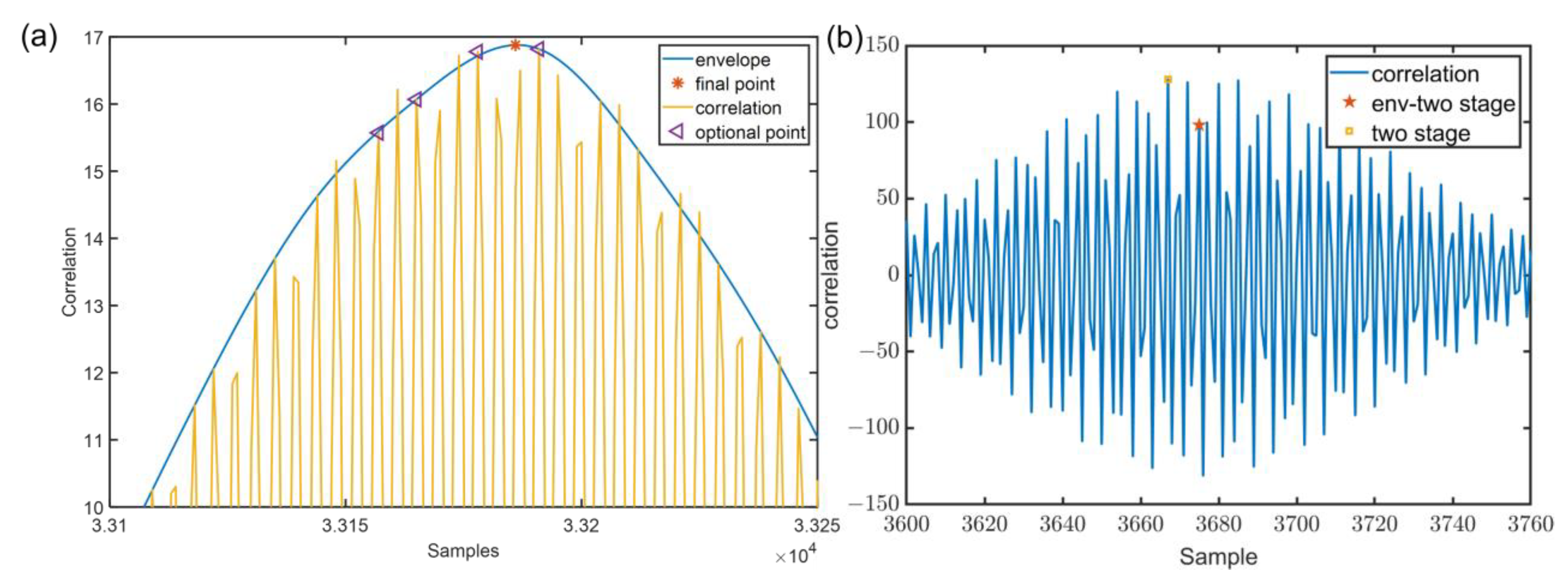
3.3.2. Robust Mutual Ranging Algorithm
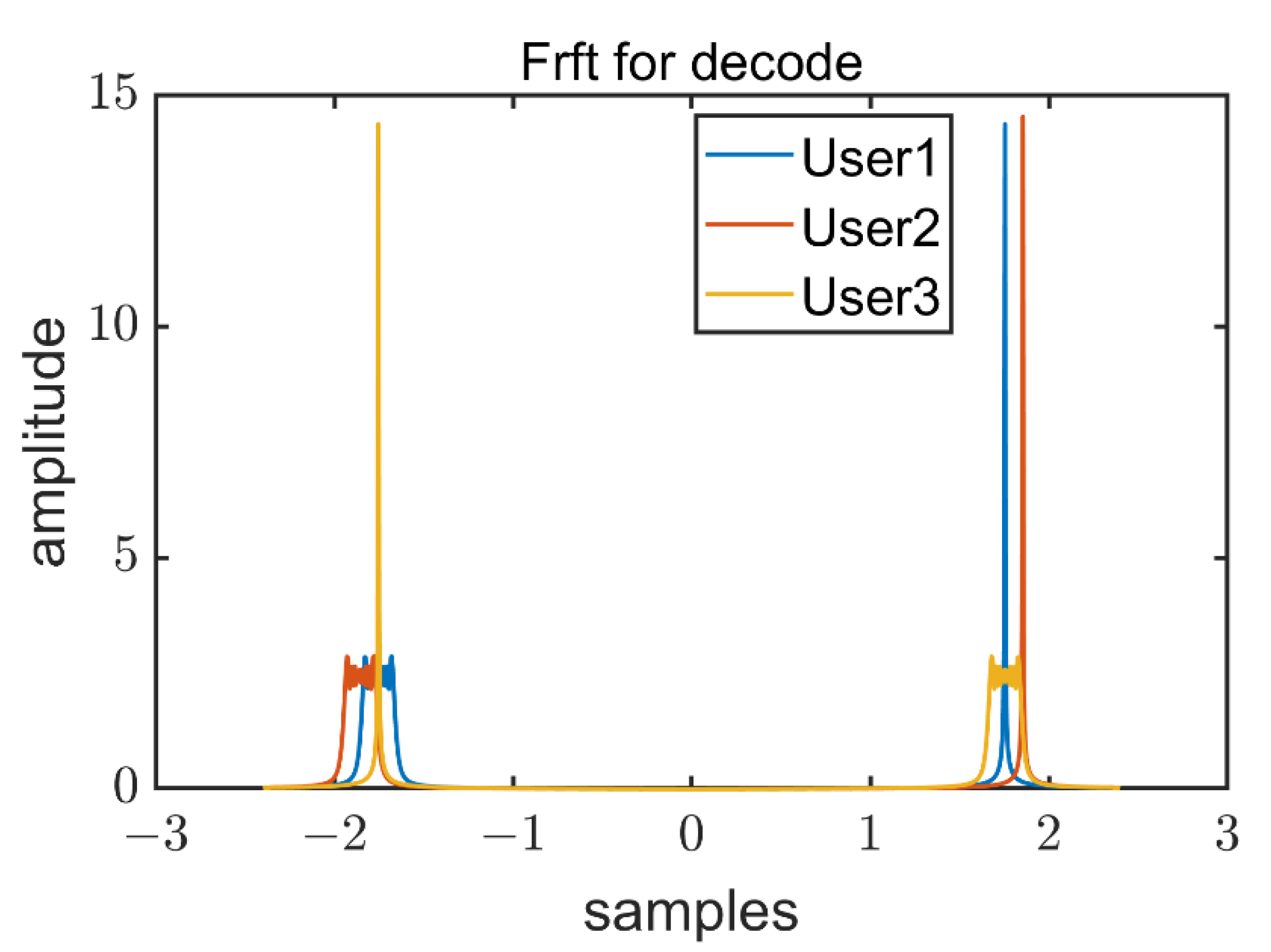
3.4. Improved Identification of ID Sub-Bands
3.5. Hybird Channel Access Schemes
- CSMA/CA
- FDMA
- Chirp BOK
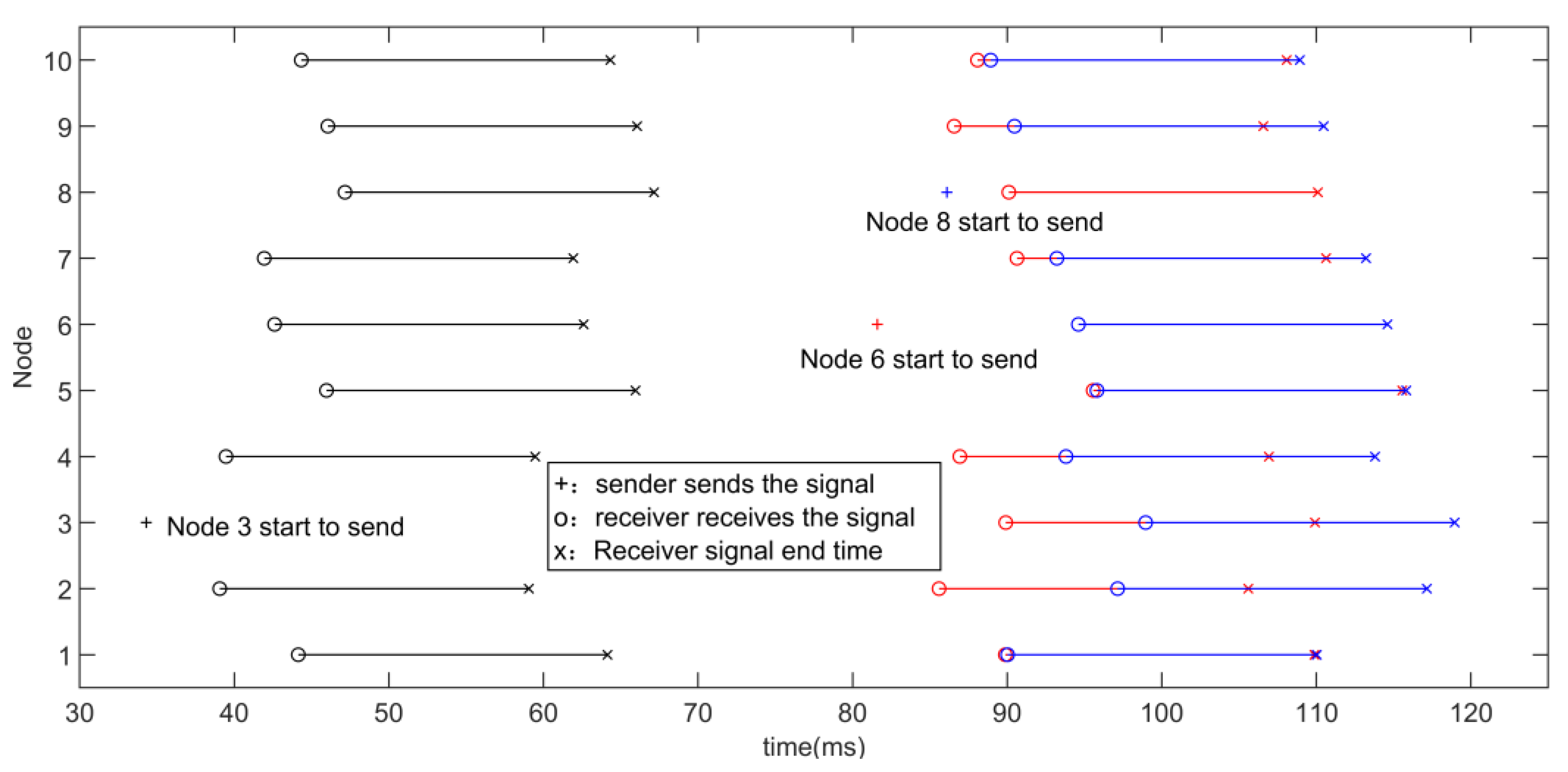
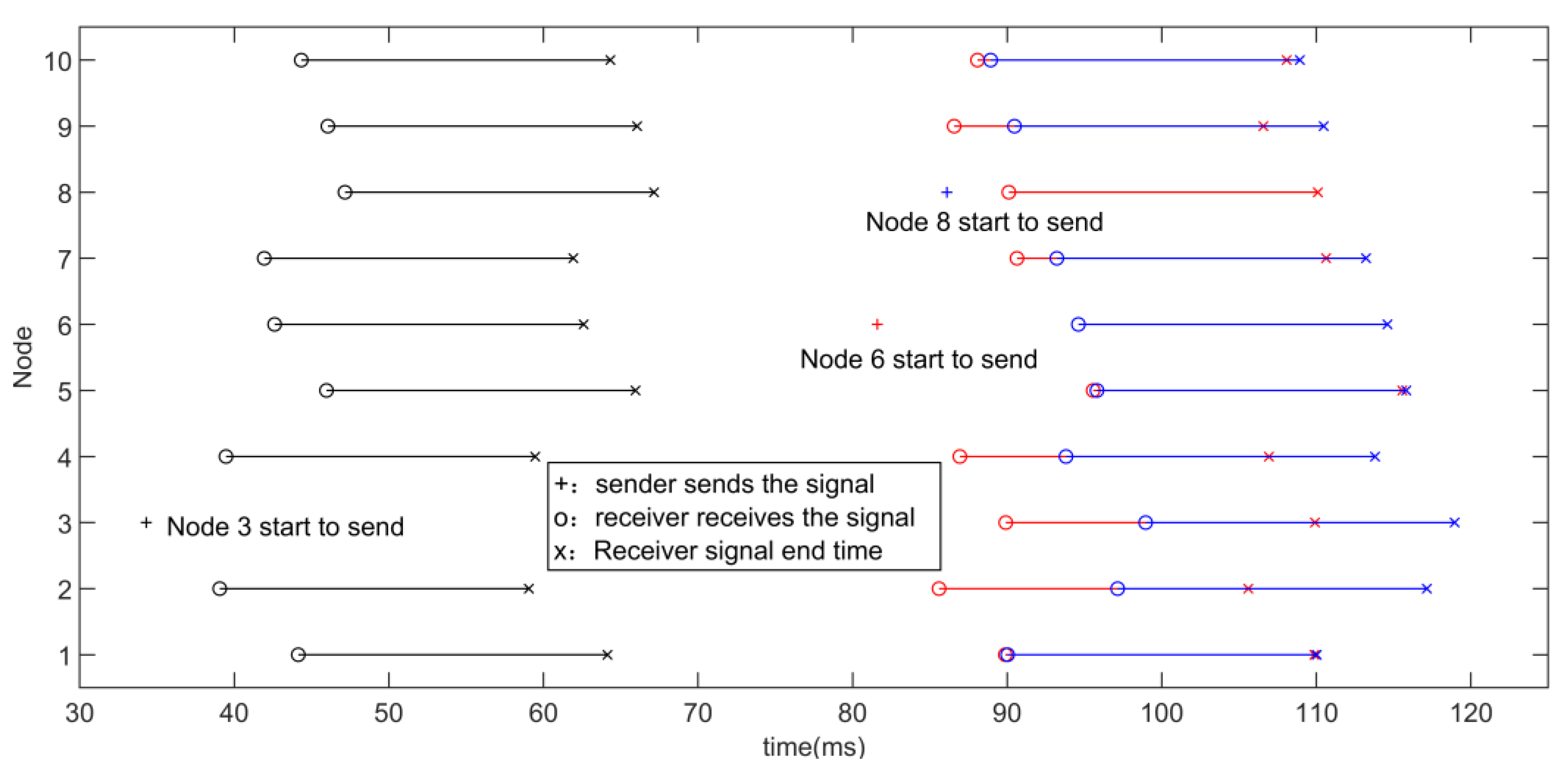
- The near-ultrasonic signal is used for ranging and coding. Since the length of the frame is close to the maximum signal propagation delay between nodes, a longer propagation delay will increase the probability of collision. Therefore, on the basis of CSMA/CA, drawing on the idea of P-persistent, when the channel is idle and the backoff is over, it will be sent with 100% probability, but now it will be sent with P probability;
- Based on the signals designed, combined with the pseudo-orthogonal characteristics of FDMA and Chirp BOK, multiple pseudo-orthogonal signals can be sent simultaneously;
- In the CSMA/CA method, when a node needs to send data for the first time (rather than a failed retransmission), if the channel is idle, it can be sent after waiting for Distributed Inter-frame Spacing (DIFS). However, in the perception of social safety distance, at the beginning of each round of node-cluster mutual ranging, nodes may send data centrally, so a fallback scheme is adopted for all nodes.
3.6. Overview of the System
4. Experiment and Simulation
4.1. Experiment of Ranging
4.2. MAC Simulation Settings
5. Result and Discussion
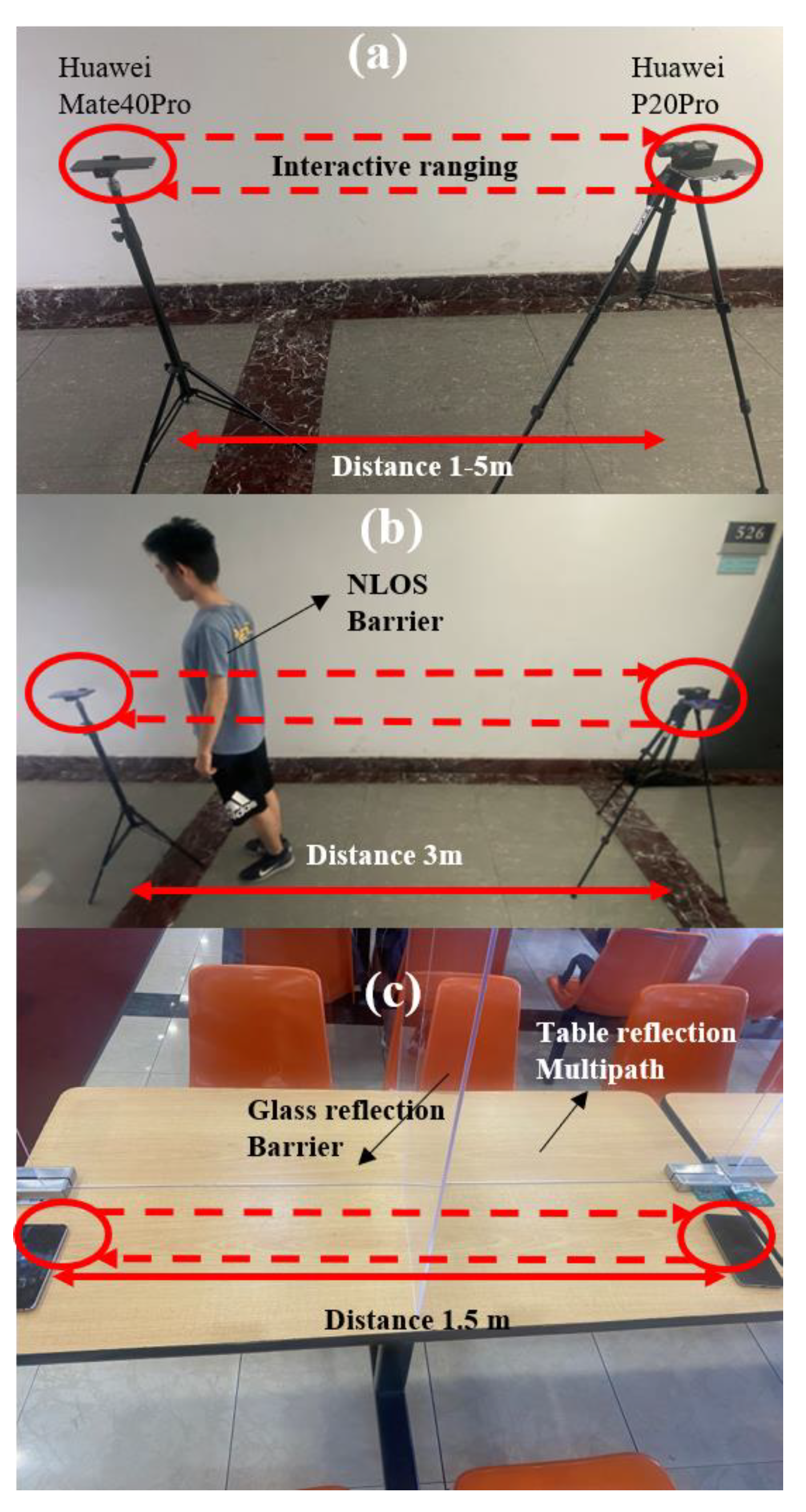
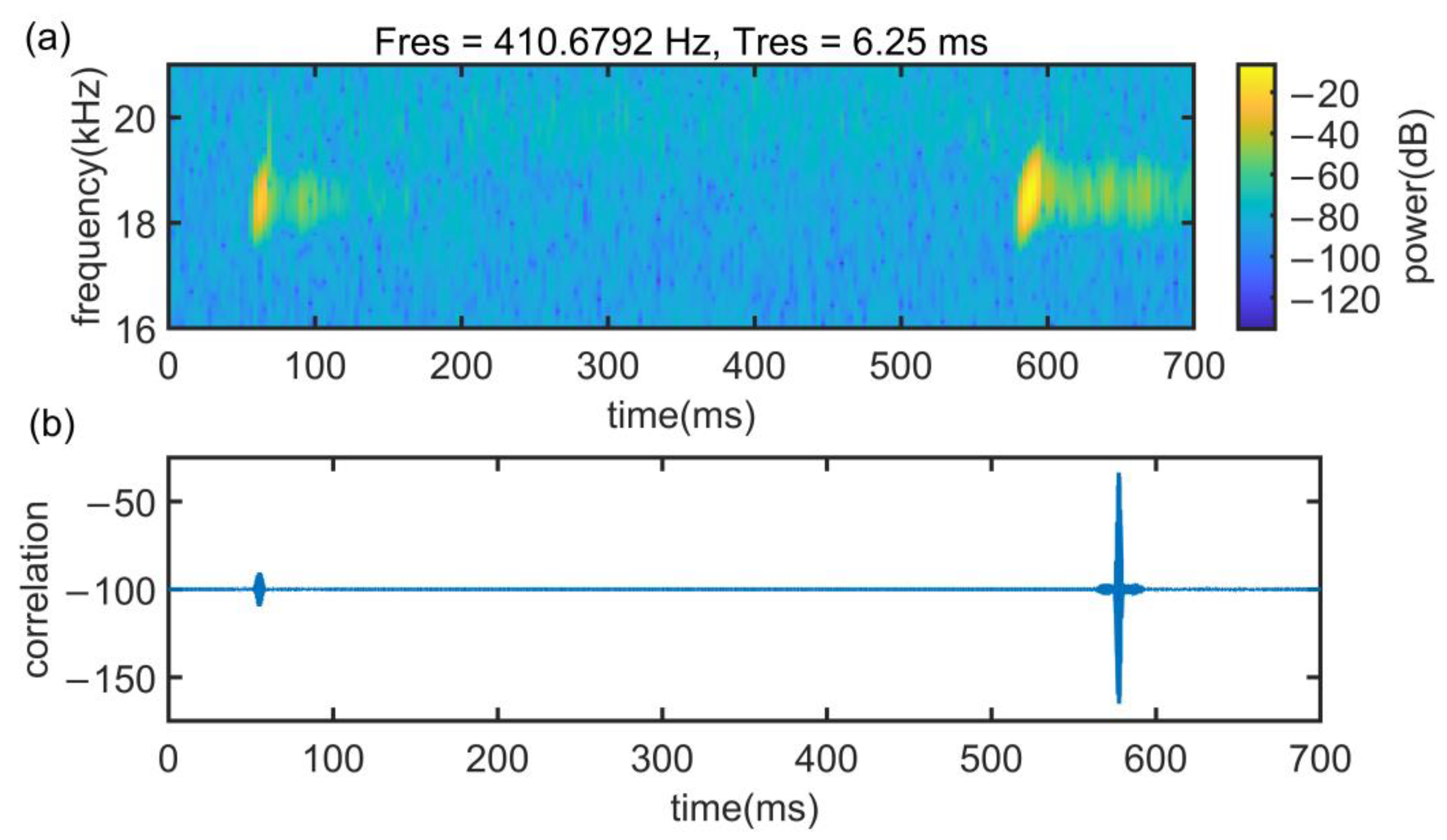
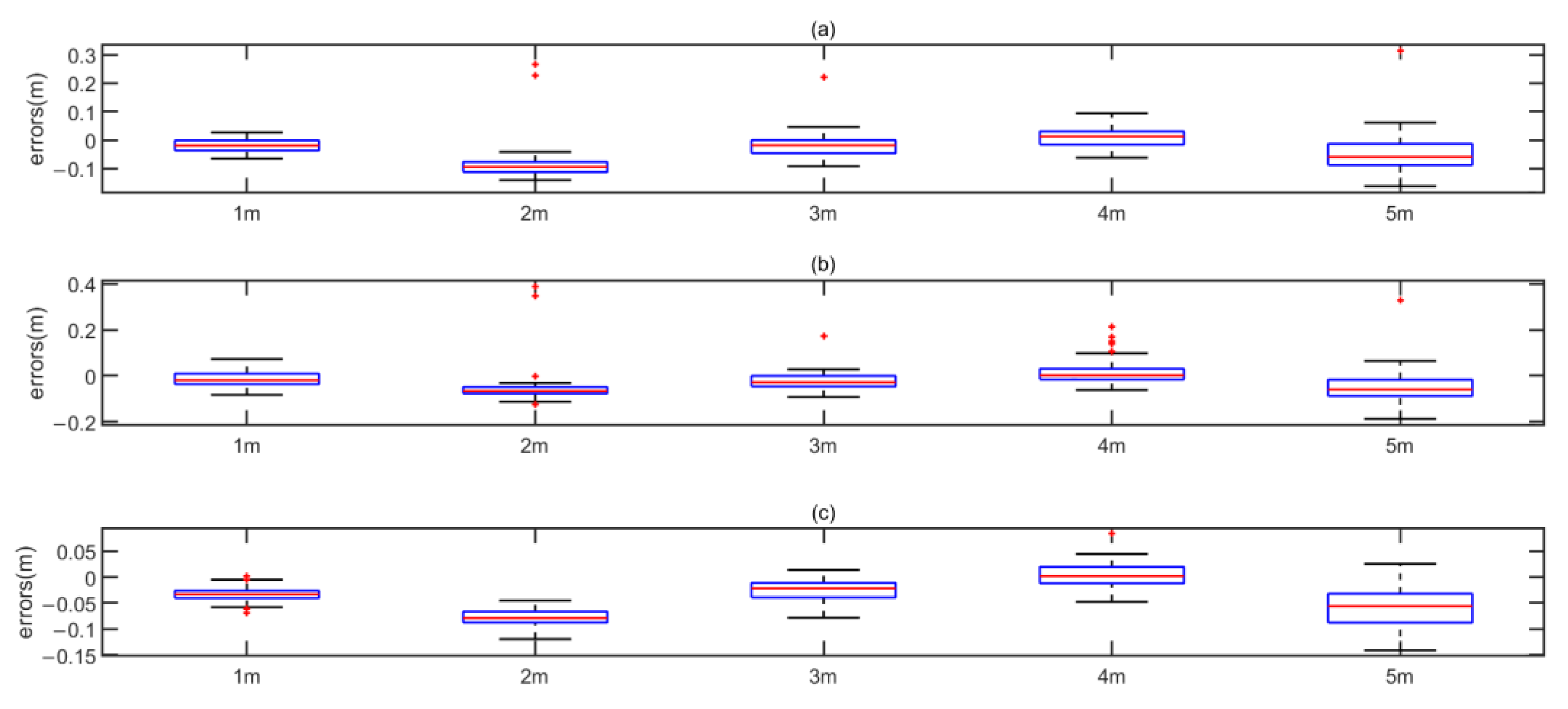
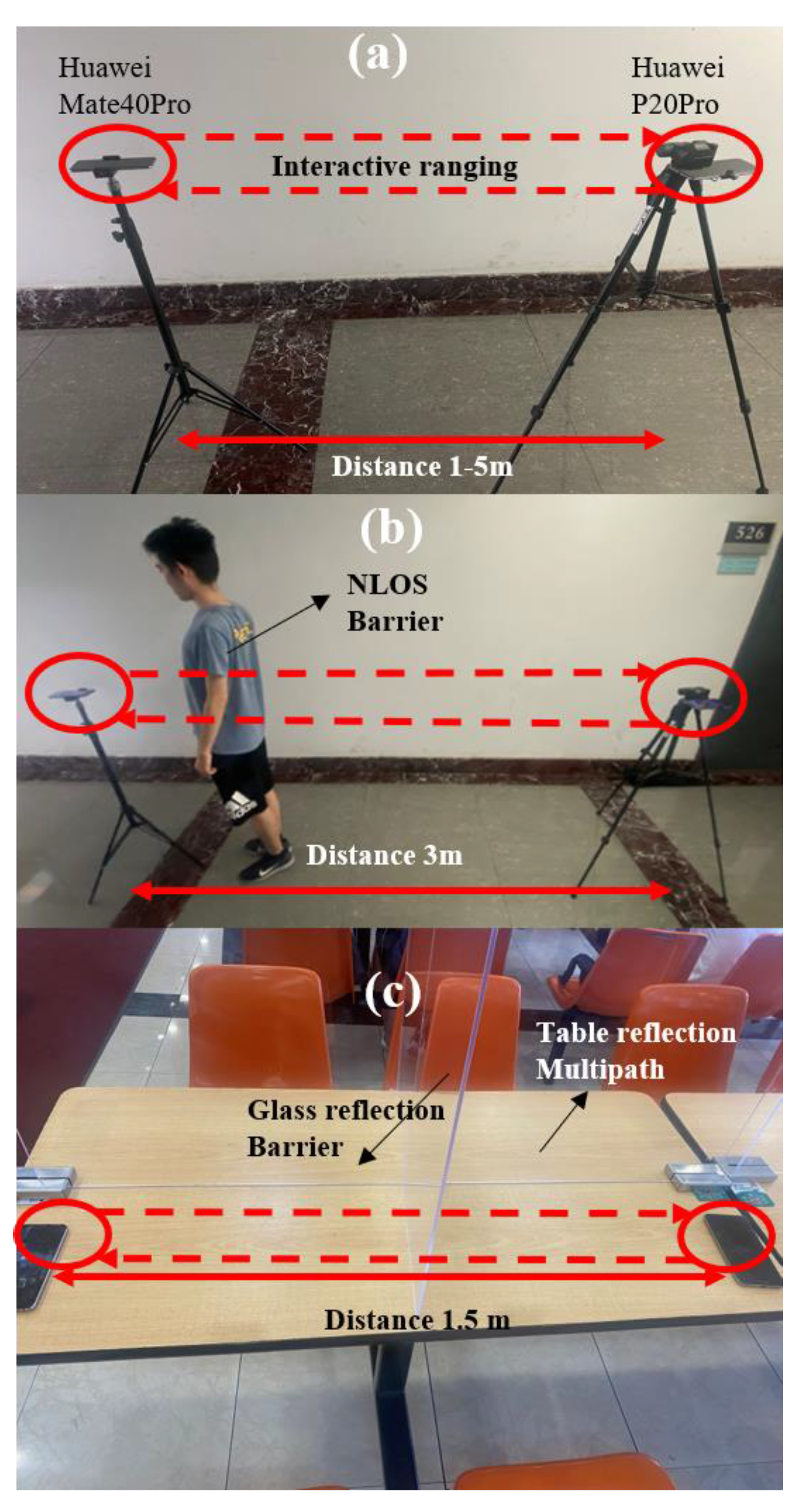
5.1. Case 1 LoS
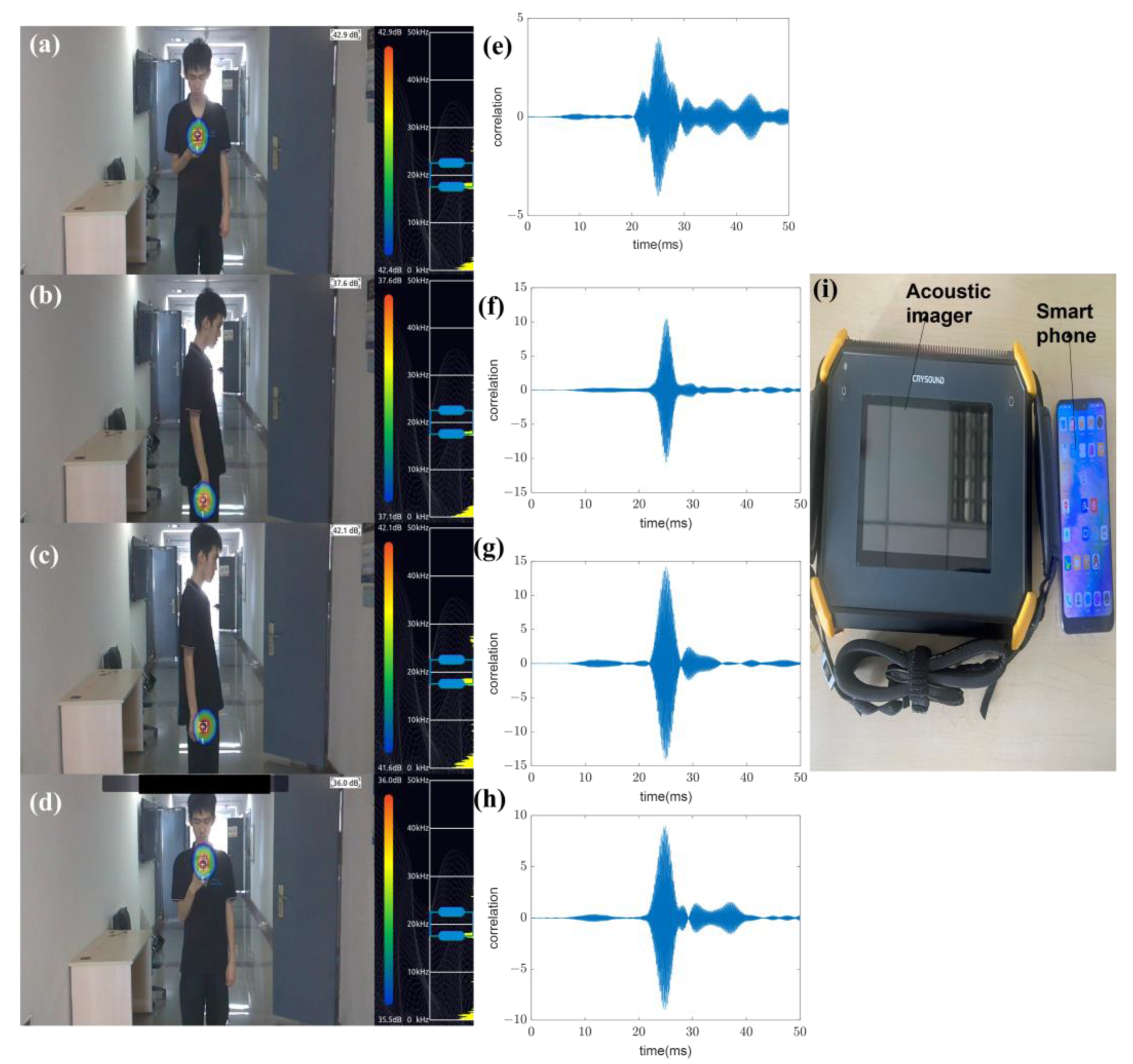
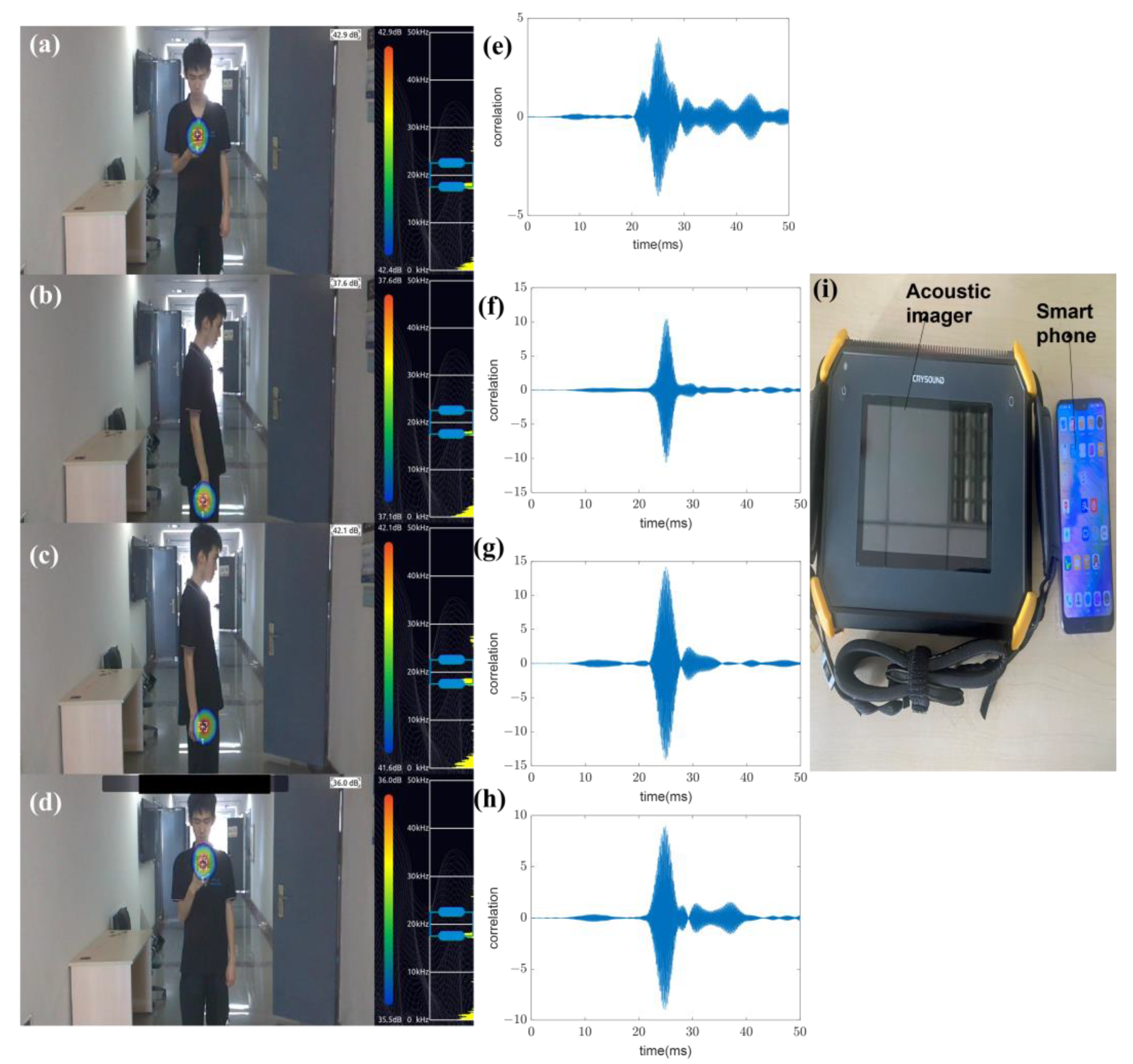
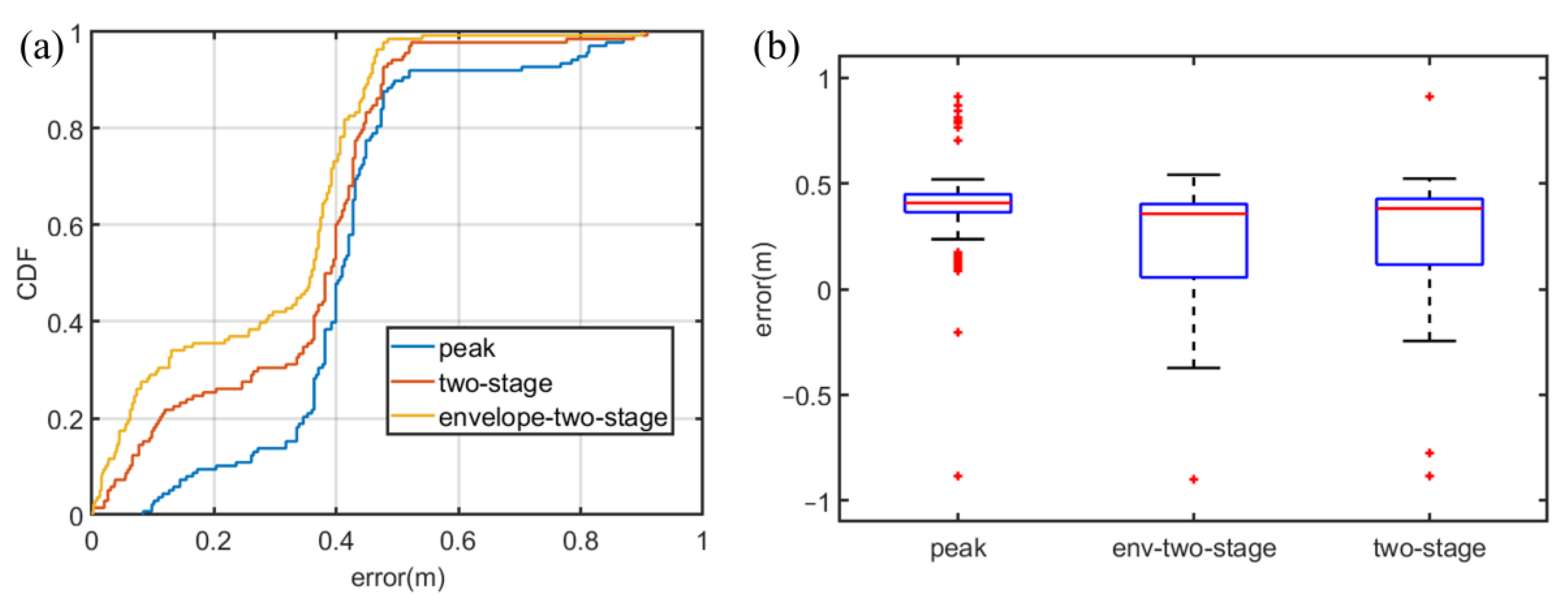
5.2. Case 2 NLoS by People
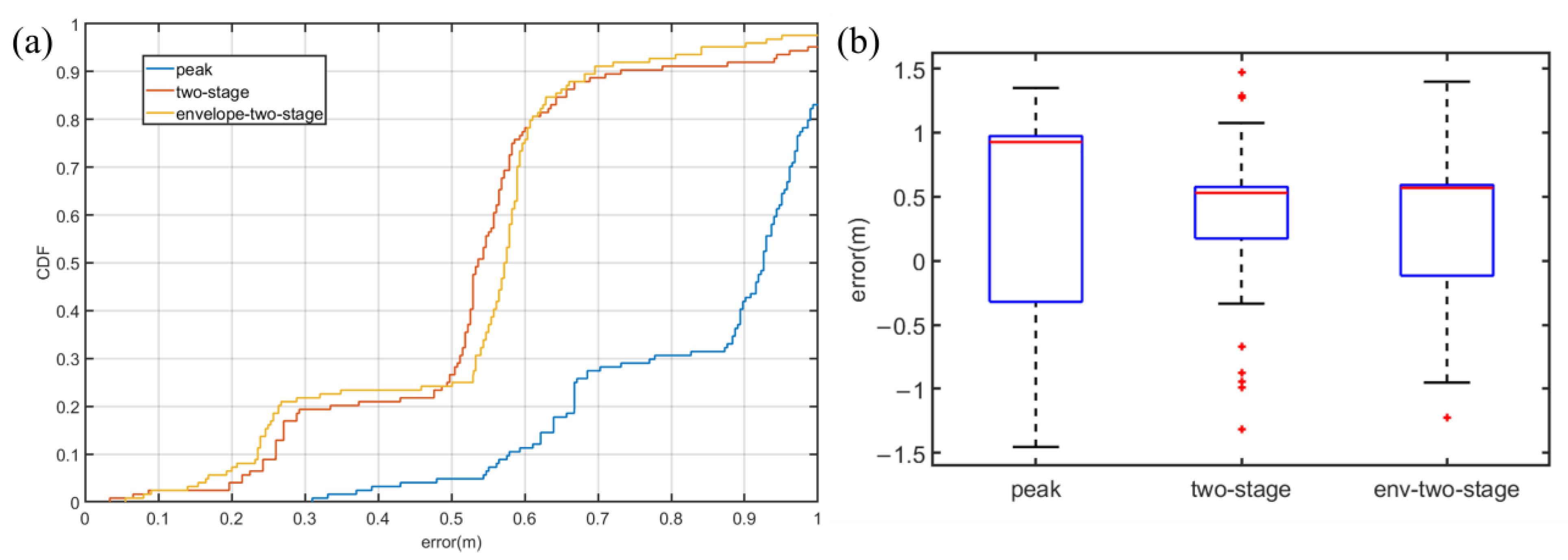
5.3. Case 3 Canteen
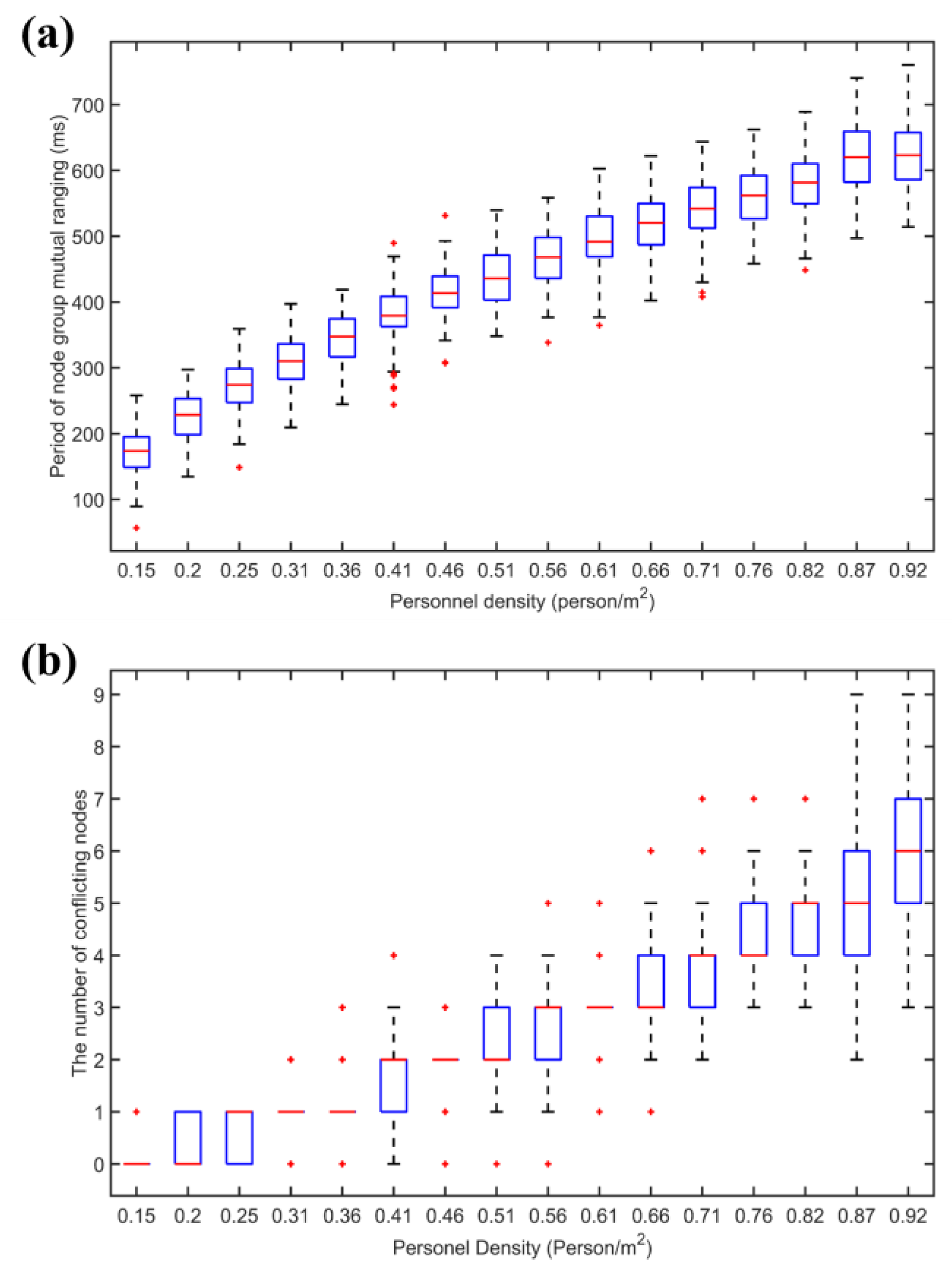
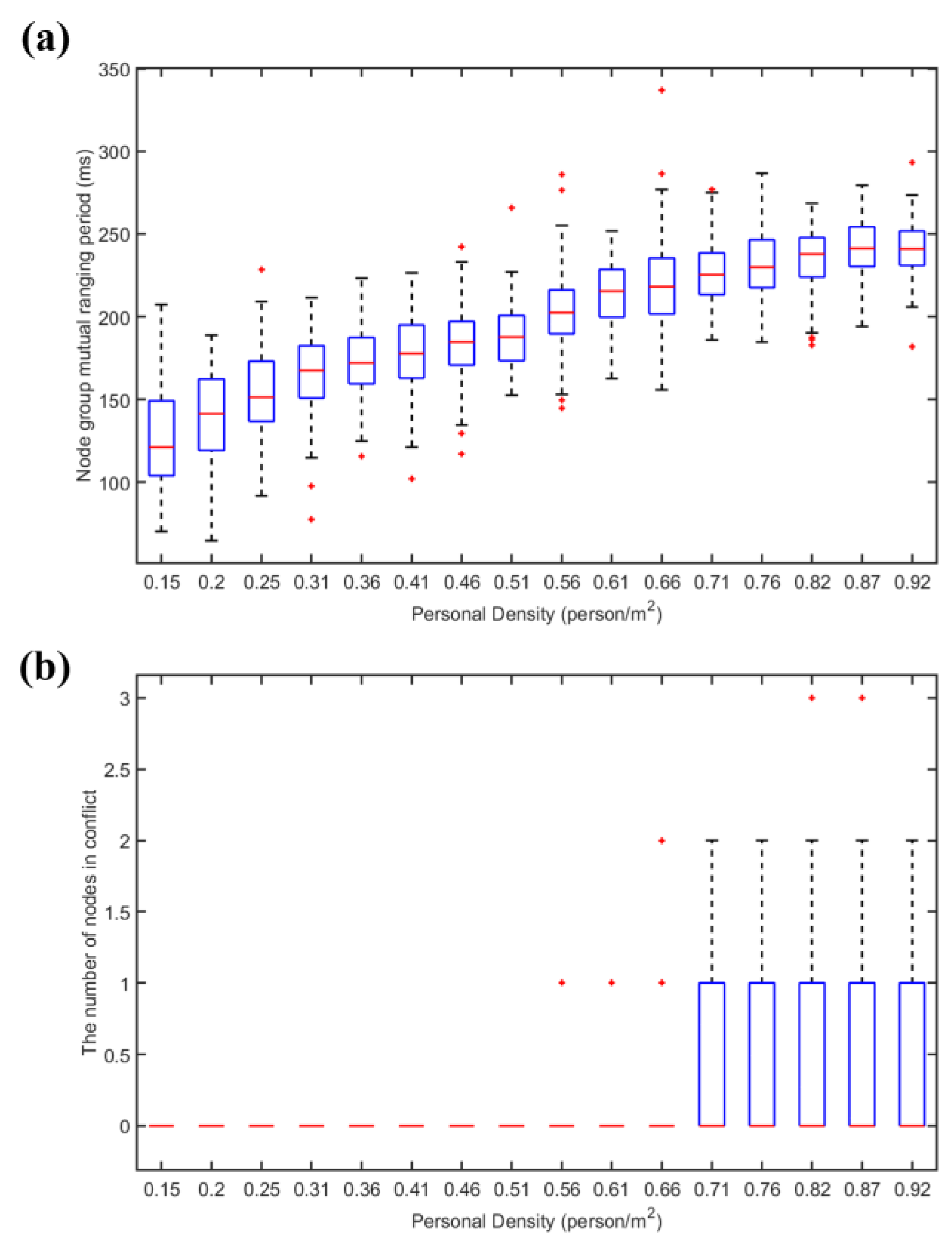
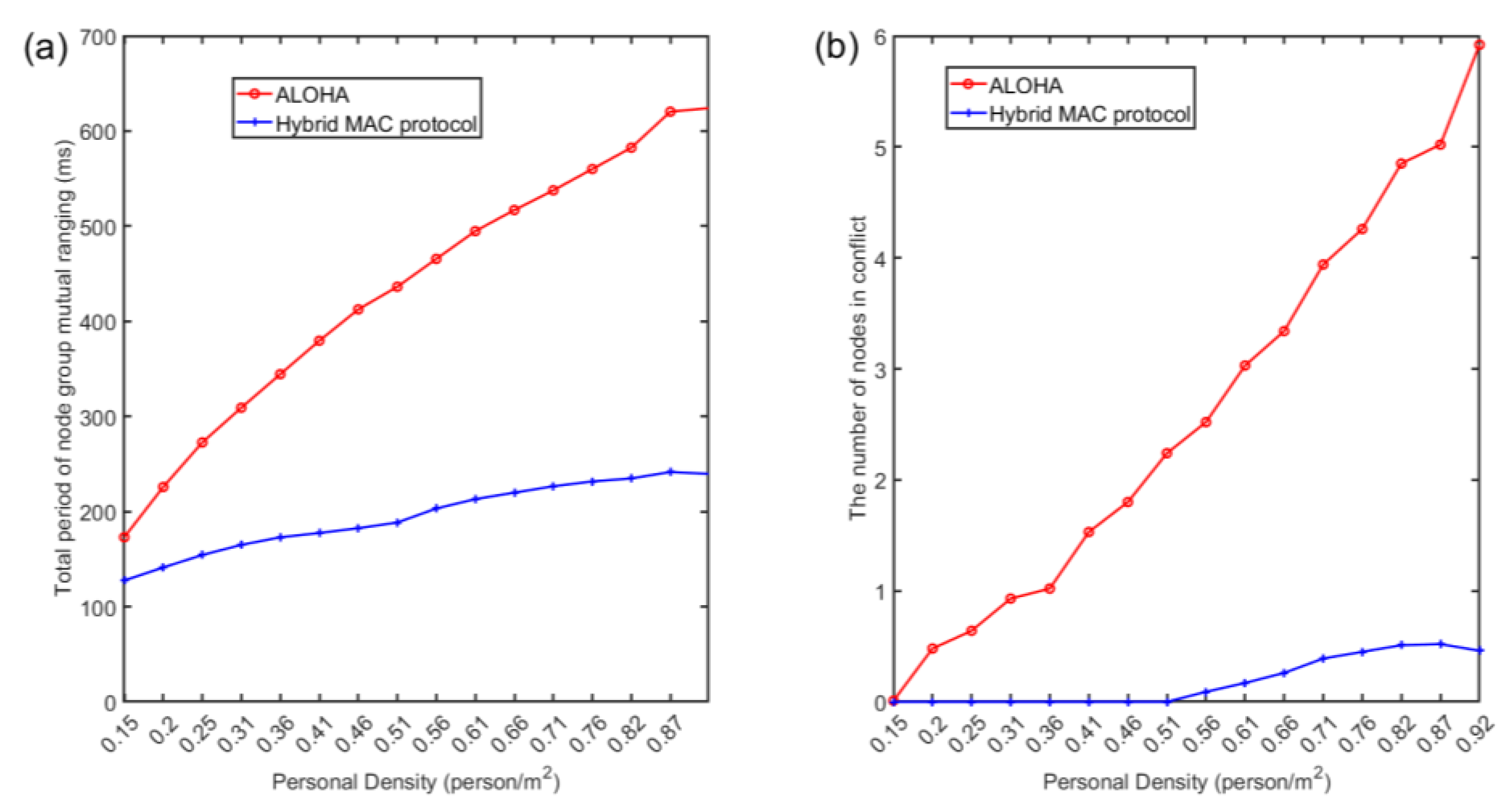
5.4. MAC Simulation
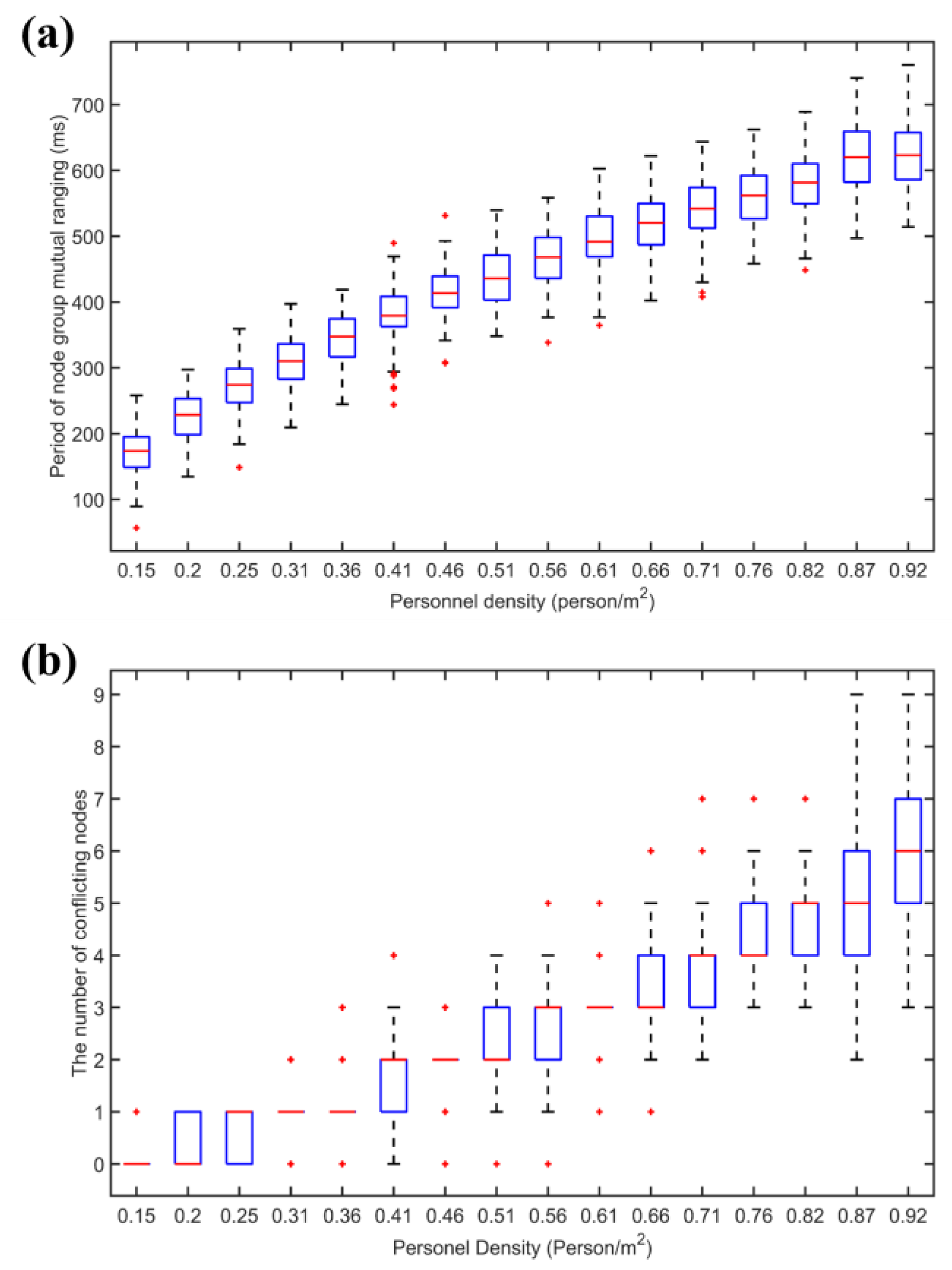
- As the density of nodes (personnel) increases, it takes longer for node clusters to complete a round of mutual ranging under the three channel access protocols;
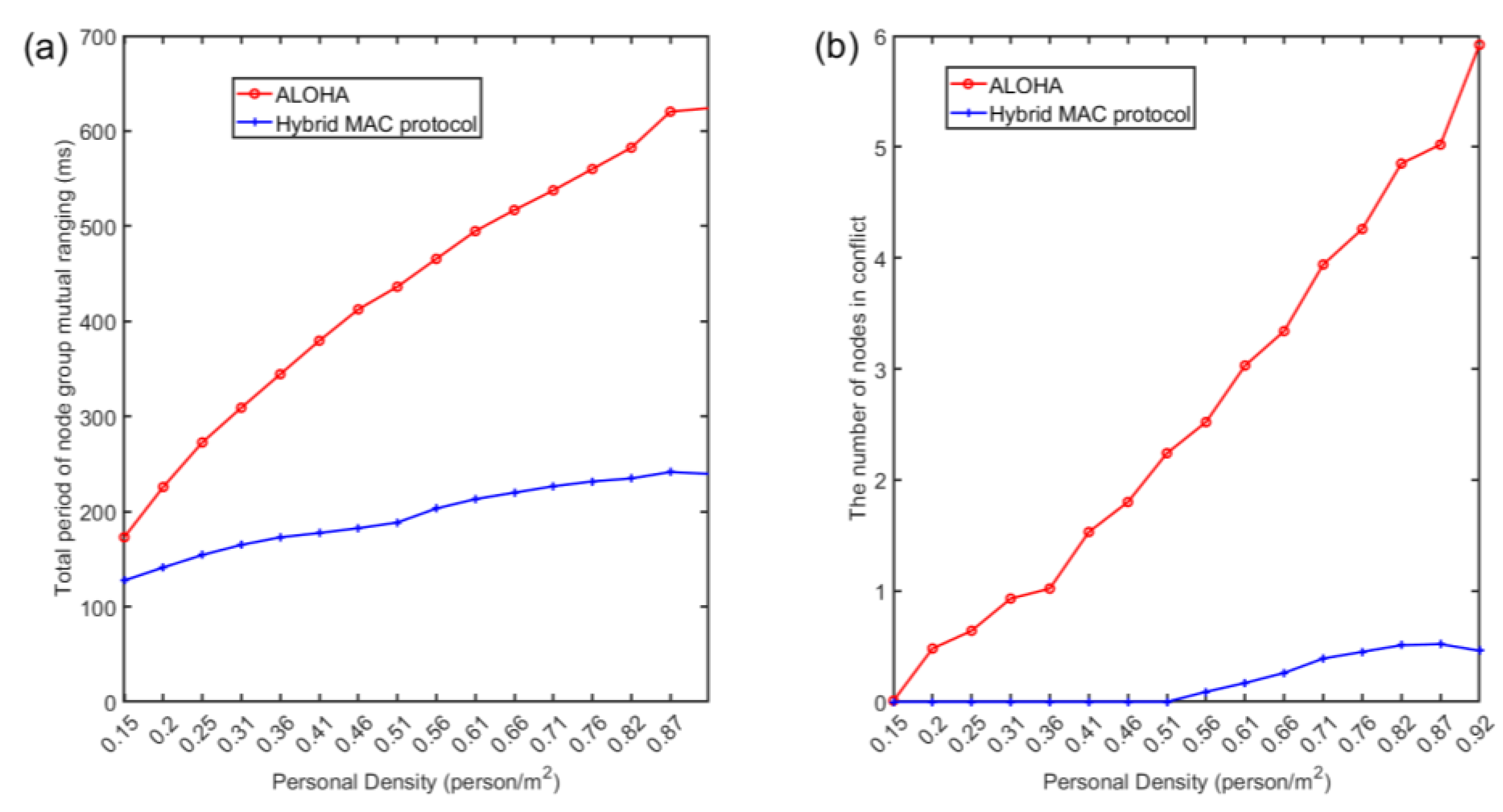
- Compared with competitive channel access, the hybrid channel access protocol proposed in this paper greatly shortens the total period of node cluster mutual ranging and can complete the task of mutual ranging in a shorter time, which is good for dealing with crowds. The characteristics of the topology structure change over time, and this improvement is more obvious at higher node densities;
- Compared with the competitive channel access, the hybrid channel access also greatly reduces the collision probability under the same node density, and the advantage is more obvious when the node density is larger. Among them, under the hybrid access mode, the number of conflicting nodes within 10 nodes (corresponding to a node density of 0.51 people/m2) is 0. Because there are 10 pseudo-orthogonal sub-channels in total, when assigning customized signals to nodes, the pseudo-orthogonal signals (pseudo-orthogonal of signals in different frequency bands and pseudo-orthogonal between Chirp BOKs) are preferentially selected.
6. Conclusions
- A high-precision mutual ranging and coding (ID identification) method with limited bandwidth is proposed, which improves the refresh rate and accuracy of social distance detection from the aspects of signal design and delay estimation method, respectively;
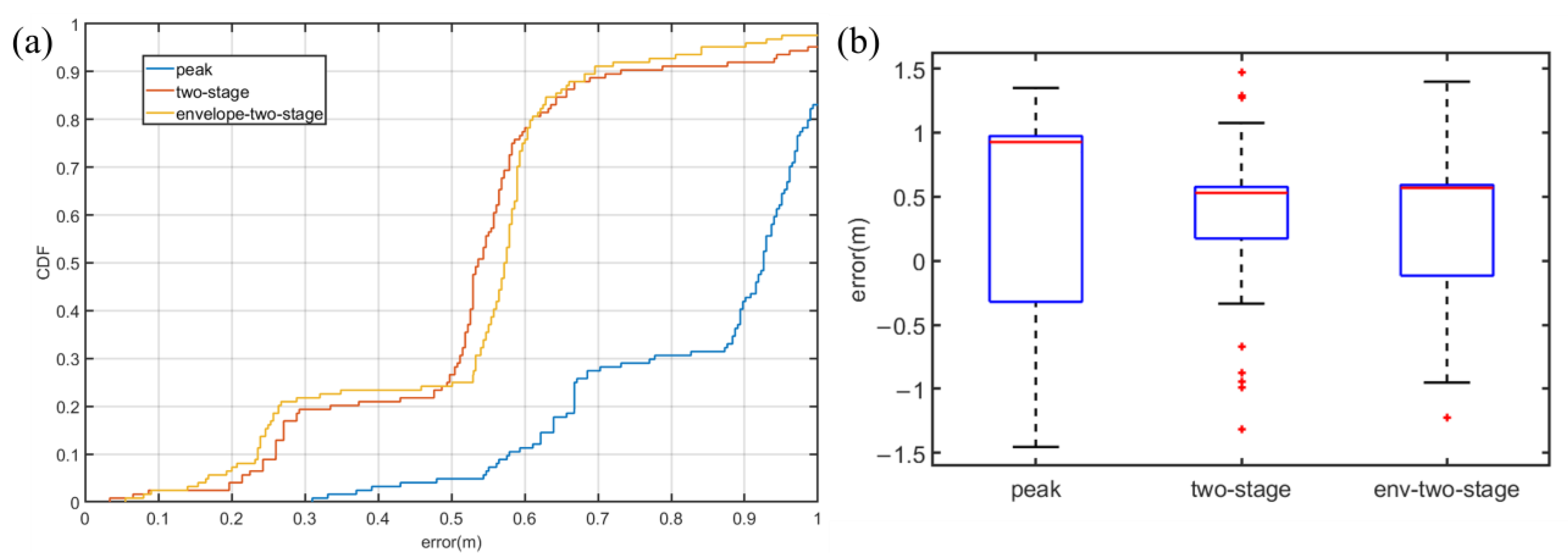
- A robust mutual ranging algorithm env-two-stage is designed, which combines cubic interpolation and two-stage method. Experiment results show that in the case of LoS, 95% of the mutual ranging error within 5 m is less than 10 cm. In the case of NLoS, the proposed algorithm has a better performance than contrast algorithms;
- A hybrid channel access protocol is analyzed, which makes full use of the pseudo-orthogonality of the signal and combines Chirp BOK, FDMA, and CSMA/CA, increasing the number of concurrencies and reducing the probability of collision. Simulation results show that the proposed hybrid channel access protocol solves the problem of high collision probability caused by long acoustic signal propagation delay, and the total ranging period and collision probability are lower than the ordinary CSMA/CA method;
- In conclusion, this study utilizes smartphone-based near-ultrasonic signals to realize robust social distance detection. The introduction of the system proposed can increase the accuracy of distance detection and refresh rate. We have achieved an accurate and high-refresh-rate mutual ranging system, the most robust ever reported in the literature.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kissler, S.M.; Tedijanto, C.; Goldstein, E.; Grad, Y.H.; Lipsitch, M. Projecting the transmission dynamics of SARS-CoV-2 through the postpandemic period. Science 2020, 368, 860–868. [Google Scholar] [CrossRef] [PubMed]
- Guan, W.; Zhong, N. Strategies for reopening in the forthcoming COVID-19 era in China. Natl. Sci. Rev. 2022, 9, c54. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez, P.; Grana, S.; Alvarez-Leon, E.E.; Battaglini, M.; Darias, F.J.; Hernan, M.A.; Lopez, R.; Llaneza, P.; Martin, M.C.; Ramirez-Rubio, O.; et al. A population-based controlled experiment assessing the epidemiological impact of digital contact tracing. Nat. Commun. 2021, 12, 587. [Google Scholar] [CrossRef] [PubMed]
- Lunn, P.D.; Timmons, S.; Belton, C.A.; Barjaková, M.; Julienne, H.; Lavin, C. Motivating social distancing during the Covid-19 pandemic: An online experiment. Soc. Sci. Med. 2020, 265, 113478. [Google Scholar] [CrossRef] [PubMed]
- Rashid, M.T.; Wang, D. CovidSens: A vision on reliable social sensing for COVID-19. Artif. Intell. Rev. 2021, 54, 1–25. [Google Scholar] [CrossRef]
- Abouk, R.; Heydari, B. The immediate effect of COVID-19 policies on social-distancing behavior in the United States. Public Health Rep. 2021, 136, 245–252. [Google Scholar] [CrossRef]
- Adiyoso, W. Social distancing intentions to reduce the spread of COVID-19: The extended theory of planned behavior. BMC Public Health 2021, 21, 1863. [Google Scholar] [CrossRef]
- Maccari, L.; Cagno, V. Do we need a contact tracing app? Comput. Commun. 2021, 166, 9–18. [Google Scholar] [CrossRef]
- Prather, K.A.; Wang, C.C.; Schooley, R.T. Reducing transmission of SARS-CoV-2. Science 2020, 368, 1422–1424. [Google Scholar] [CrossRef]
- China Publishes White Paper on Fight against COVID-19 (Full Text). Available online: http://en.nhc.gov.cn/2020-06/08/c_80724.htm (accessed on 3 August 2022).
- Zangenehnejad, F.; Gao, Y. GNSS smartphones positioning: Advances, challenges, opportunities, and future perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef]
- Atroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Cabani, A.; Chafouk, H. A Survey of Recent Indoor Localization Scenarios and Methodologies. Sensors 2021, 21, 8086. [Google Scholar] [CrossRef] [PubMed]
- Peng, C.Y.; Shen, G.B.; Zhang, Y.G. BeepBeep: A High-Accuracy Acoustic-Based System for Ranging and Localization Using COTS Devices. ACM Trans. Embed. Comput. Syst. 2012, 11, 1–29. [Google Scholar] [CrossRef]
- Liu, B.H.; Otis, B.P.; Challa, S.; Axon, P.; Chou, C.T.; Jha, S.K. The impact of fading and shadowing on the network performance of wireless sensor networks. Int. J. Sen. Netw. 2008, 3, 211–223. [Google Scholar] [CrossRef]
- Tao, Y.; Zhao, L. AIPS: An Accurate Indoor Positioning System With Fingerprint Map Adaptation. IEEE Internet Things J. 2022, 9, 3062–3073. [Google Scholar] [CrossRef]
- Ma, C.; Wu, B.; Poslad, S.; Selviah, D.R. Wi-Fi RTT Ranging Performance Characterization and Positioning System Design. IEEE Trans. Mob. Comput. 2022, 21, 740–756. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H. Device-Free Tracking via Joint Velocity and AOA Estimation With Commodity WiFi. IEEE Sens. J. 2019, 19, 10662–10673. [Google Scholar] [CrossRef]
- Jiang, Z.; Luan, T.H.; Ren, X.; Lv, D.; Hao, H.; Wang, J.; Zhao, K.; Xi, W.; Xu, Y.; Li, R. Eliminating the Barriers: Demystifying Wi-Fi Baseband Design and Introducing the PicoScenes Wi-Fi Sensing Platform. IEEE Internet Things J. 2022, 9, 4476–4496. [Google Scholar] [CrossRef]
- Leith, D.J.; Farrell, S. Google/Apple Exposure Notification Due Diligence. In Proceedings of the Innovative Secure IT Technologies against COVID-19 Workshop, Online, 21 February 2021. [Google Scholar]
- Michael, K.; Abbas, R. Behind COVID-19 Contact Trace Apps: The Google-Apple Partnership. IEEE Consum. Electron. Mag. 2020, 9, 71–76. [Google Scholar] [CrossRef]
- Leith, D.J.; Farrell, S. Coronavirus contact tracing. ACM SIGCOMM Comp. Com. 2020, 50, 66–74. [Google Scholar] [CrossRef]
- Chen, L.; Kuusniemi, H.; Chen, Y.; Liu, J.; Pei, L.; Ruotsalainen, L.; Chen, R. Constraint Kalman filter for indoor bluetooth localization. In Proceedings of the 2015 23rd European Signal Processing Conference (EUSIPCO), Nice, France, 31 August–4 September 2015; pp. 1915–1919. [Google Scholar]
- Suryavanshi, N.B.; Reddy, K.V.; Chandrika, V.R. Direction Finding Capability in Bluetooth 5.1 Standard. In Proceedings of the Second EAI International Conference, Bangalore, India, 8–10 February 2019; pp. 53–65. [Google Scholar]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone Inertial Sensor-Based Indoor Localization and Tracking with iBeacon Corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Ham, M.; Zlatanova, S.; Verbree, E.; Voûte, R. Real Time Localization of Assets in Hospitals Using Quuppa Indoor Positioning Technology. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 12, 105–110. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Zhiming, C.; Yuanjin, Z. A CMOS low-power variable-gain amplifier with RSSI for a noncoherent low data rate IR-UWB receiver. In Proceedings of the 2009 12th International Symposium on Integrated Circuits, Singapore, 14–16 December 2009; pp. 425–428. [Google Scholar]
- Bottigliero, S.; Milanesio, D.; Saccani, M.; Maggiora, R. A Low-Cost Indoor Real-Time Locating System Based on TDOA Estimation of UWB Pulse Sequences. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Bocquet, M.; Loyez, C.; Benlarbi-Delai, A. Using enhanced-TDOA measurement for indoor positioning. IEEE Microw. Wirel. Co. 2005, 15, 612–614. [Google Scholar] [CrossRef]
- Wang, S.; Mao, G.; Zhang, J.A. Joint Time-of-Arrival Estimation for Coherent UWB Ranging in Multipath Environment with Multi-User Interference. IEEE Trans. Signal Proces. 2019, 67, 3743–3755. [Google Scholar] [CrossRef]
- Schmid, L.; Salido-Monzú, D.; Wieser, A. Accuracy Assessment and Learned Error Mitigation of UWB ToF Ranging. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]
- Etzlinger, B.; Nusbaummuller, B.; Peterseil, P.; Hummel, K.A. Distance Estimation for BLE-based Contact Tracing-A Measurement Study. In Proceedings of the 2021 Wireless Days (WD), Paris, France, 30 June–2 July 2021; pp. 1–5. [Google Scholar]
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Wu, X.; Soltani, M.D.; Zhou, L.; Safari, M.; Haas, H. Hybrid LiFi and WiFi Networks: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 1398–1420. [Google Scholar] [CrossRef]
- Gualda, D.; Pérez-Rubio, C.; Ureña, J.; Pérez-Bachiller, S.; Villadangos, J.M.; Hernández, Á.; García, J.; Jiménez Martín, A. LOCATE-US: Indoor Positioning for Mobile Devices Using Encoded Ultrasonic Signals, Inertial Sensors and Graph-Matching. Sensors 2021, 21, 1950. [Google Scholar] [CrossRef]
- Lopes, S.I.; Vieira, J.M.; Albuquerque, D.; Carvalho, N.B. Accurate smartphone indoor positioning using a WSN infrastructure and non-invasive audio for TDoA estimation. Pervasive Mob. Comput. 2015, 20, 29–46. [Google Scholar] [CrossRef]
- Graham, D.; Novak, E.; Zhou, G.; Buffkin, J. A Smartphone Compatible SONAR Ranging Attachment for 2-D Mapping. IEEE Internet Things J. 2016, 3, 779–786. [Google Scholar] [CrossRef]
- Mao, W.; He, J.; Qiu, L. CAT: High-precision acoustic motion tracking. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016. [Google Scholar]
- Cao, S.; Chen, X.; Zhang, X.; Chen, X. Effective Audio Signal Arrival Time Detection Algorithm for Realization of Robust Acoustic Indoor Positioning. IEEE Trans. Instrum. Meas. 2020, 69, 7341–7352. [Google Scholar] [CrossRef]
- Chen, R.; Li, Z.; Ye, F.; Guo, G.; Xu, S.; Qian, L.; Liu, Z.; Huang, L. Precise Indoor Positioning Based on Acoustic Ranging in Smartphone. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, M.; Wang, X.; Wang, Z. TOA Estimation of Chirp Signal in Dense Multipath Environment for Low-Cost Acoustic Ranging. IEEE Trans. Instrum. Meas. 2019, 68, 355–367. [Google Scholar] [CrossRef]
- Lee, H.; Kim, T.H.; Choi, J.W.; Choi, S. Chirp signal-based aerial acoustic communication for smart devices. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 2407–2415. [Google Scholar]
- Rupapara, V.; Narra, M.; Gunda, N.K.; Gandhi, S.; Thipparthy, K.R. Maintaining Social Distancing in Pandemic Using Smartphones with Acoustic Waves. IEEE Trans. Comput. Soc. Syst. 2022, 9, 605–611. [Google Scholar] [CrossRef]
- Shan, F.; Zeng, J.; Li, Z.; Luo, J.; Wu, W. Ultra-Wideband Swarm Ranging. In Proceedings of the IEEE INFOCOM 2021-IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10 May 2021; pp. 1–10. [Google Scholar]
- Terhardt, E. Calculating virtual pitch. Hearing Res. 1979, 1, 155–182. [Google Scholar] [CrossRef]
- Yuan, F.; Wei, Q.; Cheng, E. Multiuser chirp modulation for underwater acoustic channel based on VTRM. Int. J. Nav. Arch. Ocean 2017, 9, 256–265. [Google Scholar] [CrossRef]
- Hassab, J.; Boucher, R. Optimum estimation of time delay by a generalized correlator. IEEE Trans. Acoust. Speech Signal Process. 1979, 27, 373–380. [Google Scholar] [CrossRef]
- Misra, P.K.; Ostry, D.; Kottege, N.; Jha, S. TWEET: An envelope detection based broadband ultrasonic ranging system. In Proceedings of the 14th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Miami, FL, USA, 31 October–4 November 2011; pp. 409–416. [Google Scholar]
- Ozaktas, H.; Arikan, O.; Kutay, M.; Bozdagt, G. Digital computation of the fractional Fourier transform. IEEE Trans. Signal Proces. 1996, 44, 2141–2150. [Google Scholar] [CrossRef]
- Yuan, F.; Jia, Z.; Cheng, E. Chirp-rate quasi-orthogonality based DSSS-CDMA system for underwater acoustic channel. Appl. Acoust. 2020, 161, 107163. [Google Scholar] [CrossRef]
- Wu, L.; Sun, P.; Wang, Z.; Yang, Y.; Wang, Z. Temporal Correlation Enhanced Multiuser Detection for Uplink Grant-Free NOMA. IEEE Trans. Mob. Comput. 2021, 1, 1. [Google Scholar] [CrossRef]
- Khyam, M.O.; Noor-A-Rahim, M.; Li, X.; Ritz, C.; Guan, Y.L.; Ge, S.S. Design of chirp waveforms for multiple-access ultrasonic indoor positioning. IEEE Sens. J. 2018, 18, 6375–6390. [Google Scholar] [CrossRef]
- Liu, Q.; Lu, Y.; Hu, G.; Lv, S.; Wang, X.; Zhou, X. Cooperative control feedback: On backoff misbehavior of CSMA/CA MAC in channel-hopping cognitive radio networks. J. Commun. Netw.-S. Kor. 2018, 20, 523–535. [Google Scholar] [CrossRef]
- Luu, G.; Ravier, P.; Buttelli, O. The generalized correlation methods for estimation of time delay with application to electromyography. In Proceedings of the 1st International Symposium on Engineering Physics and Mechanics (ISEPM), Pune, India, 25–26 October 2011; pp. 1–6. [Google Scholar]
- Meng, L.; Li, X.-H.; Zhang, W.-G.; Liu, D.-Z. The Generalized Cross-Correlation Method for Time Delay Estimation of Infrasound Signal. In Proceedings of the 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Singapore, 18–20 September 2015; pp. 1320–1323. [Google Scholar]
- Gabbrielli, A.; Xiong, W.; Schott, D.J.; Fischer, G.; Wendeberg, J.; Hoflinger, F.; Reindl, L.M.; Schindelhauer, C.; Rupitsch, S.J. An Echo Suppression Delay Estimator for Angle-of-Arrival Ultrasonic Indoor Localization. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Accuracy (m) | Range (m) | Cost | Smartphone Compatibility | BS Requirement |
|---|---|---|---|---|---|
| Wi-Fi RTT | 0.05~0.20 | 20 | High | Compatible | Yes |
| Wi-Fi RSSI | 3~8 | Low | Compatible | Yes | |
| BLE RSSI | 2~5 | 10 | Low | Compatible | Yes |
| BLE AOA | 0.05~0.50 | High | Compatible | Yes | |
| BLE Ibeacon | 0.05~0.10 | 1~2 | Low | Compatible | No |
| UWB | 0.05~0.30 | 50 | High | Mostly Incompatible | Yes |
| PDR | 1.62 | / | Low | Compatible | No |
| Acoustic | 0.1 | 40 | Low | Compatible | No |
| Parameter | Value |
|---|---|
| Diagram of border circle | 5 m |
| Personal (node) number | 3~18 |
| Personal (node) density | 0.15/m2~0.92/m2 |
| Minimum personal distance | 0.8 m |
| Maximum personal distance | 5 m |
| Signal length | 20 ms |
| 14.58 ms | |
| System time delay | 5 ms |
| IFS | |
| Competition window | 8 |
| Simulation step | 0.1 mm |
| Speed of sound | 343 m/s |
| CSMA | P-resist (P = 0.8) |
| Environment Setting | Method | Operational Range | Avd (m) | Std (m) | 50% CDF (m) | 95% CDF (m) |
|---|---|---|---|---|---|---|
| Case 1 | Peak | 1 m | 0.0269 | 0.0190 | 0.0190 | 0.0650 |
| Case 1 | two-stage | 1 m | 0.0269 | 0.0304 | 0.0190 | 0.0650 |
| Case 1 | env-two-stage | 1 m | 0.0333 | 0.0133 | 0.0331 | 0.0544 |
| Case 1 | Peak | 2 m | 0.0948 | 0.0225 | 0.0946 | 0.2103 |
| Case 1 | two-stage | 2 m | 0.1038 | 0.0804 | 0.0662 | 0.3031 |
| Case 1 | env-two-stage | 2 m | 0.0776 | 0.0164 | 0.0786 | 0.1041 |
| Case 1 | Peak | 3 m | 0.0281 | 0.0214 | 0.0281 | 0.0640 |
| Case 1 | two-stage | 3 m | 0.0292 | 0.0315 | 0.0285 | 0.0640 |
| Case 1 | env-two-stage | 3 m | 0.0257 | 0.0180 | 0.0215 | 0.0604 |
| Case 1 | Peak | 4 m | 0.0279 | 0.0193 | 0.0198 | 0.0617 |
| Case 1 | two-stage | 4 m | 0.0283 | 0.0319 | 0.0156 | 0.0765 |
| Case 1 | env-two-stage | 4 m | 0.0163 | 0.0126 | 0.0156 | 0.0385 |
| Case 1 | Peak | 5 m | 0.0614 | 0.0426 | 0.0594 | 0.1515 |
| Case 1 | two-stage | 5 m | 0.0641 | 0.0668 | 0.0594 | 0.1525 |
| Case 1 | env-two-stage | 5 m | 0.0597 | 0.0351 | 0.0558 | 0.1196 |
| Case 2 | Peak | 3 m | 0.4113 | 0.1551 | 0.4096 | 0.8041 |
| Case 2 | two-stage | 3 m | 0.2316 | 0.1729 | 0.3866 | 0.5109 |
| Case 2 | env-two-stage | 3 m | 0.2060 | 0.1753 | 0.3600 | 0.4648 |
| Case 3 | Peak | 1.5 m | 0.8565 | 0.1946 | 0.9260 | 1.056 |
| Case 3 | two-stage | 1.5 m | 0.5618 | 0.2349 | 0.5364 | 1.009 |
| Case 3 | env-two-stage | 1.5 m | 0.5322 | 0.2140 | 0.5736 | 0.8591 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, N.; Shu, H.; Wang, X.; Xu, B.; Xi, Y.; Xue, C.; Liu, Y.; Wang, Z. Smartphone-Based Social Distance Detection Technology with Near-Ultrasonic Signal. Sensors 2022, 22, 7345. https://doi.org/10.3390/s22197345
Jia N, Shu H, Wang X, Xu B, Xi Y, Xue C, Liu Y, Wang Z. Smartphone-Based Social Distance Detection Technology with Near-Ultrasonic Signal. Sensors. 2022; 22(19):7345. https://doi.org/10.3390/s22197345
Chicago/Turabian StyleJia, Naizheng, Haoran Shu, Xinheng Wang, Bowen Xu, Yuzhang Xi, Can Xue, Youming Liu, and Zhi Wang. 2022. "Smartphone-Based Social Distance Detection Technology with Near-Ultrasonic Signal" Sensors 22, no. 19: 7345. https://doi.org/10.3390/s22197345
APA StyleJia, N., Shu, H., Wang, X., Xu, B., Xi, Y., Xue, C., Liu, Y., & Wang, Z. (2022). Smartphone-Based Social Distance Detection Technology with Near-Ultrasonic Signal. Sensors, 22(19), 7345. https://doi.org/10.3390/s22197345