1. Introduction
As one of the key components of the Fourth Industrial Revolution (Industry 4.0) and the Industrial Internet of Things (IIoT) [
1], IEEE 802.15.4-based Industrial Wireless Sensor Networks (IWSN) are a promising paradigm for smart industrial automation, due to their advantages of flexibility, low deployment costs and self-organising capabilities. They can potentially significantly improve industrial efficiency and productivity at sites such as oil refineries, steel mills, and chemical plants [
2]. WirelessHART, ISA 100.11a, and WIA-PA are the three major industrial communication standards designed for Process Automation (PA) in IWSN applications. As they are intended for industrial automation, they have stringent requirements with regard to communication reliability, balance of energy consumption and end-to-end transmission time [
1,
2]. A typical IWSN infrastructure based on IEEE 802.15.4 operating in the 2.4 GHz ISM band consists of battery-powered wireless sensor nodes connected through various Access Points (APs) to a gateway as a local destination [
2,
3]. The Gateway
establishes a connection with the network control system for the plant automation, which is referred to as the Network Manager (NM). The NM is accountable for network configuration, communication scheduling between network devices, routing management, and system health monitoring and reporting [
2]. Centralisation of the IWSN allows better control of network operations and reduces the cost of devices [
4].
Routing is an essential task of the NM, and the routes it builds are key to the goals of reliability, latency and balanced energy consumption [
2,
4]. All IWSN standards specify routing algorithms of two types, Source Routing (SR) and Graph Routing (GR), of which the latter is the more widely used and is exclusively considered herein. GR employs a first-path approach with path redundancy, to transmit data packets from a source node to a
[
2,
5]. There are, however, some challenges, as outlined below.
Firstly, industrial environments often generate high levels of noise which may lead to a decline in performance of the routing algorithm [
6]. However, the reliability of wireless communication can be improved using multi-channel Time Division Multiple Access (TDMA) and channel hopping. Where sufficient reliability cannot be achieved by the MAC layer [
7], redundant routes can be applied by the GR algorithm at the network layer [
2]. Retransmission is an effective method for increasing reliability, but it also increases end-to-end transmission time [
8].
Secondly, industrial automation imposes stringent end-to-end delay requirements on data communication. Such delays are increased further by conflicts between transmissions where two paths share a sensor node (sender or receiver) [
9]. IWSNs do not permit multiple transmissions to take place simultaneously on the same channel; hence, a channel can only support one transmission at a time across the network. A conflict delay occurs when a data packet is delayed because it conflicts with another data packet that is scheduled in the current time slot [
9].
Lastly, the workload of sensor nodes around a
must also be considered since, due to centralisation in IWSNs, nodes closer to the
are often overburdened with high traffic loads as compared to those further away. This is because packets from the entire region are forwarded through the former to reach the
, leading to an imbalance in energy consumption that reduces the life-time of the network [
8].
When designing the best path for a routing algorithm for IWSN, all of these challenges must, hence, be addressed through striking a balance between them. For example, when monitoring systems are used in the industrial domain, sensor nodes with limited power are used in real-world IWSN. This includes monitoring of nuclear plants and furnaces, which could be dangerous applications. Multiple functions may be carried out by sensor nodes. For example, in a temperature monitoring system, the alerting objective is essentially non-critical; however, if the monitored temperature exceeds a certain level, the alerting system may be required to function as a safety system, placing additional demands on the sensor nodes, particularly those near the gateway. As a result, balancing the energy consumption of sensor nodes, increasing communication reliability, and reducing delay are essential requirements of real-life IWSNs. However, these requirements can be relatively difficult to achieve due to interference and noise in industrial environments, which cause constant redundancy, high latency as a result of redundancy, and unbalanced energy consumption.
To address them adequately, optimisation or high-level procedure algorithms are required. The use of optimisation techniques for creating and selecting best paths in a centralised manner may thus be useful for IWSN and future IIoT protocols.
The main optimisation techniques currently used include Swarm Intelligence (SI), Evolution Strategies (ES), and physical-based algorithms [
10]. Optimisation techniques typically set an objective function to find the best solution subject to specific criteria [
10]. Path optimisation techniques thus play an important role in IWSN, as best routing can promote balanced energy consumption, reduced end-to-end transmission time, and improved network reliability [
11].
However, many traditional path optimisation methods are based on Dynamic Programming (DP), which uses a Breadth-First Search (BFS), and Dijkstra which only considers path length to find a best path [
5,
12,
13]. These traditional routing techniques are good for obtaining best solutions, but they each focus on just one requirement of IWSNs and ignore the rest. Dynamic programming is also difficult to link to complex routing problems [
10].
Nevertheless, previous research (e.g., [
10,
11]) has also shown that optimisation techniques are useful for finding the best routing in Wireless Sensor Networks (WSNs), of which IWSNs are a special case [
14]. The aim of these path optimisation techniques is to find reliable paths which are energy-efficient [
11] by creating an objective function to balance the predetermined requirements which, in the case of IWSNs, are energy consumption, communication reliability, and end-to-end transmission time [
14].
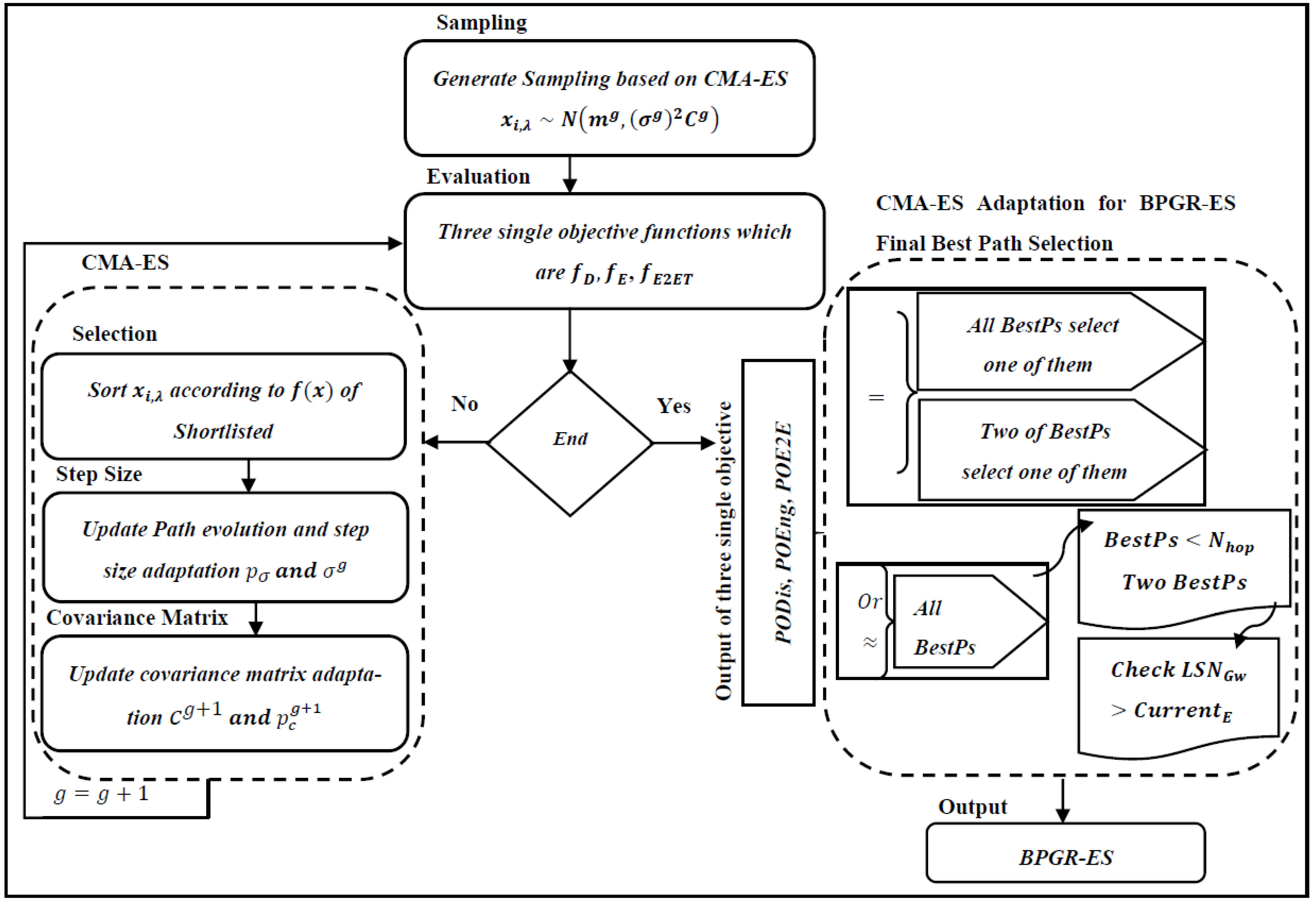
The main contribution of this research is the development of a graph routing algorithm of IWSNs based on a Covariance-Matrix Adaptation Evolution Strategy (CMA-ES) [
15]. To the best of our knowledge, this the first GR algorithm that specifically adopts evolution strategies to select best paths for IWSNs. This article’s GR algorithm focuses specifically on GR in WirelessHART networks. GR creates paths in a mesh topology, with path redundancy and multi-hop providing additional network reliability in industrial environments. CMA-ES was employed to select the best paths in this form of GR. This is a state-of-the-art optimisation technique in terms of evolutionary computation based on population methods. It has, therefore, been adopted as a standard tool for continuous optimisation in many research laboratories [
16] and industrial environments worldwide.
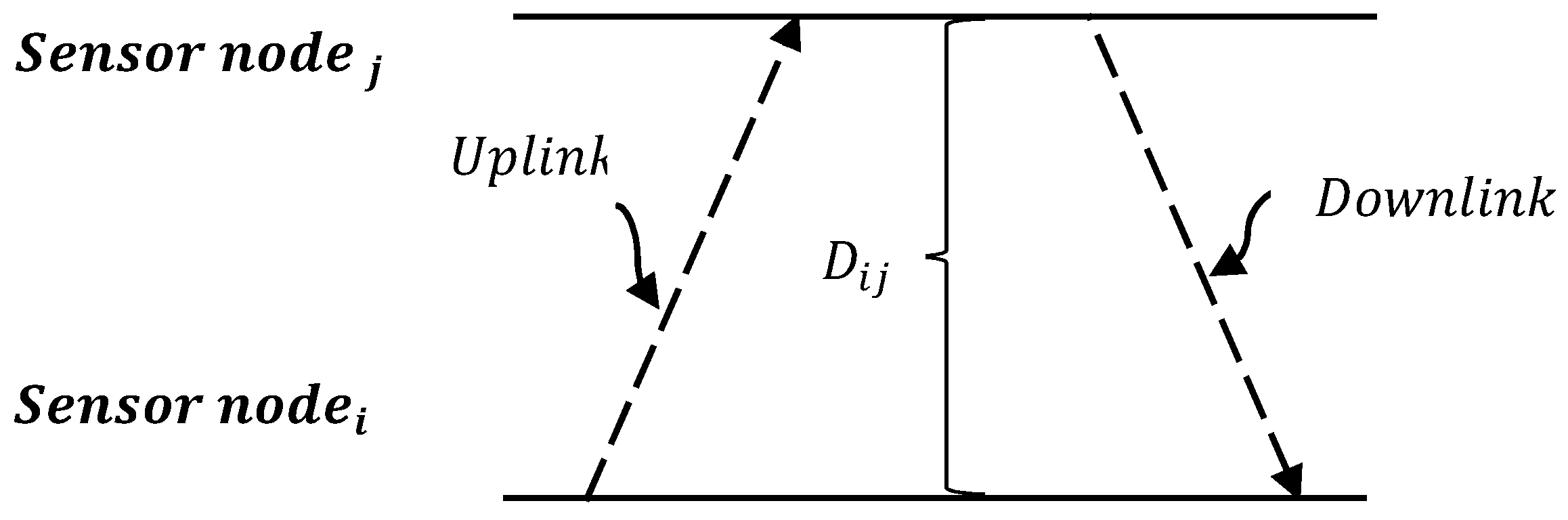
Firstly, the current research proposes three best paths of GR with single-objective functions, depending on the Euclidean distance between sensor nodes (which this article calls PODis), their residual energy (which this article calls POEng) and actual end-to-end transmission time for each data packet between the transmitter and receiver based on the propagation model in the WirelessHART network (called POE2E in this article). The best receiver node for each hop along the best paths of all objective functions is carefully chosen on the basis of a Shortlist, which retains a list of the neighbours of each sensor node within its effective communication range in the direction. As a result, this helps to reduce overheads on the network and the energy required to maintain live sensor nodes throughout the entire network.
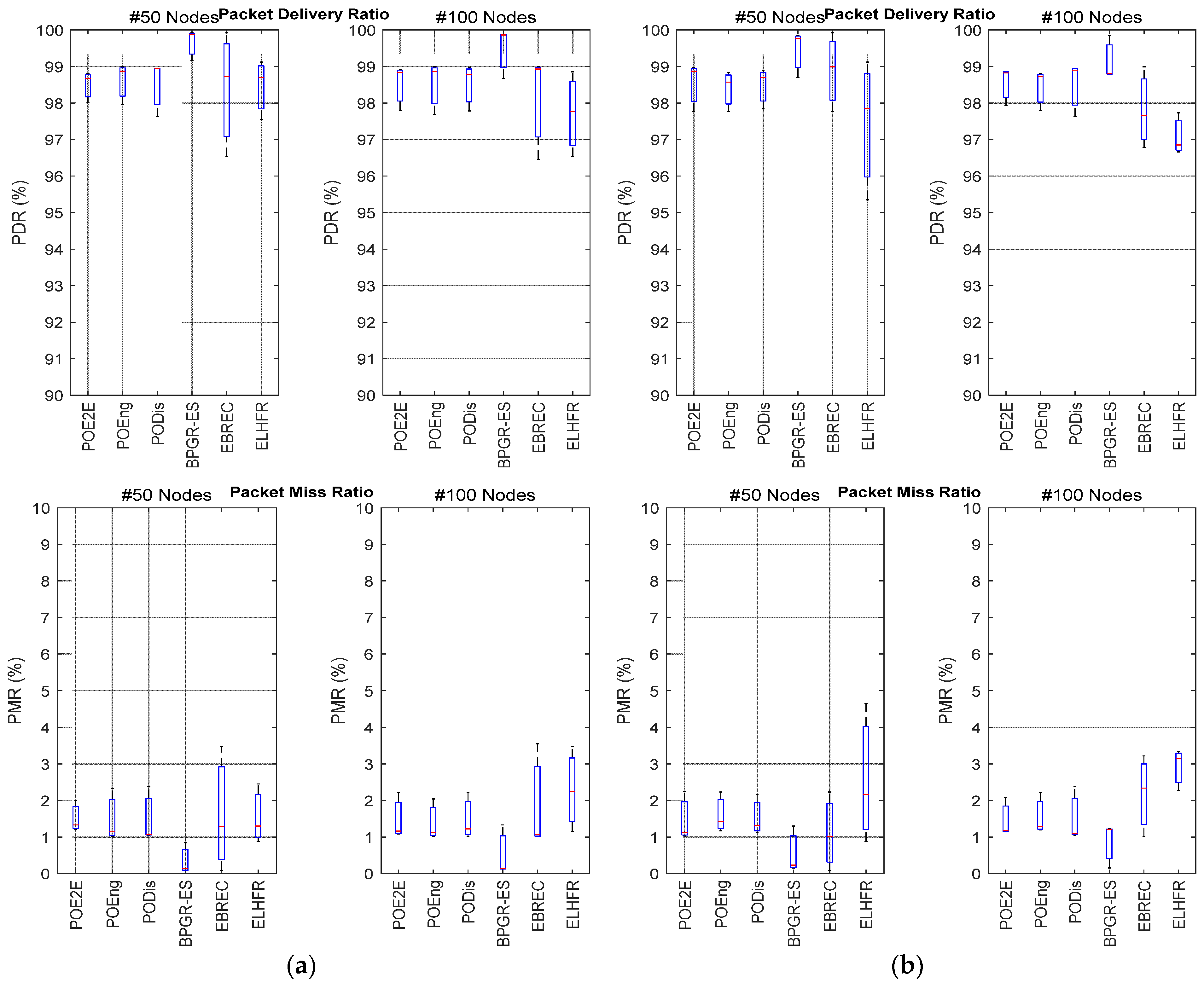
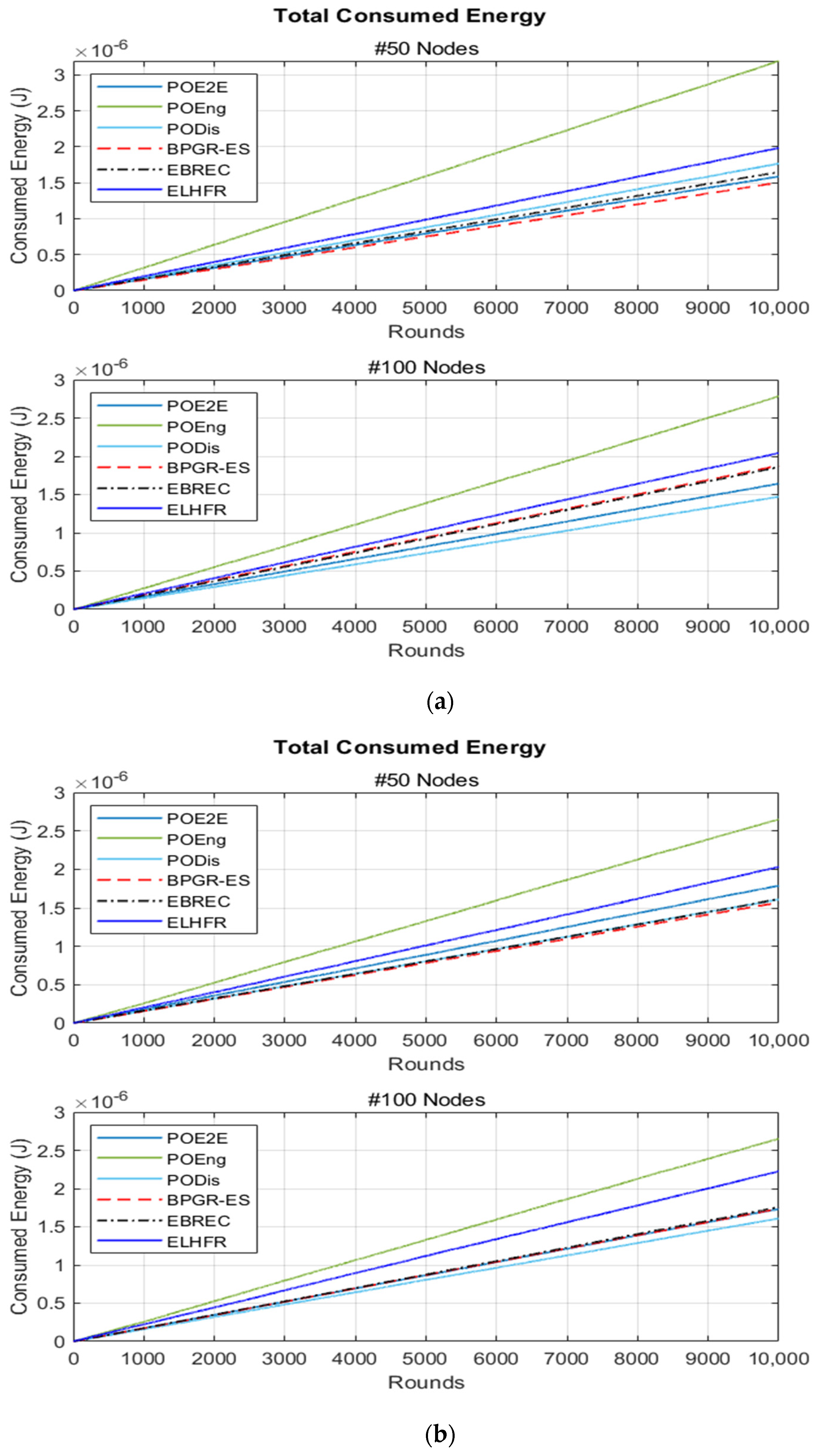
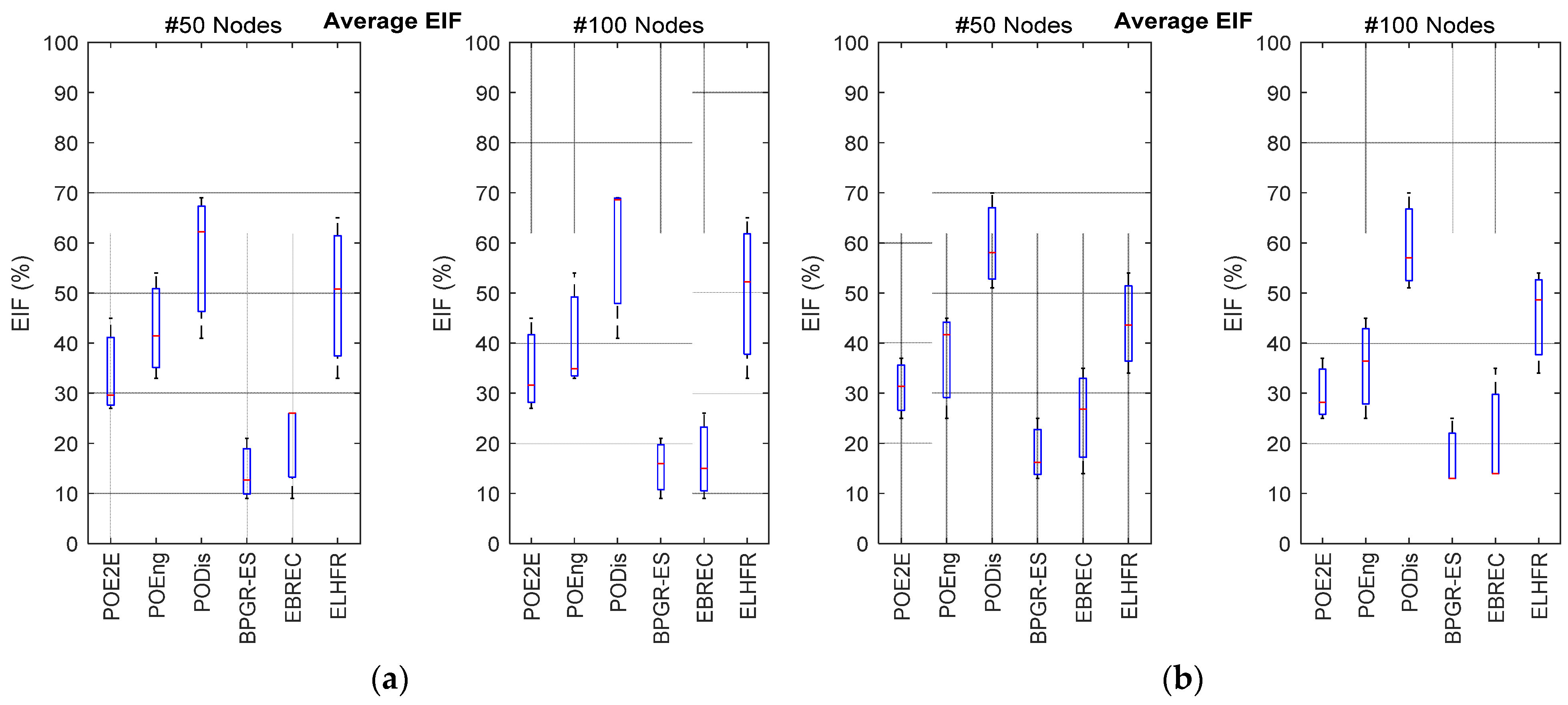
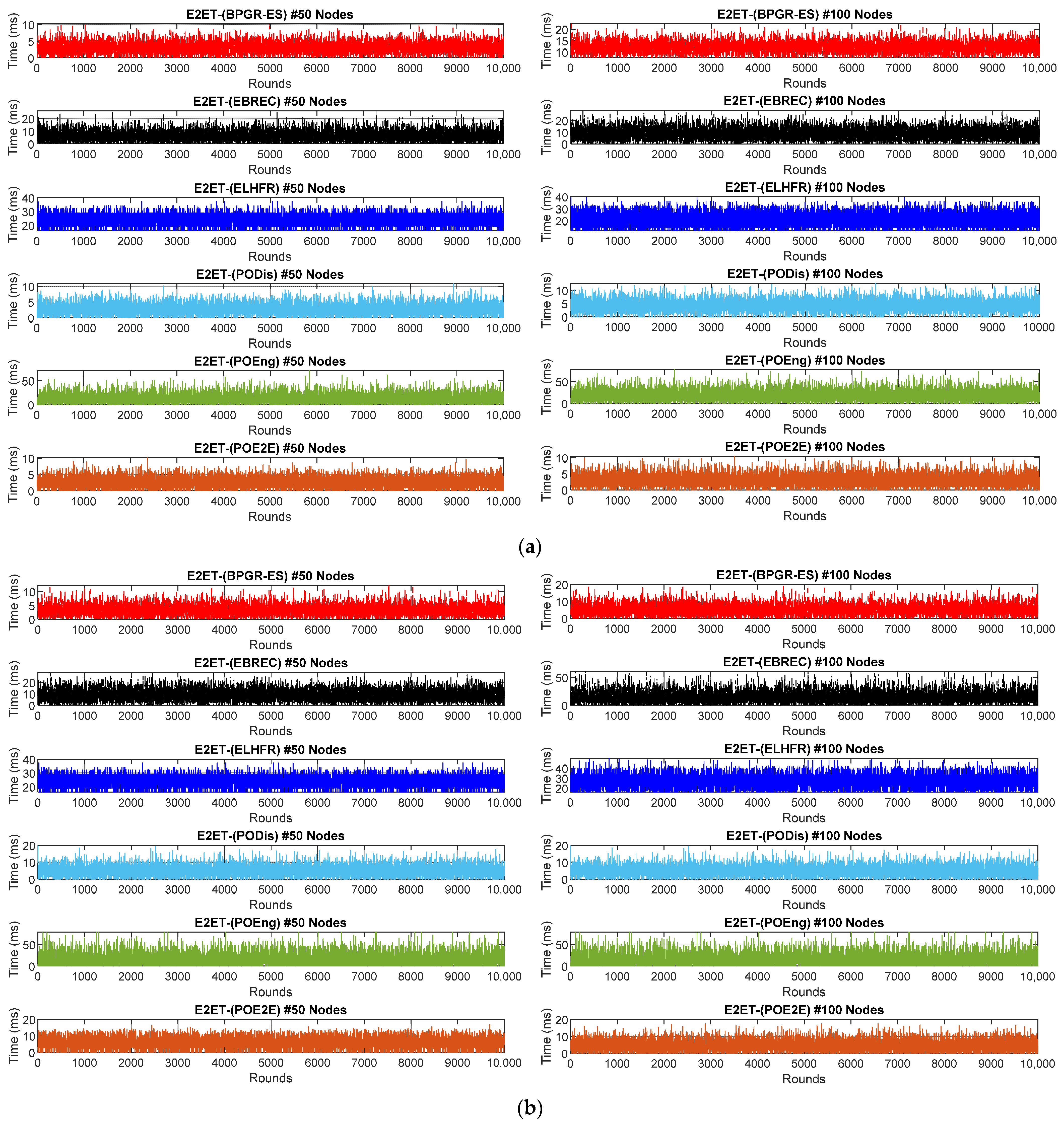
Secondly, after computing these objective functions, it is necessary to converge on the best solution by means of the proposed algorithm which we call best Path Graph Routing with CMA-ES (BPGR-ES), which uses multiple-objectives to select the final best path. This approach, which constitutes BPGR-ES, can be compared with best single-objective paths (PODis, POEng and POE2E) and existing uplink routing algorithms, using the following performance metrics: average Energy Imbalance Factor (EIF); Packet Delivery Ratio (PDR); Packet Miss Ratio (PMR); total consumed energy and End-to-End Transmission (E2ET).
The remainder of this article is structured as follows:
Section 2 presents the background and literature review, which includes an analysis of the state-of-the-art research on graph routing algorithms in IWSNs, optimisation techniques applied to state-of-the-art routing algorithms in wireless networks, and an overview of CMA-ES;
Section 3 provides a detailed description of the model of best paths for graph routing based on CMA-ES selection, which is the main focus of this research;
Section 4 presents the simulation setup and performance evaluation;
Section 5 concludes the article.
5. Conclusions and Future Work
This research adopts a Covariance-Matrix Adaptation Evolution Strategy (CMA-ES) to establish best paths of a graph routing algorithm for Industrial Wireless Sensor Networks (IWSNs) that also provide path redundancy. Firstly, this research proposed three best paths, each based on a single-objective function for CMA-ES according to the different performance requirements of IWSNs considered in this research: the best Path based on the Distance between sensor nodes in the direction of the gateway (PODis), the best Path based on residual Energy (POEng) and the best Path based on the End-to-End transmission time (POE2E). Secondly, this research proposes the best Path of Graph Routing-Evolution Strategy (BPGR-ES) algorithm, which selects the best hops on the basis of multiple objectives to achieve balanced energy consumption as well as a balance among IWSN requirements. This research has evaluated the three best single-objective paths (PODis, POEng and POE2E) and the best path with multiple objectives (BPGR-ES) across several different topologies in order to examine the total consumed energy, End-to-End Transmission (E2ET), average Energy Imbalance Factor (EIF), Packet Delivery Ratio (PDR) and Packet Miss Ratio (PMR).
The results revealed a reduction in E2ET across all topologies for the POE2ET algorithm. Additionally, the PDR values were good for all proposed approaches: 99.57%, 98.84%, 98.75% and 98.8% for BPGR-ES, PODis, POEng and POE2E, respectively. Despite the fact that total consumed energy for PODis outperformed BPGR-ES in small networks and that total consumed energy for BPGR-ES and EBREC was somewhat similar in dense networks, the BPGR-ES algorithm achieved an 87.73% better energy balance among all sensor nodes in the network in terms of average EIF. It is also noteworthy that all the best single-objective paths of GR did not achieve balanced energy consumption over a mesh topology. It is also noteworthy that all the best single-objective paths of GR did not achieve balanced energy consumption over a mesh topology. Future work will, therefore, strive to implement the best single-objective paths of GR with unequal clustering topology to evaluate its performance. Lastly, research directions to explore include the development of the GR to build the best paths on the basis of mobility, scheduling, and real-time requirements, simulation experiments using other IWSN standards, and the evaluation of several state-of-the-art graph routing algorithms in real IWSN deployments.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}