
Indirect Monitoring of Frequencies of a Multiple Span Bridge Using Data Collected from an Instrumented Train: A Field Case Study

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Theoretical Background
2.1. Ensemble Empirical Mode Decomposition (EEMD) Method
2.2. Hilbert Huang Transformation (HHT)
2.3. EEMD Based HHT for Multiple Span Bridge Frequency
3. Field Measurements
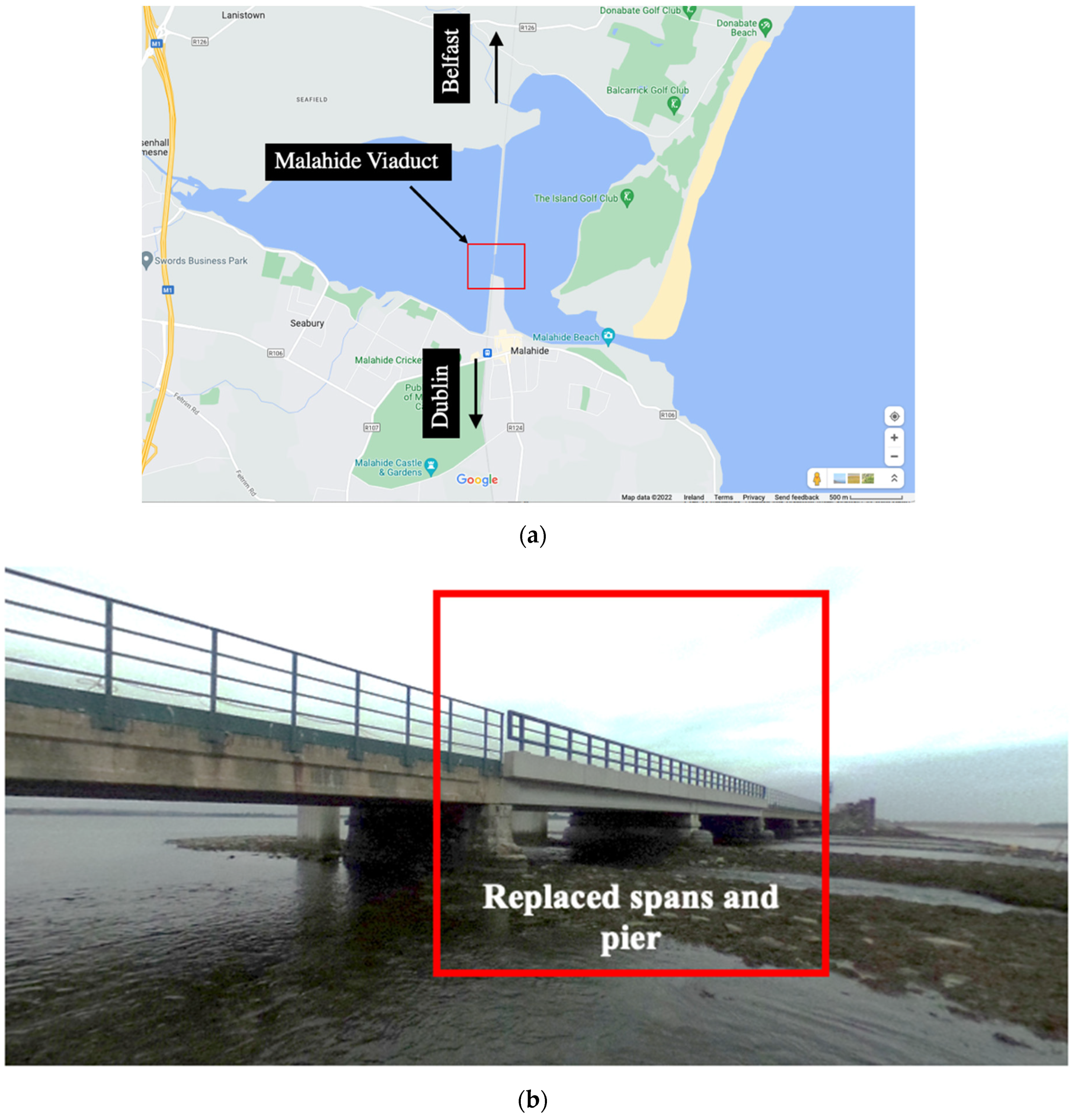
3.1. Malahide Viaduct UBB30 Ireland
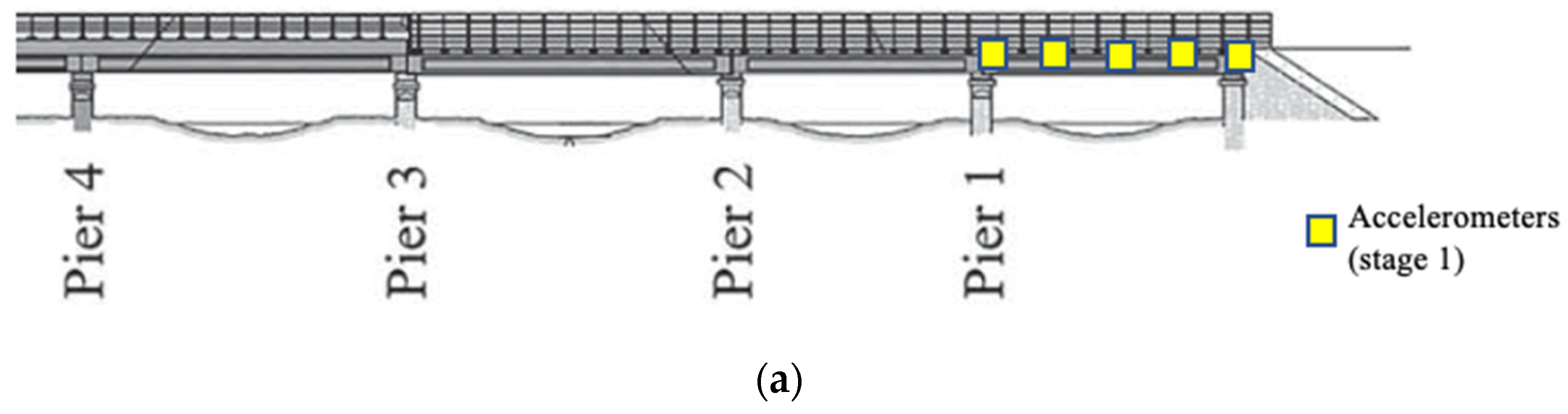
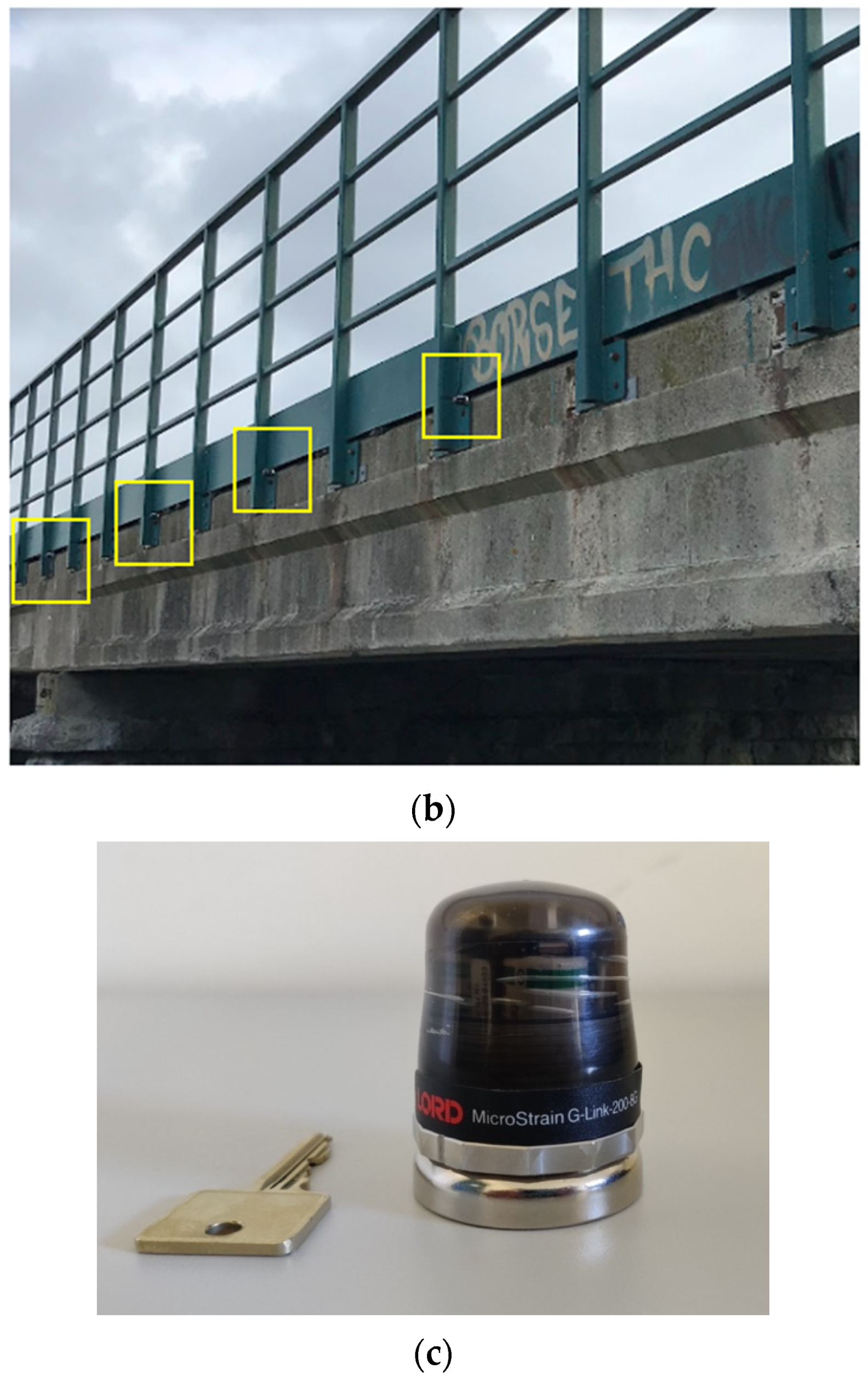
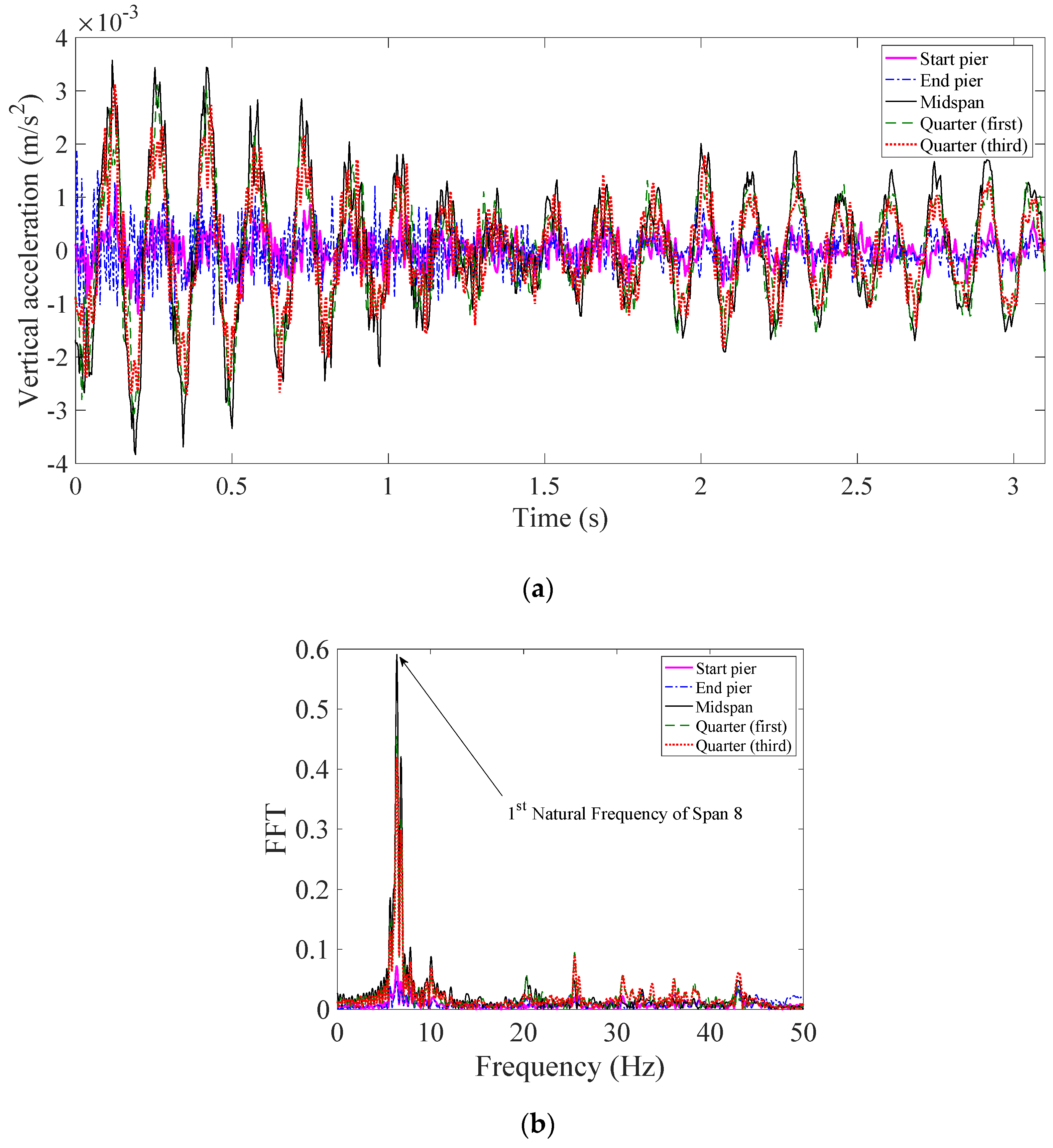
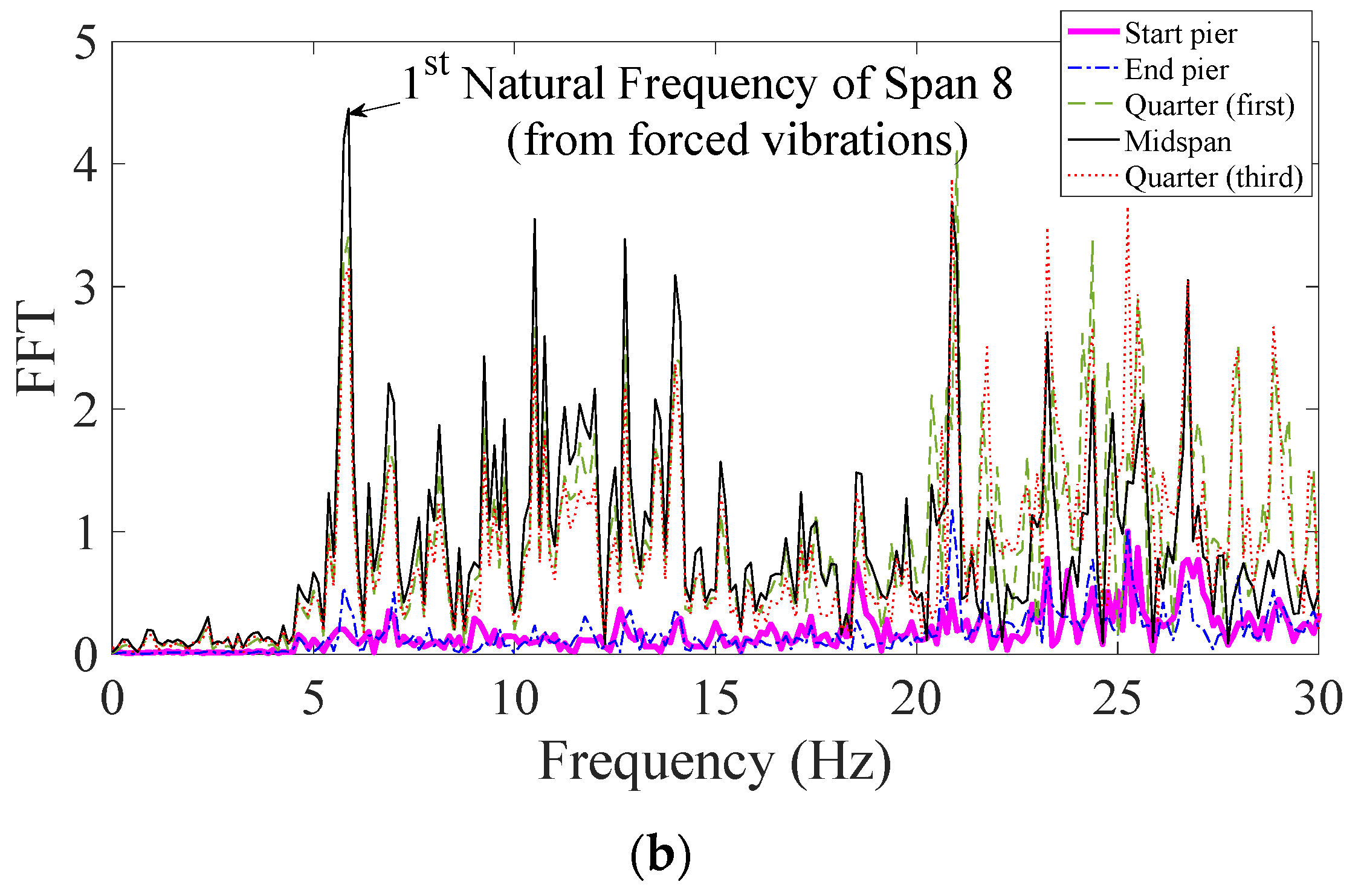
3.2. Direct Measurements
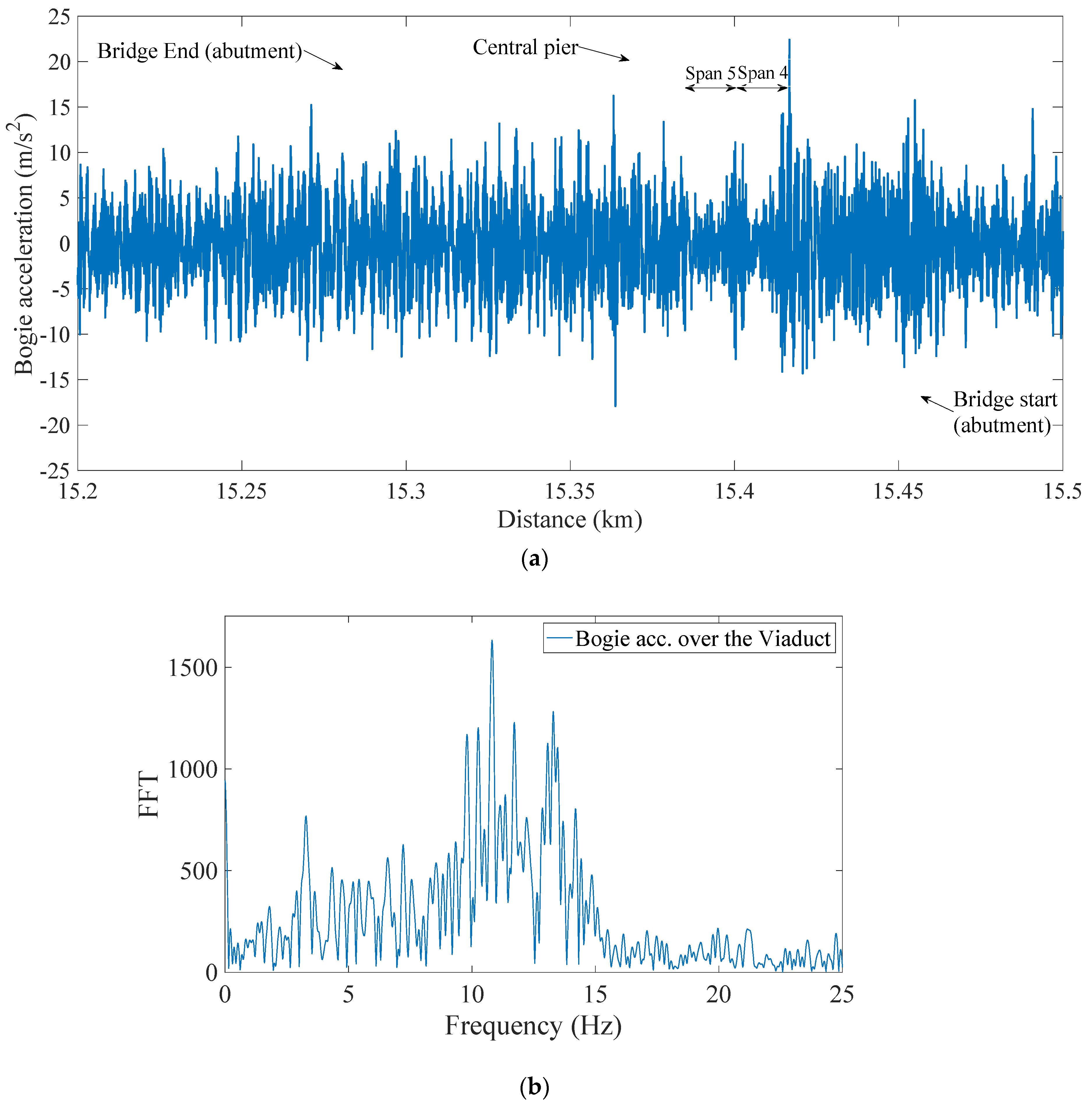
3.3. Instrumented Train and Its Properties
4. Analysis of Indirect Measurements
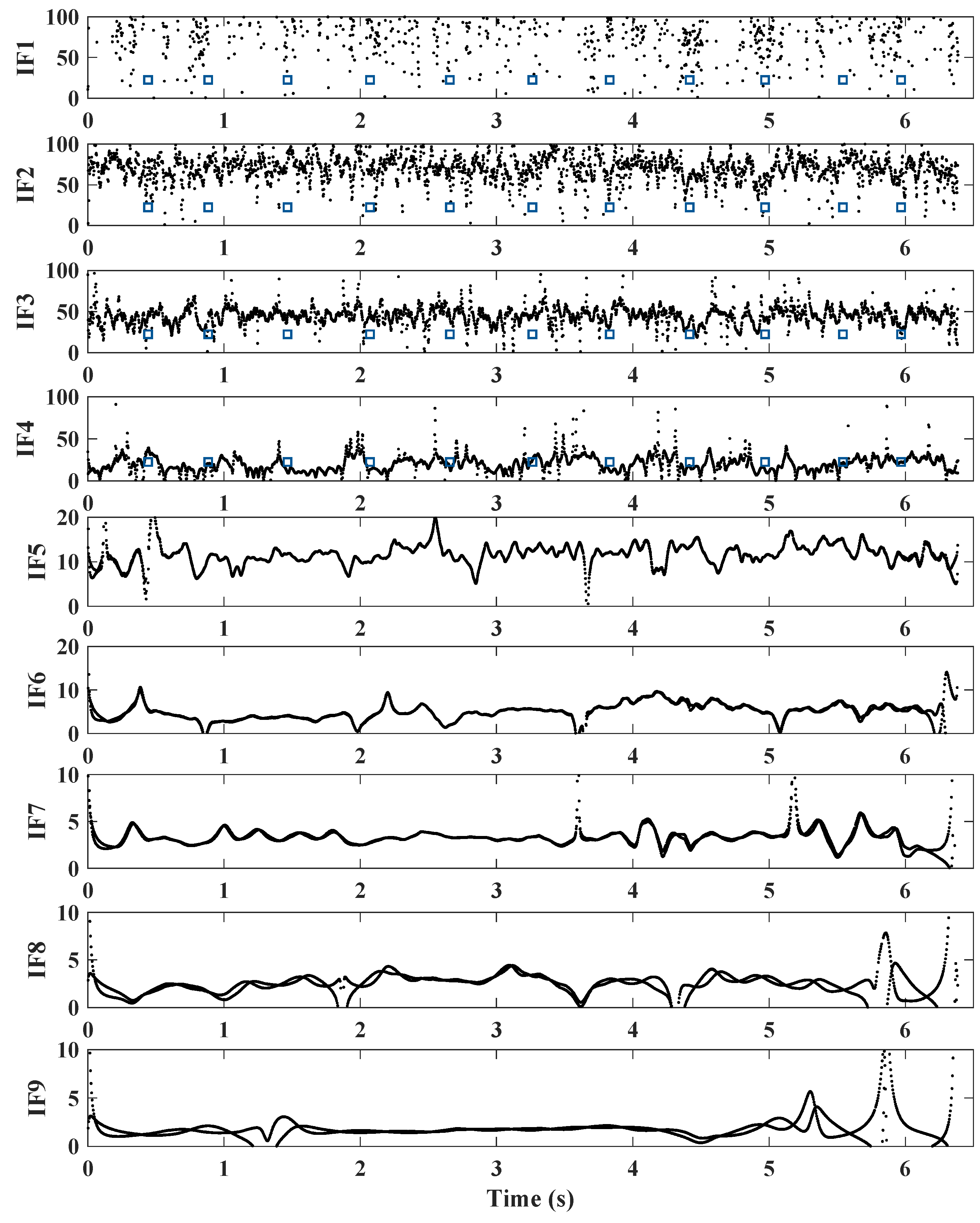
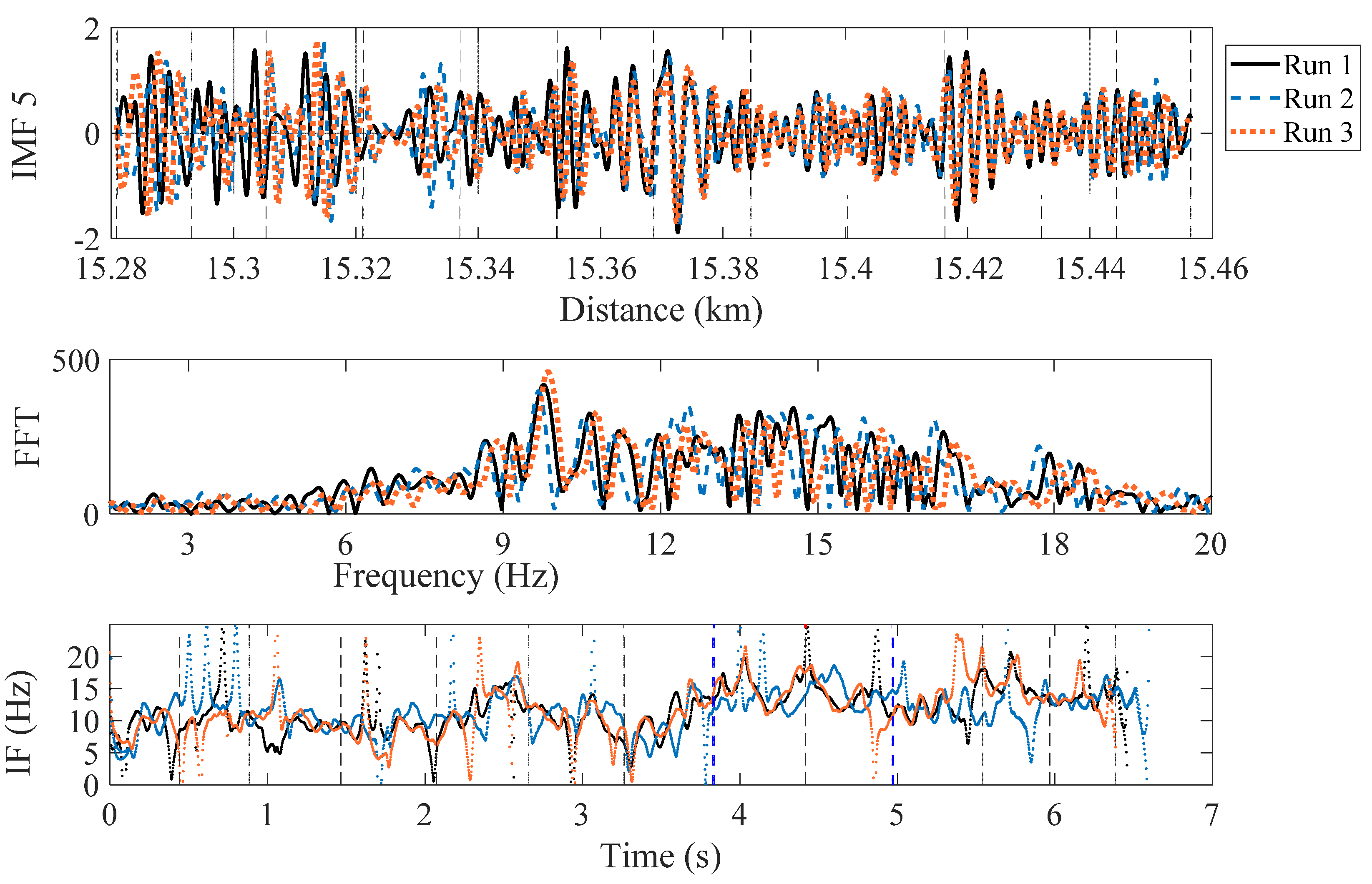
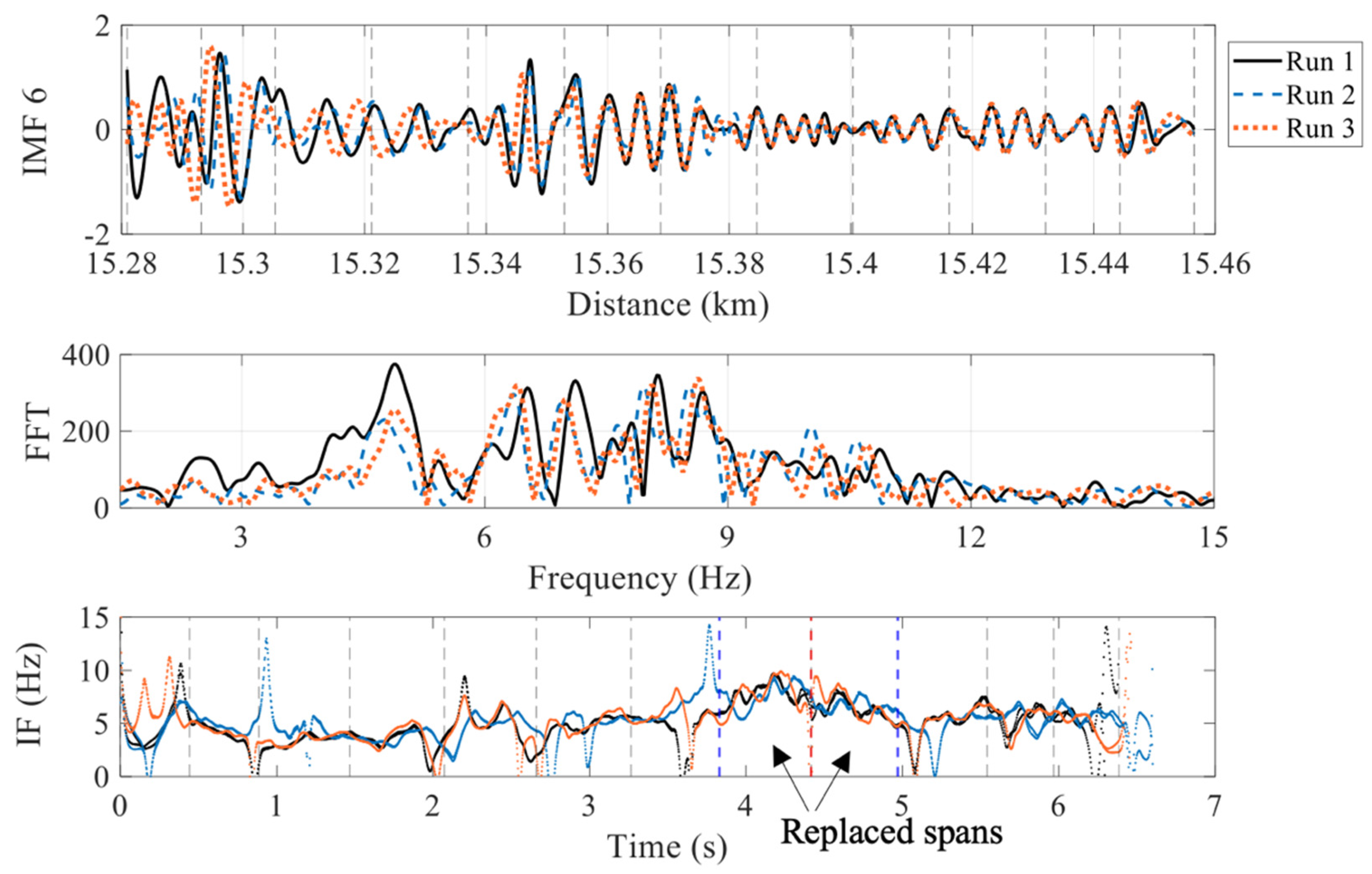
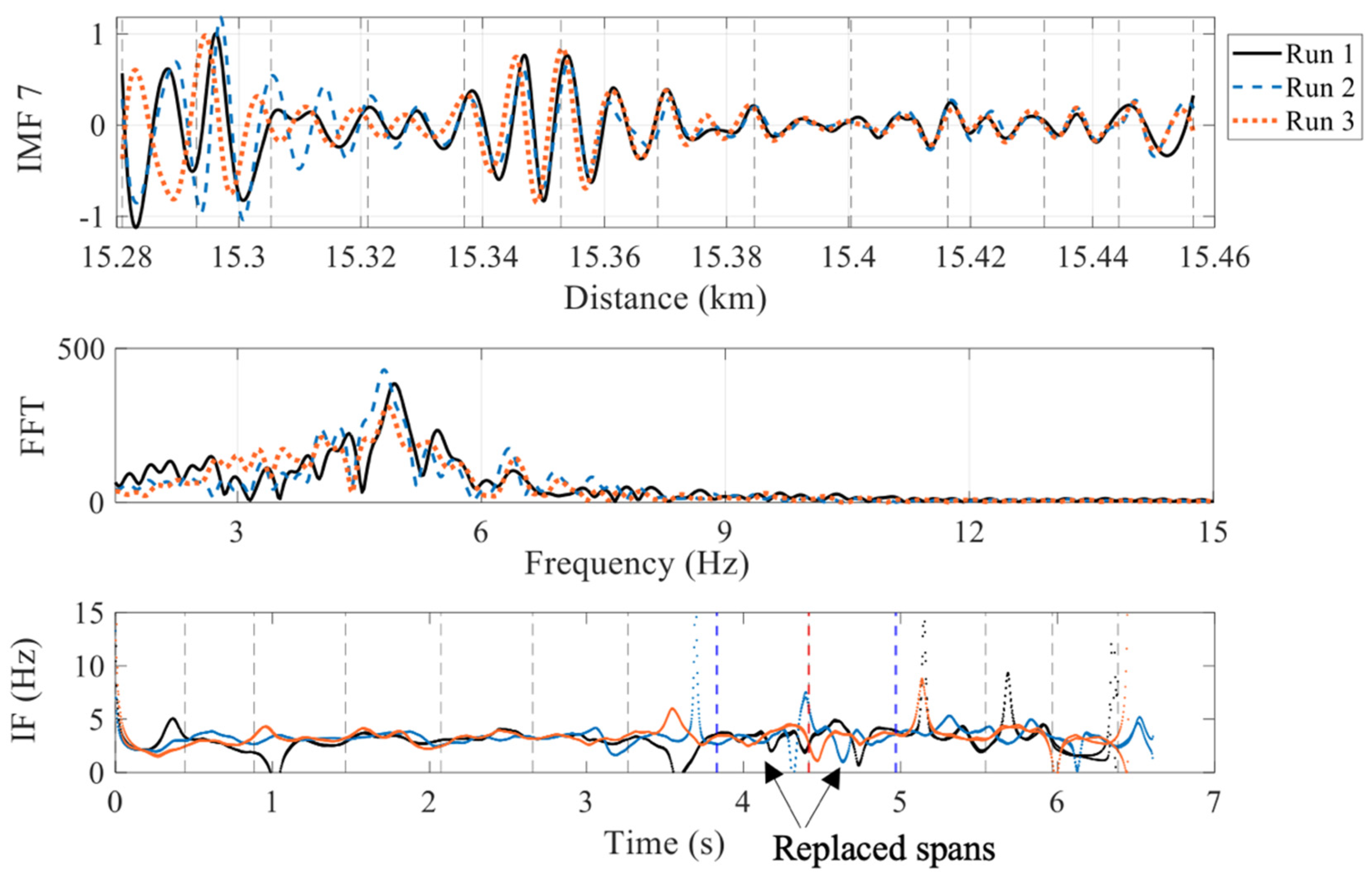
4.1. EEMD-Based HHT Analysis
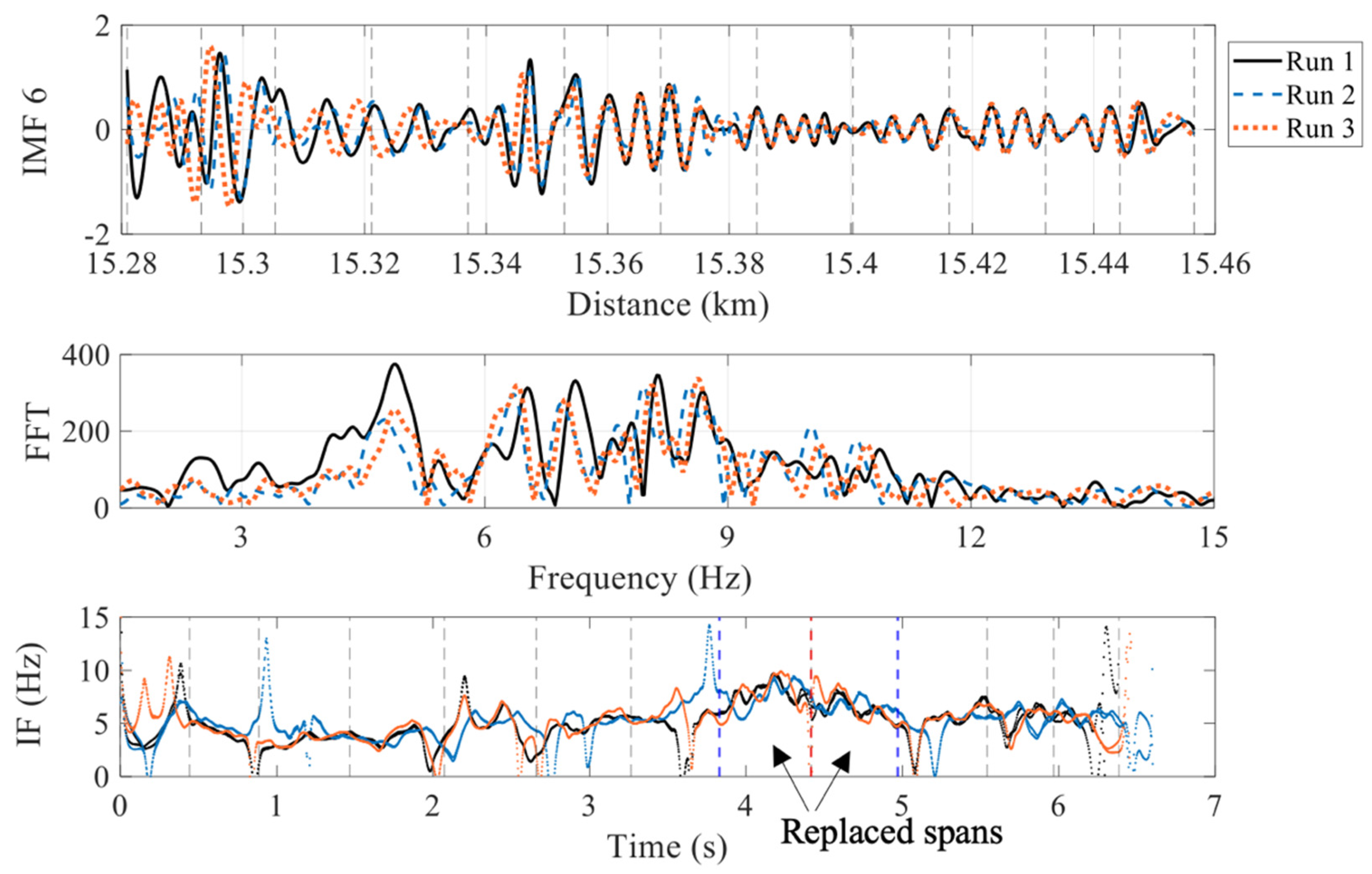
4.2. Results and Discussion
4.3. Energy Amplitude of the Signal
5. Conclusions
- The EEMD approach can be employed with drive-by measurements to detect the fundamental frequency of each span of a multiple span bridge. However, some preliminary information about the bridge frequencies or their ranges is required for effective application of the proposed approach.
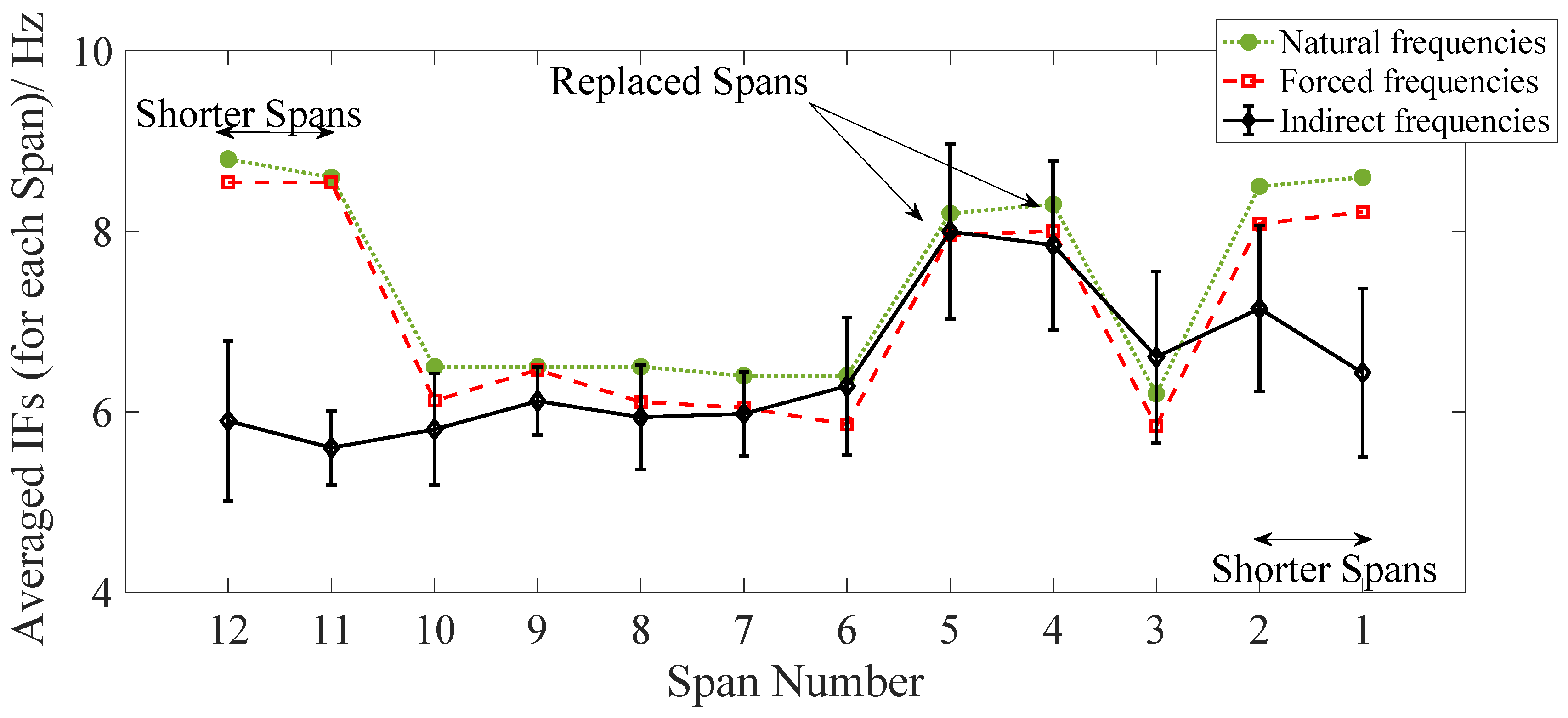
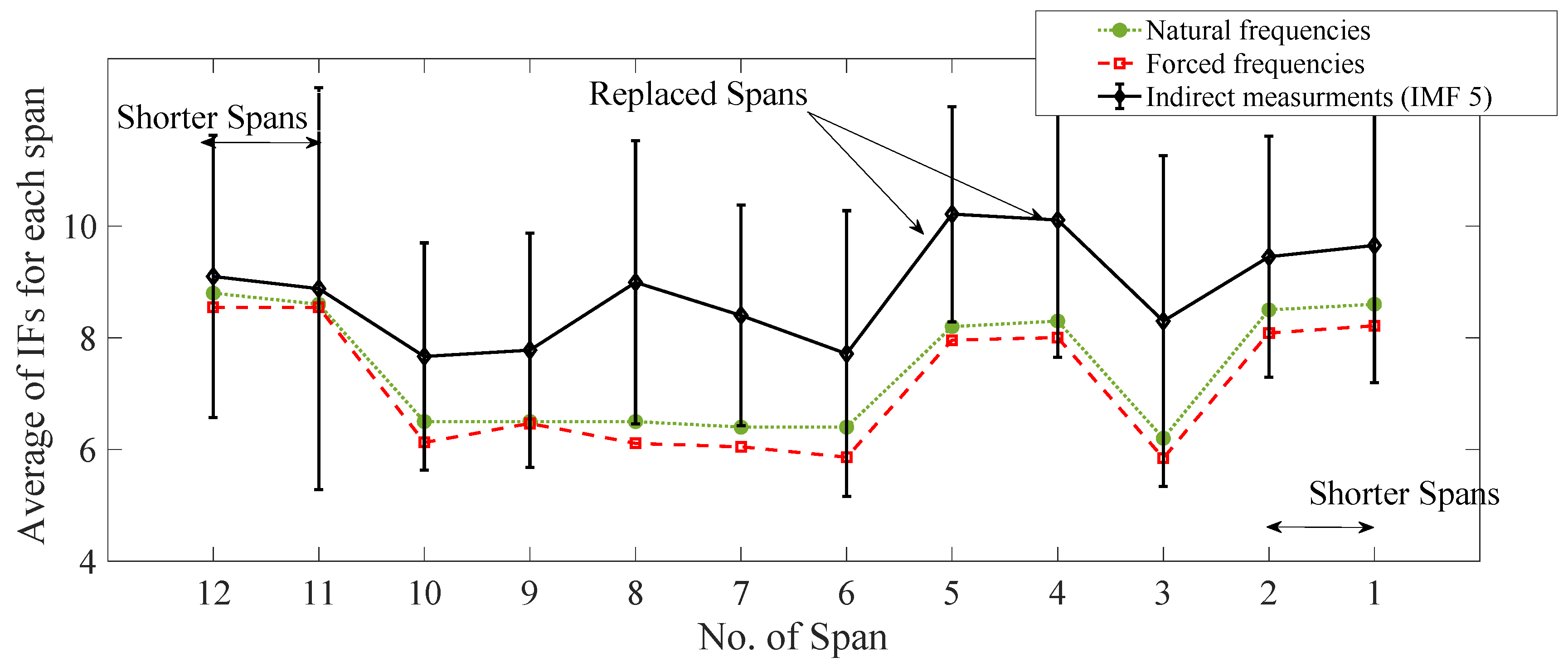
- The natural frequencies estimated from indirect measurements are reasonably close to the direct measurements and both measurements follow the same pattern of frequency changes in the internal spans of equal length.
- The results from forced vibrations (compared to free vibrations) are closer to the ones obtained from drive-by approach which is due to the added-mass effect of the crossing train.
- The proposed approach shows reasonable results when is used for comparing the frequencies of the spans with same length, while it becomes more challenging for shorter spans.
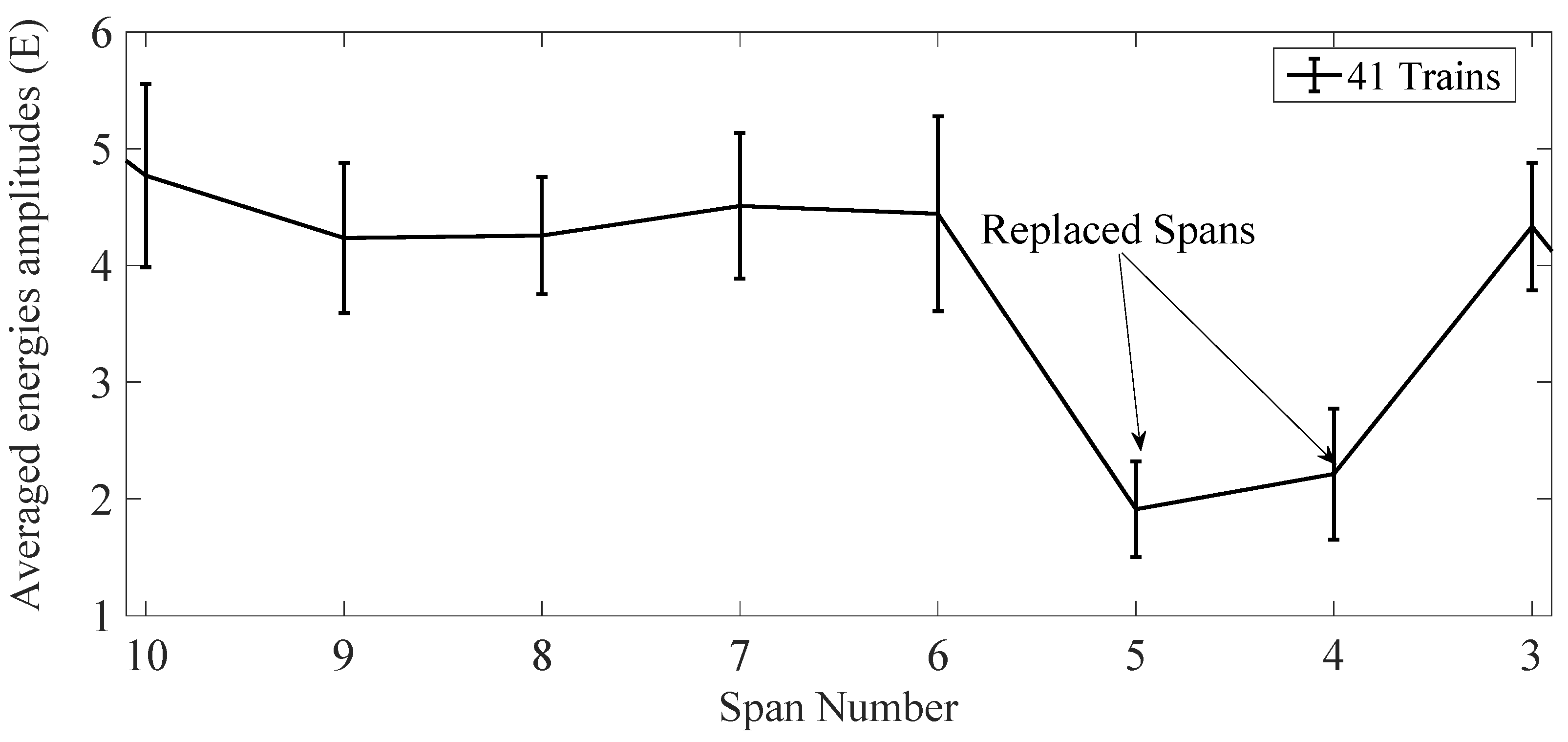
- The energy of the frequencies are seen to decrease in the two replaced spans. Therefore, it can be used as a damage indicator for loss of global stiffness in future studies.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bao, T.; Liu, Z. Vibration-based bridge scour detection: A review. Struct. Control Health Monit. 2017, 24, e1937. [Google Scholar] [CrossRef]
- Malekjafarian, A.; McGetrick, P.J.; OBrien, E.J. A Review of Indirect Bridge Monitoring Using Passing Vehicles. Shock Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef] [Green Version]
- OBrien, E.; Khan, M.A.; McCrum, D.; Žnidarič, A. Using Statistical Analysis of an Acceleration-Based Bridge Weigh-In-Motion System for Damage Detection. Appl. Sci. 2020, 10, 663. [Google Scholar] [CrossRef] [Green Version]
- Malekjafarian, A.; Kim, C.-W.; O’Brien, E.; Prendergast, L.; Fitzgerald, P.; Nakajima, S. Experimental demonstration of a mode shape-based scour monitoring method for multi-span bridges with shallow foundations. J. Bridge Eng. 2020, 25, 04020050. [Google Scholar] [CrossRef]
- Khan, M.A.; McCrum, D.P.; Prendergast, L.J.; OBrien, E.J.; Fitzgerald, P.C.; Kim, C.-W. Laboratory investigation of a bridge scour monitoring method using decentralized modal analysis. Struct. Health Monit. 2021, 20, 3327–3341. [Google Scholar] [CrossRef]
- Scattarreggia, N.; Salomone, R.; Moratti, M.; Malomo, D.; Pinho, R.; Calvi, G.M. Collapse analysis of the multi-span reinforced concrete arch bridge of Caprigliola, Italy. Eng. Struct. 2022, 251, 113375. [Google Scholar] [CrossRef]
- Micu, E.A.; OBrien, E.J.; Bowe, C.; Fitzgerald, P.; Pakrashi, V. Bridge damage and repair detection using an instrumented train. J. Bridge Eng. 2022, 27, 05021018. [Google Scholar] [CrossRef]
- Barke, D.; Chiu, W.K. Structural health monitoring in the railway industry: A review. Struct. Health Monit. 2005, 4, 81–93. [Google Scholar] [CrossRef]
- Shi, Z.; Law, S.; Zhang, L. Damage localization by directly using incomplete mode shapes. J. Eng. Mech. 2000, 126, 656–660. [Google Scholar] [CrossRef]
- OBrien, E.J.; Quilligan, M.; Karoumi, R. Calculating an influence line from direct measurements. Bridge Eng. Proc. Inst. Civ. Eng. 2006, 159 (BEI), 31–34. [Google Scholar] [CrossRef]
- OBrien, E.J.; McCrum, D.P.; Khan, M.A.; Prendergast, L.J. Wavelet-based operating deflection shapes for locating scour-related stiffness losses in multi-span bridges. Struct. Infrastruct. Eng. 2021, 1–16. [Google Scholar] [CrossRef]
- Oskoui, E.A.; Taylor, T.; Ansari, F. Method and monitoring approach for distributed detection of damage in multi-span continuous bridges. Eng. Struct. 2019, 189, 385–395. [Google Scholar] [CrossRef]
- Khodabandehlou, H.; Pekcan, G.; Fadali, M.S. Vibration-based structural condition assessment using convolution neural networks. Struct. Control Health Monit. 2019, 26, e2308. [Google Scholar] [CrossRef]
- Khan, M.A.; McCrum, D.P.; OBrien, E.J.; Bowe, C.; Hester, D.; McGetrick, P.J.; O’Higgins, C.; Casero, M.; Pakrashi, V. Re-deployable sensors for modal estimates of bridges and detection of damage-induced changes in boundary conditions. Struct. Infrastruct. Eng. 2021, 18, 1177–1191. [Google Scholar] [CrossRef]
- Rageh, A.; Azam, S.E.; Linzell, D.G. Steel railway bridge fatigue damage detection using numerical models and machine learning: Mitigating influence of modeling uncertainty. Int. J. Fatigue 2020, 134, 105458. [Google Scholar] [CrossRef]
- Cantero, D.; McGetrick, P.; Kim, C.-W.; OBrien, E. Experimental monitoring of bridge frequency evolution during the passage of vehicles with different suspension properties. Eng. Struct. 2019, 187, 209–219. [Google Scholar] [CrossRef]
- Cahill, P.; Hazra, B.; Karoumi, R.; Mathewson, A.; Pakrashi, V. Vibration energy harvesting based monitoring of an operational bridge undergoing forced vibration and train passage. Mech. Syst. Signal Process. 2018, 106, 265–283. [Google Scholar] [CrossRef] [Green Version]
- Lorenzoni, F.; De Conto, N.; da Porto, F.; Modena, C. Ambient and free-vibration tests to improve the quantification and estimation of modal parameters in existing bridges. J. Civ. Struct. Health Monit. 2019, 9, 617–637. [Google Scholar] [CrossRef]
- Cantero, D.; Karoumi, R.; González, A. The Virtual Axle concept for detection of localised damage using Bridge Weigh-in-Motion data. Eng. Struct. 2015, 89, 26–36. [Google Scholar] [CrossRef]
- Sha, G.; Radzieński, M.; Cao, M.; Ostachowicz, W. A novel method for single and multiple damage detection in beams using relative natural frequency changes. Mech. Syst. Signal Process. 2019, 132, 335–352. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Prendergast, L.; OBrien, E.J. Use of mode shape ratios for pier scour monitoring in two-span integral bridges under changing environmental conditions. Can. J. Civ. Eng. 2020, 47, 962–973. [Google Scholar] [CrossRef]
- OBrien, E.J.; Heitner, B.; AlešZnidaric, F.S.; Causse, G.; Yalamas, T. Validation of bridge health monitoring system using temperature as a proxy for damage. Struct. Control Health Monit. 2020, 27, e2588. [Google Scholar] [CrossRef]
- Corbally, R.; Malekjafarian, A. A data-driven approach for drive-by damage detection in bridges considering the influence of temperature change. Eng. Struct. 2022, 253, 113783. [Google Scholar] [CrossRef]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Gabbouj, M.; Inman, D.J. A review of vibration-based damage detection in civil structures: From traditional methods to Machine Learning and Deep Learning applications. Mech. Syst. Signal Process. 2021, 147, 107077. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Gavin, K.; Hester, D. Isolating the location of scour-induced stiffness loss in bridges using local modal behaviour. J. Civ. Struct. Health Monit. 2017, 7, 483–503. [Google Scholar] [CrossRef] [Green Version]
- Fitzgerald, P.C.; Malekjafarian, A.; Cantero, D.; OBrien, E.J.; Prendergast, L.J. Drive-by scour monitoring of railway bridges using a wavelet-based approach. Eng. Struct. 2019, 191, 1–11. [Google Scholar] [CrossRef]
- Liu, F.; Xu, Q.; Liu, Y. Condition diagnosis of long-span bridge pile foundations based on the spatial correlation of high-density strain measurement points. Sustainability 2021, 13, 12498. [Google Scholar] [CrossRef]
- Prendergast, L.J.; Hester, D.; Gavin, K.; O’sullivan, J. An investigation of the changes in the natural frequency of a pile affected by scour. J. Sound Vib. 2013, 332, 6685–6702. [Google Scholar] [CrossRef] [Green Version]
- Fitzgerald, P.C.; Malekjafarian, A.; Bhowmik, B.; Prendergast, L.J.; Cahill, P.; Kim, C.-W.; Hazra, B.; Pakrashi, V.; OBrien, E.J. Scour damage detection and structural health monitoring of a laboratory-scaled bridge using a vibration energy harvesting device. Sensors 2019, 19, 2572. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Yang, J.P. State-of-the-art review on modal identification and damage detection of bridges by moving test vehicles. Int. J. Struct. Stab. Dyn. 2018, 18, 1850025. [Google Scholar] [CrossRef]
- Shokravi, H.; Shokravi, H.; Bakhary, N.; Heidarrezaei, M.; Rahimian Koloor, S.S.; Petrů, M. Vehicle-assisted techniques for health monitoring of bridges. Sensors 2020, 20, 3460. [Google Scholar] [CrossRef] [PubMed]
- Malekjafarian, A.; Corbally, R.; Gong, W. A review of mobile sensing of bridges using moving vehicles: Progress to date, challenges and future trends. Structures 2022, 44, 1466–1489. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Martinez, D.; OBrien, E.J. The Feasibility of Using Laser Doppler Vibrometer Measurements from a Passing Vehicle for Bridge Damage Detection. Shock. Vib. 2018, 2018, 9385171. [Google Scholar] [CrossRef] [Green Version]
- Sitton, J.D.; Zeinali, Y.; Rajan, D.; Story, B.A. Frequency estimation on two-span continuous bridges using dynamic responses of passing vehicles. J. Eng. Mech. 2020, 146, 04019115. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E.; Chen, X. The multi-dimensional ensemble empirical mode decomposition method. Adv. Adapt. Data Anal. 2009, 1, 339–372. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; OBrien, E. Drive-by bridge frequency identification under operational roadway speeds employing frequency independent underdamped pinning stochastic resonance (fi-upsr). Sensors 2018, 18, 4207. [Google Scholar] [CrossRef] [Green Version]
- Shirzad-Ghaleroudkhani, N.; Gül, M. Inverse filtering for frequency identification of bridges using smartphones in passing vehicles: Fundamental developments and laboratory verifications. Sensors 2020, 20, 1190. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shirzad-Ghaleroudkhani, N.; Gül, M. An Enhanced Inverse Filtering Methodology for Drive-By Frequency Identification of Bridges Using Smartphones in Real-Life Conditions. Smart Cities 2021, 4, 26. [Google Scholar] [CrossRef]
- Dhakal, S.; Malla, R.B. Determination of Natural Frequencies of a Steel Railroad Bridge Using Onboard Sensors. In Earth and Space 2018: Engineering for Extreme Environments; American Society of Civil Engineers: Reston, VA, USA, 2018; pp. 1034–1046. [Google Scholar]
- Malekjafarian, A.; OBrien, E.J. On the use of a passing vehicle for the estimation of bridge mode shapes. J. Sound Vib. 2017, 397, 77–91. [Google Scholar] [CrossRef] [Green Version]
- Bagheri, A.; Ozbulut, O.E.; Harris, D.K. Structural system identification based on variational mode decomposition. J. Sound Vib. 2018, 417, 182–197. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.; Kong, B. Numerically extracting bridge modal properties from dynamic responses of moving vehicles. J. Eng. Mech. 2016, 142, 04016025. [Google Scholar] [CrossRef]
- Rahai, M.; Esfandiari, A.; Bakhshi, A. Detection of structural damages by model updating based on singular value decomposition of transfer function subsets. Struct. Control Health Monit. 2020, 27, e2622. [Google Scholar] [CrossRef]
- Zhang, X.; Li, W.; Zhu, Z.; Yang, S.; Jiang, F. Fault detection for the scraper chain based on vibration analysis using the adaptive optimal kernel time-frequency representation. Shock. Vib. 2019, 2019, 6986240. [Google Scholar] [CrossRef] [Green Version]
- Huang, N.E. Hilbert-Huang Transform and Its Applications; World Scientific: Singapore, 2014; Volume 16. [Google Scholar]
- Rilling, G.; Flandrin, P.; Goncalves, P. On empirical mode decomposition and its algorithms. Proceedings of IEEE-EURASIP Workshop on Nonlinear Signal and Image Processing, Grado, Italy, 8–11 June 2003; pp. 8–11. [Google Scholar]
- Attoh-Okine, N.; Barner, K.; Bentil, D.; Zhang, R. The empirical mode decomposition and the Hilbert-Huang transform. EURASIP J. Adv. Signal Process. 2008, 2008, 1–2. [Google Scholar] [CrossRef] [Green Version]
- OBrien, E.J.; Malekjafarian, A.; González, A. Application of empirical mode decomposition to drive-by bridge damage detection. Eur. J. Mech.-A/Solids 2017, 61, 151–163. [Google Scholar] [CrossRef] [Green Version]
- Aied, H.; González, A.; Cantero, D. Identification of sudden stiffness changes in the acceleration response of a bridge to moving loads using ensemble empirical mode decomposition. Mech. Syst. Signal Process. 2016, 66, 314–338. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Malekjafarian, A. On the use of ensemble empirical mode decomposition for the identification of bridge frequency from the responses measured in a passing vehicle. Infrastructures 2019, 4, 32. [Google Scholar] [CrossRef] [Green Version]
- Brady, S. Learning from failures-an overview. Eng. Aust. Gen. Ed. 2011, 83, 40–42. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Quirke, P.; Cantero, D.; OBrien, E.J.; Bowe, C. Drive-by detection of railway track stiffness variation using in-service vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2017, 231, 498–514. [Google Scholar] [CrossRef] [Green Version]
- Quirke, P. Drive-by Detection of Railway Track Longitudinal Profile, Stiffness and Bridge Damage; University College Dublin: Dublin, Ireland, 2017. [Google Scholar]
- Quirke, P.; OBrien, E.J.; Bowe, C.; Cantero, D.; Malekjafarian, A. The calibration challenge when inferring longitudinal track profile from the inertial response of an in-service train. Can. J. Civ. Eng. 2022, 49, 274–288. [Google Scholar] [CrossRef]
- Malekjafarian, A.; OBrien, E.J.; Golpayegani, F. Indirect monitoring of critical transport infrastructure: Data analytics and signal processing. In Data Analytics for Smart Cities; Auerbach Publications: Boca Raton, FL, USA, 2018; pp. 157–176. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Fundamental Frequency (Hz) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Span No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| Span length (m) | 12.2 | 12.2 | 15.85 | 15.85 | 15.85 | 15.85 | 15.85 | 15.85 | 15.85 | 15.85 | 12.2 | 12.2 |
| Free vibration | 8.6 | 8.5 | 6.2 | 8.3 | 8.2 | 6.4 | 6.4 | 6.5 | 6.5 | 6.5 | 8.6 | 8.8 |
| Forced vibration | 8.2 | 8.1 | 5.8 | 8.0 | 8.0 | 5.9 | 6.0 | 6.1 | 6.5 | 6.1 | 8.5 | 8.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malekjafarian, A.; Khan, M.A.; OBrien, E.J.; Micu, E.A.; Bowe, C.; Ghiasi, R. Indirect Monitoring of Frequencies of a Multiple Span Bridge Using Data Collected from an Instrumented Train: A Field Case Study. Sensors 2022, 22, 7468. https://doi.org/10.3390/s22197468
Malekjafarian A, Khan MA, OBrien EJ, Micu EA, Bowe C, Ghiasi R. Indirect Monitoring of Frequencies of a Multiple Span Bridge Using Data Collected from an Instrumented Train: A Field Case Study. Sensors. 2022; 22(19):7468. https://doi.org/10.3390/s22197468
Chicago/Turabian StyleMalekjafarian, Abdollah, Muhammad Arslan Khan, Eugene J. OBrien, E. Alexandra Micu, Cathal Bowe, and Ramin Ghiasi. 2022. "Indirect Monitoring of Frequencies of a Multiple Span Bridge Using Data Collected from an Instrumented Train: A Field Case Study" Sensors 22, no. 19: 7468. https://doi.org/10.3390/s22197468
APA StyleMalekjafarian, A., Khan, M. A., OBrien, E. J., Micu, E. A., Bowe, C., & Ghiasi, R. (2022). Indirect Monitoring of Frequencies of a Multiple Span Bridge Using Data Collected from an Instrumented Train: A Field Case Study. Sensors, 22(19), 7468. https://doi.org/10.3390/s22197468