
Study on Doppler Spectra of Electromagnetic Scattering of Time-Varying Kelvin Wake on Sea Surface

Abstract
:1. Introduction
2. Time-Varying Linear Superposition Model of Sea Surface and Kelvin Wake
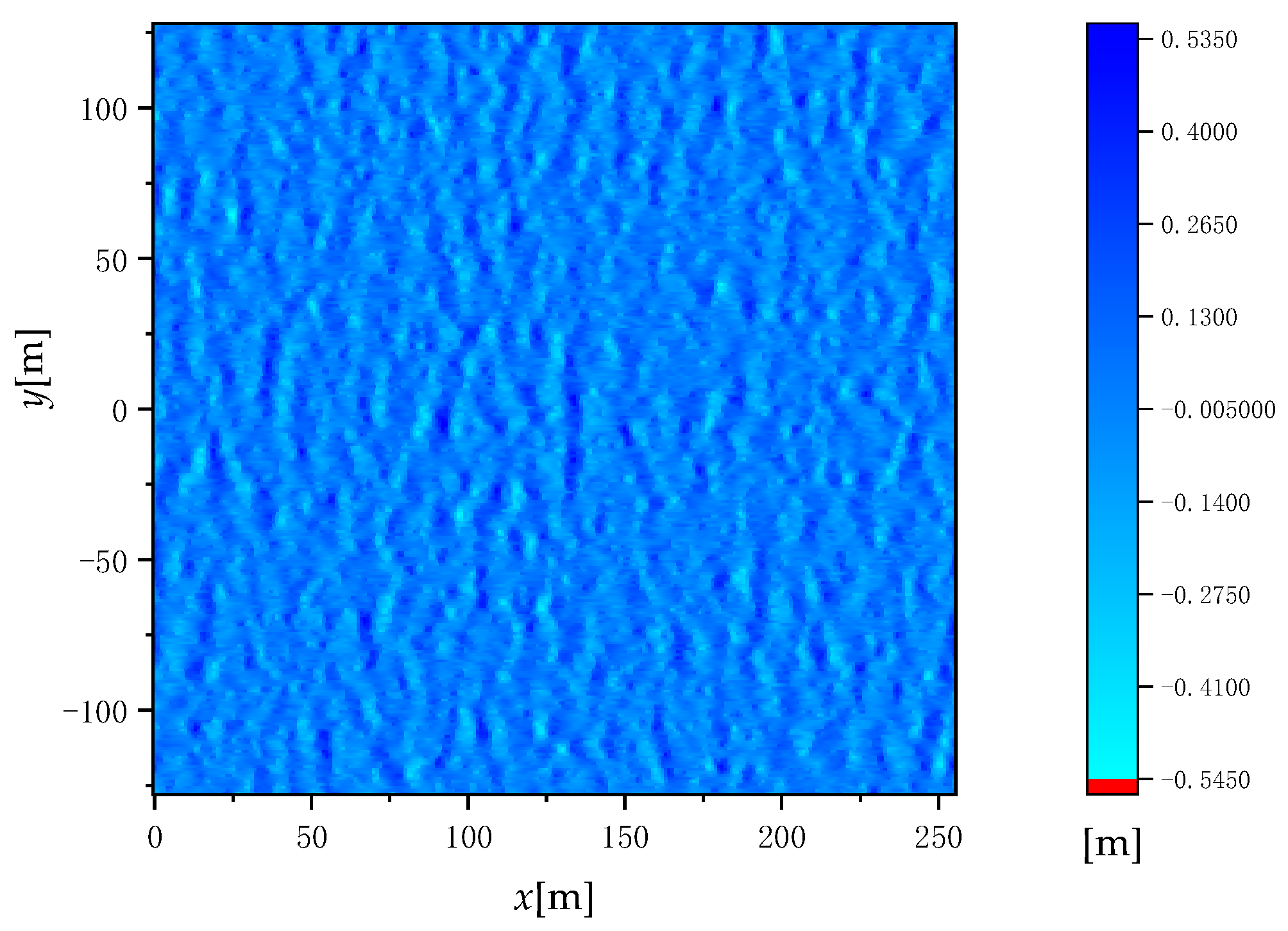
2.1. Time-Varying Sea Surface Model
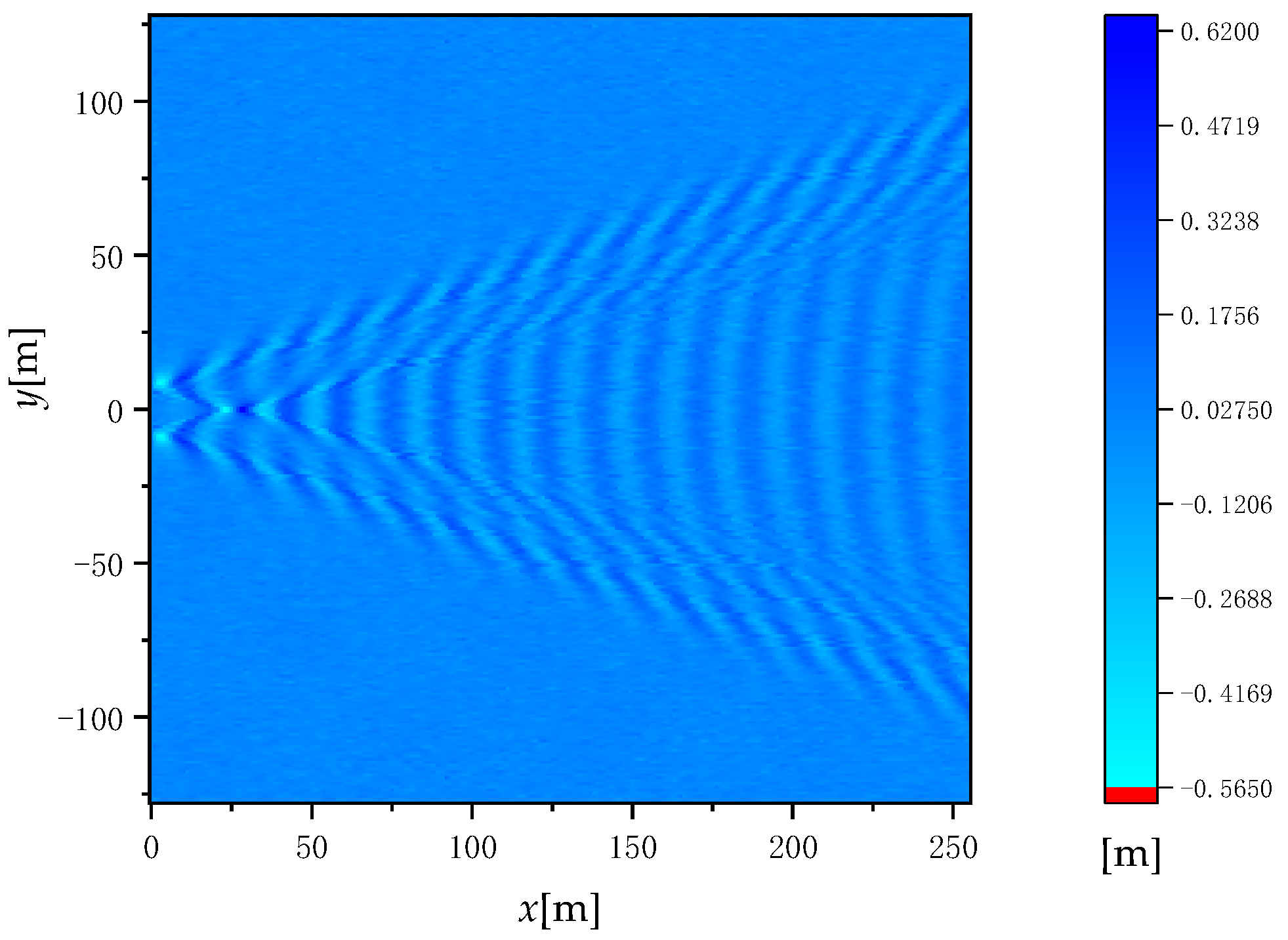
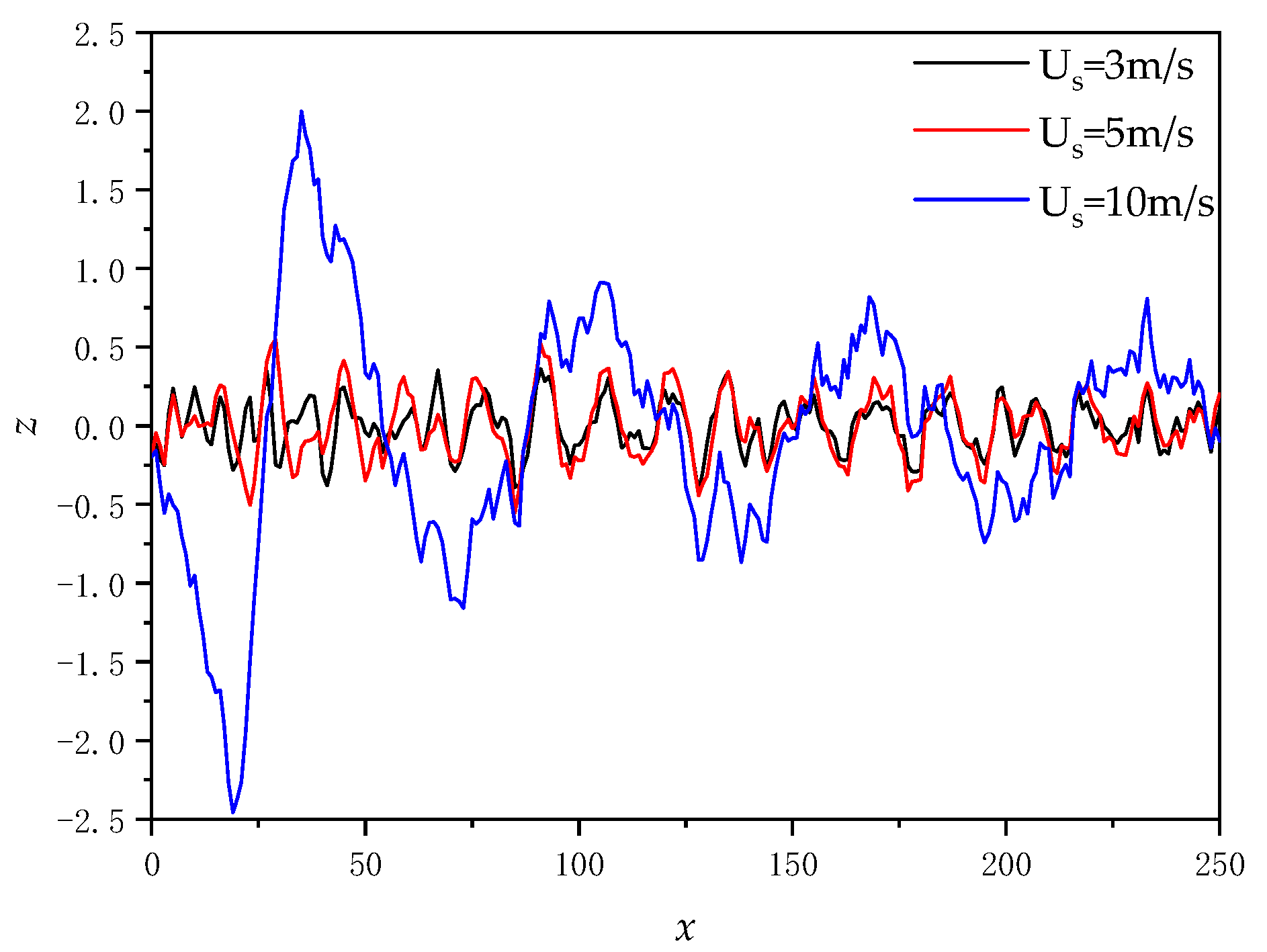
2.2. Time-Varying Kelvin Wake Model
2.3. Linear Superposition of Kelvin Wake and Sea Surface
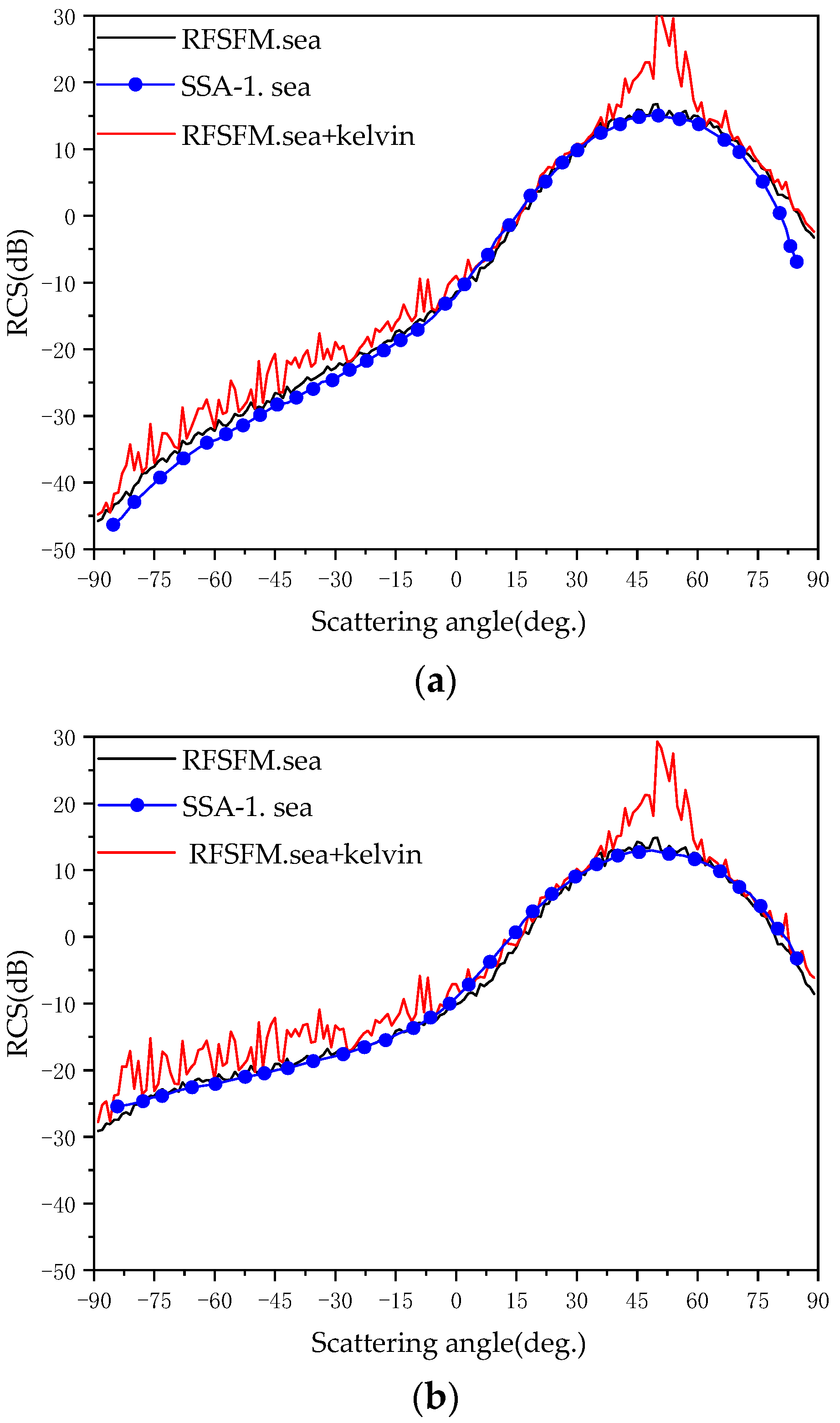
3. Facet Scattering Field Model of Sea Surface
- The discrete intervals ∆x and ∆y of the sea surface were set to simulate the generation of Nt samples of the sea surface after the superposition of the ship wake and the sea surface with the time interval τ. If τ is small enough, the sample can be considered stationary at that time interval.
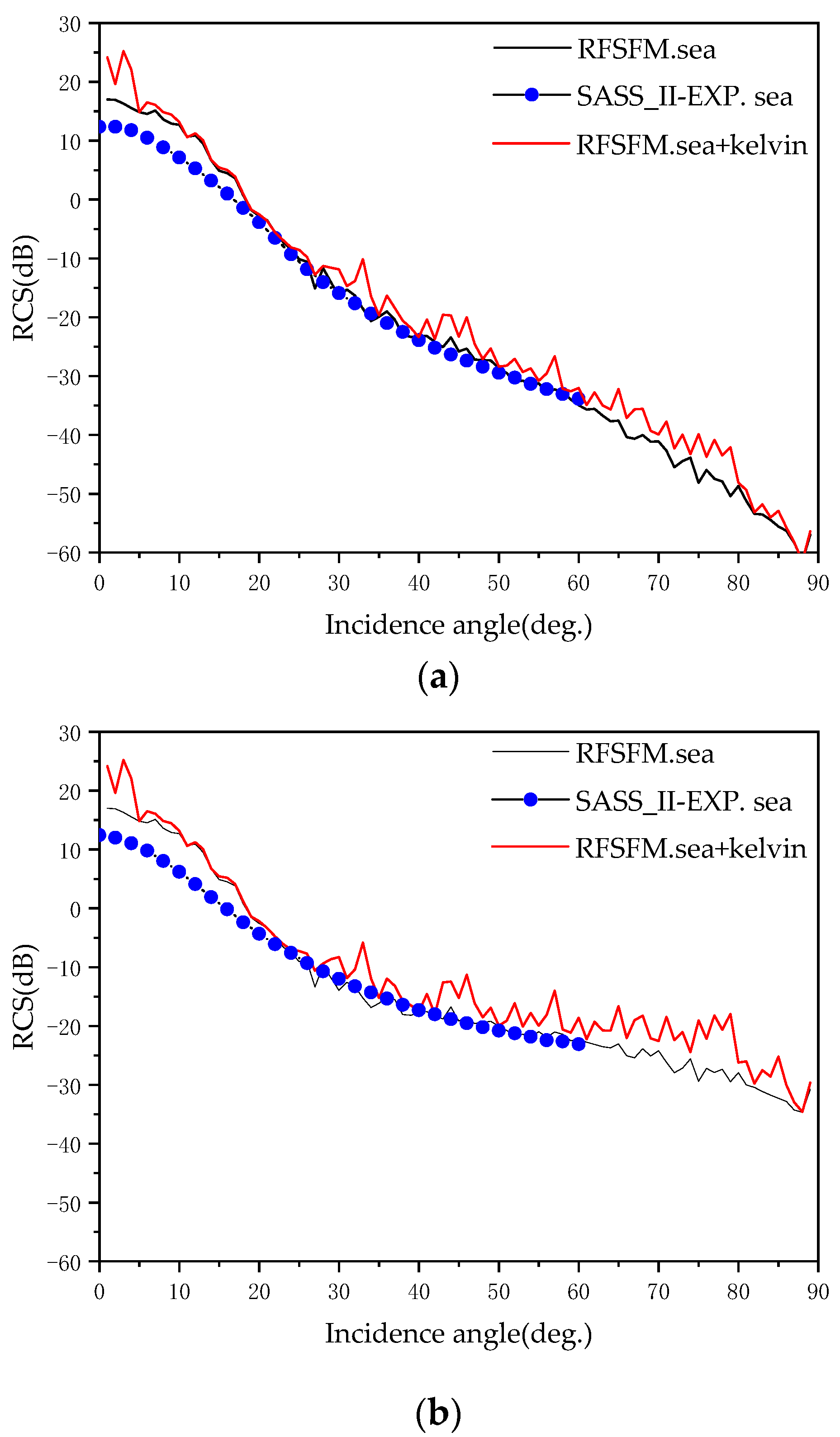
- RFSFM is used to calculate the scattering field of sea surface samples superimposed by ship wake and sea surface at different time points, to obtain a set of scattering field time series.
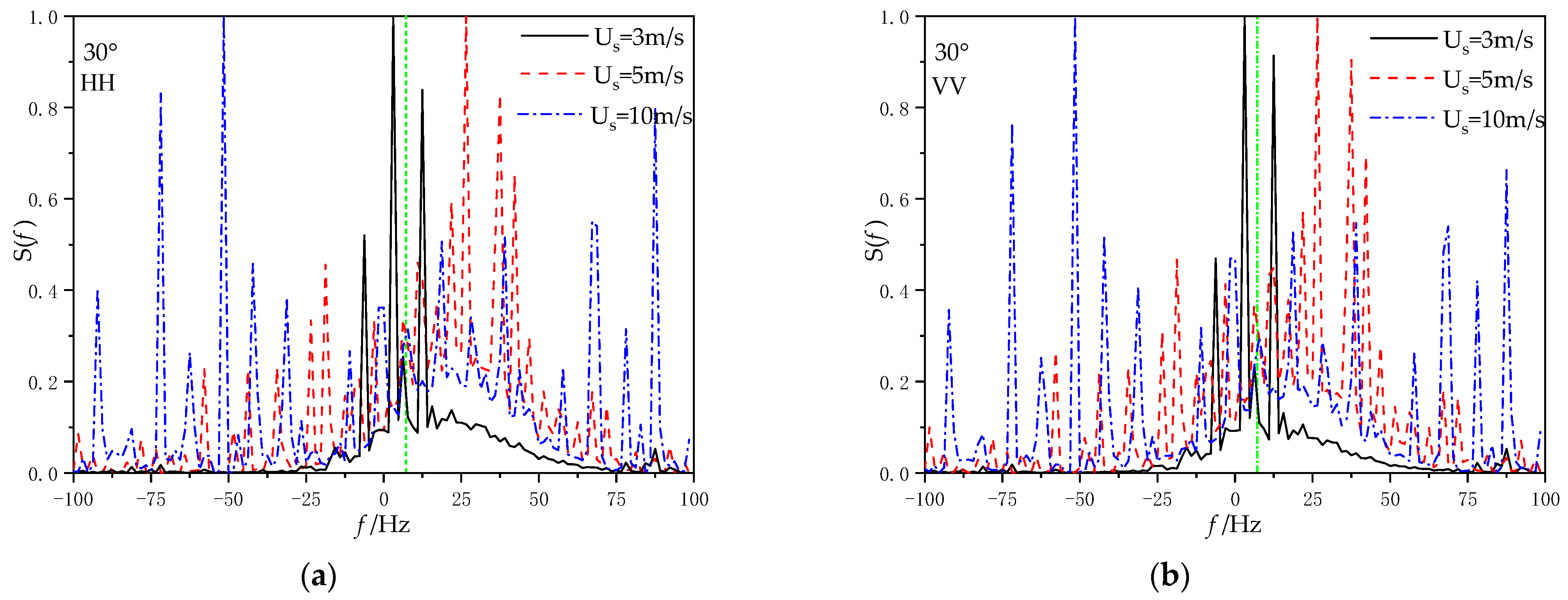
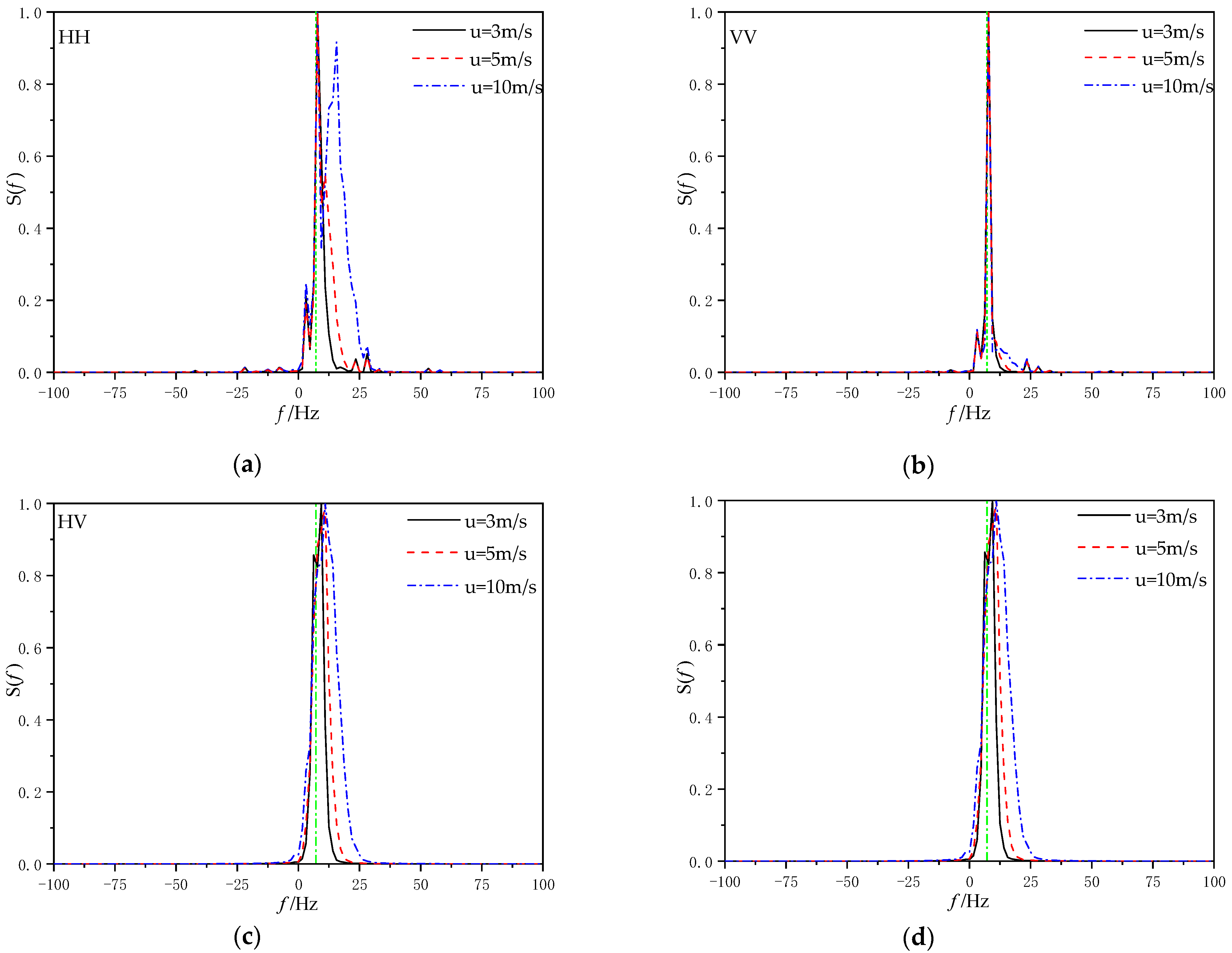
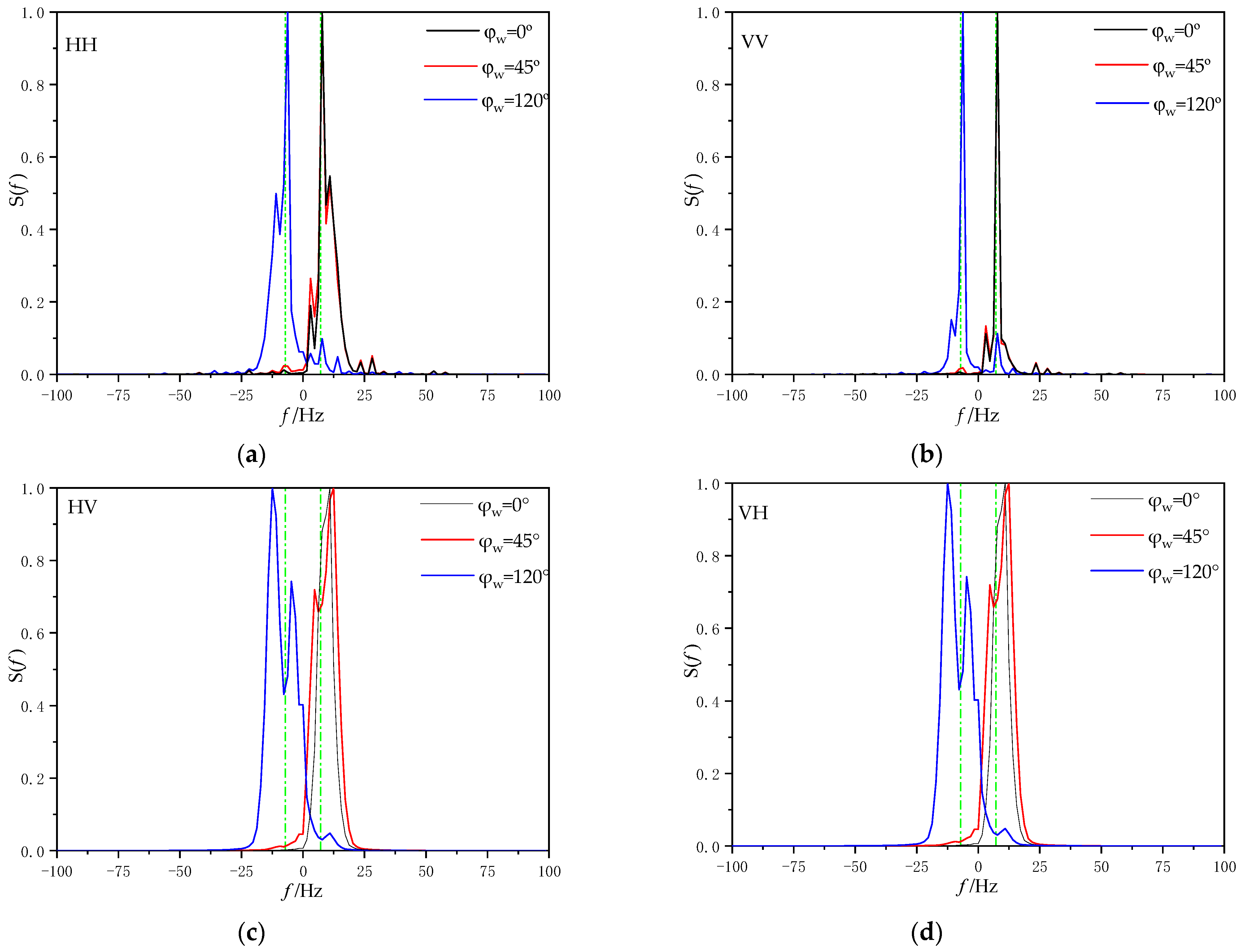
- The Doppler spectra of the obtained scattering field time series are calculated according to the standard spectrum estimation method expressed in Equation (18).
- Repeat the previous three steps to obtain the calculated results of multiple sets of Doppler spectra and find the average.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lei, N.; Tao, W.; Xi, C. Detection of the ship wakes from SAR image based on localized Radon Transform. In Proceedings of the 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar, Xi’an, China, 26–30 October 2009; pp. 763–766. [Google Scholar]
- Zhang, S.; Yang, Z.; Yang, L. Multi-directional Infrared Imaging Characterization of Ship Kelvin Wake. In Proceedings of the 2012 International Conference on Industrial Control and Electronics Engineering, Xi’an, China, 23–25 August 2012; pp. 144–146. [Google Scholar]
- Zhu, X.J.; Du, C.P.; Xia, M.Y. Modeling of magnetic field induced by ship wake. In Proceedings of the 2015 IEEE International Conference on Computational Electromagnetics, Hong Kong, China, 2–5 February 2015; pp. 374–376. [Google Scholar]
- Fujimura, A.; Soloviev, A.; Rhee, S.H.; Romeiser, R. Coupled Model Simulation of Wind Stress Effect on Far Wakes of Ships in SAR Images. IEEE Trans. Geosci. Electron. 2016, 54, 2543–2551. [Google Scholar] [CrossRef]
- Xiao, M.; Lixin, G.; Lu, W.; Juan, L. Analysis of the electromagnetic scattering characteristics from the ship-induced Kelvin wake on the rough sea surface. In Proceedings of the 2017 International Conference on Electromagnetics in Advanced Applications (ICEAA), Verona, Italy, 11–15 September 2017; pp. 1665–1668. [Google Scholar]
- Wu, R.; Yang, P.J.; Ren, X.C.; Wang, Y.Q. Investigation on EM Scattering from Sea Surfaces with Ship-Induced Kelvin Wake by Second-Order Small-Slope Approximation. In Proceedings of the 2018 IEEE International Conference on Computational Electromagnetics (ICCEM 2018), Chengdu, China, 26–28 March 2018; pp. 1–3. [Google Scholar]
- Wang, L.; Guo, L.; Meng, X. Research on Electromagnetic Scattering Characteristics of Kelvin Wake of Ship Based on MPI. In Proceedings of the 2018 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 3–6 December 2018; pp. 1–4. [Google Scholar]
- Graziano, M.D.; Sabella, M. Wake detection performance analysis in X- and C-band SAR images. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Wake Component Detection in X-Band SAR Images for Ship Heading and Velocity Estimation. Remote Sens. 2016, 8, 498. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Du, C.; Xia, M. Evaluation of Electromagnetic Fields Induced by Wake of an Undersea-Moving Slender Body. IEEE Access 2018, 6, 2943–2951. [Google Scholar] [CrossRef]
- Sun, Y.-X.; Liu, P.; Jin, Y.-Q. Ship Wake Components: Isolation, Reconstruction, and Characteristics Analysis in Spectral, Spatial, and TerraSAR-X Image Domains. IEEE Trans. Geosci. Electron. 2018, 56, 4209–4224. [Google Scholar] [CrossRef]
- Zhao, Y.-H.; Han, X.; Liu, P. A RPCA and RANSAC Based Algorithm for Ship Wake Detection in SAR Images. In Proceedings of the 2018 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 3–6 December 2018; pp. 1–4. [Google Scholar]
- Bi, N.; Qin, J.; Jiang, T. Partition Detection and Location of a Kelvin Wake on a 2-D Rough Sea Surface by Feature Selective Validation. IEEE Access 2018, 6, 16345–16352. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, M.; Wang, L. SAR image simulation analysis of sea surface containing underwater object wake. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019; pp. 1–4. [Google Scholar]
- Wei, Y.; Wu, Z.; Li, H.; Wu, J.; Qu, T. Application of Periodic Structure Scattering in Kelvin Ship Wakes Detection. Sustain. Cities Soc. 2019, 47, 101463. [Google Scholar] [CrossRef]
- Xue, F.; Jin, W.; Qiu, S.; Yang, J. Wake Features of Moving Submerged Bodies and Motion State Inversion of Submarines. IEEE Access 2020, 8, 12713–12724. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, L. A Novel Data-Driven Scheme for the Ship Wake Identification on the 2-D Dynamic Sea Surface. IEEE Access 2020, 8, 69593–69600. [Google Scholar] [CrossRef]
- Niu, J.; Liang, X.; Zhang, X. Time-Varying Kelvin Wake Model and Microwave Velocity Observation. Sensors 2020, 20, 1575. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elfouhaily, T.; Chapron, B.; Katsaros, K.; Vandemark, D. A unified directional spectrum for long and short wind-driven waves. J. Geophys. Res. 1997, 102, 15781–15796. [Google Scholar] [CrossRef] [Green Version]
- Creamer, D.; Henyey, F.; Schult, R.; Wright, J. Improved linear representation of ocean surface waves. J. Fluid Mech. 1989, 205, 135–161. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, H.; Yin, H. Facet-Based Investigation on EM Scattering from Electrically Large Sea Surface With Two-Scale Profiles: Theoretical Model. IEEE Trans. Geosci. Electron. 2011, 49, 1967–1975. [Google Scholar] [CrossRef]
- Zhao, Y.; Yuan, X.-F.; Zhang, M.; Chen, H. Radar Scattering from the Composite Ship-Ocean Scene: Facet-Based Asymptotical Model and Specular Reflection Weighted Model. IEEE Trans. Antennas Propag. 2014, 62, 4810–4815. [Google Scholar] [CrossRef]
- Xu, F.; Jin, Y. Bidirectional Analytic Ray Tracing for Fast Computation of Composite Scattering From Electric-Large Target Over a Randomly Rough Surface. IEEE Trans. Antennas Propag. 2009, 57, 1495–1505. [Google Scholar] [CrossRef]
- Arnold-Bos, A.; Khenchaf, A.; Martin, A. Bistatic Radar Imaging of the Marine Environment—Part I: Theoretical Background. IEEE Trans. Geosci. Electron. 2007, 45, 3372–3383. [Google Scholar] [CrossRef]
- Toporkov, J.; Brown, G. Numerical simulations of scattering from time-varying, randomly rough surfaces. IEEE Trans. Geosci. Electron. 2000, 38, 1616–1625. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parametric Name | Parametric Value |
|---|---|
| Ship length | 52 m |
| Ship width | 5.9 m |
| Side wall draft depth | 3.5 m |
| Electromagnetic Wave Frequency | Wind Speed | Wind Direction | Ship Speed | Time |
|---|---|---|---|---|
| 14 GHz | 5 m/s | 180° | 5 m/s | 0 |
| Electromagnetic Wave Frequency | Incidence Angle | Wind Speed | Wind Direction | Ship Speed | Time |
|---|---|---|---|---|---|
| 14 GHz | 50° | 5 m/s | 180° | 5 m/s | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.-C.; Zhao, Y.; Wu, G.-S.; Ren, X.-C. Study on Doppler Spectra of Electromagnetic Scattering of Time-Varying Kelvin Wake on Sea Surface. Sensors 2022, 22, 7564. https://doi.org/10.3390/s22197564
Yang T-C, Zhao Y, Wu G-S, Ren X-C. Study on Doppler Spectra of Electromagnetic Scattering of Time-Varying Kelvin Wake on Sea Surface. Sensors. 2022; 22(19):7564. https://doi.org/10.3390/s22197564
Chicago/Turabian StyleYang, Tian-Ci, Ye Zhao, Guo-Shan Wu, and Xin-Cheng Ren. 2022. "Study on Doppler Spectra of Electromagnetic Scattering of Time-Varying Kelvin Wake on Sea Surface" Sensors 22, no. 19: 7564. https://doi.org/10.3390/s22197564