
Wide-Band Interference Mitigation in GNSS Receivers Using Sub-Band Automatic Gain Control †

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Background
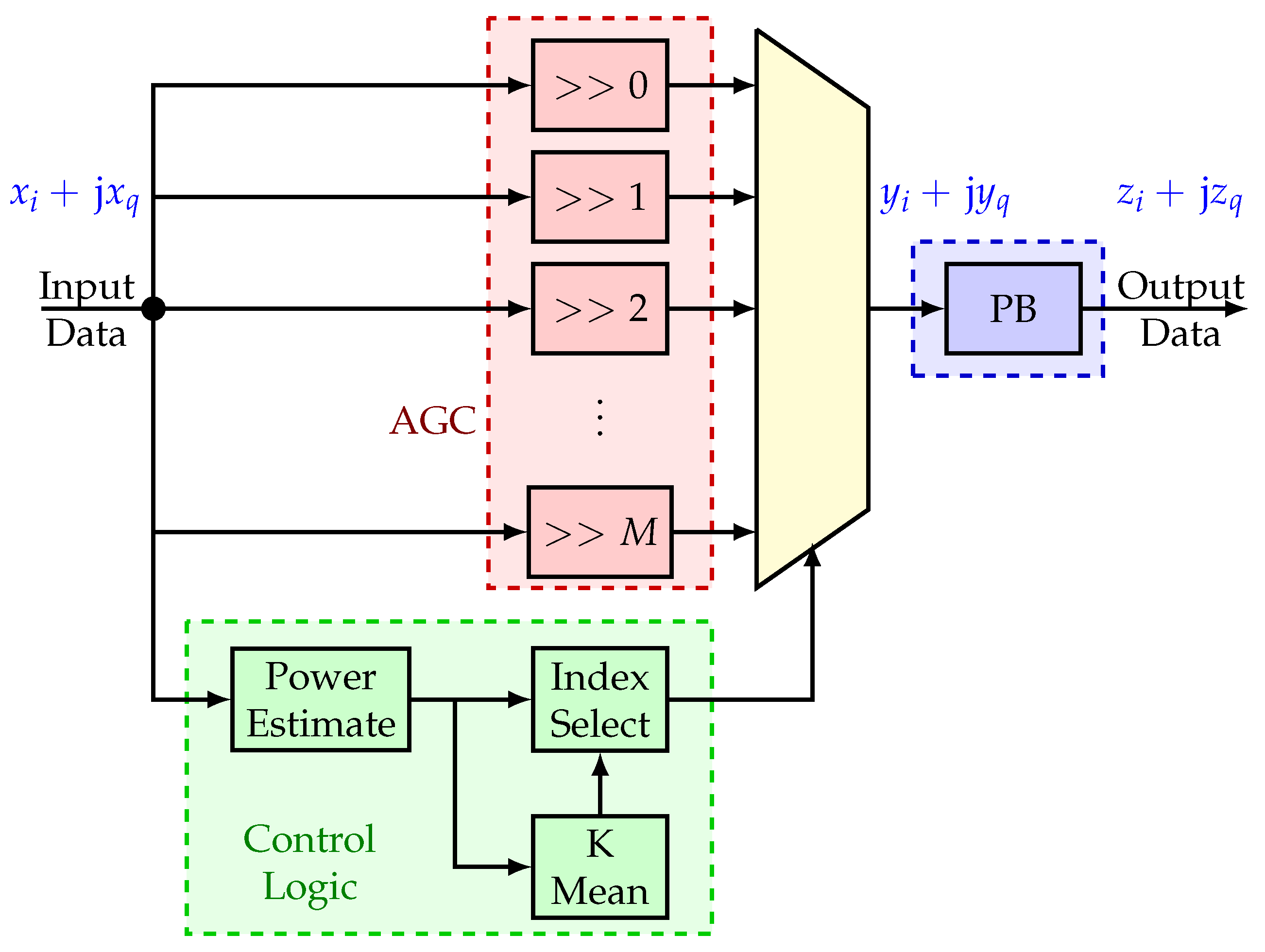
3. Design and Implementation
4. Test Setup
4.1. Physical Setup
- Roof Antenna: Receivers HE #1 and LC #1 are connected to the roof antenna without interference. These provide the interference-free ground truth signals.
- HDDM-AGC: Receivers HE #2 and LC #2 get GNSS and interference signals. The signals are received with an radio-frequency front-end (RFFE), where the HDDM-AGC mitigation is implemented in firmware as described in Section 3. Unfortunately, this platform does not have an onboard DAC. Therefore, the most significant bit of the I and Q components of the signal after mitigation is up-converted back to the L1 band using a Rohde&Schwarz signal generator. The mitigated signal is then passed to the two receivers. Note that as this process only uses a 1-bit DAC, significant quantization loss is introduced [25].
- No IM: Receivers HE #3 and LC #3 both have GNSS signals and interference signals, but no mitigation is enabled. The HE #3 receiver is explicitly configured to bypass all IM.
- With IM: In the HE #4 receiver wide-band IM capabilities are enabled. It allows a direct comparison of the HDDM-AGC to the state-of-the-art IM.
4.2. Test Procedure
- Interference #1—CW: single-tone interference at 1.57542 GHz,
- Interference #2—fast chirp: wide-band linear chirp with 10 MHz bandwidth and a chirp repetition rate of 10 µs,
- Interference #3—slow chirp: wide-band linear chirp with 10 MHz bandwidth and a chirp repetition rate of 100 µs,
- Interference #4—slow hopper: frequency hopper with a dwell time of 100 µs and a frequency range of 35 MHz,
- Interference #5—fast hopper: frequency hopper with a dwell time of 1 µs and a frequency range of 35 MHz,
- Interference #6—noise: filtered noise with 4 MHz bandwidth,
- Interference #7—noise: filtered noise with 35 MHz bandwidth,
- Interference #8—slow pulse: filtered pulsed noise with 35 MHz bandwidth, 50% duty cycle, and 1 ms pulse width,
- Interference #9—fast pulse: filtered pulsed noise with 35 MHz bandwidth, 50% duty cycle, and 100 µs pulse width.
4.3. Estimation of Interference to Noise Ratio
5. Results
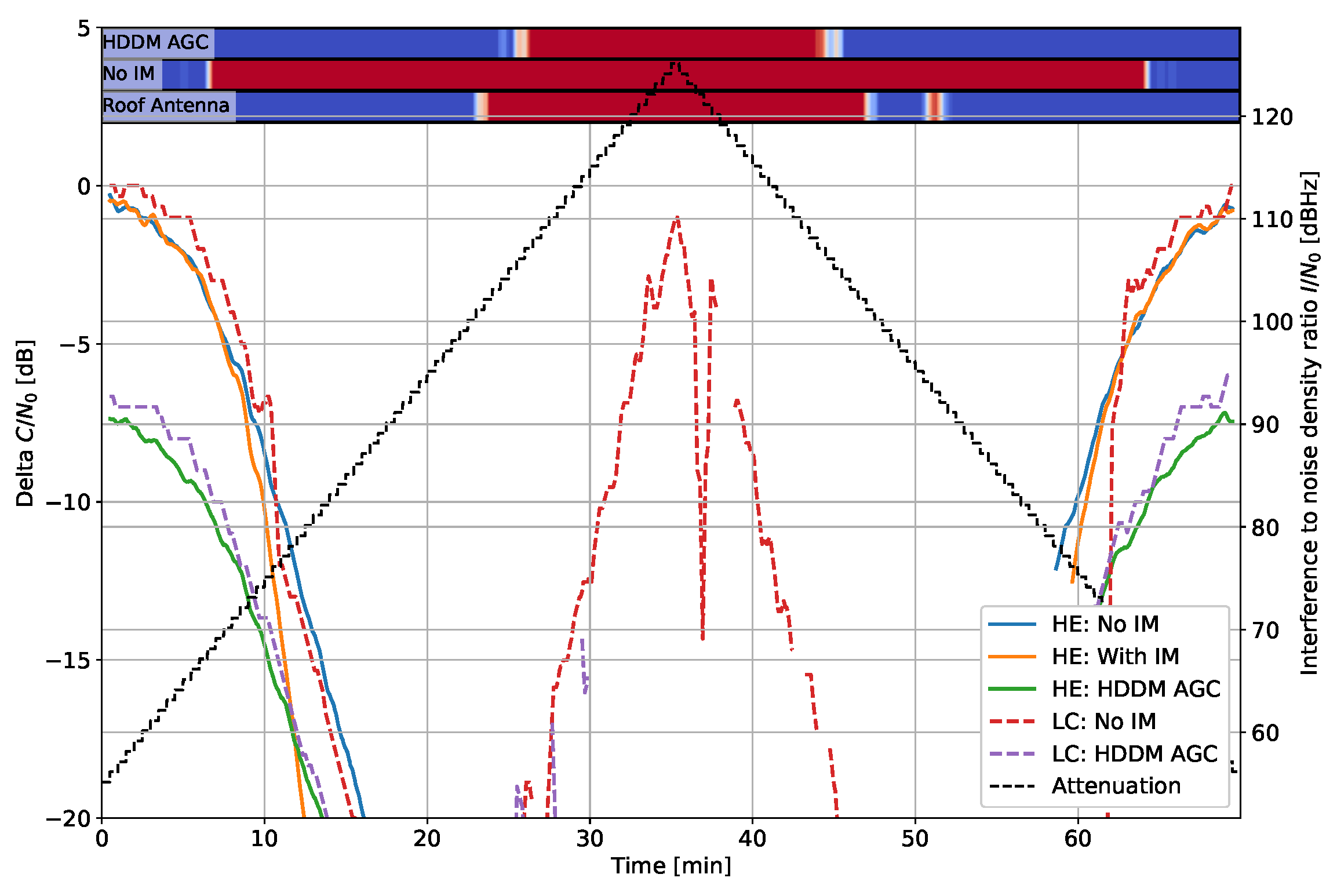
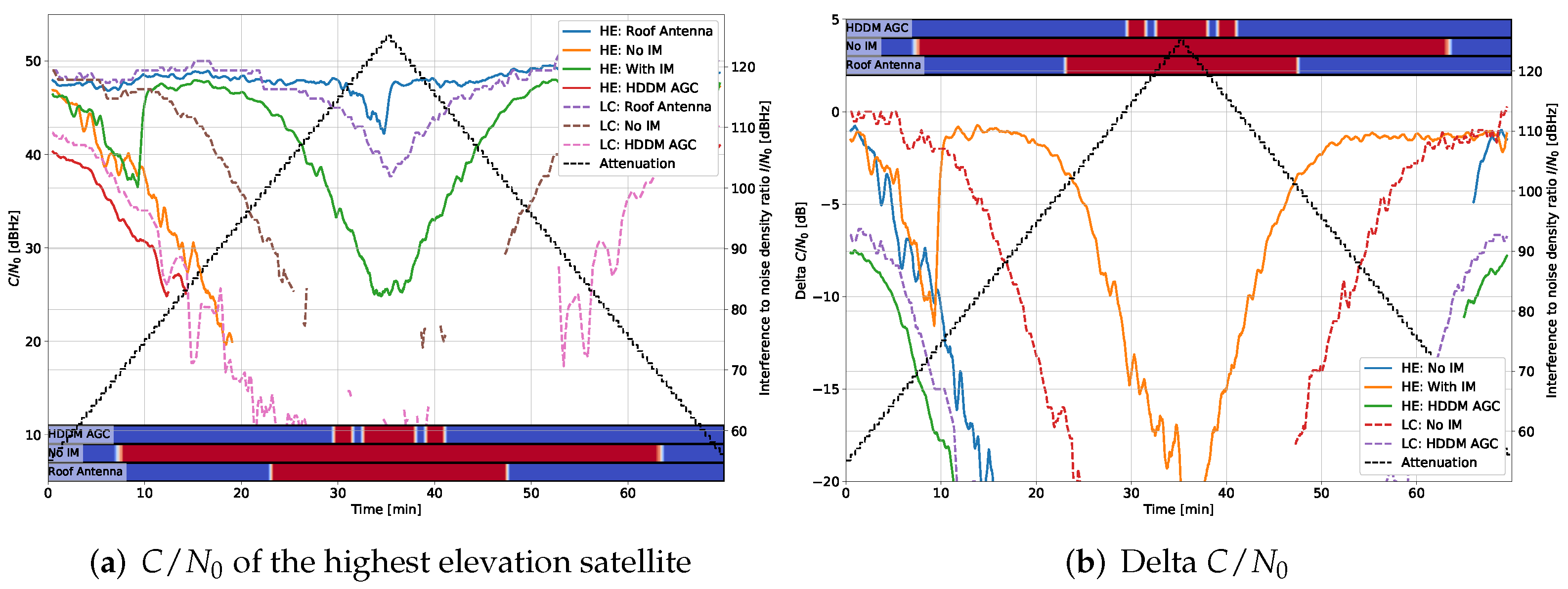
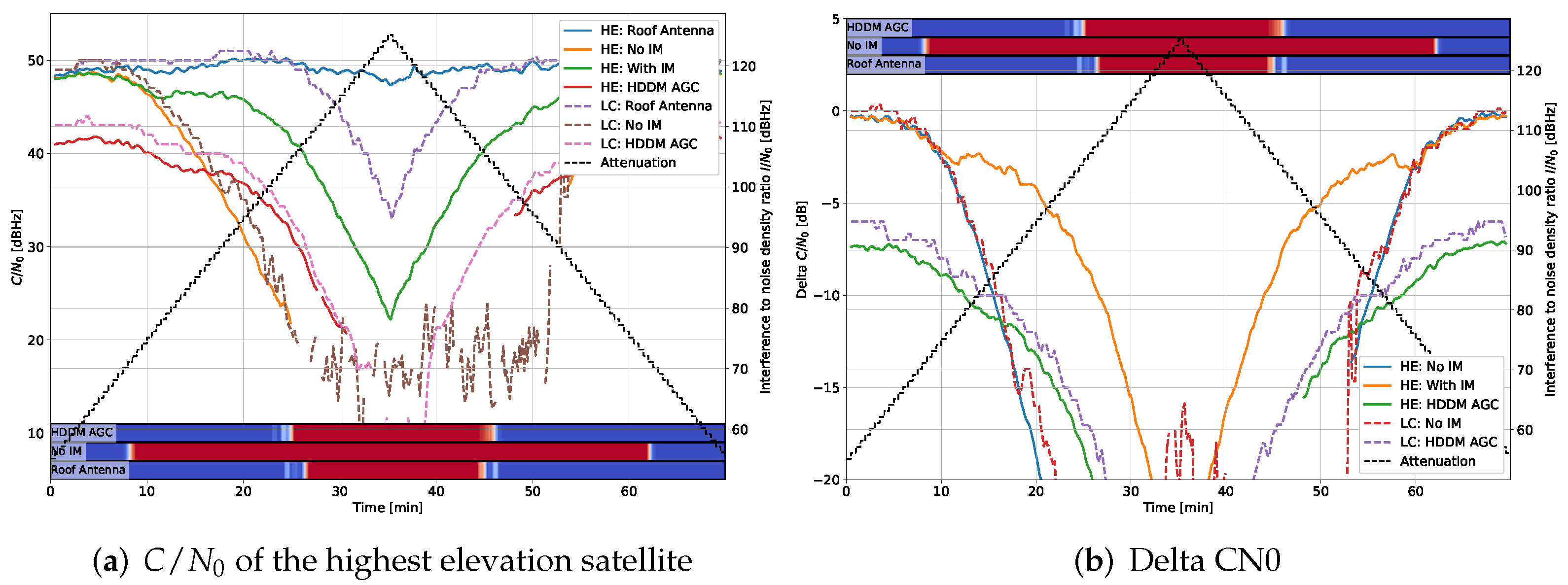
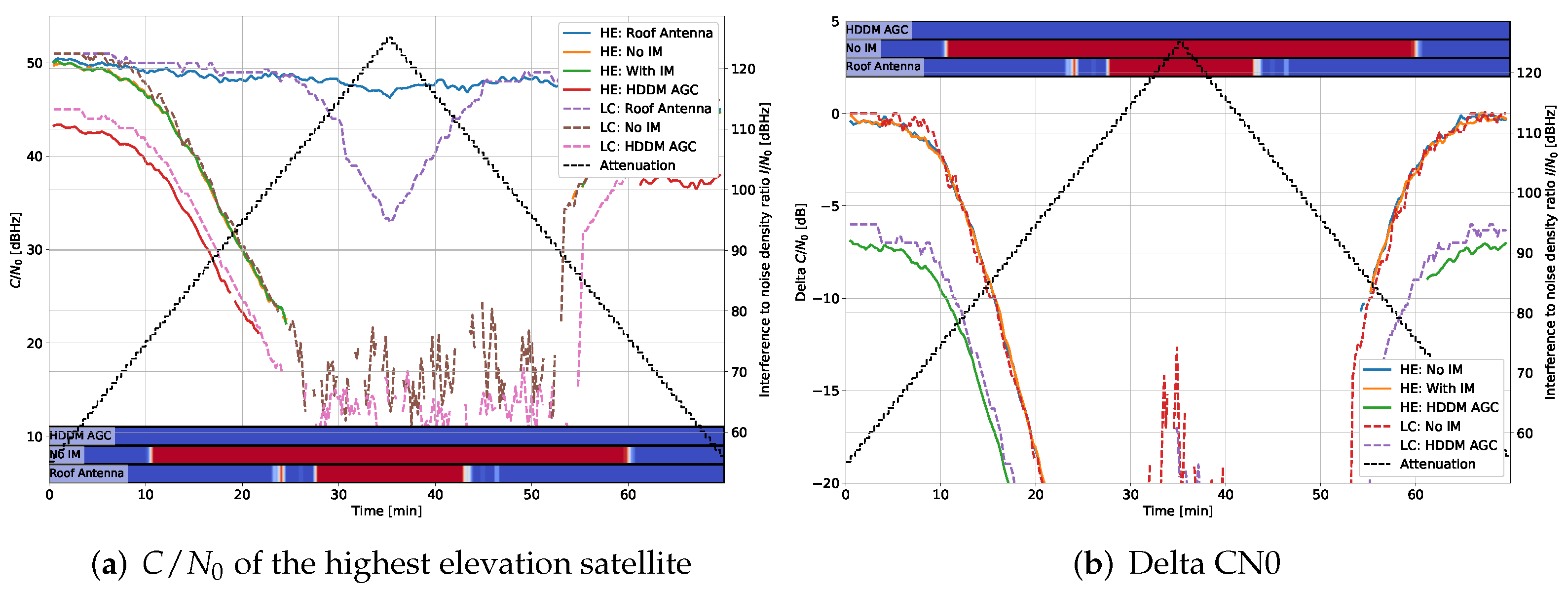
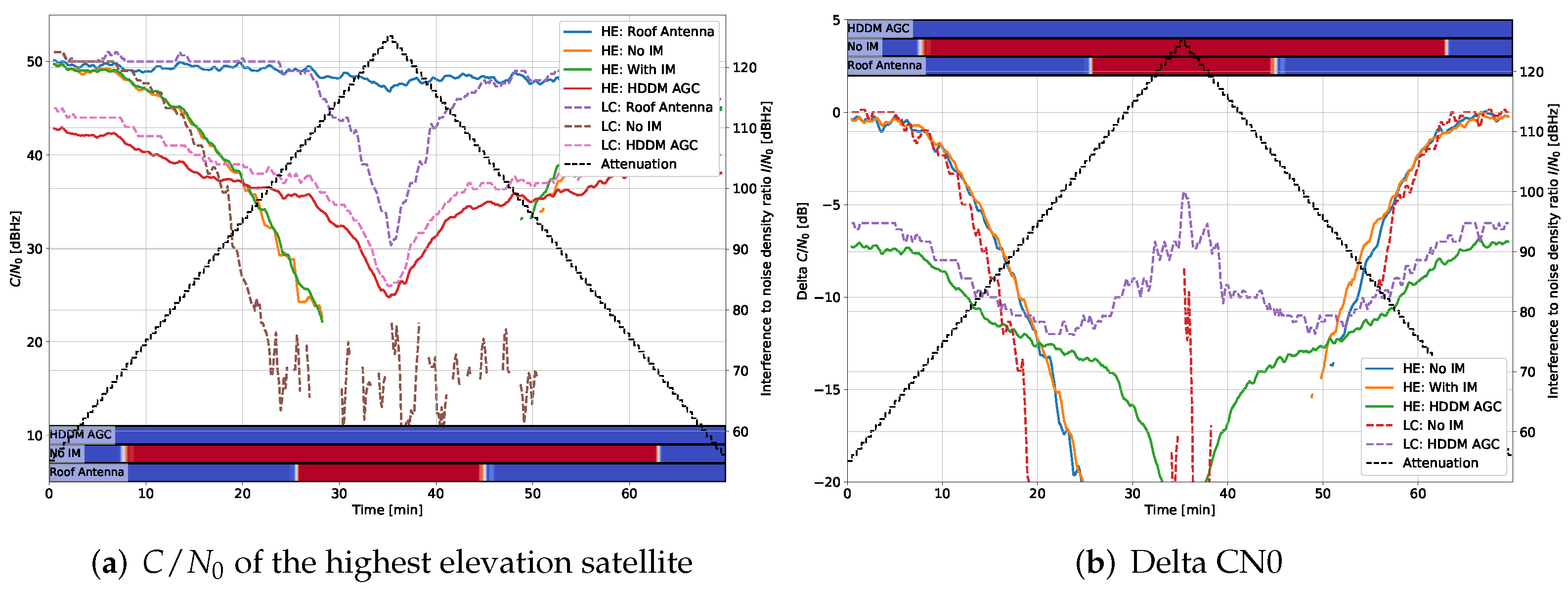
5.1. Tracking Results: C/N0
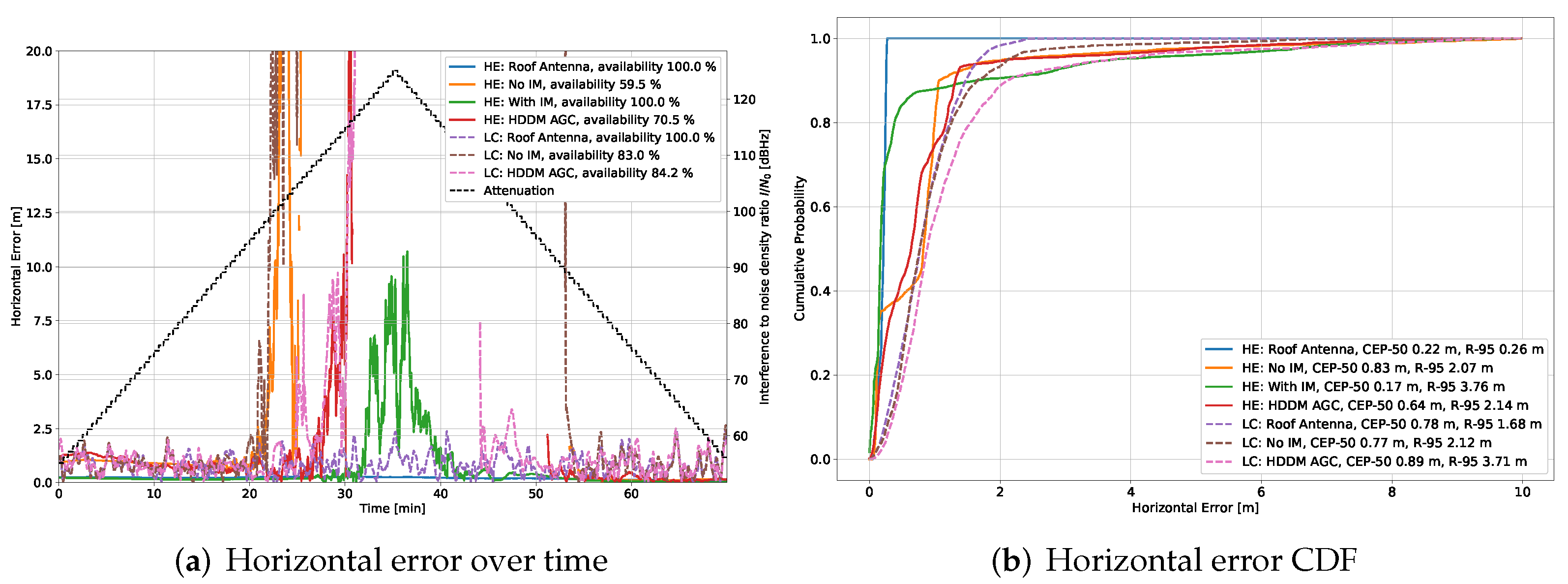
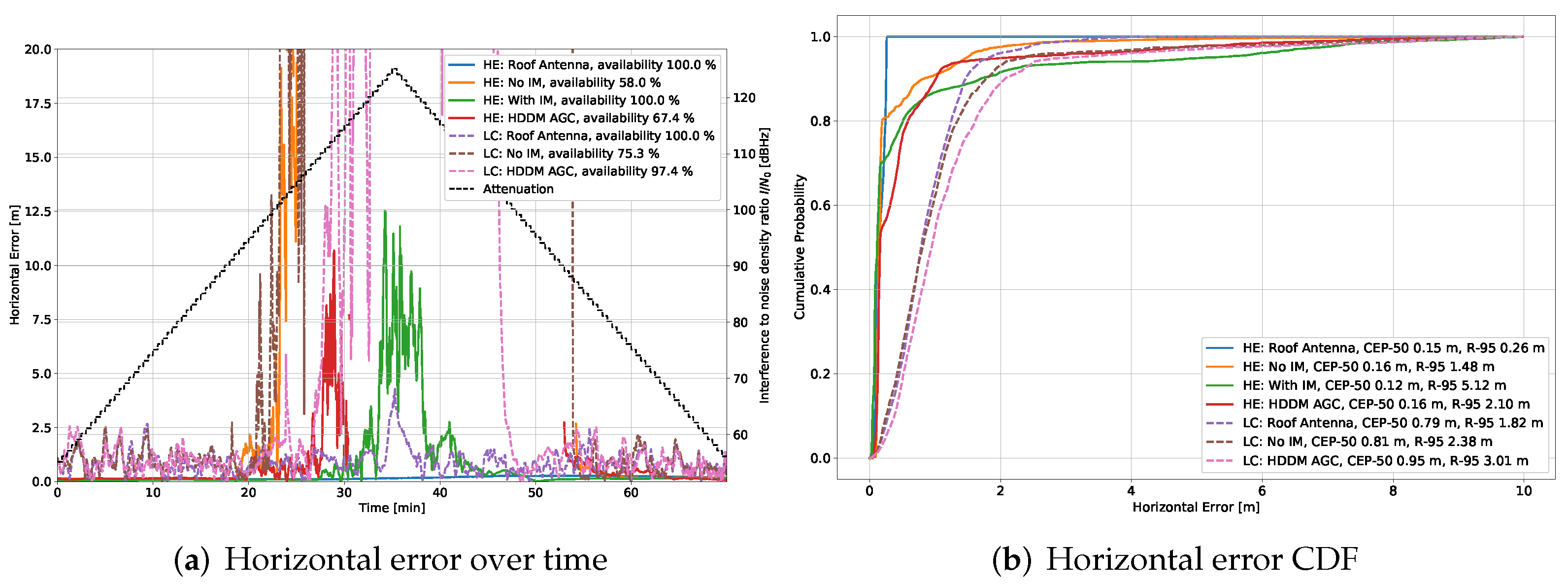
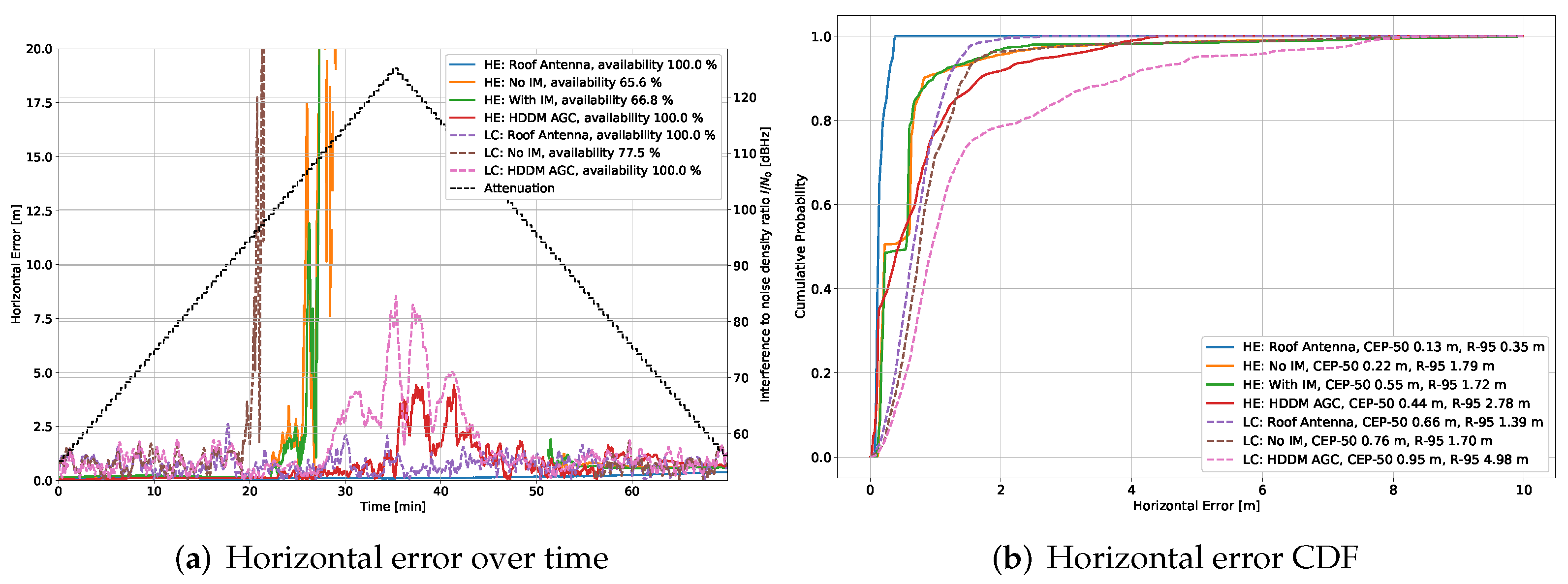
5.2. Position Results
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| carrier-to-noise density ratio | |
| interference-to-noise density ratio | |
| AGC | automatic gain control |
| ANF | adaptive notch filtering |
| ASIC | application-specific integrated circuit |
| CDF | cumulative distribution function |
| CDMA | code-division multiple access |
| CEP | circular error probable |
| COTS | commercial-off-the-shelf |
| CW | continuous-wave |
| DAC | digital-to-analog converter |
| DFT | discrete Fourier transform |
| DSP | digital signal processor |
| DVB-T | digital video broadcasting – terrestrial |
| DWT | discrete wavelet transform |
| FDAF | frequency-domain adaptive filtering |
| FFT | fast Fourier transform |
| FMCW | frequency-modulated continuous-wave |
| FPGA | field-programmable gate array |
| GNSS | global navigation satellite system |
| HDDM | high-rate DFT-based data manipulator |
| HE | high-end |
| HW | hardware |
| IDFT | inverse discrete Fourier transform |
| IFFT | inverse fast Fourier transform |
| IM | interference mitigation |
| INR | interference-to-noise ratio |
| IP | intellectual property |
| ISR | interference-to-signal ratio |
| KLT | Karhunen-Loève transform |
| LC | low-cost |
| ML | machine learning |
| PB | pulse blanker |
| PSD | power spectral density |
| PVT | position, velocity, and time |
| RF | radio-frequency |
| RFFE | radio-frequency front-end |
| RTL | register-transfer level |
| SBAS | satellite-based augmentation system |
| SSC | spectral separation coefficient |
| SWAP | size, weight, and power |
| VHDL | very-high-speed integrated circuit hardware description language |
Appendix A. Tracking Results GPS L1/CA









Appendix B. Tracking Results Galileo E1BC









Appendix C. Position Results









References
- Eliardsson, P.; Alexandersson, M.; Pattinson, M.; Hill, S.; Waern, A.; Ying, Y.; Fryganiotis, D. Results from measuring campaign of electromagnetic interference in GPS L1-band. In Proceedings of the 2017 International Symposium on Electromagnetic Compatibility—EMC EUROPE, Angers, France, 4–7 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Van der Merwe, J.R.; Meister, D.; Otto, C.; Stahl, M.; Rügamer, A.; Etxezarreta Martinez, J.; Felber, W. GNSS interference monitoring and characterisation station. In Proceedings of the 2017 European Navigation Conference (ENC), Lausanne, Switzerland, 9–12 May 2017; pp. 170–178. [Google Scholar] [CrossRef]
- Bartl, S.; Berglez, P.; Hofmann-Wellenhof, B. GNSS interference detection, classification and localization using Software-Defined Radio. In Proceedings of the 2017 European Navigation Conference (ENC), Lausanne, Switzerland, 9–12 May 2017; pp. 159–169. [Google Scholar] [CrossRef]
- Marcos, E.P.; Caizzone, S.; Konovaltsev, A.; Cuntz, M.; Elmarissi, W.; Yinusa, K.; Meurer, M. Interference awareness and characterization for GNSS maritime applications. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 908–919. [Google Scholar] [CrossRef]
- Hashemi, A.; Thombre, S.; Giorgia Ferrara, N.; Zahidul, M.; Bhuiyan, H.; Pattinson, M. STRIKE3-Case Study for Standardized Testing of Timing-Grade GNSS Receivers Against Real-World Interference Threats. In Proceedings of the 2019 International Conference on Localization and GNSS (ICL-GNSS), Nuremberg, Germany, 4–6 June 2019; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Van der Merwe, J.R.; Garzia, F.; Rügamer, A.; Felber, W. High-rate DFT-based Data Manipulator (HDDM) Algorithm for Effective Interference Mitigation. In Proceedings of the IEEE/ION PLANS, Portland, OR, USA, 20–23 April 2020. [Google Scholar]
- Raimondi, M.; Julien, O.; Macabiau, C.; Bastide, F. Mitigating Pulsed Interference Using Frequency Domain Adaptive Filtering. In Proceedings of the 19th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2006), Fort Worth, TX, USA, 26–29 September 2006. [Google Scholar]
- Musumeci, L.; Dovis, F. A comparison of transformed-domain techniques for pulsed interference removal on GNSS signals. In Proceedings of the 2012 International Conference on Localization and GNSS, Starnberg, Germany, 25–27 June 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Ojeda, O.A.Y.; Grajal, J.; Lopez-Risueno, G. Analytical Performance of GNSS Receivers using Interference Mitigation Techniques. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 885–906. [Google Scholar] [CrossRef]
- Garzia, F.; Van der Merwe, J.R.; Rügamer, A.; Felber, W. Hardware Implementation and Evaluation of the HDDM. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020. [Google Scholar]
- Garzia, F.; Van der Merwe, J.R.; Rügamer, A.; Urquijo, S.; Taschke, S.; Felber, W. Sub-Band AGC-Based Interference Mitigation. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- van der Merwe, J.R.; Garzia, F.; Rügamer, A.; Felber, W. Advanced and versatile signal conditioning for GNSS receivers using the high-rate DFT-based data manipulator (HDDM). NAVIGATION J. Inst. Navig. 2021, 68, 779–797. [Google Scholar] [CrossRef]
- Garzia, F.; Van der Merwe, J.R.; Rügamer, A.; Urquijo, S.; Felber, W. HDDM Hardware Evaluation for Robust Interference Mitigation. Sensors 2020, 20, 6492. [Google Scholar] [CrossRef] [PubMed]
- Van der Merwe, J.R.; Garzia, F.; Saad, M.; Kreh, B.; Rügamer, A.; Monroy Gonzalez Plata, R.; Felber, W. Receiver Bandwidth Compression for Multi-GNSS Signal Processing. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Nashville, TN, USA, 21–25 September 2020. [Google Scholar]
- Zhang, Y.; Wu, H.; Gao, Y. Transform Domain Interference Suppression in GPS/BD-2 Receiver Based on Fractional Fourier Transform. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013. [Google Scholar]
- Van der Merwe, J.R.; Rügamer, A.; Garzia, F.; Felber, W.; Wendel, J. Evaluation of mitigation methods against COTS PPDs. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 920–930. [Google Scholar] [CrossRef]
- Borio, D.; Cano, E. Optimal Global Navigation Satellite System pulse blanking in the presence of signal quantisation. IET Signal Process. 2013, 7, 400–410. [Google Scholar] [CrossRef]
- Panchalard, R.; Koseeyaporn, J.; Wardkein, P. State-Space Kalman Adaptive IIR Notch Filter. In Proceedings of the 2006 International Conference on Communications, Circuits and Systems, Guilin, China, 25–28 June 2006; Volume 1, pp. 206–210. [Google Scholar] [CrossRef]
- Borio, D.; O’Driscoll, C.; Fortuny, J. Tracking and Mitigating a Jamming Signal with an Adaptive Notch Filter. Inside GNSS 2014, 9, 67–73. [Google Scholar]
- Borio, D. Loop analysis of adaptive notch filters. IET Signal Process. 2016, 10, 659–669. [Google Scholar] [CrossRef]
- van der Merwe, J.R.; Vidal, I.C.; Garzia, F.; Lohan, E.S.; Nurmi, J.; Felber, W. Resilient Interference Mitigation with Adaptive Frequency Locked Loop based Adaptive Notch Filtering. In Proceedings of the 2021 Navigation, Nanchang, China, 22–25 May 2021; pp. 1–18. [Google Scholar]
- van der Merwe, J.R.; Garzia, F.; Rügamer, A.; Vidal, I.C.; Felber, W. Adaptive notch filtering against complex interference scenarios. In Proceedings of the 2020 European Navigation Conference (ENC), Dresden, Germany, 23–24 November 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Dovis, F. GNSS Interference Threats and Countermeasures; Artech House GNSS Technology and Applications Series GNSS Interference, Threats, and Countermeasures; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- Borio, D.; Closas, P. Robust transform domain signal processing for GNSS. NAVIGATION J. Inst. Navig. 2019, 66, 305–323. [Google Scholar] [CrossRef] [Green Version]
- Hegarty, C.J. Analytical Model for GNSS Receiver Implementation Losses. Navigation 2011, 58, 29–44. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS: Principles and Applications, 2nd ed.; Artech House Mobile Communications Series; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- van der Merwe, J.R.; Rügamer, A.; Felber, W. Simultaneous Jamming and Navigation Pseudolite System. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–7. [Google Scholar] [CrossRef]
- van Diggelen, F. GPS Accuracy: Lies, Damn Lies and Statistics. GPS World 2007, 18, 41–45. [Google Scholar]
- Borio, D.; Gioia, C. GNSS interference mitigation: A measurement and position domain assessment. Navigation 2021, 68, 93–114. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Unit | Min Value | Max Value |
|---|---|---|---|
| Signal generator output power | dBm | −70 | 0 |
| dBHz | 51.54 | 121.54 | |
| INR for a 10 MHz bandwidth receiver | dB | −18.46 | 51.54 |
| INR for a 50 MHz bandwidth receiver | dB | −25.45 | 44.55 |
| Interference | High-End (HE) | Low-Cost (LC) | |||||
|---|---|---|---|---|---|---|---|
| Number | Roof | No IM | With IM | HDDM | Roof | No IM | HDDM |
| #1 CW | 100 | 30.5 | 100 | 28.7 | 100 | 71.1 | 68.9 |
| #2 Fast Chirp | 100 | 51.6 | 74.8 | 64.0 | 99.9 | 56.3 | 90.3 |
| #3 Slow Chirp | 100 | 35.5 | 75.5 | 72.9 | 100 | 81.1 | 90.7 |
| #4 Fast Hop | 100 | 59.5 | 100 | 70.5 | 100 | 83.0 | 84.2 |
| #5 Slow Hop | 100 | 58.0 | 100 | 67.4 | 100 | 75.3 | 97.4 |
| #6 4 MHz Noise | 100 | 43.5 | 35.3 | 40.0 | 100 | 51.0 | 48.5 |
| #7 35 MHz Noise | 100 | 56.5 | 57.5 | 43.8 | 100 | 82.3 | 83.9 |
| #8 Slow Pulse | 100 | 65.6 | 66.8 | 100 | 100 | 77.5 | 100 |
| #9 Fast Pulse | 100 | 64.4 | 86.8 | 100 | 100 | 60.4 | 99.7 |
| Min. #1 to #9 | 100 | 30.5 | 35.3 | 28.7 | 99.9 | 51.0 | 48.5 |
| Mean #1 to #9 | 100 | 51.7 | 77.4 | 65.3 | 100 | 70.9 | 84.8 |
| Max. #1 to #9 | 100 | 65.6 | 100 | 100 | 100 | 83.0 | 100 |
| Interference | High-End (HE) | Low-Cost (LC) | |||||
|---|---|---|---|---|---|---|---|
| Number | Roof | No IM | With IM | HDDM | Roof | No IM | HDDM |
| #1 CW | 0.43 | 0.42 | 0.58 | 1.49 | 1.56 | 2.42 | 8.22 |
| #2 Fast Chirp | 0.44 | 3.26 | 1.00 | 1.89 | 1.60 | 4.64 | 1.75 |
| #3 Slow Chirp | 0.47 | 1.01 | 0.67 | 1.10 | 2.37 | 2.12 | 3.22 |
| #4 Fast Hop | 0.26 | 2.07 | 3.76 | 2.14 | 1.68 | 2.12 | 3.71 |
| #5 Slow Hop | 0.26 | 1.48 | 5.12 | 2.10 | 1.82 | 2.38 | 3.01 |
| #6 4 MHz Noise | 0.55 | 3.80 | 0.73 | 2.61 | 3.48 | 5.01 | 4.07 |
| #7 35 MHz Noise | 0.30 | 1.37 | 1.91 | 3.44 | 1.73 | 3.78 | 3.61 |
| #8 Slow Pulse | 0.35 | 1.79 | 1.72 | 2.78 | 1.39 | 1.70 | 4.98 |
| #9 Fast Pulse | 0.42 | 2.50 | 1.14 | 5.63 | 1.61 | 2.49 | 3.99 |
| Min. #1 to #9 | 0.26 | 0.42 | 0.58 | 1.10 | 1.39 | 1.70 | 1.75 |
| Mean #1 to #9 | 0.39 | 1.97 | 1.85 | 2.58 | 1.92 | 2.96 | 4.06 |
| Max. #1 to #9 | 0.55 | 3.80 | 5.12 | 5.63 | 3.48 | 5.01 | 8.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
van der Merwe, J.R.; Garzia, F.; Rügamer, A.; Urquijo, S.; Contreras Franco, D.; Felber, W. Wide-Band Interference Mitigation in GNSS Receivers Using Sub-Band Automatic Gain Control. Sensors 2022, 22, 679. https://doi.org/10.3390/s22020679
van der Merwe JR, Garzia F, Rügamer A, Urquijo S, Contreras Franco D, Felber W. Wide-Band Interference Mitigation in GNSS Receivers Using Sub-Band Automatic Gain Control. Sensors. 2022; 22(2):679. https://doi.org/10.3390/s22020679
Chicago/Turabian Stylevan der Merwe, Johannes Rossouw, Fabio Garzia, Alexander Rügamer, Santiago Urquijo, David Contreras Franco, and Wolfgang Felber. 2022. "Wide-Band Interference Mitigation in GNSS Receivers Using Sub-Band Automatic Gain Control" Sensors 22, no. 2: 679. https://doi.org/10.3390/s22020679
APA Stylevan der Merwe, J. R., Garzia, F., Rügamer, A., Urquijo, S., Contreras Franco, D., & Felber, W. (2022). Wide-Band Interference Mitigation in GNSS Receivers Using Sub-Band Automatic Gain Control. Sensors, 22(2), 679. https://doi.org/10.3390/s22020679