
_Park.png)
Review on Functional Testing Scenario Library Generation for Connected and Automated Vehicles


Abstract
1. Introduction
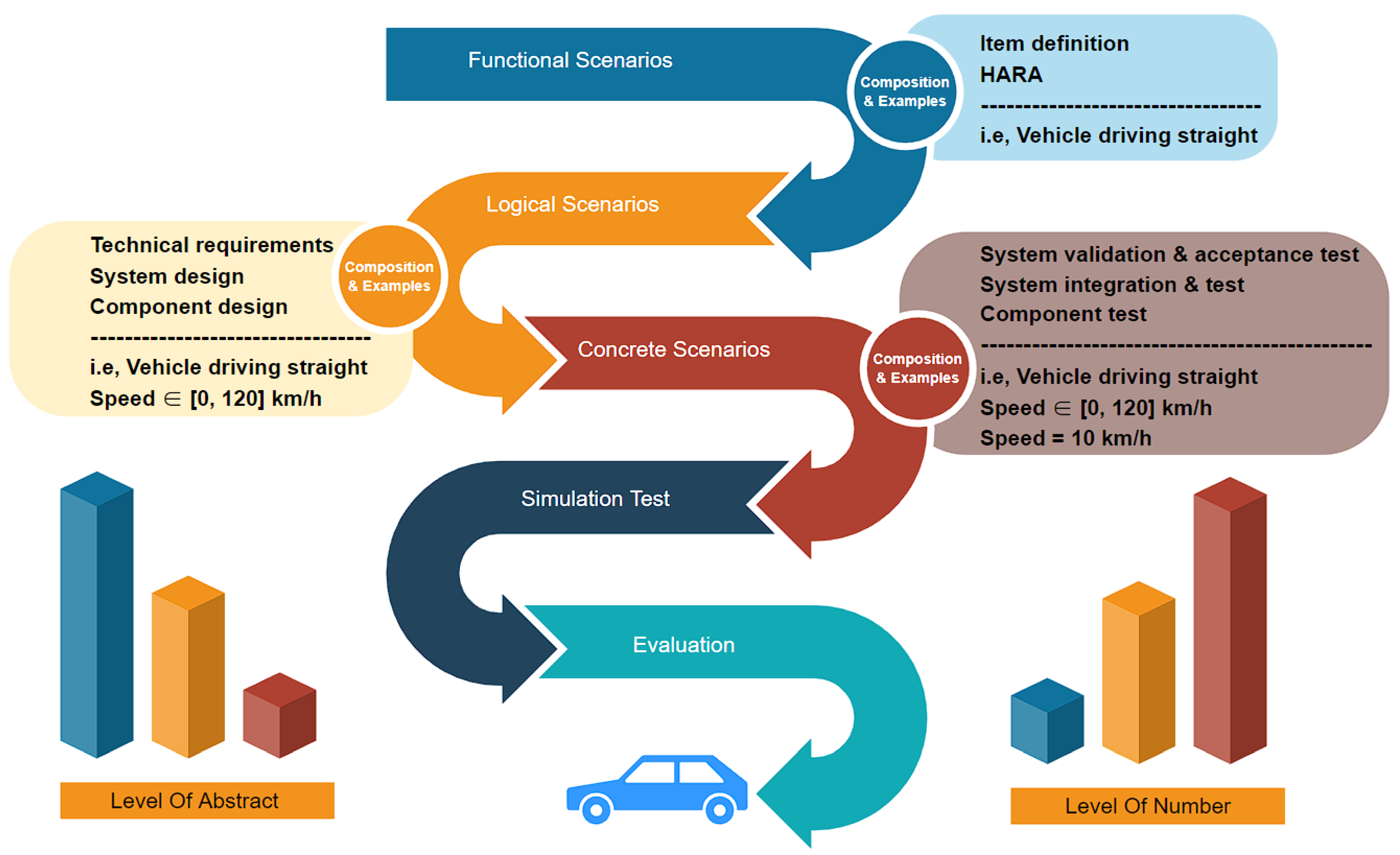
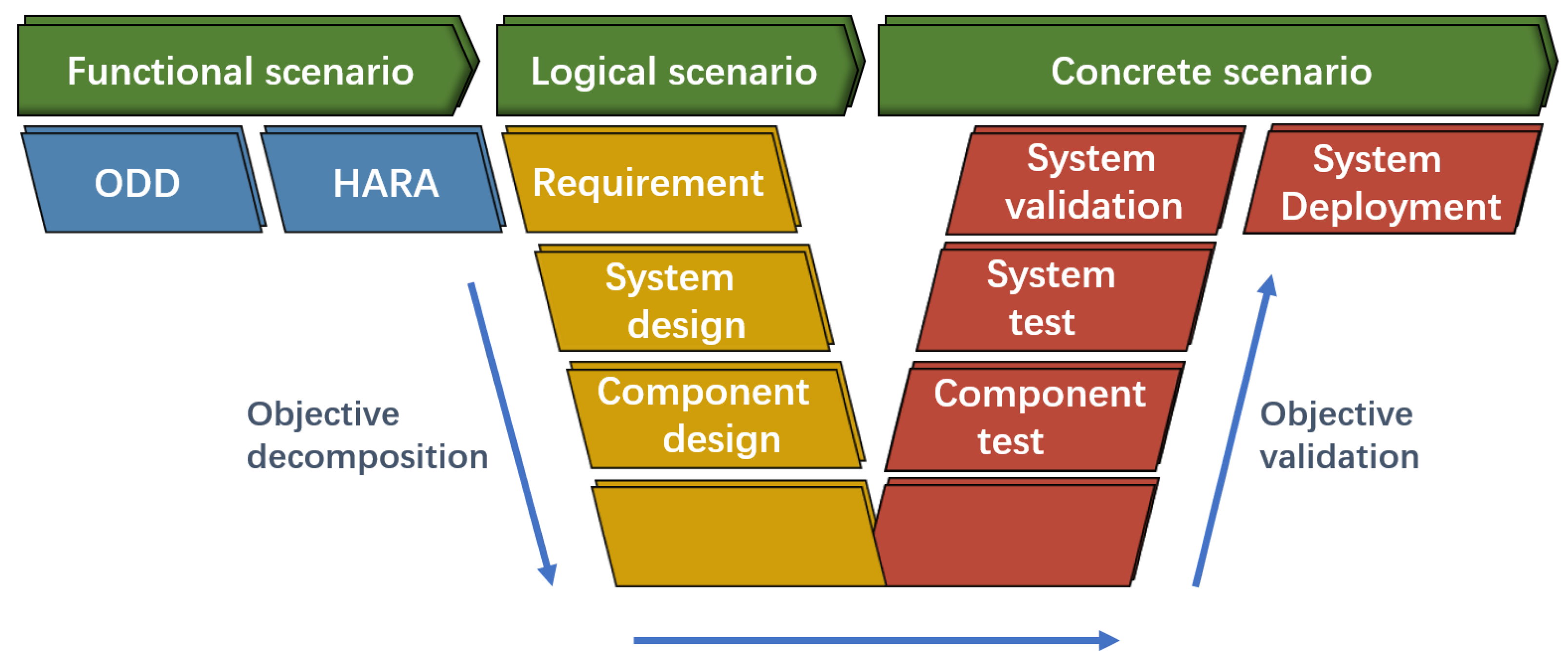
2. Scenario Definition
3. Road Generation
3.1. Actual Field Collection
- 1.
- High accuracy. The positioning accuracy can reach centimeter level, and the lane information is more accurate.
- 2.
- Highly real-time. Satellite maps and network maps cannot guarantee the real-time update of maps, and there are cases of information errors.
- 3.
- More information. Information such as lane lines and road information can be captured, which is difficult to extract in remote sensing.
- 1.
- High acquisition requirements. The sensor sensing ability drops abruptly in bad weather conditions.
- 2.
- Low automation. Collection vehicles or drones require human control.
- 3.
- High cost. The price of sensors is relatively high, as is the cost of manpower.
3.2. Road Extraction from Remote Sensing Imagery
3.3. Road Extraction from OpenStreetMap Files
4. Dynamic Scenario Generation
- 1.
- Combinatorial testing;
- 2.
- Knowledge-based generation;
- 3.
- Driving behavior-based generation;
- 4.
- Data-driven generation.
4.1. Combinatorial Testing
- 1.
- Generate functional scenarios. Determine the functions to be tested.
- 2.
- Generate logical scenarios. Set the range of values and dispersion of the parameters of interest for the specific functional scenario.
- 3.
- Generate concrete scenarios. According to the previously set parameter value range and dispersion, traverse the parameters to obtain the parameter combination of the scenario. At the same time, a filtering rule or direction of interest can be set during the traversal.
- 4.
- Generate formatted scenes. Based on the tested simulator, generate supported scene file formats, such as OpenSCENARIO.
4.2. Knowledge-Based Generation
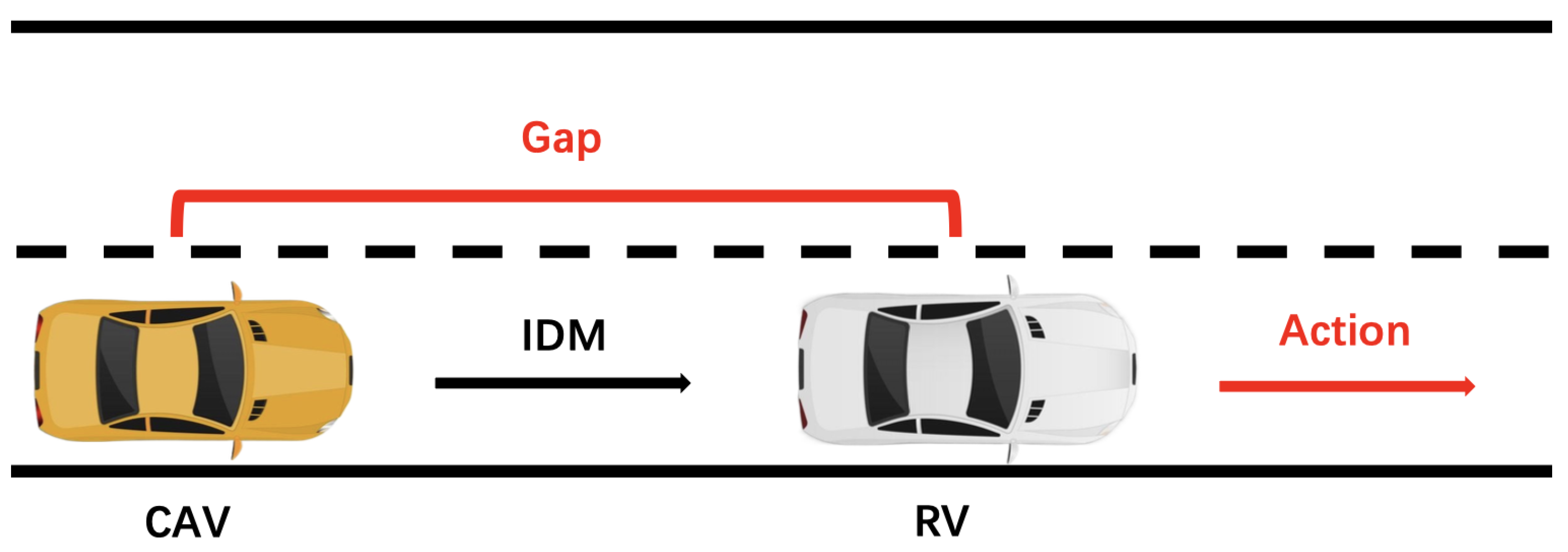
4.3. Driving Behavior-Based Generation
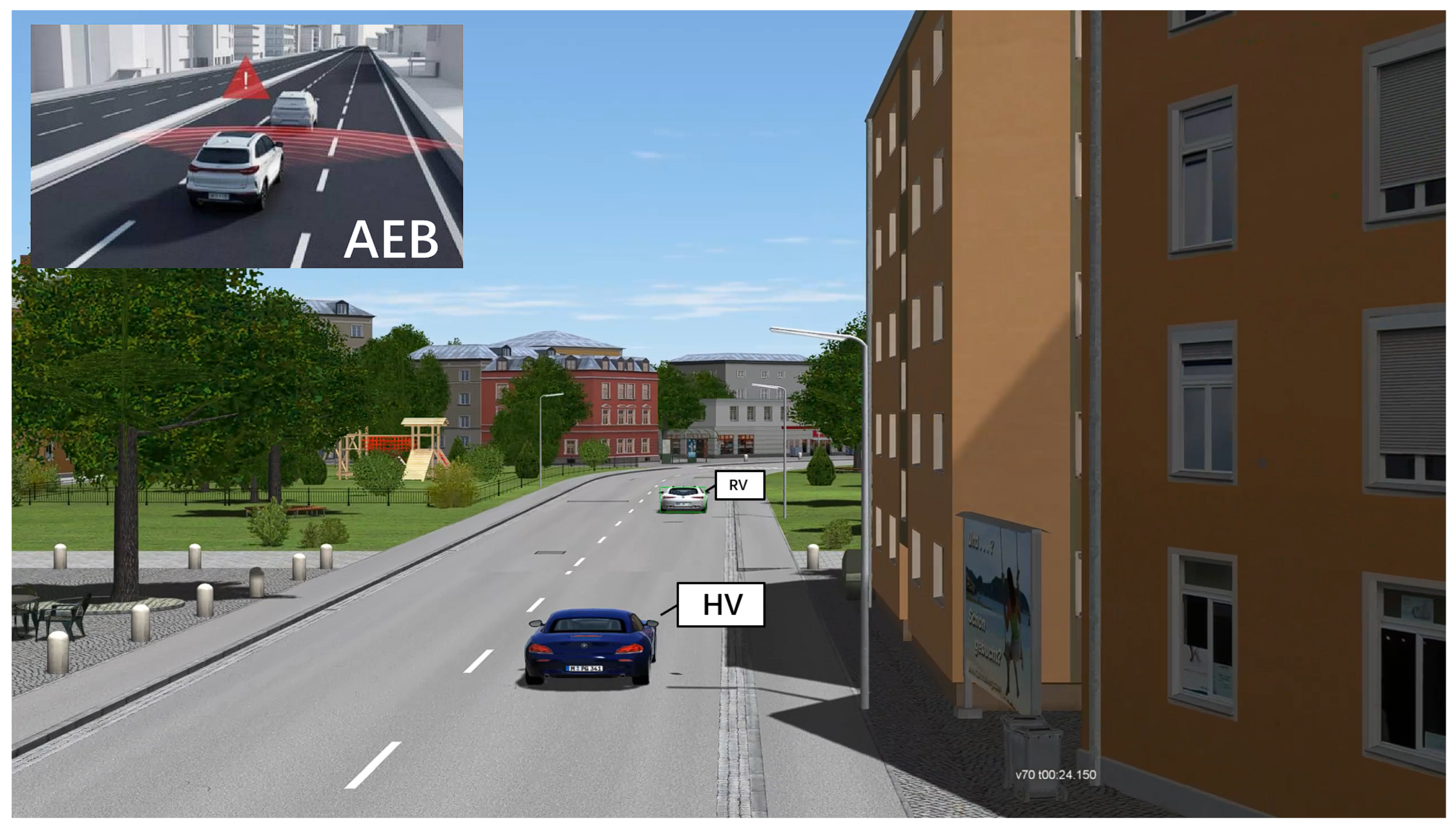
- 1.
- Set the motion state of the RV, such as uniform speed, or decelerate driving.
- 2.
- Simulate the driving of the HV using a driving model, such as the car-following model.
- 3.
- Adjust the driving model or model parameters, such as aggressive and conservative, start testing, and record vehicle data.
- 4.
- Convert the vehicle data into an OpenSCENARIO file and repeat the previous step.
4.4. Data-Driven Generation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kumar, V.R.; Yogamani, S.; Rashed, H.; Sitsu, G.; Witt, C.; Leang, I.; Milz, S.; Mäder, P. OmniDet: Surround View Cameras based Multi-task Visual Perception Network for Autonomous Driving. IEEE Robot. Autom. Lett. 2021, 6, 2830–2837. [Google Scholar] [CrossRef]
- Wu, P.; Chen, S.; Metaxas, D. MotionNet: Joint Perception and Motion Prediction for Autonomous Driving Based on Bird’s Eye View Maps. arXiv 2020, arXiv:2003.06754. [Google Scholar]
- Chen, J.; Xu, Z.; Tomizuka, M. End-to-end Autonomous Driving Perception with Sequential Latent Representation Learning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Brito, B.; Agarwal, A.; Alonso-Mora, J. Learning Interaction-aware Guidance Policies for Motion Planning in Dense Traffic Scenarios. arXiv 2021, arXiv:2107.04538. [Google Scholar]
- Hoel, C.J.; Wolff, K.; Laine, L. Tactical Decision-Making in Autonomous Driving by Reinforcement Learning with Uncertainty Estimation. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020. [Google Scholar]
- Kenney, B.J. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Gonzalez-Martín, M.; Sepulcre, M.; Molina-Masegosa, R.; Gozalvez, J. Analytical Models of the Performance of C-V2X Mode 4 Vehicular Communications. IEEE Trans. Veh. Technol. 2018, 68, 1155–1166. [Google Scholar] [CrossRef]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Malikopoulos, A.A.; Cassandras, C.G. Optimal Control And Coordination Of Connected And Automated Vehicles At Urban Traffic Intersections. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Narla, S.; Stowell, H.G. Connected AND Automated Vehicles. ITE J. 2019, 89, 28–30, 32–33. [Google Scholar]
- Mohammadian, S.; Zheng, Z.; Haque, M.; Bhaskar, A. Continuum Modelling of Freeway Traffic Flows in The Era of Connected and Automated Vehicles: A Critical Perspective and Research Needs. arXiv 2021, arXiv:2111.04955. [Google Scholar]
- Chalaki, B.; Malikopoulos, A.A. A Priority-Aware Replanning and Resequencing Framework for Coordination of Connected and Automated Vehicles. IEEE Control. Syst. Lett. 2021, 6, 1772–1777. [Google Scholar] [CrossRef]
- Wachenfeld, W.; Winner, H. The Release of Autonomous Vehicles; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Feng, S.; Yan, X.; Sun, H.; Feng, Y.; Liu, H.X. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment. Nat. Commun. 2021, 12, 748. [Google Scholar] [CrossRef] [PubMed]
- Schuldt, F.; Saust, F.; Lichte, B.; Maurer, M. Effiziente systematische Testgenerierung fur Fahrerassistenzsysteme in virtuellen Umgebungen-english title: Efficient Systematic Test Generation for Advanced Driver Assistance Systems in Virtual Environments. In Proceedings of the AAET-Automatisierungssysteme, Assistenzsysteme und Eingebettete Systeme fur Transportmittel, Braunschweig, Germany, 6–7 February 2013; pp. 114–134. [Google Scholar]
- Schuldt, F. Ein Beitrag fur den Methodischen Test von Automatisierten Fahrfunktionen mit Hilfe von Virtuellen Umgebungen-English Title: Towards Testing of Automated Driving Functions in Virtual Driving Environments. Ph.D. Thesis, Technische Universitat Braun-Schweig, Braunschweig, Germany, 2017. [Google Scholar]
- Kusari, A.; Li, P.; Yang, H.; Punshi, N.; Rasulis, M.; Bogard, S.; LeBlanc, D.J. Enhancing SUMO simulator for simulation based testing and validation of autonomous vehicles. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022. [Google Scholar]
- Menzel, T.; Bagschik, G.; Maurer, M. Scenarios for Development, Test and Validation of Automated Vehicles. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018. [Google Scholar]
- Fildes, B.; Keall, M.; Bos, N.; Lie, A.; Page, Y.; Pastor, C.; Pennisi, L.; Rizzi, M.; Thomas, P.; Tingvall, C. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes. Accid. Anal. Prev. 2015, 81, 24–29. [Google Scholar] [CrossRef] [PubMed]
- Bagschik, G.; Menzel, T.; Maurer, M. Ontology based Scene Creation for the Development of Automated Vehicles. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018. [Google Scholar]
- Dupuis, M.; Strobl, M.; Grezlikowski, H. OpenDRIVE 2010 and Beyond – Status and Future of the de facto Standard for the Description of Road Networks. Actes Inrets 2010. Available online: https://www.ifsttar.fr/fileadmin/user_upload/editions/inrets/Actes/Actes_INRETS_A126.pdf#page=233 (accessed on 30 September 2022).
- Jullien, J.M.; Martel, C.; Vignollet, L.; Wentland, M. OpenScenario: A Flexible Integrated Environment to Develop Educational Activities Based on Pedagogical Scenarios. In Proceedings of the Ninth IEEE International Conference on Advanced Learning Technologies, Riga, Latvia, 15–17 July 2009. [Google Scholar]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. arXiv 2017, arXiv:1711.03938. [Google Scholar]
- Shi, Y.; Shibasaki, R.; Shi, Z.C. Towards Automatic Road Mapping by Fusing Vehicle-Borne Multi-Sensor Data. 2008. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.184.2251&rep=rep1&type=pdf (accessed on 30 September 2022).
- Liang, J.; Homayounfar, N.; Ma, W.C.; Wang, S.; Urtasun, R. Convolutional Recurrent Network for Road Boundary Extraction. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Homayounfar, N.; Ma, W.C.; Lakshmikanth, S.K.; Urtasun, R. Hierarchical Recurrent Attention Networks for Structured Online Maps. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Zeybek, M.; Biici, S. Geometric Feature Extraction of Road from UAV Based Point Cloud Data. In Innovations in Smart Cities Applications Volume 4, Proceedings of the The Proceedings of the International Conference on Smart City Applications, Safranbolu, Turkey, 27–29 November 2021; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Ferns, D.C.; Barrett, E.C.; Curtis, L.F. Introduction to Environmental Remote Sensing. J. Appl. Ecol. 1983, 20, 1003. [Google Scholar] [CrossRef]
- Leckie, D.G. Advances in Remote Sensing Technologies for Forest Surveys and Management. Can. J. For. Res. 1990, 20, 464–483. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, K.; Kimball, J.S.; Running, S.W. A Review of Remote Sensing Based Actual Evapotranspiration Estimation: A Review of Remote Sensing Evapotranspiration. Wiley Interdiscip. Rev. Water 2016, 3, 834–853. [Google Scholar] [CrossRef]
- Xiao, J.I.; Chevallier, F.; Gomez, C.; Guanter, L.; Hicke, J.A.; Huete, A.R.; Ichii, K.; Ni, W.; Pang, Y.; Rahman, A.F.; et al. Remote Sensing of The Terrestrial Carbon Cycle: A Review of Advances Over 50 Years. Remote Sens. Environ. 2019, 233, 111383. [Google Scholar] [CrossRef]
- Wei, Y.; Xia, W.; Lin, M.; Huang, J.; Ni, B.; Dong, J.; Zhao, Y.; Yan, S. HCP: A Flexible CNN Framework For Multi-label Image Classification. IEee Trans. Pattern Anal. Mach. Intell. 2015, 38, 1901–1907. [Google Scholar] [CrossRef]
- Demir, I.; Koperski, K.; Lindenbaum, D.; Pang, G.; Huang, J.; Basu, S.; Hughes, F.; Tuia, D.; Raska, R. Deepglobe 2018: A challenge to parse the earth through satellite images. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 172–181. [Google Scholar]
- OFilin, l.; Zapara, A.; Panchenko, S. Road Detection with EOSResUNet and Post Vectorizing Algorithm. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Wang, W.; Yang, N.; Zhang, Y.; Wang, F.; Cao, T.; Eklund, P. A review of road extraction from remote sensing images. J. Traffic Transp. Eng. (English Ed.) 2016, 3, 271–282. [Google Scholar] [CrossRef]
- Yager, N.; Sowmya, A. Support Vector Machines for Road Extraction from Remotely Sensed Images. In Computer Analysis of Images and Patterns, Proceedings of the International Conference on Computer Analysis of Images and Patterns, Groningen, The Netherlands, 25–27 August 2003; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Yang, C.; Duraiswami, R.; DeMenthon, D.; Davis, L. Mean-shift analysis using quasiNewton methods. In Proceedings of the 2003 International Conference on Image Processing (Cat. No.03CH37429), Barcelona, Spain, 14–17 September 2003. [Google Scholar]
- Pawar, V.; Zaveri, M. Graph based K-nearest neighbor minutiae clustering for fingerprint recognition. In Proceedings of the 2014 10th International Conference on Natural Computation (ICNC), Xiamen, China, 19–21 August 2014. [Google Scholar]
- Xu, Y.; Xie, Z.; Feng, Y.; Chen, Z. Road Extraction from High-Resolution Remote Sensing Imagery Using Deep Learning. Remote Sens. 2018, 10, 1461. [Google Scholar] [CrossRef]
- Xin, J.; Zhang, X.; Zhang, Z.; Fang, W. Road Extraction of High-Resolution Remote Sensing Images Derived from DenseUNet. Remote Sens. 2019, 11, 2499. [Google Scholar] [CrossRef]
- Google. Google Earth. Available online: http://www.google.cn/intl/zh-CN/earth/ (accessed on 12 September 2015).
- Abdollahi, A.; Pradhan, B.; Alamri, A. RoadVecNet: A new approach for simultaneous road network segmentation and vectorization from aerial and google earth imagery in a complex urban set-up. Gisci. Remote Sens. 2021, 58, 1151–1174. [Google Scholar] [CrossRef]
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, Y. A Hardware-in-the-Loop V2X Simulation Framework: CarTest. Sensors 2022, 22, 5019. [Google Scholar] [CrossRef] [PubMed]
- Klischat, M.; Liu, E.I.; Holtke, F.; Althoff, M. Scenario Factory: Creating Safety-Critical Traffic Scenarios for Automated Vehicles. In Proceedings of the 2020 IEEE International Conference on Intelligent Transportation Systems, Rhodes, Greece, 20–23 September 2020. [Google Scholar]
- Wang, H.; Wang, J.; Yu, P.; Chen, X.; Wang, Z. Extraction and construction algorithm of traffic road network model based on OSM file. J. Phys. Conf. Ser. 2021, 1848, 012084. [Google Scholar] [CrossRef]
- Langner, J.; Bach, J.; Ries, L.; Otten, S.; Holzäpfel, M.; Sax, E. Estimating the Uniqueness of Test Scenarios derived from Recorded Real-World-Driving-Data using Autoencoders. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018. [Google Scholar]
- Yan, Y.; Zhu, X.; Liao, M.; Ma, Z. Danger Degree Evaluation Method of Crossroad Scenario Based on Naturalistic Driving Analysis. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1435–1440. [Google Scholar]
- Bach, J.; Langner, J.; Otten, S.; Sax, E.; Holzäpfel, M. Test Scenario Selection for System-Level Verification and Validation of Geolocation-Dependent Automotive Control Systems. In Proceedings of the 2017 IEEE International Conference on Engineering, Technology and Innovation/International Technology Management Conference (ICE/ITMC), Madeira, Portugal, 27–29 June 2017. [Google Scholar]
- Ulbrich, S.; Menzel, T.; Reschka, A.; Schuldt, F.; Maurer, M. Defining and Substantiating the Terms Scene, Situation, and Scenario for Automated Driving. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Tatar, M. Test and Validation of Advanced Driver Assistance Systems— Automated Search for Critical Scenarios. Atzelektronik Worldw. 2016, 11, 54–57. [Google Scholar] [CrossRef]
- Kehrer, M.; Pitz, J.; Rothermel, T.; Reuss, H.C. Framework for Interactive Testing and Development of Highly Automated Driving Functions; Springer Vieweg: Wiesbaden, Germany, 2018. [Google Scholar]
- Xia, Q.; Duan, J.; Gao, F.; Chen, T.; Yang, C. SAE Technical Paper Series [SAE International Intelligent and Connected Vehicles Symposium-(SEP. 26, 2017)] SAE Technical Paper Series-Automatic Generation Method of Test Scenario for ADAS Based on Complexity; SAE Technical Paper Series 2017-01-1992; SAE International: Warrendale, PA, USA, 2017; Volume 1. [Google Scholar]
- Miao, L.; Chen, S.F.; Hsu, Y.L.; Hua, K.L. How Does C-V2X Help Autonomous Driving to Avoid Accidents? Sensors 2022, 22, 686. [Google Scholar] [CrossRef]
- Wotawa, F.; Pill, I. Testing Configuration Knowledge-Bases. Configuration Workshop 2014. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.663.5772&rep=rep1&type=pdf#page=47 (accessed on 30 September 2022).
- Tsatsanifos, G.; Sacharidis, D.; Sellis, T.K. On enhancing scalability for distributed RDF/S stores. In Proceedings of the EDBT 2011, 14th International Conference on Extending Database Technology, Uppsala, Sweden, 21–24 March 2011. [Google Scholar]
- Gruber, T.R. Toward principles for the design of ontologies used for knowledge sharing? Int. J. Hum.-Comput. Stud. 1995, 43, 907–928. [Google Scholar] [CrossRef]
- Gruber, T.R. A Translational Approach to Portable Ontologies. Knowl. Acquis. 1993, 5, 199–220. [Google Scholar] [CrossRef]
- Uschold, M.; Gruninger, M. Ontologies: Principles, methods and applications. Knowl. Eng. Rev. 1996, 11, 93–136. [Google Scholar] [CrossRef]
- Fensel, D. Ontologies: A Silver Bullet for Knowledge Management and Electronic Commerce. Kybernetes 2004, 33, 7. Available online: https://www.emerald.com/insight/content/doi/10.1108/k.2004.06733gae.001/full/html (accessed on 30 September 2022).
- Schuldt, F.; Reschka, A.; Maurer, M. A method for an efficient, systematic test case generation for advanced driver assistance systems in virtual environments. In Automotive Systems Engineering II; Winner, H., Prokop, G., Maurer, M., Eds.; Springer International Publishing AG: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Klück, F.; Li, Y.; Nica, M.; Tao, J.; Wotawa, F. Using Ontologies for Test Suites Generation for Automated and Autonomous Driving Functions. In Proceedings of the 2018 IEEE International Symposium on Software Reliability Engineering Workshops (ISSREW), Memphis, TN, USA, 15–18 October 2018. [Google Scholar]
- Li, Y.; Tao, J.; Wotawa, F. Ontology-based Test Generation for Automated and Autonomous Driving Functions. Inf. Softw. Technol. 2019, 117, 106200. [Google Scholar] [CrossRef]
- Tao, J.; Li, Y.; Wotawa, F.; Felbinger, H.; Nica, M. On the Industrial Application of Combinatorial Testing for Autonomous Driving Functions. In Proceedings of the 2019 IEEE International Conference on Software Testing, Verification and Validation Workshops (ICSTW), Xi’an, China, 22–23 April 2019. [Google Scholar]
- Steimle, M.; Menzel, T.; Maurer, M. Toward a Consistent Taxonomy for Scenario-Based Development and Test Approaches for Automated Vehicles: A Proposal for a Structuring Framework, a Basic Vocabulary, and Its Application. IEEE Access 2021, 9, 147828–147854. [Google Scholar] [CrossRef]
- Gazis, D.C.; Herman, R.; Potts, R.B. Car-following theory of steady-state traffic flow using time-to-collision. Oper. Res. 1959, 7, 499–505. [Google Scholar] [CrossRef]
- Koutsopoulos, H.N.; Farah, H. Latent class model for car following behavior. Transp. Res. Part B 2012, 46, 563–578. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested Traffic States in Empirical Observations and Microscopic Simulations. Phys. Rev. E 2000, 62, 1805–1824. [Google Scholar] [CrossRef]
- Malinauskas, R.M. The Intelligent Driver Model: Analysis and application to Adaptive Cruise Control. Ph.D. Thesis, Clemson University, Clemson, SC, USA, 2014. [Google Scholar]
- Xiong, Z.; Li, M.; Ma, Y.; Wu, X. Vehicle Re-Identification With Image Processing and Car-Following Model Using Multiple Surveillance Cameras From Urban Arterials. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7619–7630. [Google Scholar] [CrossRef]
- Raju, N.; Arkatkar, S.; Joshi, G. Evaluating performance of selected vehicle following models using trajectory data under mixed traffic conditions. J. Intell. Transp. Syst. 2020, 24, 617–634. [Google Scholar] [CrossRef]
- Beheshtitabar, E.; Alipour, E.M. A Rule Based Control Algorithm for on-Ramp Merge With Connected and Automated Vehicles. In Proceedings of the International Conference on Transportation and Development, Seattle, WA, USA, 26–29 May 2020; American Society of Civil Engineers: Reston, VA, USA, 2020. [Google Scholar]
- Salles, D.; Kaufmann, S.; Reuss, H. Extending the Intelligent Driver Model in SUMO and Verifying the Drive Off Trajectories with Aerial Measurements. SUMO User Conference 2020. Available online: https://sumo.dlr.de/2020/SUMO2020_paper_28.pdf (accessed on 30 September 2022).
- Krau, S. Microscopic Modeling of Traffic Flow: Investigation of Collision Free Vehicle Dynamics. 1998. Available online: https://www.osti.gov/etdeweb/biblio/627062 (accessed on 30 September 2022).
- Asaithambi, G.; Kanagaraj, V.; Srinivasan, K.K.; Sivanandan, R. Study of traffic flow characteristics using different vehicle-following models under mixed traffic conditions. Transp. Lett. 2016, 10, 92–103. [Google Scholar] [CrossRef]
- MLanger, A.; Harth, M.; Preitschaft, L.; Kates, R.; Bogenberger, K. Calibration and Assessment of Urban Microscopic Traffic Simulation As An Environment for Testing of Automated Driving. In Proceedings of the 2021 Ieee International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021. [Google Scholar]
- Tan, F.; Wei, D.; Zhu, J.; Xu, D.; Yin, K. An aggressive car-following model in the view of driving style. Can. J. Civ. Eng. 2017, 44, 775–782. [Google Scholar] [CrossRef]
- Chang, G.L.; Kao, Y.M. An empirical investigation of macroscopic lane-changing characteristics on uncongested multilane freeways. Transp. Res. Part Gen. 1991, 25, 375–389. [Google Scholar] [CrossRef]
- Toledo, T.; Koutsopoulos, H.N.; Ben-Akiva, M.E. Modeling Integrated Lane-Changing Behavior. Transp. Res. Rec. 2003, 1857, 30–38. [Google Scholar] [CrossRef]
- Krajzewicz, D. Traffic Simulation with SUMO—Simulation of Urban Mobility. In Fundamentals of Traffic Simulation; Springer: New York, NY, USA, 2011. [Google Scholar]
- Erdmann, J. SUMO’s Lane-Changing Model; Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Wei, D.; Liu, H. Analysis of asymmetric driving behavior using a self-learning approach. Transp. Res. Part Methodol. 2013, 47, 1–14. [Google Scholar] [CrossRef]
- Xie, D.F.; Fang, Z.Z.; Jia, B.; He, Z. A Data-driven Lane-changing Model based on Deep Learning. Transp. Res. Part Emerg. Technol. 2019, 106, 41–60. [Google Scholar] [CrossRef]
- Montanino, M.; Punzo, V. Making NGSIM Data Usable for Studies on Traffic Flow Theory: Multistep Method for Vehicle Trajectory Reconstruction. Transp. Res. Rec. J. Transp. Res. Board 2013, 2390, 99–111. [Google Scholar] [CrossRef]
- Sutton, R.; Barto, A. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Luong, N.C.; Hoang, D.T.; Gong, S.; Niyato, D.; Wang, P.; Liang, Y.C.; Kim, D.I. Applications of Deep Reinforcement Learning in Communications and Networking: A Survey. IEEE Commun. Surv. Tutorials 2019, 21, 3133–3174. [Google Scholar] [CrossRef]
- Terry, J.; Black, B.; Grammel, N.; Jayakumar, M.; Hari, A.; Sullivan, R.; Santos, L.S.; Dieffendahl, C.; Horsch, C.; Perez-Vicente, R.; et al. PettingZoo: Gym for Multi-Agent Reinforcement Learning. Adv. Neural Inf. Process. Syst. 2020, 34, 15032–15043. [Google Scholar]
- Feng, S.; Feng, Y.; Sun, H.; Zhang, Y.; Liu, H.X. Testing Scenario Library Generation for Connected and Automated Vehicles: An Adaptive Framework. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1213–1222. [Google Scholar] [CrossRef]
- Feng, S.; Feng, Y.; Yu, C.; Zhang, Y.; Liu, H.X. Testing Scenario Library Generation for Connected and Automated Vehicles, Part I: Methodology. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1573–1582. [Google Scholar] [CrossRef]
- Feng, S.; Feng, Y.; Sun, H.; Bao, S.; Zhang, Y.; Liu, H.X. Testing Scenario Library Generation for Connected and Automated Vehicles, Part II: Case Studies. IEEE Trans. Intell. Transp. Syst. 2020, 2, 5635–5647. [Google Scholar] [CrossRef]
- Tsitsiklis, P. The complexity of markov decision processes. Math. Oper. Res. 1987, 12, 441–450. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Full Name |
|---|---|
| P2X | Vulnerable Road User Safe Passing |
| V2I | Hazardous Location Warning |
| V2I | Speed Limit Warning |
| V2I | Red Light Violation Warning |
| V2I | Green Light Optimal Speed Advisory |
| V2I | In-Vehicle Signage |
| V2I | Traffic Jam Warning |
| V2I | Vehicle Near-Field Payment |
| V2I | Cooperative Vehicle Merge |
| V2I | Cooperative Intersection Passing |
| V2I | Differential Data Service |
| V2I | Dynamic Lane Management |
| V2I | Cooperative High Priority Vehicle Passing |
| V2I | Guidance Service in Parking Area |
| V2I | Probe Data Collection |
| V2I | Road Tolling Service |
| V2P/V2I | Vulnerable Road User Collision Warning |
| V2V | Forward Collision Warning |
| V2V | Blind Spot Warning-Lane Change Warning |
| V2V | Do Not Pass Warning |
| V2V | Emergency Vehicle Warning |
| V2V | Cooperative Platooning Management |
| V2V/V2I | Intersection Collision Warning |
| V2V/V2I | Left Turn Assist |
| V2V/V2I | Sensor Data Sharing |
| V2V/V2I | Cooperative Lane Change |
| V2V-Event | Emergency Brake Warning |
| V2V-Event | Abnormal Vehicle Warning |
| V2V-Event | Control Loss Warning |
| Simulators | OpenDRIVE | OpenSCENARIO |
|---|---|---|
| CARLA | yes | yes |
| CarMaker | yes | Yes |
| CarSim | yes | No |
| MATLAB | yes | No |
| PanoSim | yes | Yes |
| PreScan | yes | Yes |
| PTV Vissim | yes | No |
| SUMO | yes | No |
| VIRES VTD | yes | Yes |
| Parameters | Notation | Value |
|---|---|---|
| Maximum acceleration | 2 m/s | |
| Comfortable deceleration | 3 m/s | |
| Expected speed of HV | 60 km/h | |
| T | Desired safety time headway | 1 s |
| Acceleration factor | 2 | |
| Minimum safe gap | 1 m | |
| g | Gap between HV and RV | - |
| Speed of HV | - | |
| Speed of RV | - |
| Methods | Efficiency | Coverage | Accuracy | Real-Time |
|---|---|---|---|---|
| Actual field collection | Moderate | Moderate | good | good |
| Remote sensing imagery | good | good | Moderate | Moderate |
| OpenStreetMap files | good | good | good | Moderate |
| Methods | Ease of Use | Conform to Driving Rules | Percentage of Key Scenarios | Quality |
|---|---|---|---|---|
| Combinatorial testing | good | Moderate | Moderate | Moderate |
| Knowledge-based generation | Moderate | Moderate | Good | Moderate |
| Driving behavior based generation | Moderate | good | Moderate | good |
| Data-driven generation | Moderate | good | good | good |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Wang, J.; Meng, F.; Liu, T. Review on Functional Testing Scenario Library Generation for Connected and Automated Vehicles. Sensors 2022, 22, 7735. https://doi.org/10.3390/s22207735
Zhu Y, Wang J, Meng F, Liu T. Review on Functional Testing Scenario Library Generation for Connected and Automated Vehicles. Sensors. 2022; 22(20):7735. https://doi.org/10.3390/s22207735
Chicago/Turabian StyleZhu, Yu, Jian Wang, Fanqiang Meng, and Tongtao Liu. 2022. "Review on Functional Testing Scenario Library Generation for Connected and Automated Vehicles" Sensors 22, no. 20: 7735. https://doi.org/10.3390/s22207735
APA StyleZhu, Y., Wang, J., Meng, F., & Liu, T. (2022). Review on Functional Testing Scenario Library Generation for Connected and Automated Vehicles. Sensors, 22(20), 7735. https://doi.org/10.3390/s22207735