
Collaborative Damage Detection Framework for Rail Structures Based on a Multi-Agent System Embedded with Soft Multi-Functional Sensors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
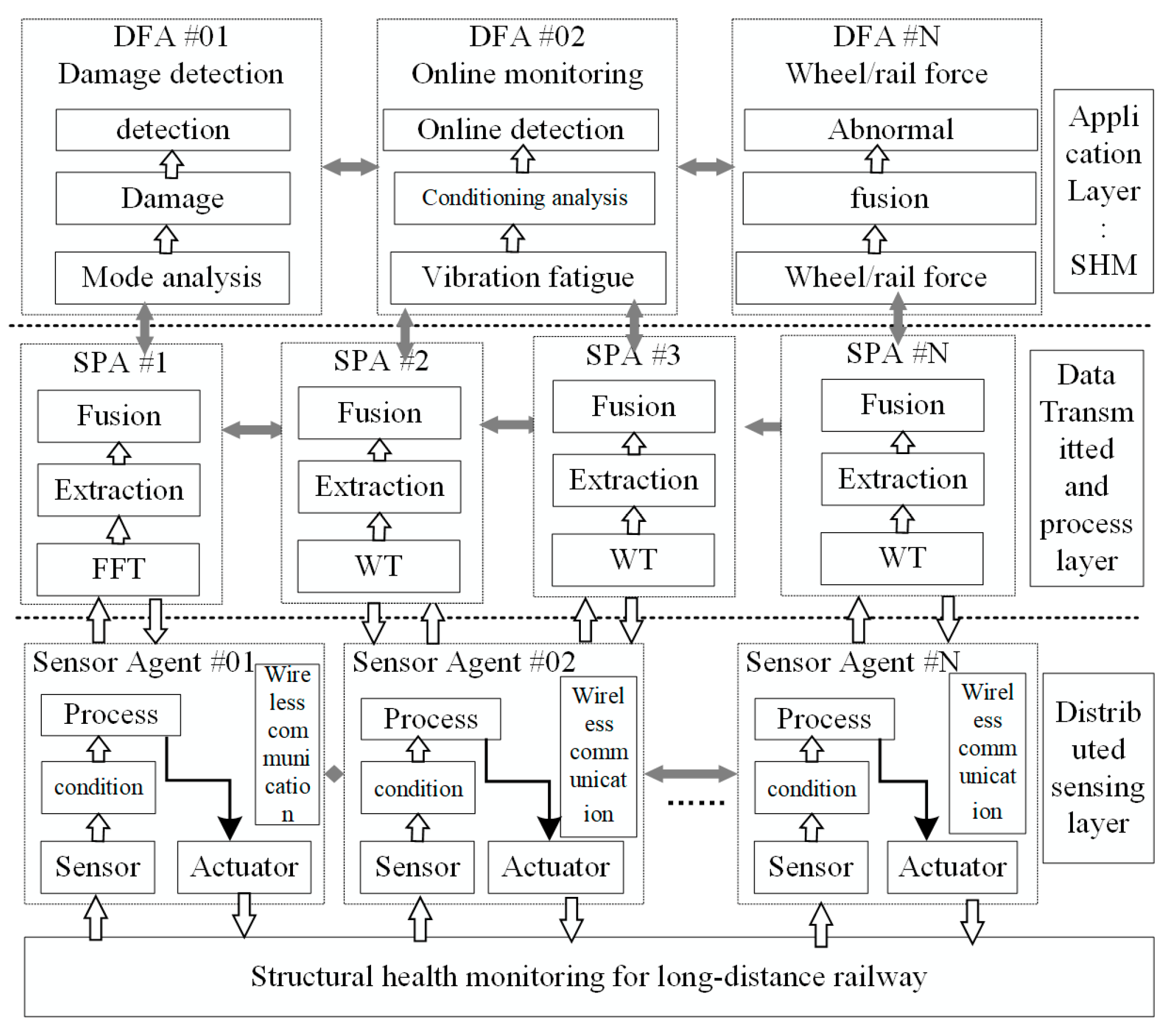
- A multi-agent framework based on a WSN is adopted for collaborative structural health monitoring of the track with three layers: a distributed sensor data acquisition layer, sensor data processing layer, and application layer.
- (2)
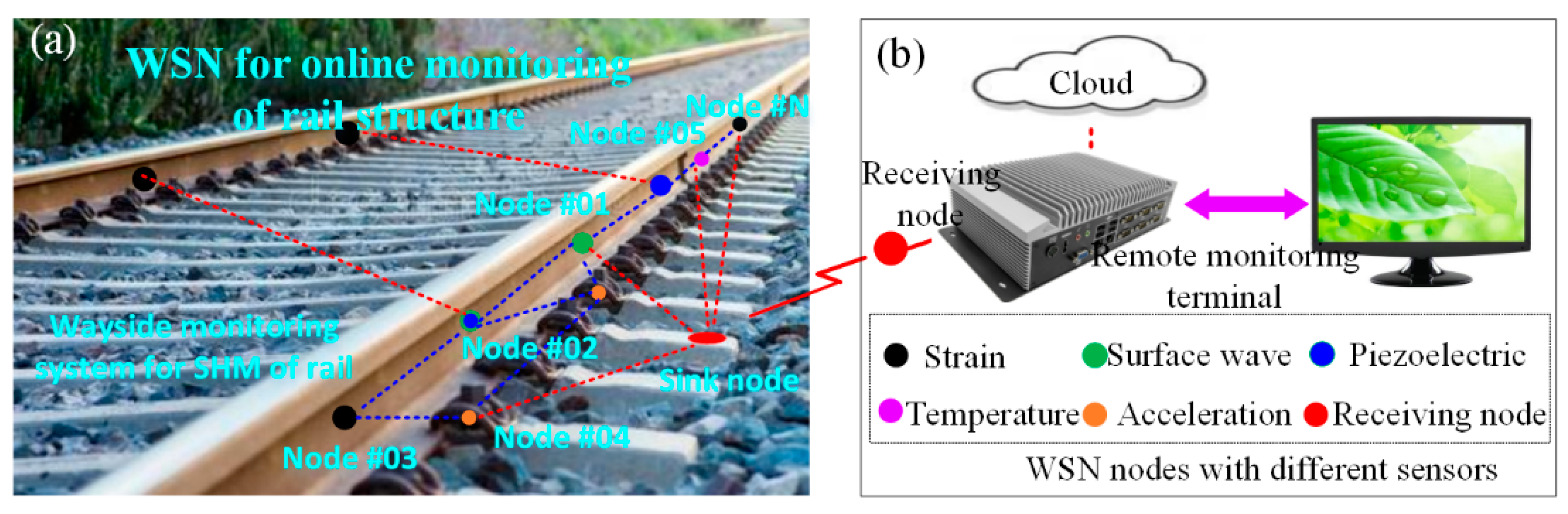
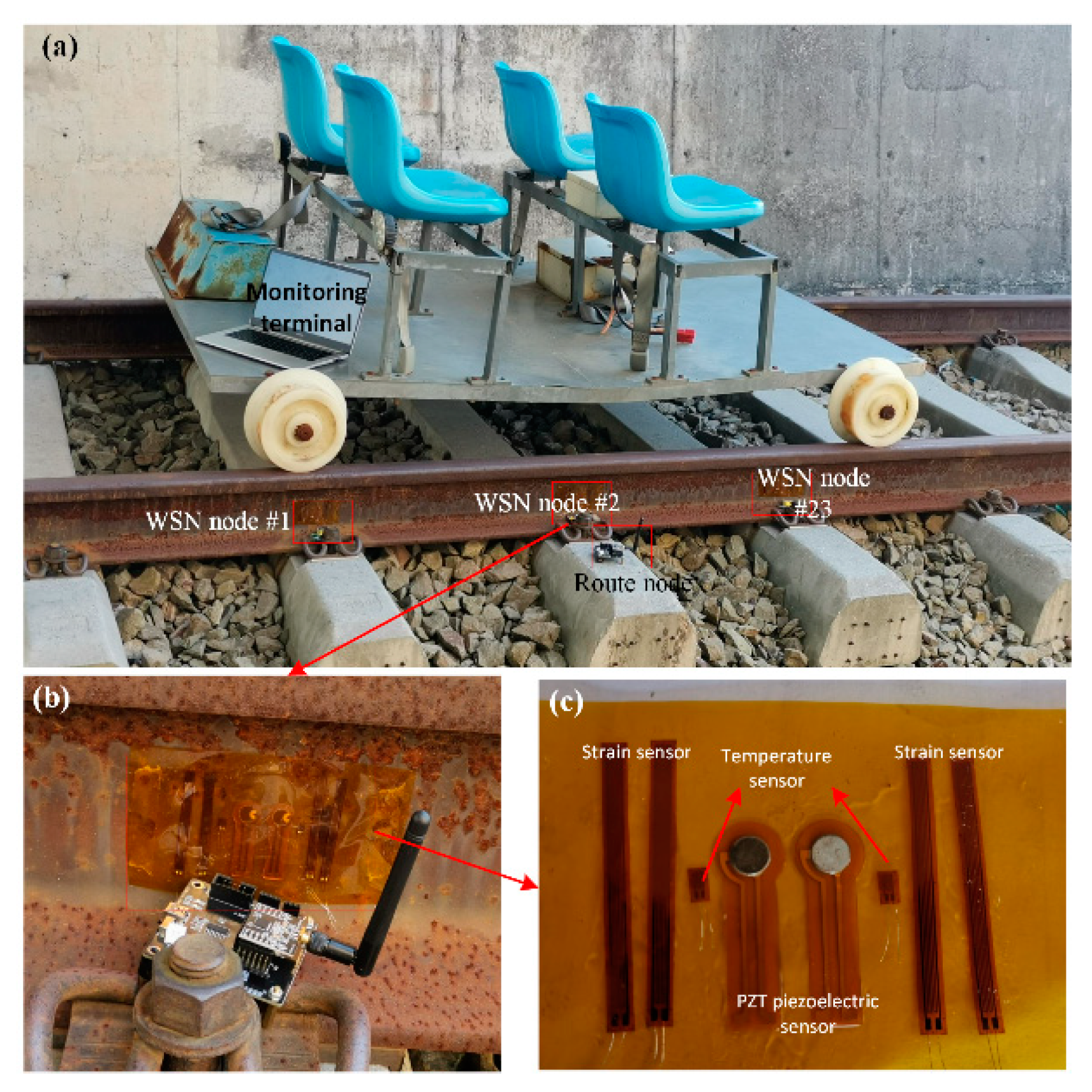
- WSN nodes with SMFS are successfully assembled onto a 100-m-long track for structural health monitoring and crack detection of the track. Based on the sensor data from the SA and feature data from SPA, neural network DFAs are applied to fuse the feature data for the crack detection of rail surfaces.
2. Online Monitoring Framework of Rail Structure
2.1. Problem Formulation
2.2. Collaborative Monitoring Framework for Rail Damage
- (1)
- Data sensing layer
- (2)
- Data transmission and processing layer
- (3)
- Damage identification layer
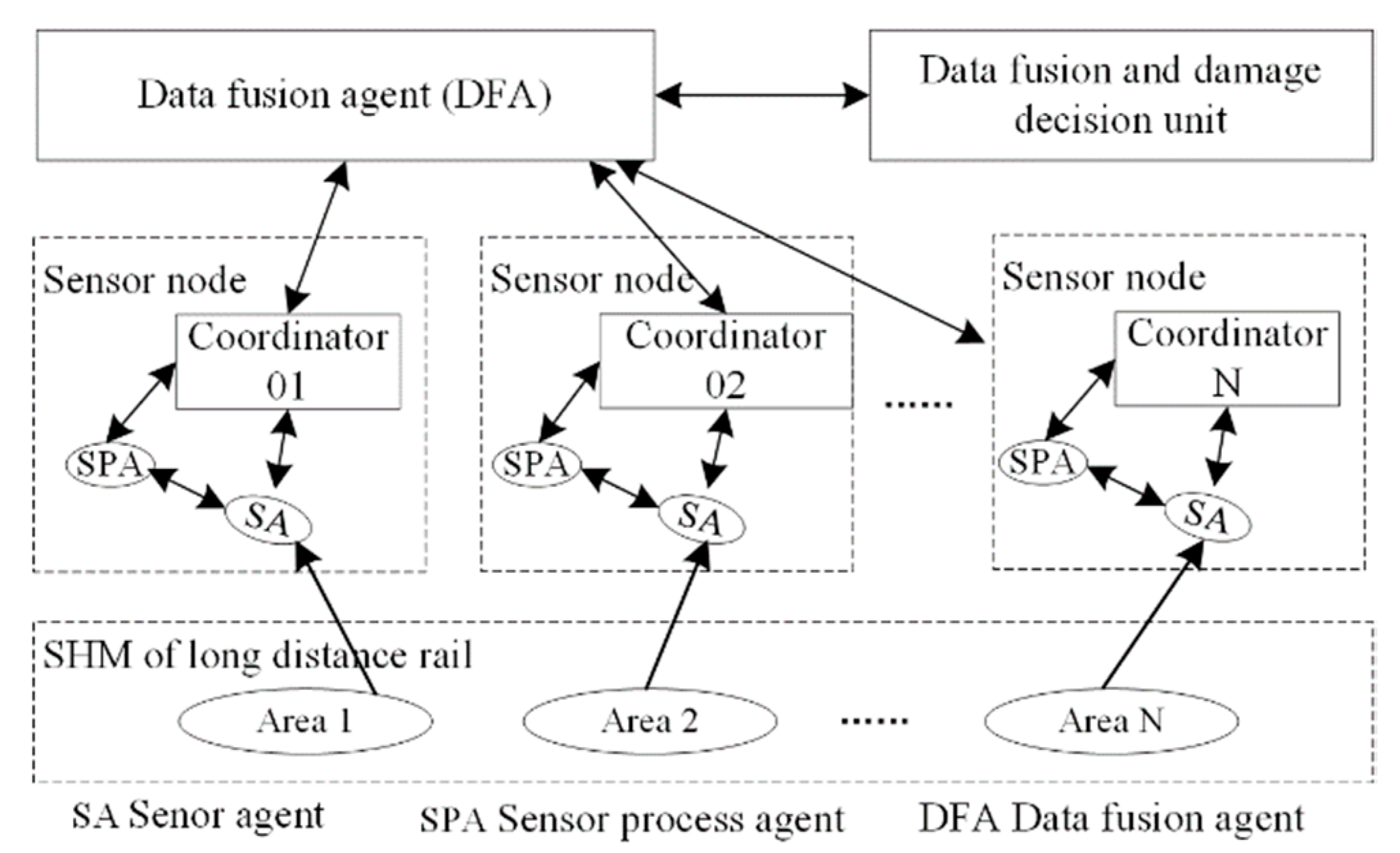
2.3. Principle of Agents
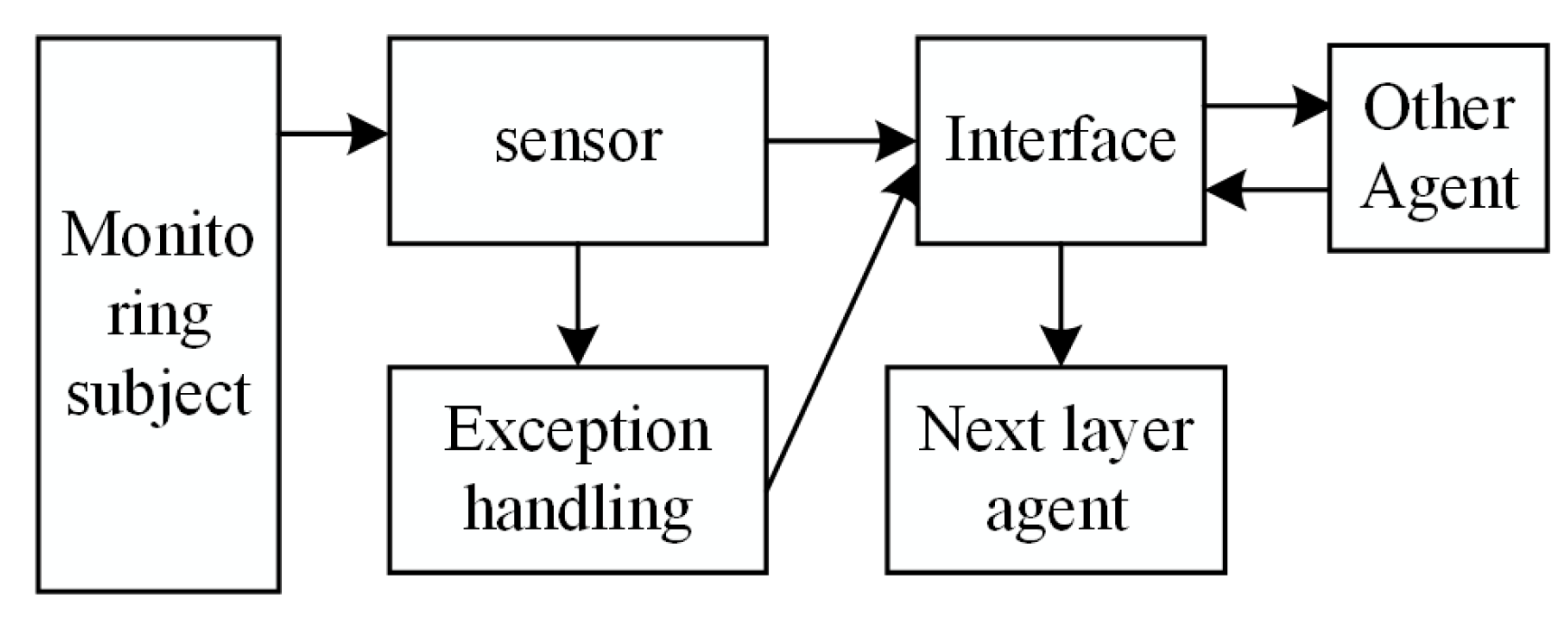
2.3.1. Sensor Agent
2.3.2. Sensor Processing Agent (SPA)
2.3.3. Data Fusion Agent (DFA)
3. Distributed Data Collection and Collaboration Process
3.1. Distributed Data Collection
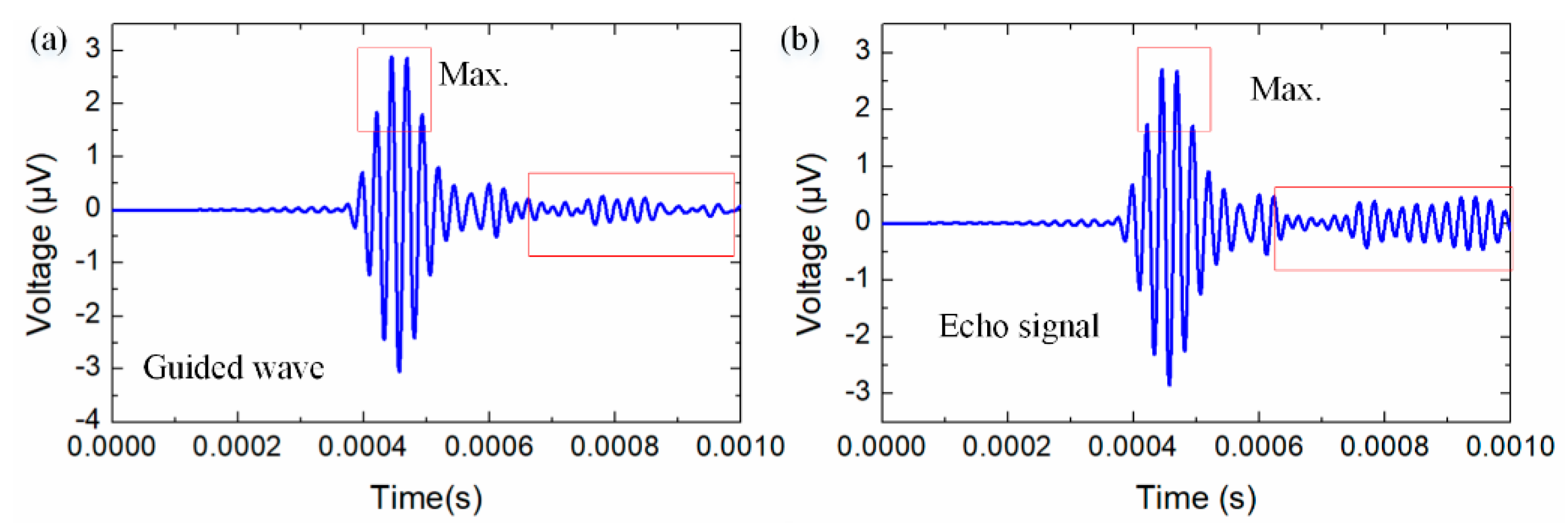
3.1.1. Active Damage Detection Based on Lamb Wave
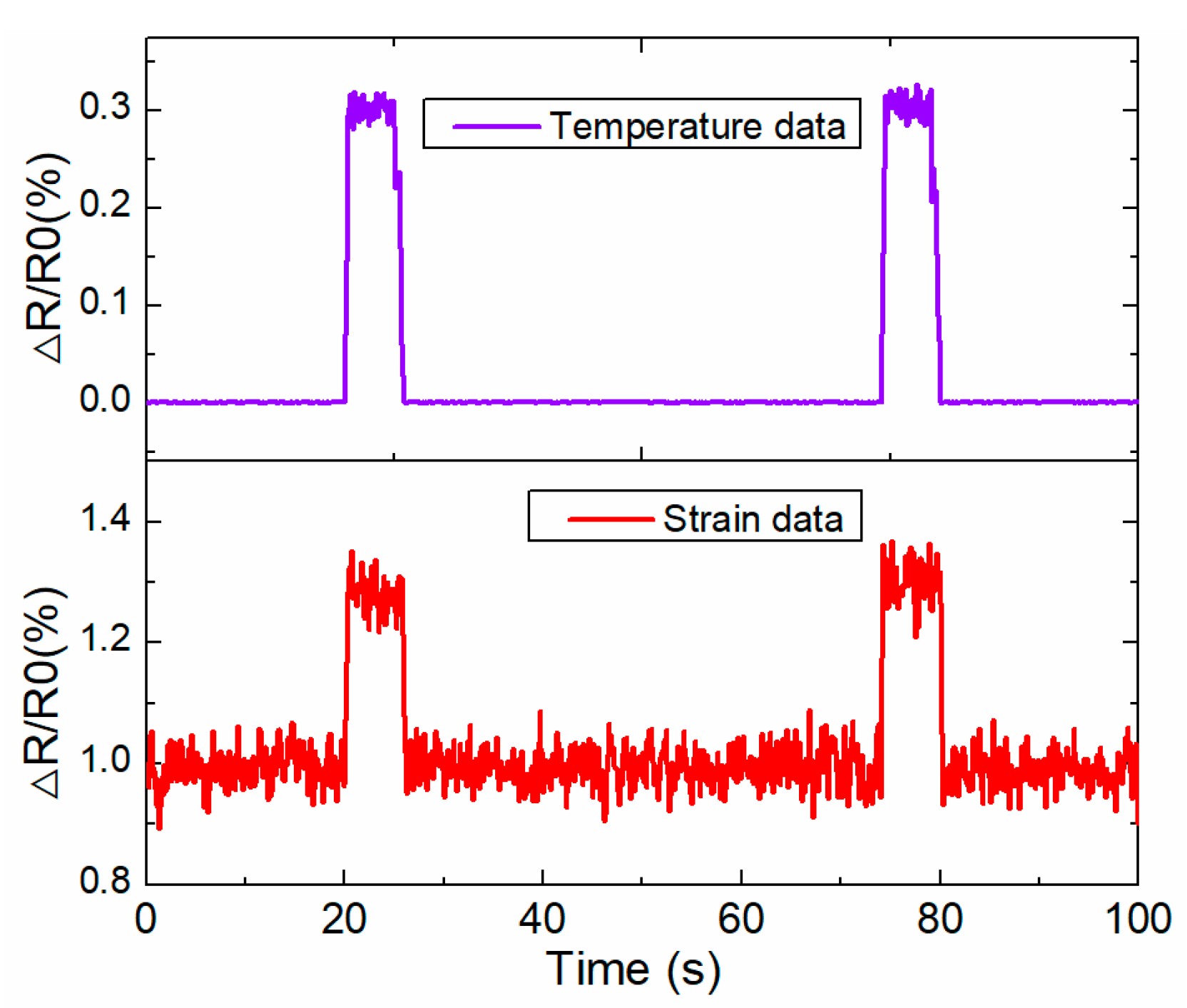
3.1.2. Strain Sensor
3.1.3. Temperature Sensors
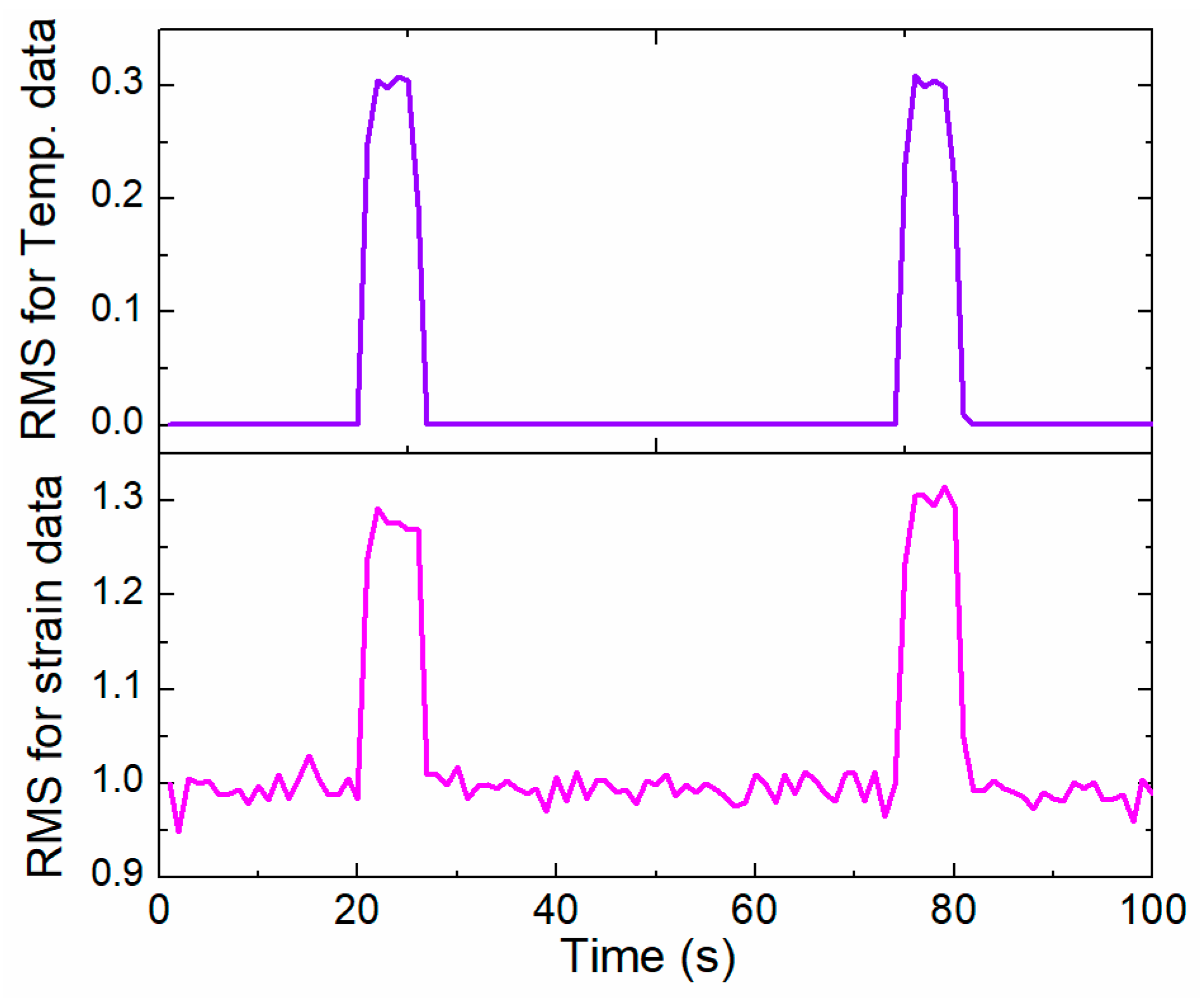
3.2. Feature Extraction
3.2.1. Echo Signal from Lamb Wave
3.2.2. Strain and Temperature Sensor Data
3.3. Feature Fusion
4. Experiment for Track Damage Recognition
4.1. Experimental Setup
4.2. Online Structural Health Monitoring of Rail Structures
5. Discussion and Conclusions
- (1)
- A multi-agent framework was built for the structural health monitoring of a rail structure based on a WSN with three layers: the sensor data acquisition layer, sensor data processing layer, and application layer. The distributed data sensing method was used to collect the sensing data from the different blocks in the long-distance rail structure by the SAs, and feature data at different levels were extracted by the SPA for online monitoring of the rail structure.
- (2)
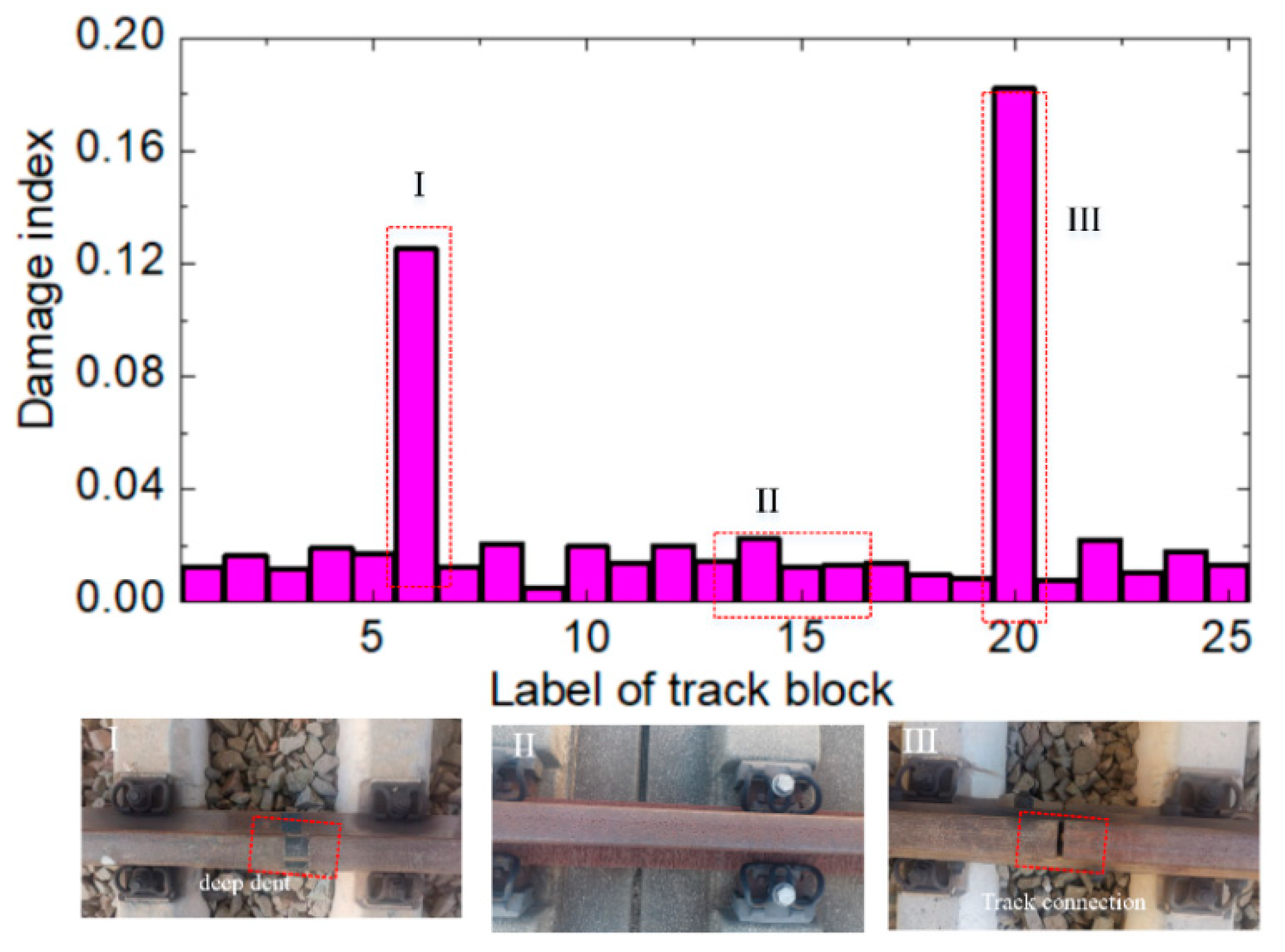
- The experiments verified that the WSN with SMFS was successfully assembled onto the 100-m-long track for crack detection of the rail surface. Based on the sensing data from the SA and feature data from the SPA, the DFAs were designed to calculate the damage index (DI) of the track with the multi-sensing data through an intelligent fusion algorithm for damage recognition.
- (1)
- WSN nodes with more functionality should be developed for the structural health monitoring of tracks. A flexible hybrid electronic technology could be adopted for WSN nodes to improve the integration ability of sensing devices with good electrical and communication performances;
- (2)
- Field tests for rail monitoring could be implemented using WSNs with soft sensors. This would be useful to improve the electrical performance of WSNs with soft sensors during long-term structural health monitoring in complicated environments due to the high-speed wheel–rail rolling interactions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jing, L.; Wang, K.; Zhai, W. Impact vibration behavior of railway vehicles:a state-of-the-art overview. Acta Mech. Sin. 2021, 37, 30. [Google Scholar] [CrossRef]
- Liu, G.; Li, P.; Wang, P.; Liu, J.; Wei, X. Study on structural health monitoring of vertical vibration of ballasted track in high-speed railway. J. Civ. Struct. Health Monit. 2021, 11, 451–463. [Google Scholar] [CrossRef]
- Gj, A.; Ms, A.; Jre, B.; Msd, B.; Nah, C. Smart railway sleepers-a review of recent developments, challenges, and future prospects-ScienceDirect. Constr. Build. Mater. 2020, 271, 121533. [Google Scholar]
- Lai, J.; Xu, J.; Liao, T.; Zheng, Z.; Chen, R.; Wang, P. Investigation on train dynamic derailment in railway turnouts caused by track failure. Eng. Fail. Analysis. 2022, 134, 106050. [Google Scholar] [CrossRef]
- Skrypnyk, R.; Ossberger, U.; Plsson, B.A.; Ekh, M.; Nielsen, J. Long-term rail profile damage in a railway crossing: Field measurements and numerical simulations. Wear 2020, 472–473, 203331. [Google Scholar] [CrossRef]
- Wang, G.; Liu, Y.; Xiang, J. A two-stage algorithm of railway sleeper crack detection based on edge detection and CNN. In Proceedings of the 2020 Asia-Pacific International Symposium on Advanced Reliability and Maintenance Modeling (APARM), Vancouver, BC, Canada, 20–23 August 2020. [Google Scholar]
- Fhkie, L.K.M.C.M.; Ceng, S.L.M.M. Unconventional Method of Train Detection Using Fibre Optic Sensors. Hkie Trans. 2006, 13, 16–21. [Google Scholar]
- Li, Y.; Liu, J.; Wang, Y. Railway Wheel Flat Detection Based on Improved Empirical Mode Decomposition. Shock Vib. 2016, 2016, 1–14. [Google Scholar] [CrossRef]
- Opala, M. Analysis of Safety Requirements for Securing the Semi-Trailer Truck on the Intermodal Railway Wagon. Energies 2021, 14, 6539. [Google Scholar] [CrossRef]
- Nobrega, R.A. Detection and Classification System for Rail Surface Defects Based on Eddy Current. Sensors 2021, 21, 7937. [Google Scholar]
- Wang, K.; Hao, Q.; Zhang, X.; Tang, Z.; Shen, Y. Blind source extraction of acoustic emission signals for rail cracks based on ensemble empirical mode decomposition and constrained independent component analysis. Measurement 2020, 157, 107653. [Google Scholar] [CrossRef]
- Wang, J.; He, Q.; Kong, F. A new synthetic detection technique for trackside acoustic identification of railroad roller bearing defects. Appl. Acoust. 2014, 85, 69–81. [Google Scholar] [CrossRef]
- Petcher, P.A.; Potter, M.D.G.; Dixon, S. A new electromagnetic acoustic transducer (EMAT) design for operation on rail. NDT E Int. 2014, 65, 1–7. [Google Scholar] [CrossRef]
- Wu, J.; Yuan, S.; Ji, S.; Zhou, G.; Wang, Y.; Wang, Z. Multi-agent system design and evaluation for collaborative wireless sensor network in large structure health monitoring. Expert Syst. Appl. 2010, 37, 2028–2036. [Google Scholar] [CrossRef]
- Song, Y.; Sun, B. Recognition of Wheel Polygon Based on W/R Force Measurement by Piezoelectric Sensors in GSM-R Network. Wirel. Pers. Commun. 2018, 102, 1283–1291. [Google Scholar] [CrossRef]
- Wang, L.D.; Yue, G.D.; Xu, Z.; Liu, C.; Wang, T.R. Architecture and performance test of wireless sensor network system for distributed stress monitoring in high-speed railway track. J. Jilin Univ. 2015, 45, 1974–1979. [Google Scholar]
- Ye, Y.; Huang, P.; Zhang, Y. Deep learning-based fault diagnostic network of high-speed train secondary suspension systems for immunity to track irregularities and wheel wear. Railw. Eng. Sci. 2021, 30, 96–116. [Google Scholar] [CrossRef]
- Sierra-Pérez, J.; Torres-Arredondo, M.A.; Alvarez-Montoya, J. Damage detection methodology under variable load conditions based on strain field pattern recognition using FBGs, nonlinear principal component analysis, and clustering techniques. Smart Mater. Struct. 2017, 27, 015002. [Google Scholar] [CrossRef]
- Yi, X.; Zhu, D.; Wang, Y.; Guo, J.; Lee, K.M. Embedded transmissibility function analysis for damage detection in a mobile sensor network. Proc. SPIE-Int. Soc. Opt. Eng. 2010, 7647, 764729. [Google Scholar]
- Kang, S.H.; Kang, M.; Kang, L.H. Defect detection on the curved surface of a wind turbine blade using piezoelectric flexible line sensors. Struct. Health Monit. 2022, 21, 1207–1217. [Google Scholar] [CrossRef]
- Sen, M.K.; Dutta, S.; Kabir, G. Evaluation of interaction between housing infrastructure resilience factors against flood hazard based on rough DEMATEL approach. Int. J. Disaster Resil. Built Environ. 2021, 12, 555–575. [Google Scholar] [CrossRef]
- Liu, H.; Peng, J.; Gao, D.; Yang, Y.; Zhang, X. A Hybrid Data-Fusion Estimate Method for Health Status of Train Braking System. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020. [Google Scholar]
- Cheng, X.; Bao, C.; Wang, X.; Dong, W. Stretchable strain sensor based on conductive polymer for structural health monitoring of high-speed train head. Proc. Inst. Mech. Eng. Part. L J. Mater. Des. Appl. 2020, 234, 496–503. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, X.; Yao, D.; Yang, L.; Dong, W. Collaborative Damage Detection Framework for Rail Structures Based on a Multi-Agent System Embedded with Soft Multi-Functional Sensors. Sensors 2022, 22, 7795. https://doi.org/10.3390/s22207795
Cheng X, Yao D, Yang L, Dong W. Collaborative Damage Detection Framework for Rail Structures Based on a Multi-Agent System Embedded with Soft Multi-Functional Sensors. Sensors. 2022; 22(20):7795. https://doi.org/10.3390/s22207795
Chicago/Turabian StyleCheng, Xiao, Daojin Yao, Lin Yang, and Wentao Dong. 2022. "Collaborative Damage Detection Framework for Rail Structures Based on a Multi-Agent System Embedded with Soft Multi-Functional Sensors" Sensors 22, no. 20: 7795. https://doi.org/10.3390/s22207795