An Experimental Ultrasound System for Qualitative Tomographic Imaging

 , , , and
, , , and
Abstract
:1. Introduction
- The need for a large number of US sensors in order to obtain a proper resolution, which must be low cost and have very similar characteristics (in terms of operating frequency band and radiation pattern). Furthermore, the size of the sensors is paramount, since smaller sensors are desirable for the radiation pattern, but they result in low pressure levels, which results in a low signal-to-noise ratio.
- The acquisition time must be very short to avoid movement artifacts and to allow sub-millimeter resolutions.
- Due to the attenuation, the received signal at the transducer’s location can be very low with respect to the transmitted one, which generates large dynamic ranges (this aspect is quite limiting, especially for diagnostic purposes in the biomedical field).
- Proper processing based on coherent imaging is paramount to obtain high signal-to-noise and signal-to-artifact ratios at good resolutions. Nevertheless, this has a strong impact in the accuracy of evaluating the transducer’s position, which must be known with an uncertainty lower than millimeter fractions at a few MHz frequency. Thus, the precise calibration of sensors position is compulsory.
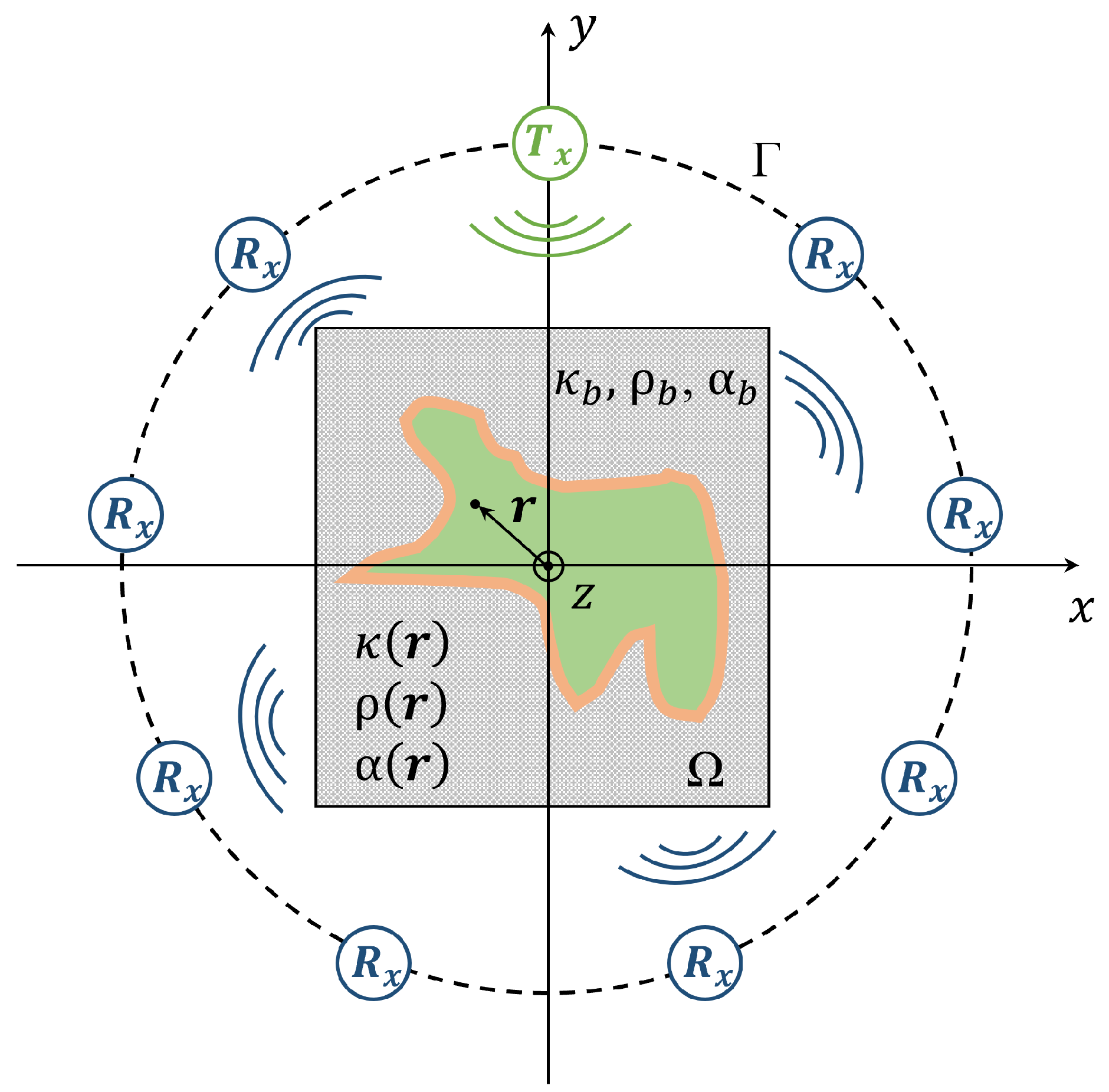
2. Mathematical Formulation
3. System Overview
4. Numerical and Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CT | Computed Tomography; |
| SPECT | Single Photon Emission Computed Tomography; |
| PET | Positron Emission Tomography; |
| MRI | Magnetic Resonance Imaging; |
| US | Ultrasound; |
| UST | Ultrasound Tomography; |
| ROI | Region of Interest; |
| ISP | Inverse Scattering Problem; |
| BA | Born Approximation; |
| TSVD | Truncated Singular Value Decomposition. |
References
- Smith, N.; Webb, A. Introduction to Medical Imaging: Physics, Engineering and Clinical Applications; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Sanches, J.; Laine, A.; Suri, J. Ultrasound Imaging; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Joel, T.; Sivakumar, R. Despeckling of ultrasound medical images: A survey. J. Image Graph. 2013, 1, 161–165. [Google Scholar] [CrossRef] [Green Version]
- Ambrosanio, M.; Baselice, F.; Ferraioli, G.; Pascazio, V. Ultrasound despeckling based on non local means. In EMBEC & NBC 2017; Springer: Singapore, 2017; pp. 109–112. [Google Scholar]
- Ambrosanio, M.; Baselice, F.; Ferraioli, G.; Pascazio, V.; Schirinzi, G. Enhanced Wiener filter for ultrasound image restoration. Comput. Methods Programs Biomed. 2018, 153, 71–81. [Google Scholar]
- Goncharsky, A.; Romanov, S.; Seryozhnikov, S. Low-frequency ultrasonic tomography: Mathematical methods and experimental results. Mosc. Univ. Phys. Bull. 2019, 74, 43–51. [Google Scholar] [CrossRef]
- Gemmeke, H.; Ruiter, N. 3D ultrasound computer tomography for medical imaging. NUclear Instruments Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2007, 580, 1057–1065. [Google Scholar] [CrossRef]
- Hagness, S.; Taflove, A.; Bridges, J. Two-dimensional FDTD analysis of a pulsed microwave confocal system for breast cancer detection: Fixed-focus and antenna-array sensors. IEEE Trans. Biomed. Eng. 1998, 45, 1470–1479. [Google Scholar] [CrossRef] [Green Version]
- Popovic, M.; Hagness, S.; Taflove, A.; Bridges, J. 2-D FDTD study of fixed-focus elliptical reflector system for breast cancer detection: Frequency window for optimum operation. IEEE Antennas Propag. Soc. Int. Symp. 1998, 4, 1992–1995. [Google Scholar]
- Fink, M. Time reversal of ultrasonic fields. I. Basic principles. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1992, 39, 555–566. [Google Scholar] [CrossRef]
- Dong, C.; Jin, Y.; Lu, E. Accelerated nonlinear multichannel ultrasonic tomographic imaging using target sparseness. IEEE Trans. Image Process. 2014, 23, 1379–1393. [Google Scholar] [CrossRef]
- Wiskin, J.; Malik, B.; Borup, D.; Pirshafiey, N.; Klock, J. Full wave 3D inverse scattering transmission ultrasound tomography in the presence of high contrast. Sci. Rep. 2020, 10, 20166. [Google Scholar] [CrossRef]
- Sandhu, G.; Li, C.; Roy, O.; Schmidt, S.; Duric, N. Frequency domain ultrasound waveform tomography: Breast imaging using a ring transducer. Phys. Med. Biol. 2015, 60, 538. [Google Scholar] [CrossRef] [Green Version]
- Mojabi, P.; LoVetri, J. Evaluation of balanced ultrasound breast imaging under three density profile assumptions. IEEE Trans. Comput. Imaging 2017, 3, 864–875. [Google Scholar] [CrossRef]
- Franceschini, S.; Ambrosanio, M.; Gifuni, A.; Grassini, G.; Baselice, F. An Experimental Ultrasound Database for Tomographic Imaging. Appl. Sci. 2022, 12, 5192. [Google Scholar] [CrossRef]
- Qin, Y.; Rodet, T.; Lambert, M.; Lesselier, D. Joint Inversion of Electromagnetic and Acoustic Data With Edge-Preserving Regularization for Breast Imaging. IEEE Trans. Comput. Imaging 2021, 7, 349–360. [Google Scholar] [CrossRef]
- Abdollahi, N.; Kurrant, D.; Mojabi, P.; Omer, M.; Fear, E.; LoVetri, J. Incorporation of ultrasonic prior information for improving quantitative microwave imaging of breast. IEEE J. Multiscale Multiphysics Comput. Tech. 2019, 4, 98–110. [Google Scholar] [CrossRef]
- Ambrosanio, M.; Franceschini, S.; Baselice, F.; Pascazio, V. Machine learning for microwave imaging. In Proceedings of the 2020 14th European Conference On Antennas And Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–4. [Google Scholar]
- Nguyen, M.; Bressmer, H.; Kugel, P.; Faust, U. Improvements in ultrasound transmission computed tomography. In Proceedings of the European Conference On Engineering And Medicine, Stuttgart, Germany, 25–28 April 1993. [Google Scholar]
- Ashfaq, M.; Ermert, H. A new approach towards ultrasonic transmission tomography with a standard ultrasound system. IEEE Ultrason. Symp. 2004, 3, 1848–1851. [Google Scholar]
- Krueger, M.; Pesavento, A.; Ermert, H. A modified time-of-flight tomography concept for ultrasonic breast imaging. In Proceedings of the 1996 IEEE Ultrasonics Symposium. Proceedings, San Antonio, TX, USA, 3–6 November 1996; Volume 2, pp. 1381–1385. [Google Scholar]
- Hadamard, J. Lectures on Cauchy’s Problem in Linear Partial Differential Equations; Courier Corporation: North Chelmsford, MA, USA, 2014. [Google Scholar]
- Colton, D.; Kress, R. Inverse Acoustic and Electromagnetic Scattering Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Bertero, M.; Boccacci, P. Introduction to Inverse Problems in Imaging; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Lavarello, R.; Hesford, A. Methods for forward and inverse scattering in ultrasound tomography. In Quantitative Ultrasound in Soft Tissues; Springer: Dordrecht, The Netherlands, 2013; pp. 345–394. [Google Scholar]
- Carson, P.; Oughton, T.; Hendee, W.; Ahuja, A. Imaging soft tissue through bone with ultrasound transmission tomography by reconstruction. Med. Phys. 1977, 4, 302–309. [Google Scholar] [CrossRef]
- Dines, K.; Fry, F.; Patrick, J.; Gilmor, R. Computerized ultrasound tomography of the human head: Experimental results. Ultrason. Imaging 1981, 3, 342–351. [Google Scholar] [CrossRef]
- Goss, S.; Johnston, R.; Dunn, F. Comprehensive compilation of empirical ultrasonic properties of mammalian tissues. J. Acoust. Soc. Am. 1978, 64, 423–457. [Google Scholar] [CrossRef] [Green Version]
- Goss, S.; Johnston, R.; Dunn, F. Compilation of empirical ultrasonic properties of mammalian tissues. II. J. Acoust. Soc. Am. 1980, 68, 93–108. [Google Scholar] [CrossRef] [Green Version]
- Bracewell, R.; Riddle, A. Inversion of fan-beam scans in radio astronomy. Astrophys. J. 1967, 150, 427. [Google Scholar] [CrossRef]
- Shepp, L.; Logan, B. The Fourier reconstruction of a head section. IEEE Trans. Nucl. Sci. 1974, 21, 21–43. [Google Scholar] [CrossRef]
- Andersen, A.; Kak, A. Simultaneous algebraic reconstruction technique (SART): A superior implementation of the ART algorithm. Ultrason. Imaging 1984, 6, 81–94. [Google Scholar] [CrossRef] [PubMed]
- Glover, G. Ultrasonic Fan Beam Scanner for Computerized Time-of-Flight Tomography. (Google Patents, 1978). U.S. Patent 4,075,883, 28 February 1978. [Google Scholar]
- Norton, S. Computing ray trajectories between two points: A solution to the ray-linking problem. JOSA A 1987, 4, 1919–1922. [Google Scholar] [CrossRef]
- Bold, G.; Birdsall, T. A top-down philosophy for accurate numerical ray tracing. J. Acoust. Soc. Am. 1986, 80, 656–660. [Google Scholar] [CrossRef]
- Song, L.; Zhang, S. Stabilizing the iterative solution to ultrasonic transmission tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1998, 45, 1117–1122. [Google Scholar] [CrossRef]
- Li, S.; Jackowski, M.; Dione, D.; Varslot, T.; Staib, L.; Mueller, K. Refraction corrected transmission ultrasound computed tomography for application in breast imaging. Med. Phys. 2010, 37, 2233–2246. [Google Scholar] [CrossRef] [Green Version]
- Mueller, R.; Kaveh, M.; Wade, G. Reconstructive tomography and applications to ultrasonics. Proc. IEEE 1979, 67, 567–587. [Google Scholar] [CrossRef]
- Mueller, R. Diffraction tomography I: The wave-equation. Ultrason. Imaging 1980, 2, 213–222. [Google Scholar] [CrossRef]
- Wolf, E. Three-dimensional structure determination of semi-transparent objects from holographic data. Opt. Commun. 1969, 1, 153–156. [Google Scholar] [CrossRef]
- Habashy, T.; Groom, R.; Spies, B. Beyond the Born and Rytov approximations: A nonlinear approach to electromagnetic scattering. J. Geophys. Res. Solid Earth 1993, 98, 1759–1775. [Google Scholar] [CrossRef]
- Kak, A.; Slaney, M. Principles of Computerized Tomographic Imaging; SIAM: Philadelphia, PA, USA, 2001. [Google Scholar]
- Bevacqua, M.; Di Meo, S.; Crocco, L.; Isernia, T.; Pasian, M. Millimeter-waves breast cancer imaging via inverse scattering techniques. IEEE J. Electromagn. Microwaves Med. Biol. 2021, 5, 246–253. [Google Scholar] [CrossRef]
- Iwata, K.; Nagata, R. Calculation of refractive index distribution from interferograms using the Born and Rytov’s approximation. Jpn. J. Appl. Phys. 1975, 14, 379. [Google Scholar] [CrossRef] [Green Version]
- Kenue, S.; Greenleaf, J. Limited angle multifrequency diffraction tomography. IEEE Trans. Sonics Ultrason. 1982, 29, 213–216. [Google Scholar] [CrossRef]
- Norton, S. Generation of separate density and compressibility images in tissue. Ultrason. Imaging 1983, 5, 240–252. [Google Scholar] [CrossRef]
- Soumekh, M. Band-limited interpolation from unevenly spaced sampled data. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 110–122. [Google Scholar] [CrossRef]
- Colton, D.; Haddar, H.; Monk, P. The linear sampling method for solving the electromagnetic inverse scattering problem. SIAM J. Sci. Comput. 2003, 24, 719–731. [Google Scholar] [CrossRef] [Green Version]
- Van Den Berg, P.; Kleinman, R. A contrast source inversion method. Inverse Probl. 1997, 13, 1607. [Google Scholar] [CrossRef]
- Wang, Y.; Chew, W. An iterative solution of the two-dimensional electromagnetic inverse scattering problem. Int. J. Imaging Syst. Technol. 1989, 1, 100–108. [Google Scholar] [CrossRef]
- Chew, W.; Wang, Y. Reconstruction of two-dimensional permittivity distribution using the distorted Born iterative method. IEEE Trans. Med. Imaging 1990, 9, 218–225. [Google Scholar] [CrossRef]
- Remis, R.; Berg, P. On the equivalence of the Newton-Kantorovich and distorted Born methods. Inverse Probl. 2000, 16, L1. [Google Scholar] [CrossRef]
- Estatico, C.; Fedeli, A.; Pastorino, M.R.; azzo, A.; Tavanti, E. Microwave imaging of 3D dielectric structures by means of a Newton-CG method in spaces. Int. J. Antennas Propag. 2019, 2019, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Kleinman, R.; Berg, P. A modified gradient method for two-dimensional problems in tomography. J. Comput. Appl. Math. 1992, 42, 17–35. [Google Scholar] [CrossRef] [Green Version]
- Harada, H.; Wall, D.; Takenaka, T.; Tanaka, M. Conjugate gradient method applied to inverse scattering problem. IEEE Trans. Antennas Propag. 1995, 43, 784–792. [Google Scholar] [CrossRef]
- Lobel, P.; Pichot, C.; Blanc-Féraud, L.; Barlaud, M. Microwave imaging: Reconstructions from experimental data using conjugate gradient and enhancement by edge-preserving regularization. Int. J. Imaging Syst. Technol. 1997, 8, 337–342. [Google Scholar] [CrossRef]
- Wiskin, J.; Borup, D.; Johnson, S.; Berggren, M. Non-linear inverse scattering: High resolution quantitative breast tissue tomography. J. Acoust. Soc. Am. 2012, 131, 3802–3813. [Google Scholar] [CrossRef] [Green Version]
- Bevacqua, M.; Isernia, T. Quantitative non-linear inverse scattering: A wealth of possibilities through smart rewritings of the basic equations. IEEE Open J. Antennas Propag. 2021, 2, 335–348. [Google Scholar] [CrossRef]
- Gordon, R. A tutorial on ART (algebraic reconstruction techniques). IEEE Trans. Nucl. Sci. 1974, 21, 78–93. [Google Scholar] [CrossRef]
- Waag, R.; Lin, F.; Varslot, T.; Astheimer, J. An eigenfunction method for reconstruction of large-scale and high-contrast objects. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2007, 54, 1316–1332. [Google Scholar] [CrossRef]
- Camacho, J.; Medina, L.; Cruza, J.; Moreno, J.; Fritsch, C. Multimodal ultrasonic imaging for breast cancer detection. Arch. Acoust. 2012, 37, 253–260. [Google Scholar] [CrossRef]
- Li, C.; Duric, N.; Huang, L. Comparison of ultrasound attenuation tomography methods for breast imaging. Med. Imaging 2008 Ultrason. Imaging Signal Process. 2008, 6920, 338–346. [Google Scholar]
- Duric, N.; Littrup, P.; Babkin, A.; Chambers, D.; Azevedo, S.; Kalinin, A.; Pevzner, R.; Tokarev, M.; Holsapple, E.; Rama, O.; et al. Development of ultrasound tomography for breast imaging: Technical assessment. Med. Phys. 2005, 32, 1375–1386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Greenleaf, J.; Ylitalo, J.; Gisvold, J. Ultrasonic computed tomography for breast examination. IEEE Eng. Med. Biol. Mag. 1987, 6, 27–32. [Google Scholar] [CrossRef] [PubMed]
- Mojabi, P.; LoVetri, J. Ultrasound tomography for simultaneous reconstruction of acoustic density, attenuation, and compressibility profiles. J. Acoust. Soc. Am. 2015, 134, 1813–1825. [Google Scholar] [CrossRef] [PubMed]
- O’Donnell, M.; Jaynes, E.; Miller, J. Kramers–Kronig relationship between ultrasonic attenuation and phase velocity. J. Acoust. Soc. Am. 1981, 69, 696–701. [Google Scholar] [CrossRef]
- Boashash, B. Estimating and interpreting the instantaneous frequency of a signal. I. Fundamentals. Proc. IEEE 1992, 80, 520–538. [Google Scholar] [CrossRef]
- Treeby, B.; Cox, B. k-Wave: MATLAB toolbox for the simulation and reconstruction of photoacoustic wave fields. J. Biomed. Opt. 2010, 15, 021314. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Time (single view) | 15 [ms] |
| Sample Time | 1 [ns] |
| Grid Resolution | 0.35 × 0.35 [mm2] |
| Number of Pixels | 984 × 984 |
| PML Size | 7 [mm] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ambrosanio, M.; Franceschini, S.; Autorino, M.M.; Baselice, F.; Pascazio, V. An Experimental Ultrasound System for Qualitative Tomographic Imaging. Sensors 2022, 22, 7802. https://doi.org/10.3390/s22207802
Ambrosanio M, Franceschini S, Autorino MM, Baselice F, Pascazio V. An Experimental Ultrasound System for Qualitative Tomographic Imaging. Sensors. 2022; 22(20):7802. https://doi.org/10.3390/s22207802
Chicago/Turabian StyleAmbrosanio, Michele, Stefano Franceschini, Maria Maddalena Autorino, Fabio Baselice, and Vito Pascazio. 2022. "An Experimental Ultrasound System for Qualitative Tomographic Imaging" Sensors 22, no. 20: 7802. https://doi.org/10.3390/s22207802