
Modelling and Control Design of a Non-Collaborative UAV Wireless Charging System

 ,
,  , and
, and
Abstract
:1. Introduction
2. Mathematical Analysis and Modelling of 3D WPT System
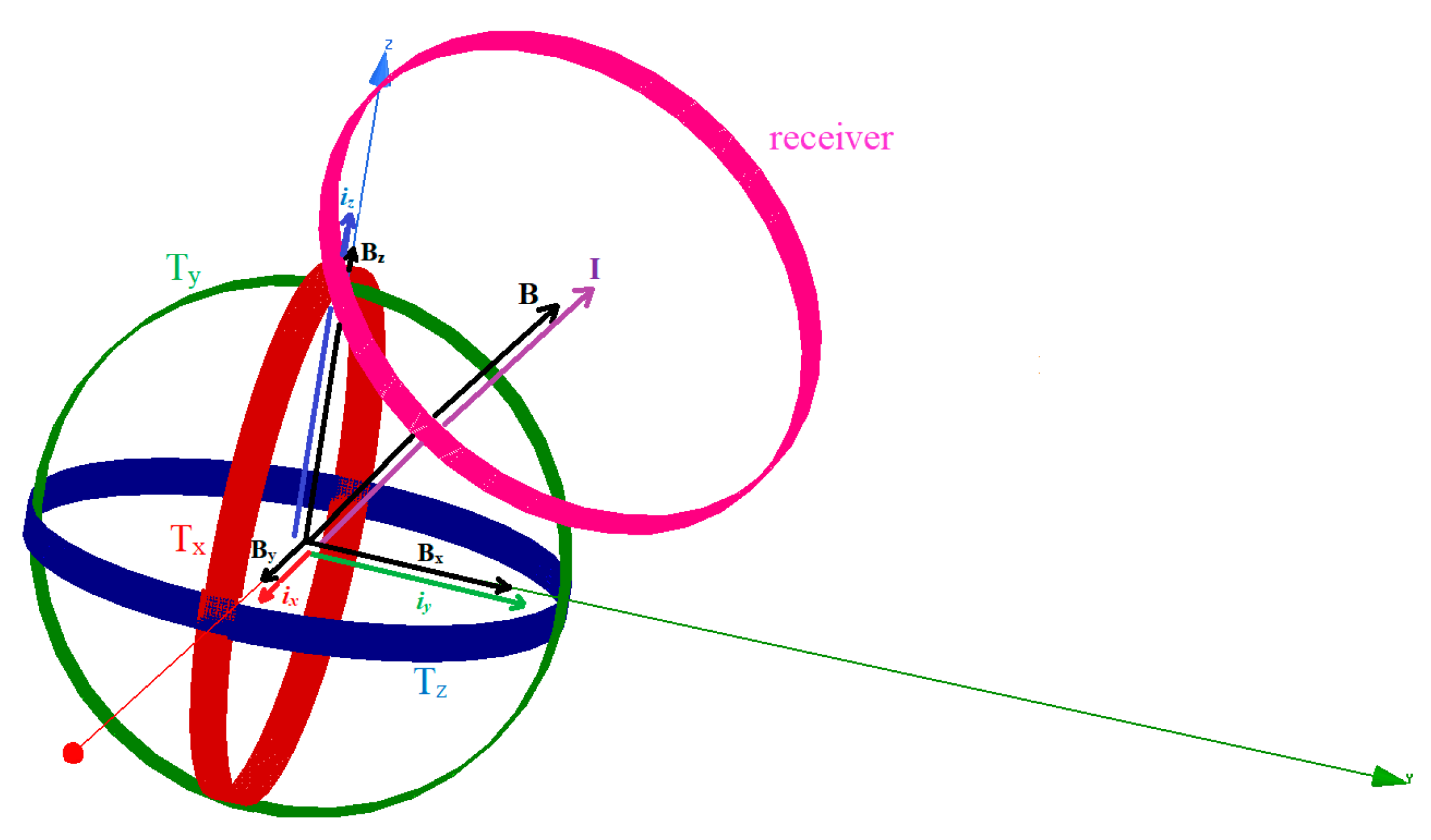
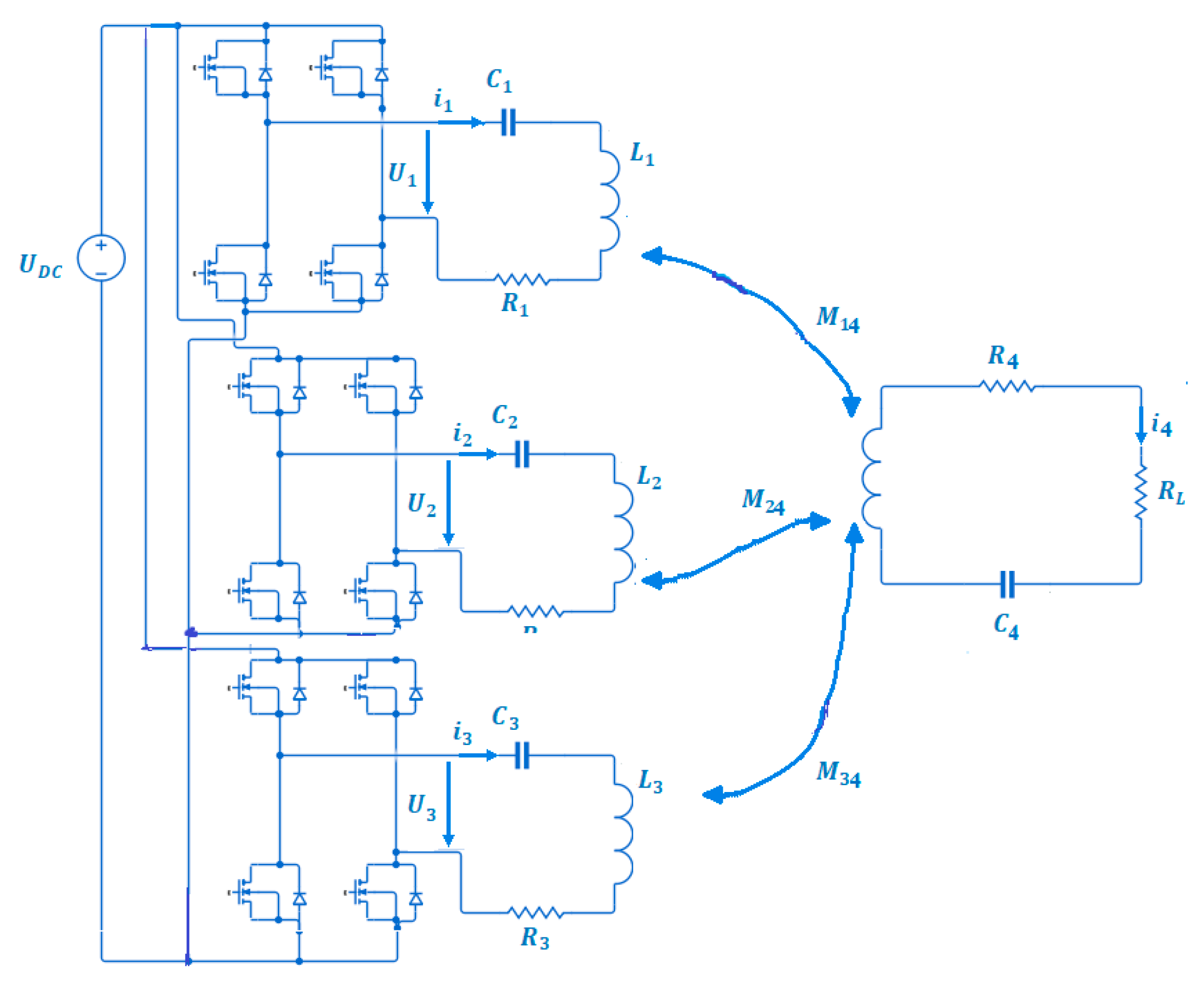
2.1. System Modelling
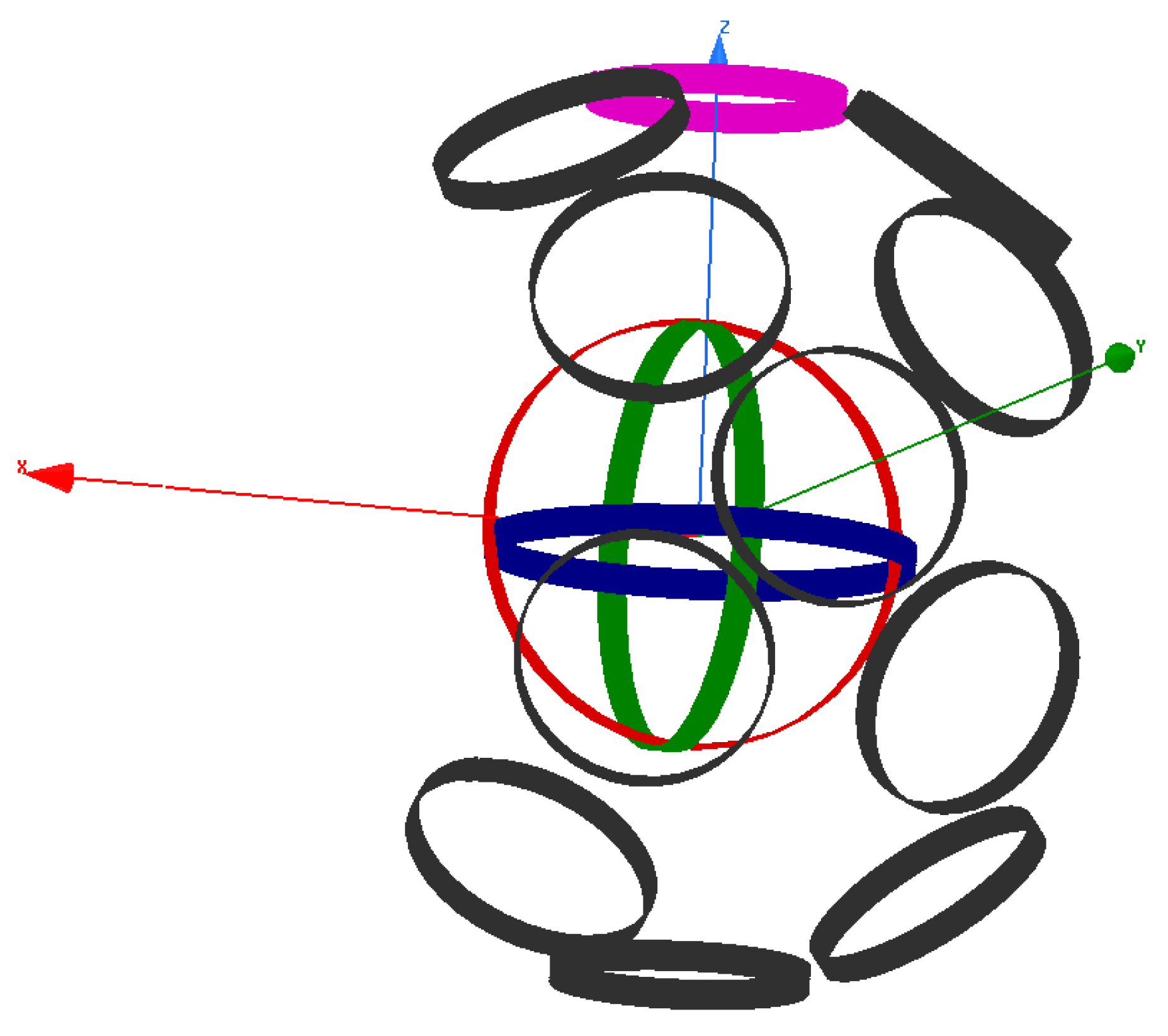
2.2. Model Benchmarking
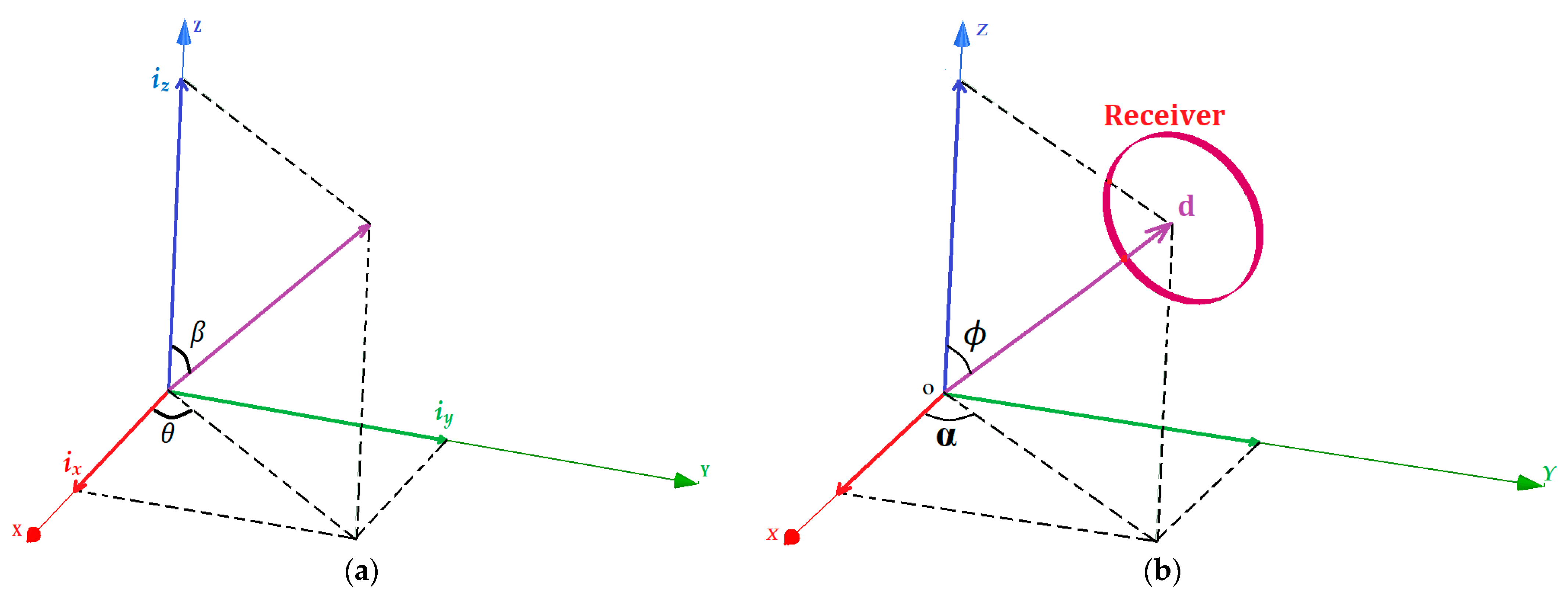
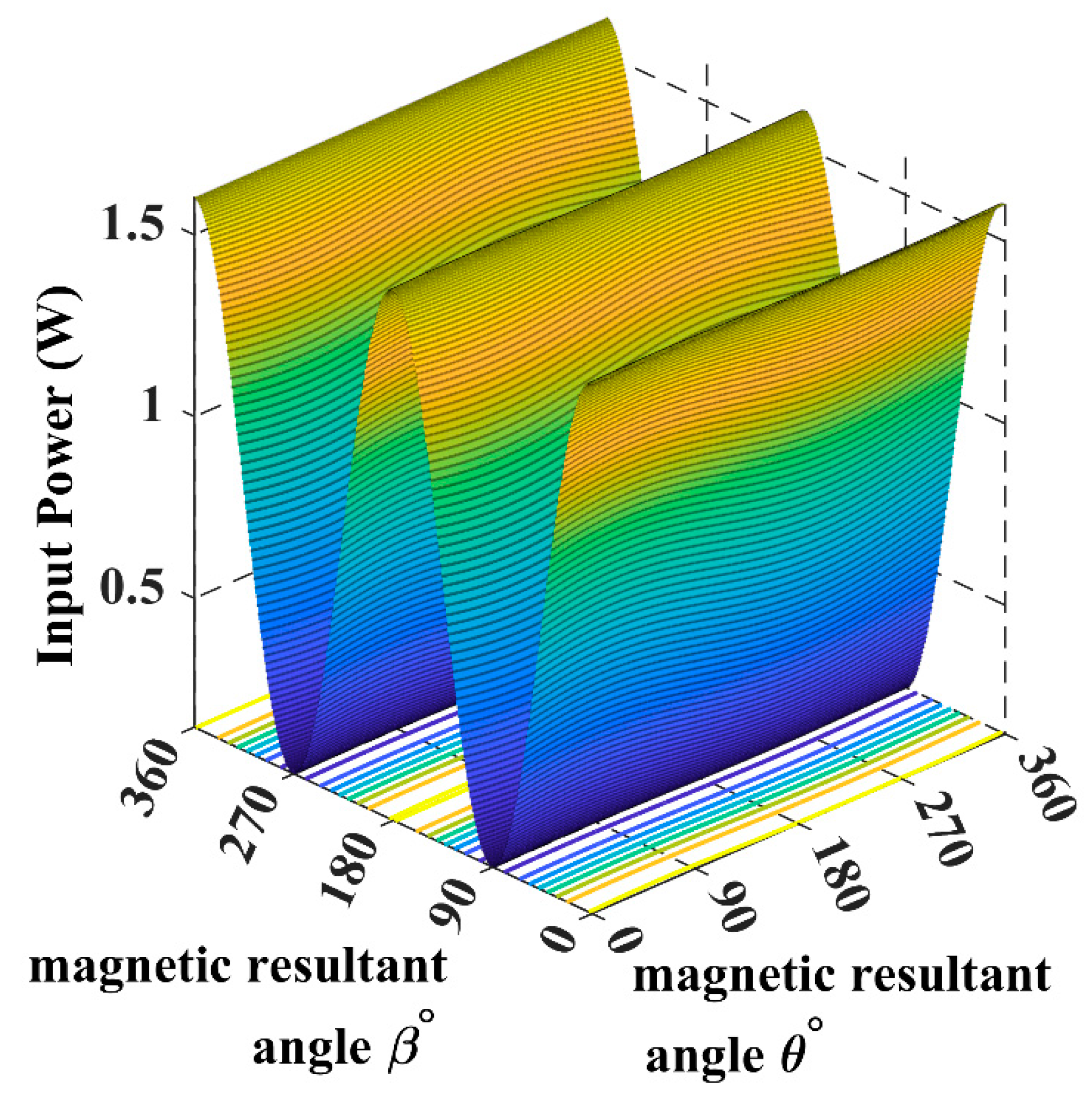
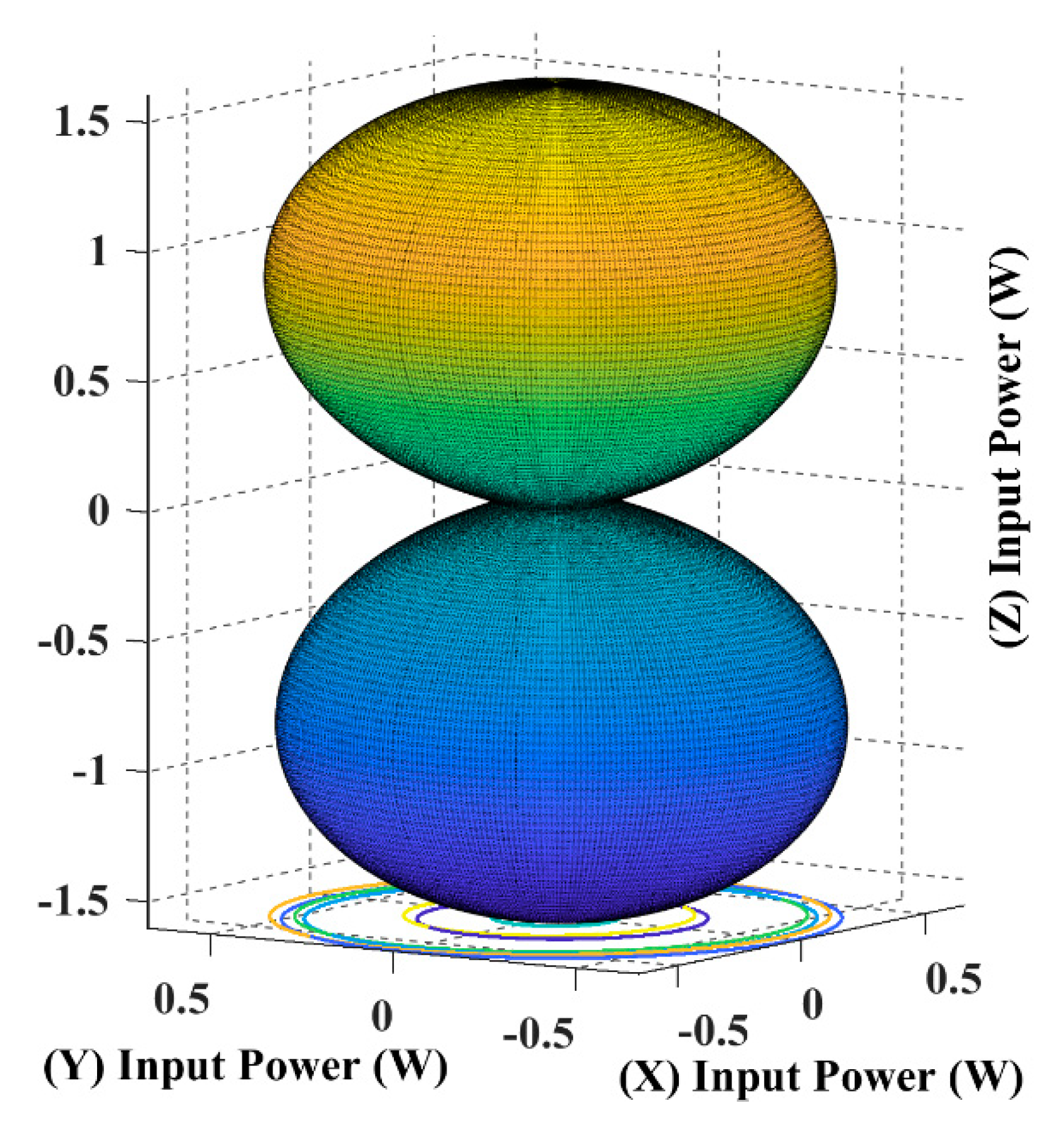
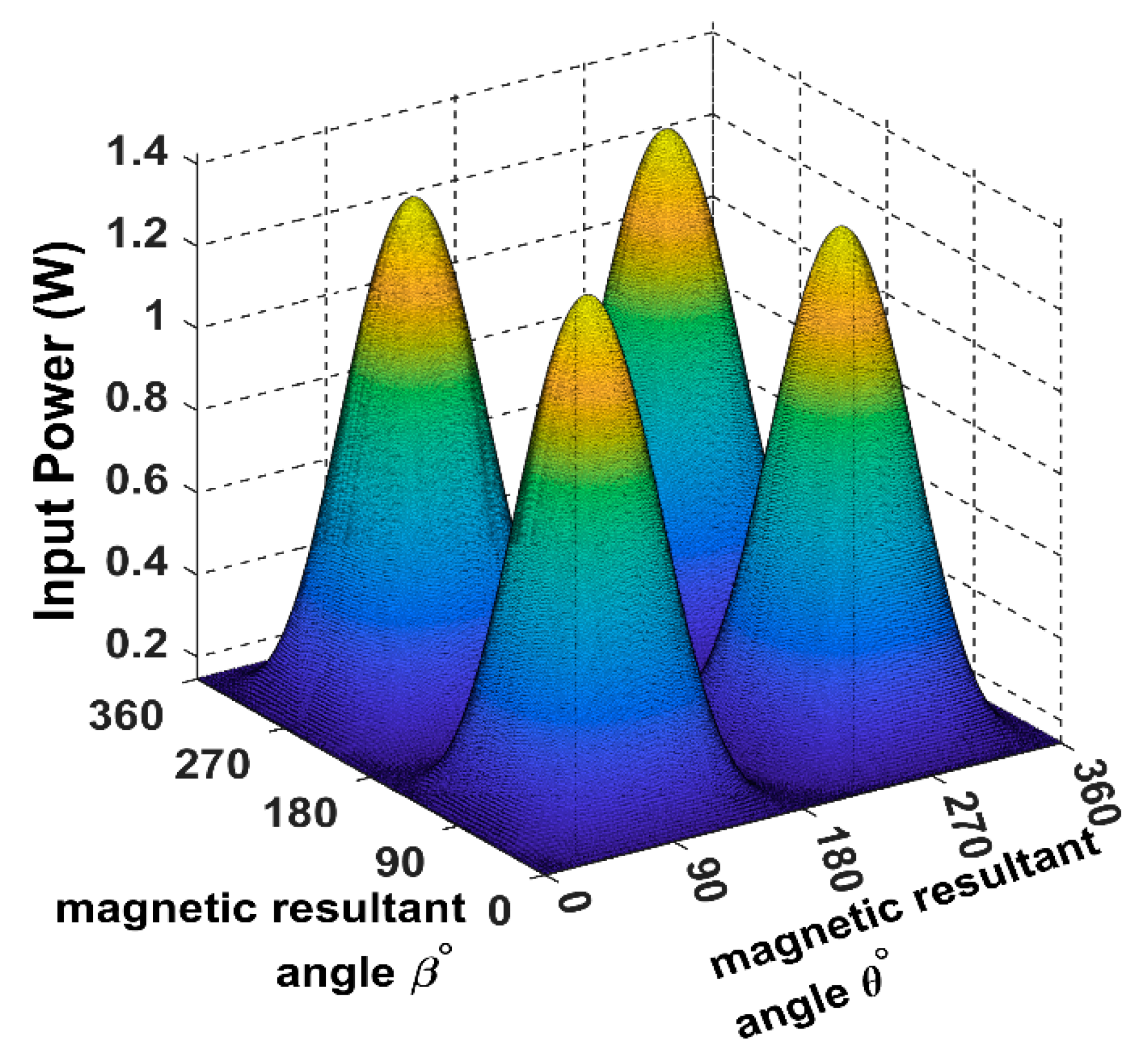
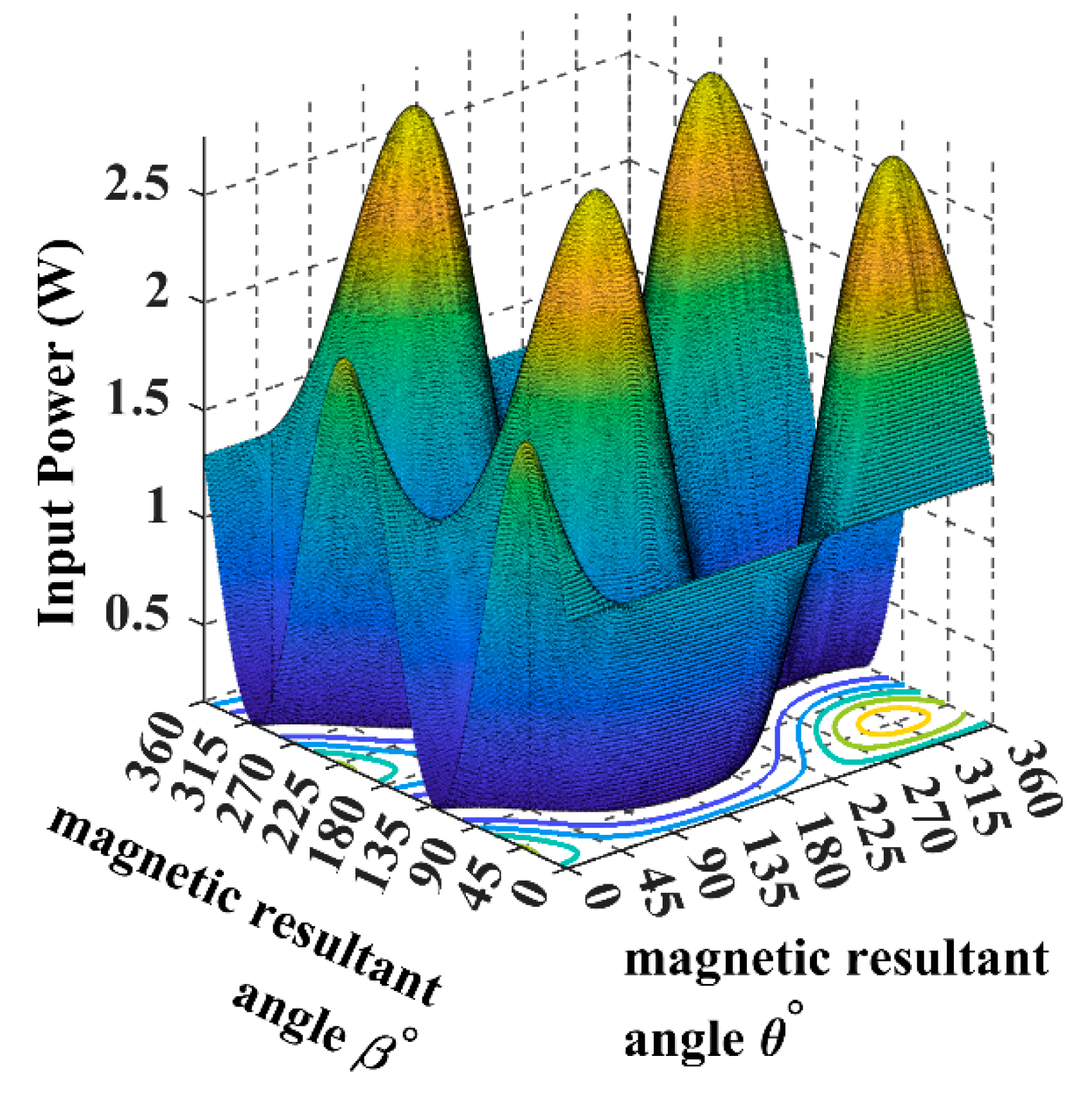
2.3. The 3D WPT System Input Power in Terms of the Receiver Angles
3. The Extremum Seeking Control Implementation for the 3D WPT System
3.1. Extremum Seeking Scheme for the Multi-Parameter System
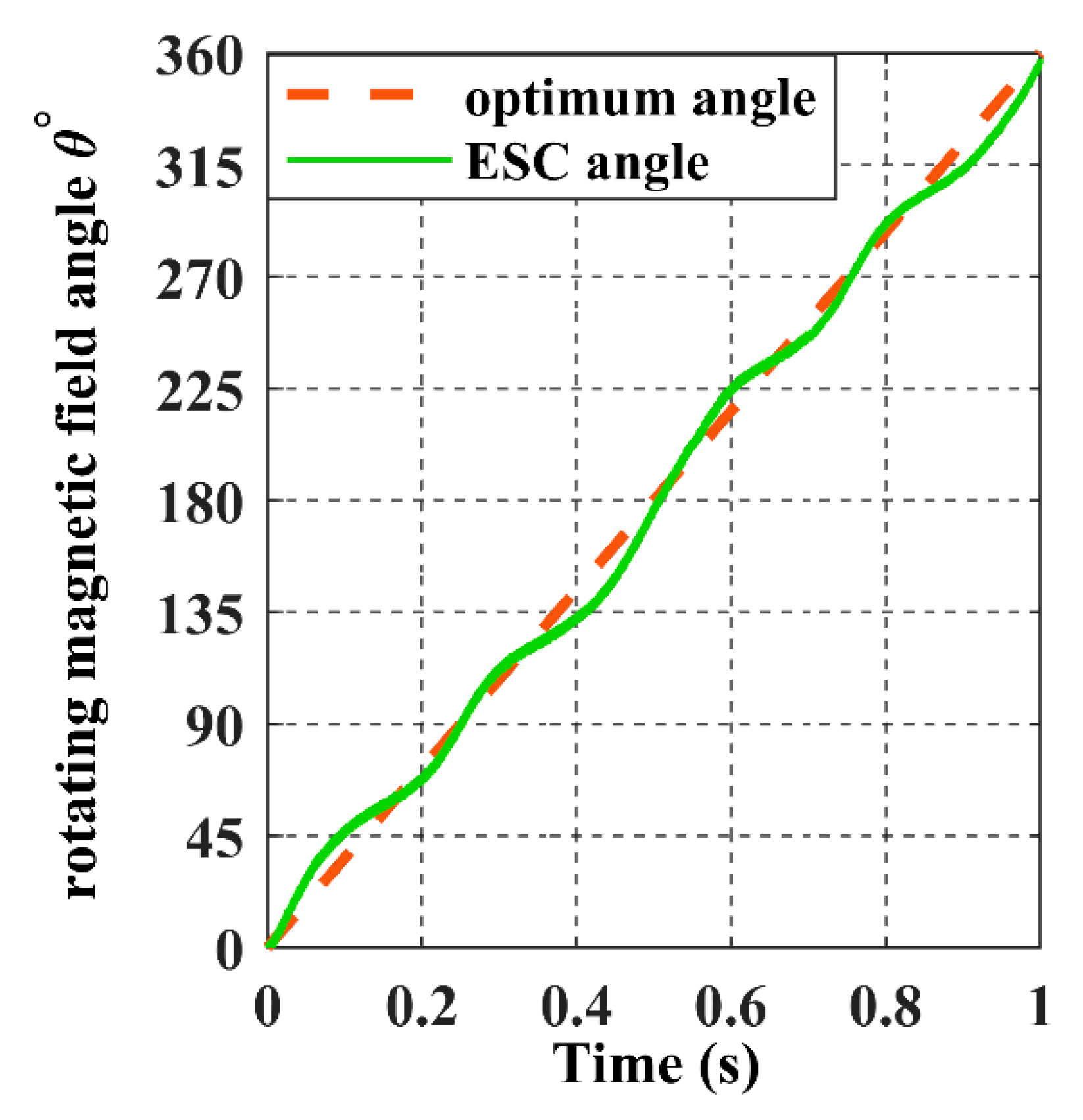
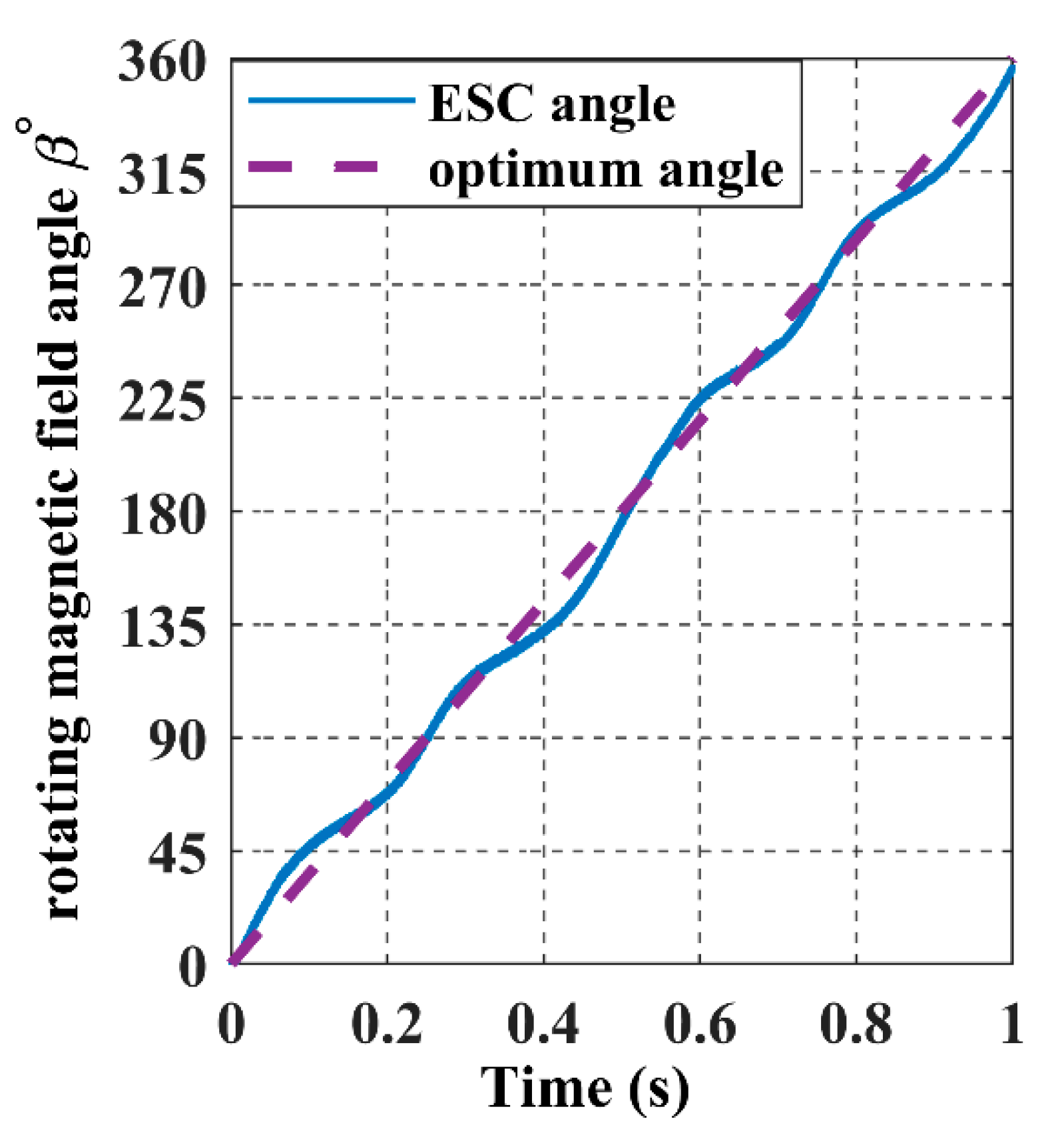
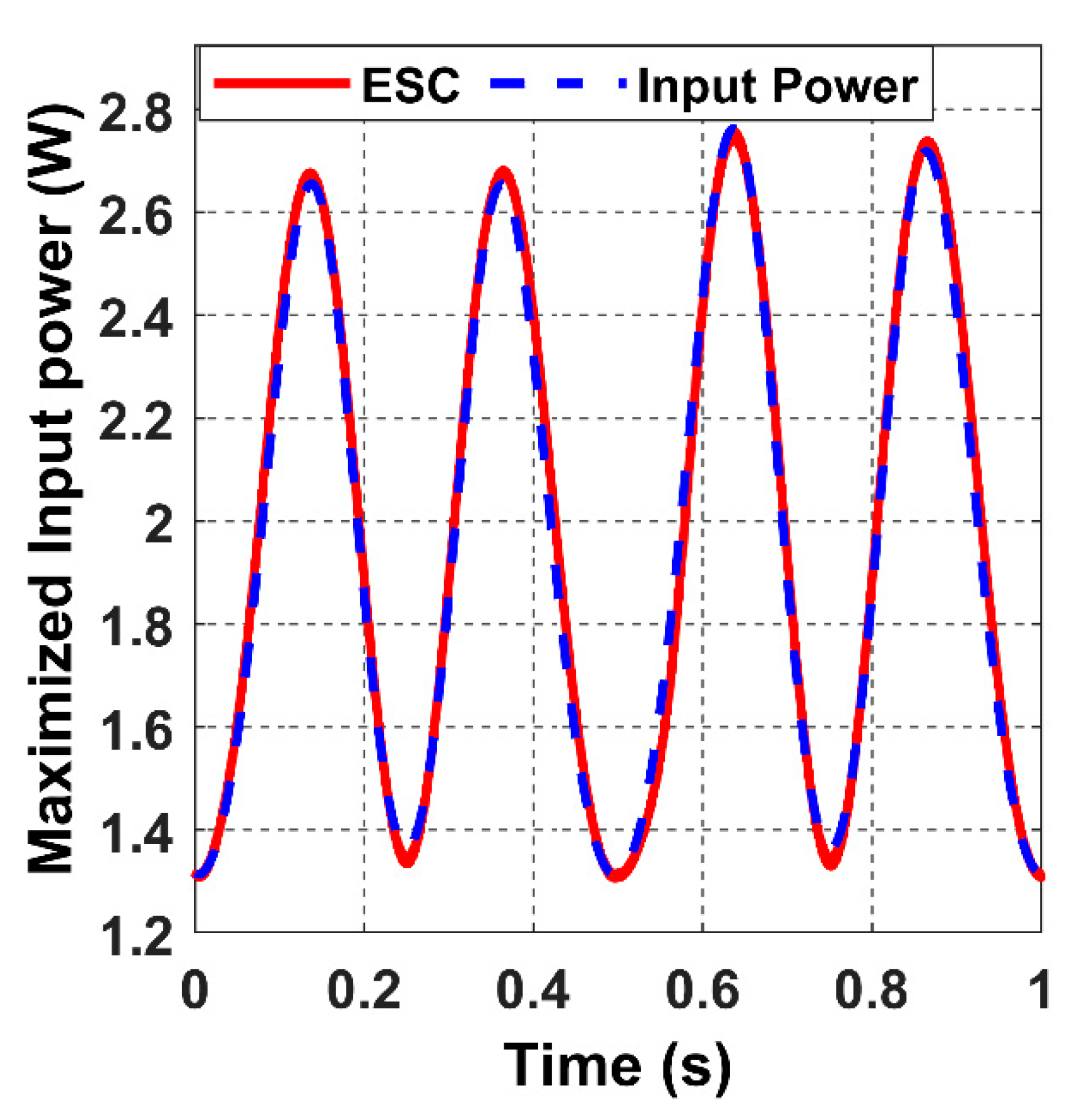
3.2. The Closed-Loop Response When Using ESC for a Continuous Trajectory and Constant Velocity
3.3. The Closed-Loop Response When Using ESC for a Continuous Trajectory with Intermittent Movement
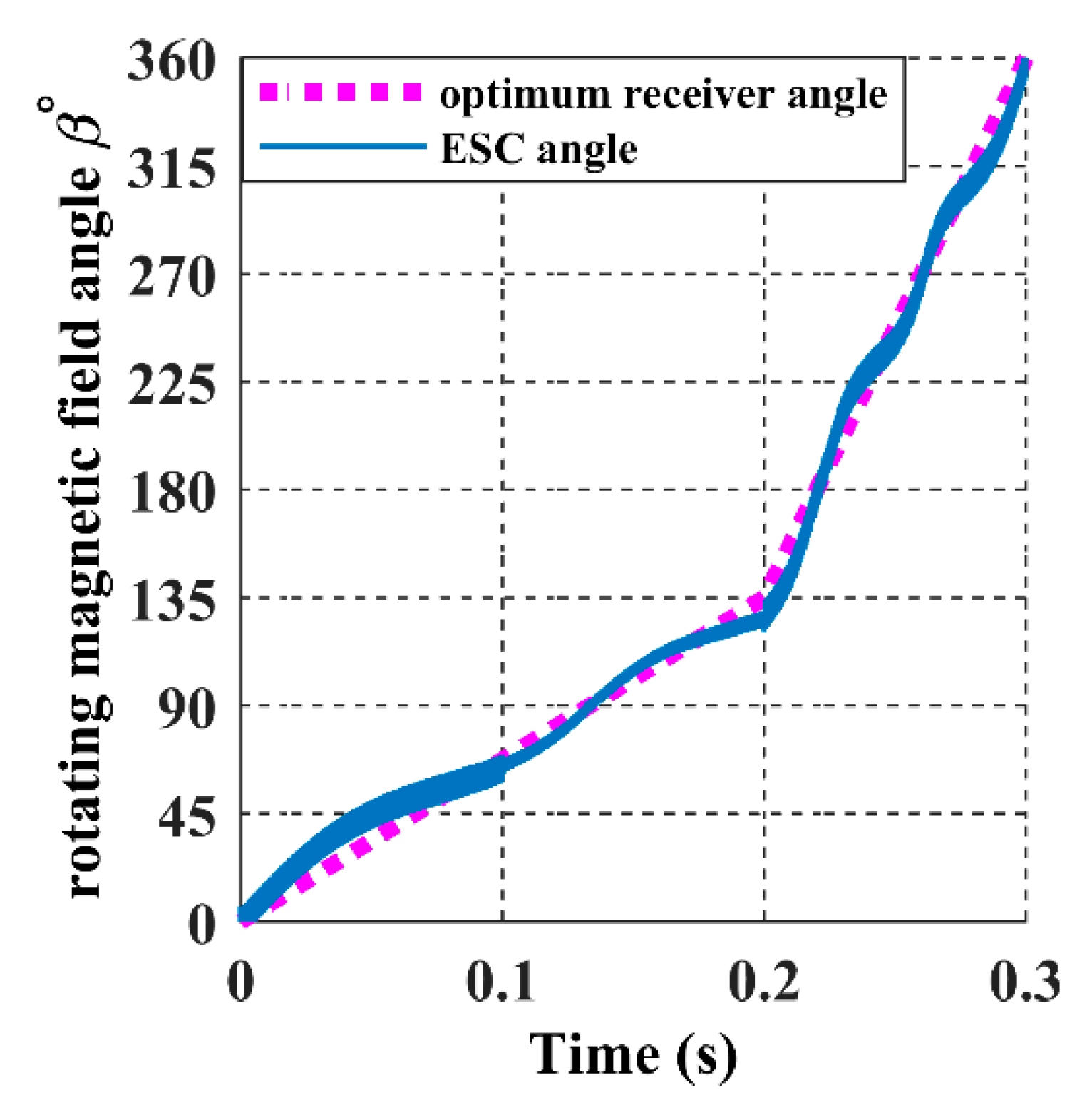
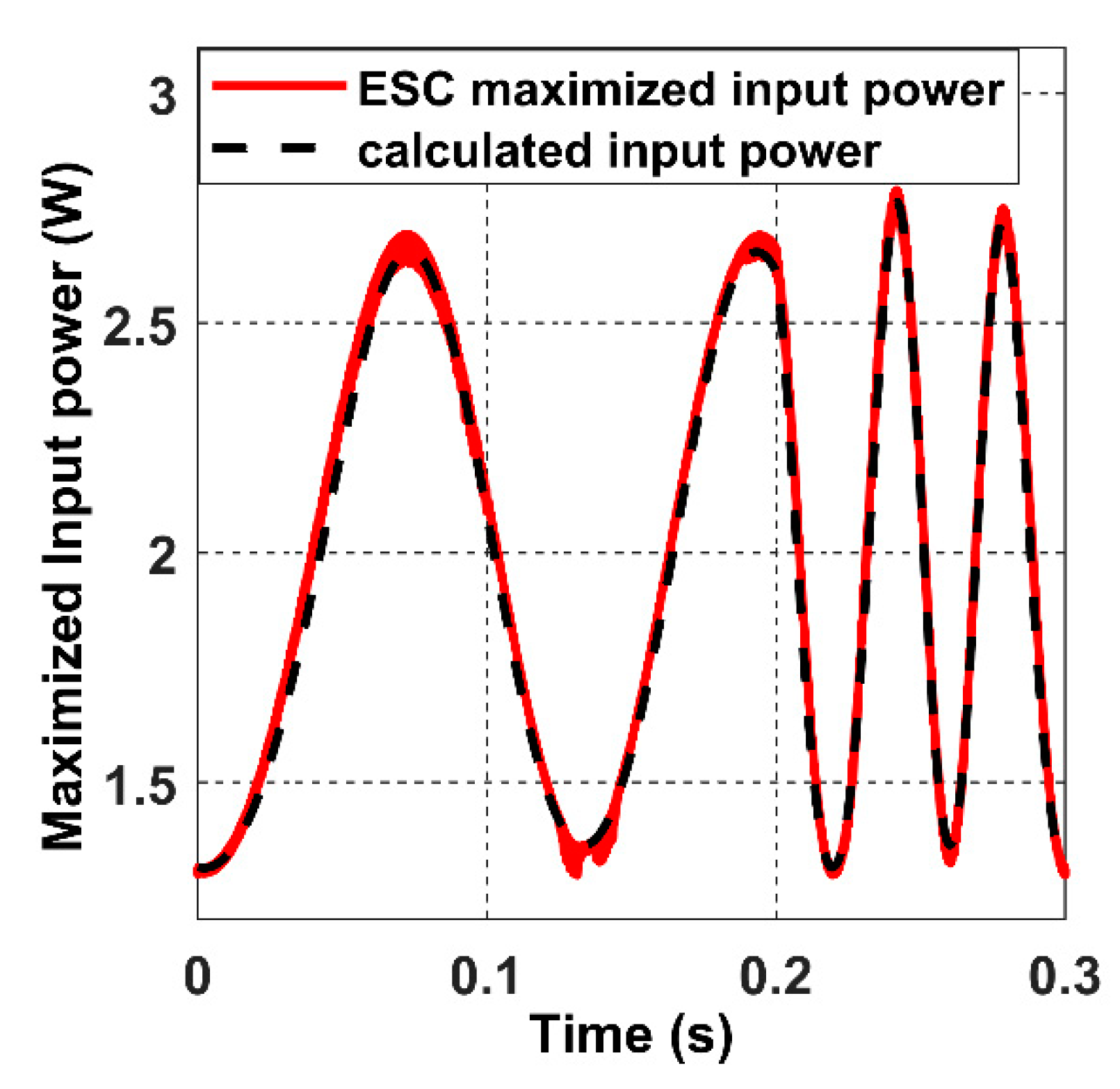
3.4. The Closed-Loop Response When Using ESC for a Continuous Trajectory with an Accelerated Movement
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Cetinkaya, O.; Balsamo, D.; Merrett, G.V. Internet of MIMO Things: UAV-Assisted Wireless-Powered Networks for Future Smart Cities. IEEE Internet Things Mag. 2020, 3, 8–13. [Google Scholar] [CrossRef]
- Rabello, A.; Brito, R.C.; Favarim, F.; Weitzenfeld, A.; Todt, E. Mobile System for Optimized Planning to Drone Flight applied to the Precision Agriculture. In Proceedings of the 2020 3rd International Conference on Information and Computer Technologies (ICICT), San Jose, CA, USA, 9–12 March 2020; pp. 12–16. [Google Scholar]
- Xiao, W.; Li, M.; Alzahrani, B.; Alotaibi, R.; Barnawi, A.; Ai, Q. A Blockchain-Based Secure Crowd Monitoring System Using UAV Swarm. IEEE Netw. 2021, 35, 108–115. [Google Scholar] [CrossRef]
- Vahidi, V.; Saberinia, E.; Morris, B.T. OFDM Performance assessment for traffic surveillance in drone small cells. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2869–2878. [Google Scholar] [CrossRef]
- Busnel, Y.; Caillouet, C.; Coudert, D. Self-Organized Disaster Management System by Distributed Deployment of Connected UAVs. In Proceedings of the 2019 International Conference on Information and Communication Technologies for Disaster Management (ICT-DM), Paris, France, 18–20 December 2019. [Google Scholar]
- Kuo, R.C.; Riehl, P.; Lin, J. 3-D wireless charging system with flexible receiver coil alignment. In Proceedings of the 2016 IEEE Wireless Power Transfer Conference (WPTC), Aveiro, Portugal, 5–6 May 2016; pp. 3–6. [Google Scholar]
- Zhang, W.; Zhang, T.; Guo, Q.; Shao, L.; Zhang, N.; Jin, X.; Yang, J. High-efficiency wireless power transfer system for 3D, unstationary free-positioning and multi-object charging. IET Electr. Power Appl. 2018, 12, 658–665. [Google Scholar] [CrossRef]
- Dai, Z.; Fang, Z.; Huang, H.; He, Y.; Wang, J. Selective Omnidirectional Magnetic Resonant Coupling Wireless Power Transfer with Multiple-Receiver System. IEEE Access 2018, 6, 19287–19294. [Google Scholar] [CrossRef]
- Li, W.; Wang, Q.; Wang, Y.; Kang, J. Three-dimensional rotatable omnidirectional MCR WPT system. IET Power Electron. 2020, 13, 256–265. [Google Scholar] [CrossRef]
- Park, K.R.; Cha, H.R.; Kim, R.Y. Spherical Flux Concentration Transmitter for Omnidirectional Wireless Power Transfer with Improved Power Transmission Distance. In Proceedings of the 2019 IEEE 4th International Future Energy Electronics Conference (IFEEC), Singapore, 25–28 November 2019. [Google Scholar]
- Zhang, Z.; Zhang, B.; Tong, R.; Ai, W.; Chang, S.; Wang, J. Optimal design of quadrature-shaped pickup for omnidirectional wireless power transfer. IEEE Int. Magn. Conf. Intermag. 2018, 54, 2–6. [Google Scholar]
- Kisseleff, S.; Akyildiz, I.F.; Gerstacker, W. Beamforming for magnetic induction based wireless power transfer systems with multiple receivers. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–7. [Google Scholar]
- Wang, H.; Zhang, C.; Yang, Y.; Liang, R.H.W.; Hui, S.Y. A Comparative Study on Overall Efficiency of 2-Dimensional Wireless Power Transfer Systems Using Rotational and Directional Methods. IEEE Trans. Ind. Electron. 2021, 69, 260–269. [Google Scholar] [CrossRef]
- Lim, Y.; Park, J. A Novel Phase-Control-Based Energy Beamforming Techniques in Nonradiative Wireless Power Transfer. IEEE Trans. Power Electron. 2015, 30, 6274–6287. [Google Scholar] [CrossRef]
- Lin, D.; Zhang, C.; Hui, S.Y.R. Mathematic Analysis of Omnidirectional Wireless Power Transfer-Part-II Three-Dimensional Systems. IEEE Trans. Power Electron. 2017, 32, 613–624. [Google Scholar] [CrossRef]
- Zhang, C.; Lin, D.; Hui, S.Y. Basic Control Principles of Omnidirectional Wireless Power Transfer. IEEE Trans. Power Electron. 2016, 31, 5215–5227. [Google Scholar]
- Lin, D.; Zhang, C.; Hui, S.R. Mathematical analysis of omnidirectional wireless power transfer—Part-I: Two-dimensional systems. IEEE Trans. Power Electron. 2016, 32, 625–633. [Google Scholar] [CrossRef]
- Su, M.; Liu, Z.; Zhu, Q.; Hu, A.P. Study of maximum power delivery to movable device in omnidirectional wireless power transfer system. IEEE Access 2018, 6, 76153–76164. [Google Scholar] [CrossRef]
- Lin, D.; Hui, S.Y.R.; Zhang, C. Omni-directional wireless power transfer systems using discrete magnetic field vector control. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3203–3208. [Google Scholar]
- Ariyur, K.B.; Krstic, M. Real-Time Optimization by Extremum-Seeking Control; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coils | Turns | The Current Resultant I (A) | Frequency (kHz) | Coils Resistance R (Ω) | L (µH) | C (ηF) | Coils Radius(m) | Load Resistance RL (Ω) |
|---|---|---|---|---|---|---|---|---|
| Tx | 11 | 0.45 | 550.77 | 0.72 | 82.03 | 1 | 0.3 | |
| Ty | 11 | 0.45 | 550.77 | 0.72 | 82.03 | 1 | 0.3 | |
| Tz | 11 | 0.45 | 550.77 | 0.72 | 82.03 | 1 | 0.3 | |
| Receiver | 11 | 550.77 | 0.72 | 82.03 | 1 | 0.3 | 10 |
| θ (deg) | Mx-L2 | My-L2 | Mz-L2 |
|---|---|---|---|
| 45 | 2.372 µH | 2.361 μH | ~0 |
| 90 | ~0 | 2.579 μH | ~0 |
| 180 | −2.607 μH | ~0 | ~0 |
| θ/ϕ (deg) | M14 | M24 | M34 |
|---|---|---|---|
| 45 | 2.009 μH | 2.009 μH | 2.009 μH |
| 90 | 2.319 μH | ~0 | ~0 |
| 180 | ~0 | ~0 | −2.27 μH |
| Pin | Pout | |||
|---|---|---|---|---|
| Pinx (W) | Piny (W) | Pinz (W) | Pintotal (W) | |
| 0.29 | 1.21 | 0.04 | 1.54 | 1.07 |
| Ref. [16] | Ref. [15] | This Work | |
|---|---|---|---|
| Method | Scanning method | Mathematical method | Multiparameter Extremum Seeking Control algorithm |
| System | 3D-WPT | 3D-WPT | 3D-WPT |
| Control Method | weighted time-sharing | Mathematical | Continuous Optimisation |
| Transmitting Coil structure | Orthogonal circular coils | Orthogonal circular coils | Orthogonal circular coils |
| Algorithm implementation | Complex, poor expensive | Complex, poor, expensive | Simple computation no control unit is needed no discretisation or signal processing is needed. |
| Receiver dynamics (Continuous trajectory) | Not covered | Not covered | Continues rotational trajectory |
| Receiver dynamics (velocity acceleration) | Not covered | Not covered | Covered |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allama, O.; Habaebi, M.H.; Khan, S.; Elsheikh, E.A.A.; Suliman, F.M. Modelling and Control Design of a Non-Collaborative UAV Wireless Charging System. Sensors 2022, 22, 7897. https://doi.org/10.3390/s22207897
Allama O, Habaebi MH, Khan S, Elsheikh EAA, Suliman FM. Modelling and Control Design of a Non-Collaborative UAV Wireless Charging System. Sensors. 2022; 22(20):7897. https://doi.org/10.3390/s22207897
Chicago/Turabian StyleAllama, Oussama, Mohamed Hadi Habaebi, Sheroz Khan, Elfatih A. A. Elsheikh, and F. M. Suliman. 2022. "Modelling and Control Design of a Non-Collaborative UAV Wireless Charging System" Sensors 22, no. 20: 7897. https://doi.org/10.3390/s22207897