

The Long-Range Biomimetic Covert Communication Method Mimicking Large Whale

Abstract
:1. Introduction
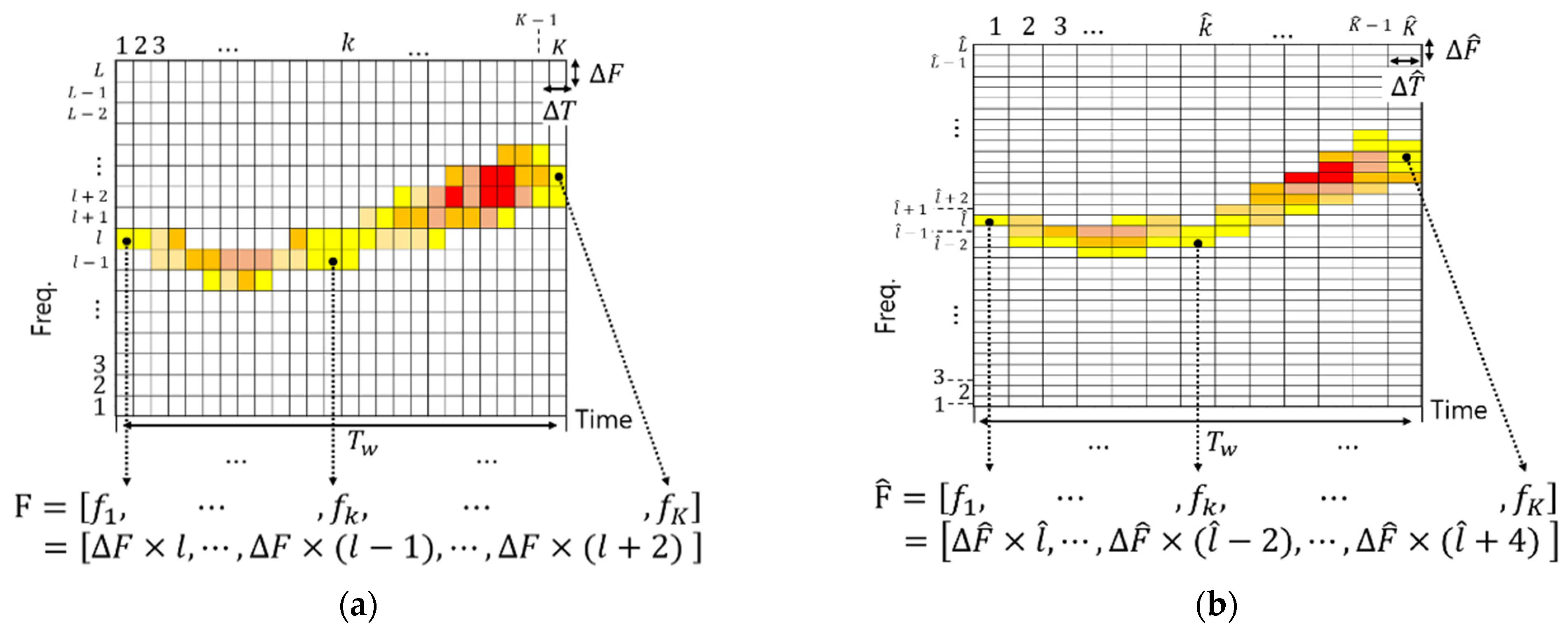
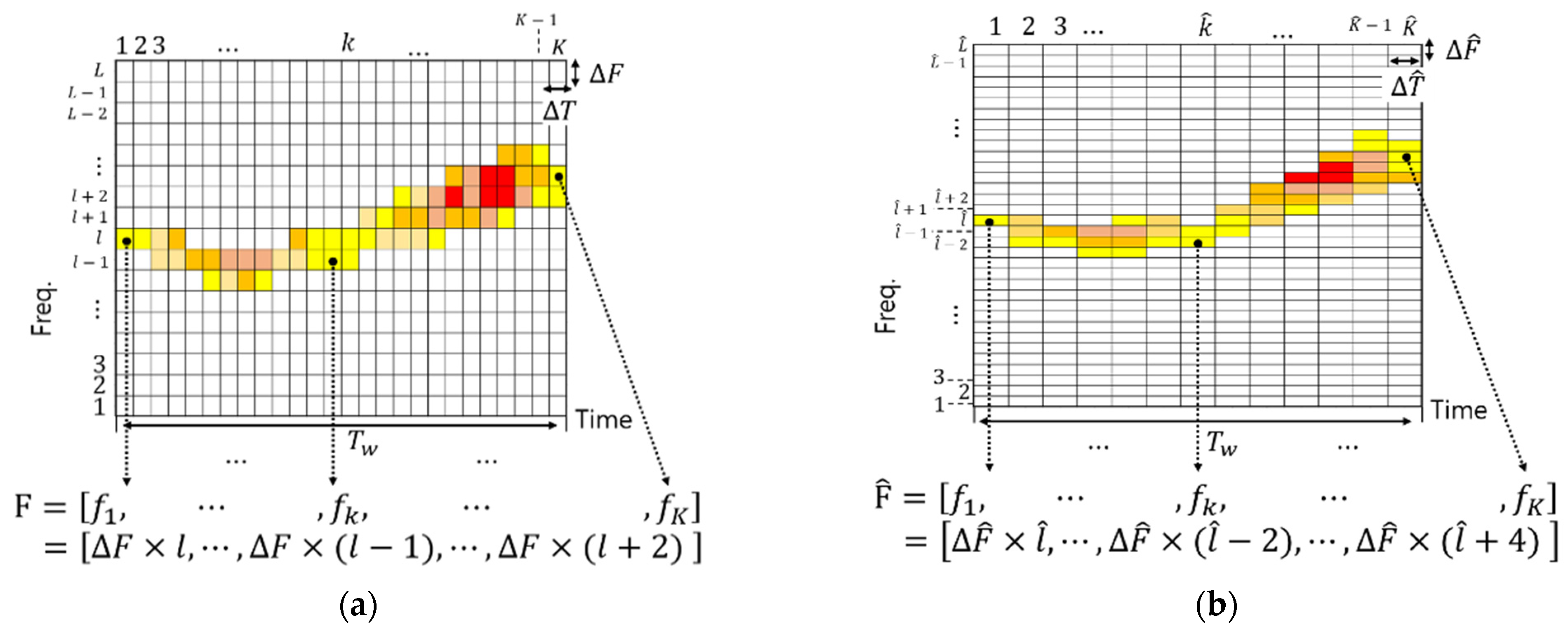
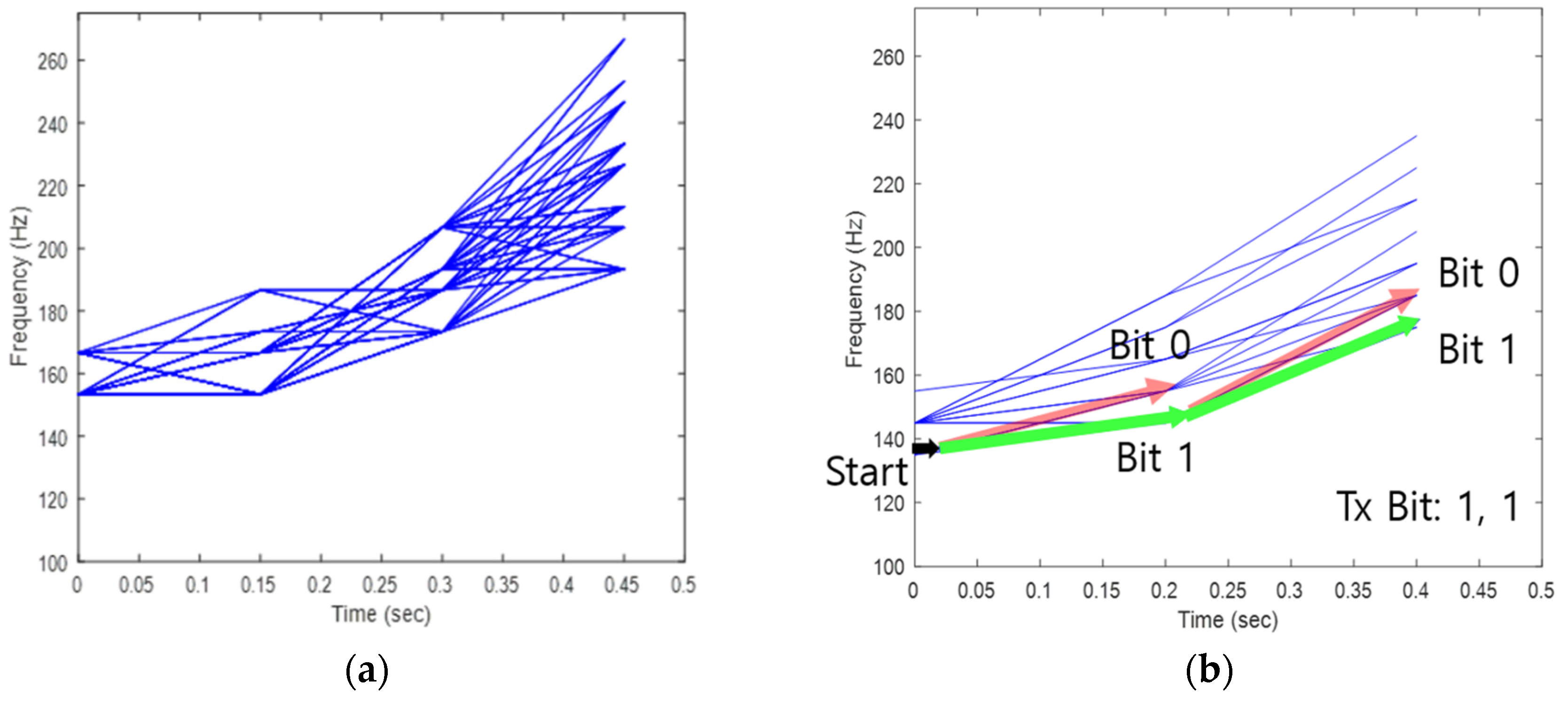
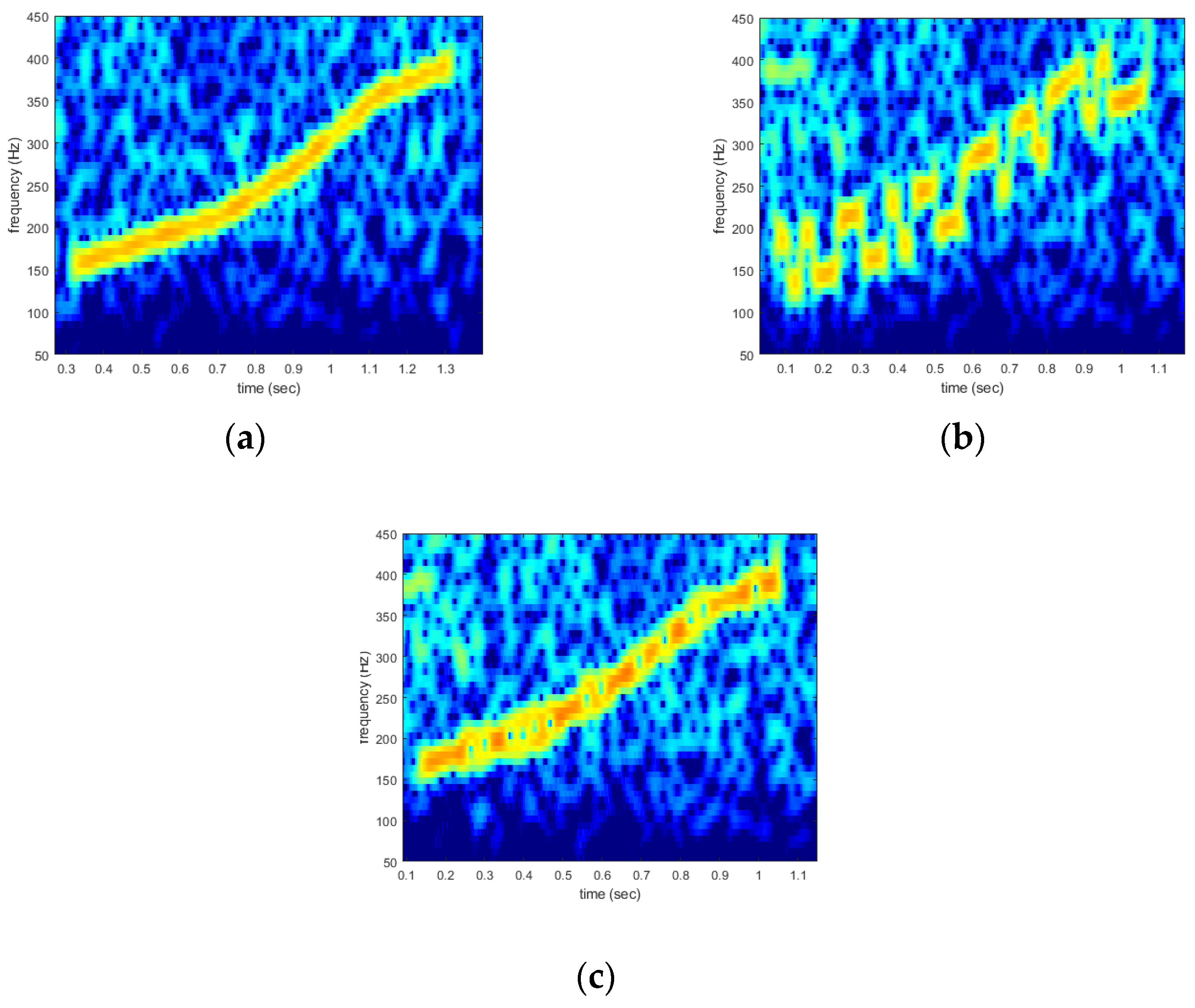
- We modeled the time-dependent frequency change of the whistle of the right humpback whale (RHW) using the Markov chain (MC). The modeled results can be employed to select the frequency values used by the whistle. Note that we considered the time-frequency orthogonality of the symbol to preserve low BER when modeling the frequency change of the whistle.
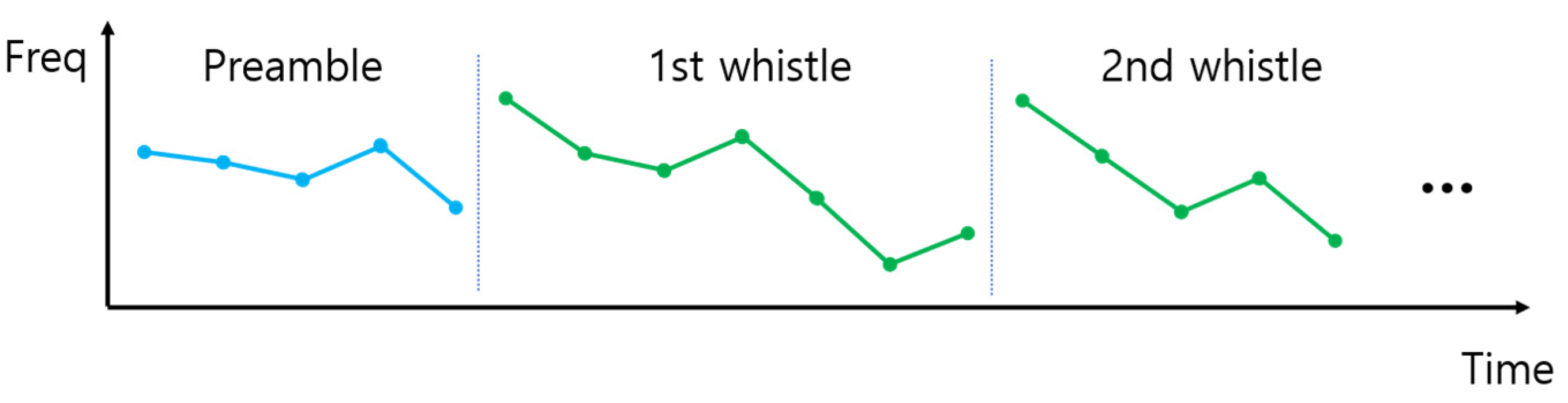
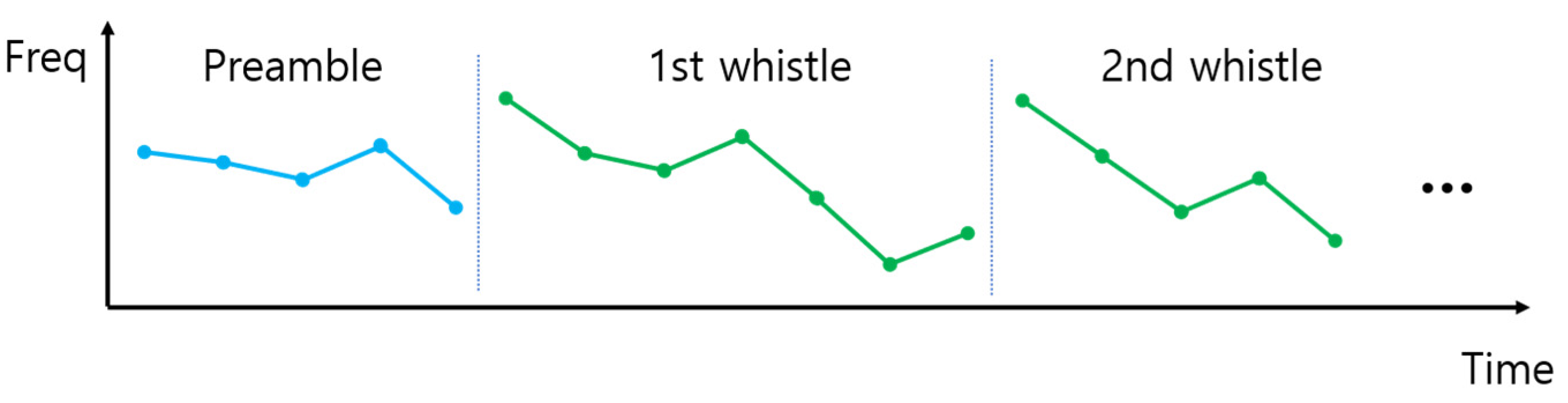
- The proposed modulation method preserves the signal shape of the whistle because it modulates bits using frequency values that whales use to generate a whistle. Thus, the whistle-mimicking communication signal generated by the proposed modulation method shows improved performance of the DoM and tolerance of large multipath delay.
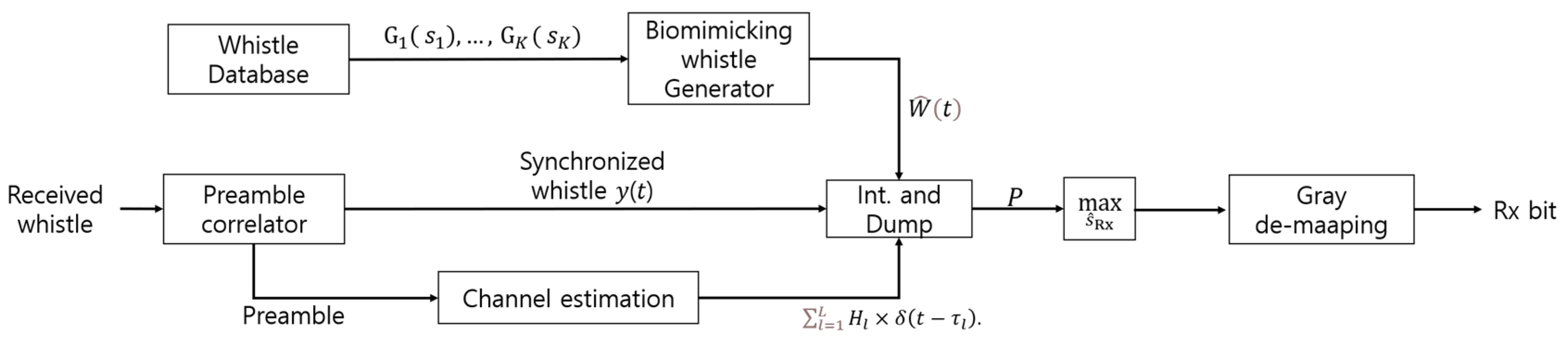
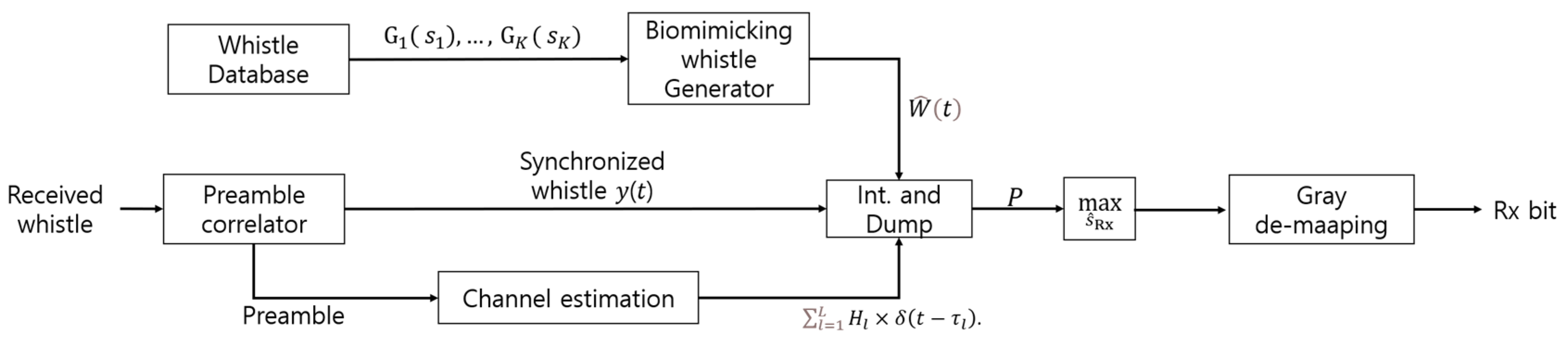
- The proposed demodulation method estimates the multipath delay profile using a preamble and increases received signal gain using the estimated profile. Thus, the proposed method achieves low BER in a long-range underwater environment with a large multipath delay.
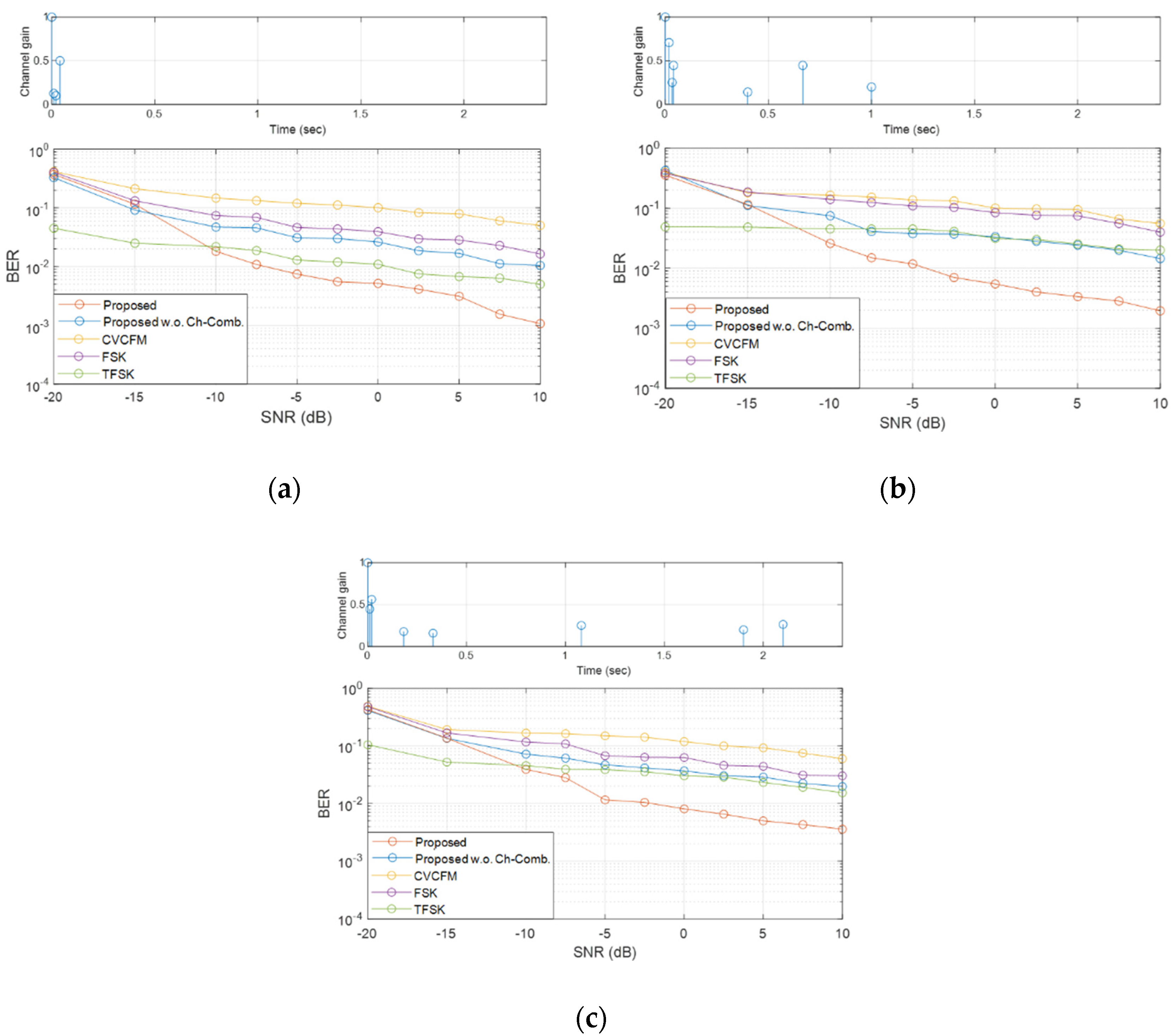
- Computer simulations and practical ocean experiments were conducted and demonstrated that the proposed method had a lower BER than conventional covert communication methods.
- Since the proposed modulation method makes a whistle using modeling results, a machine learning-based DoM assessment was conducted. The assessment results show that the trained machine learning classifier recognized the whistle-mimicking signal generated by the proposed modulation method as the whistle of the RHW. This result shows that machine learning can be used as an effective evaluation method for the DoM performance of biomimetic communication.
2. Modeling Whistles of the Right Humpback Whale
3. The Proposed Biomimicking Communication Method
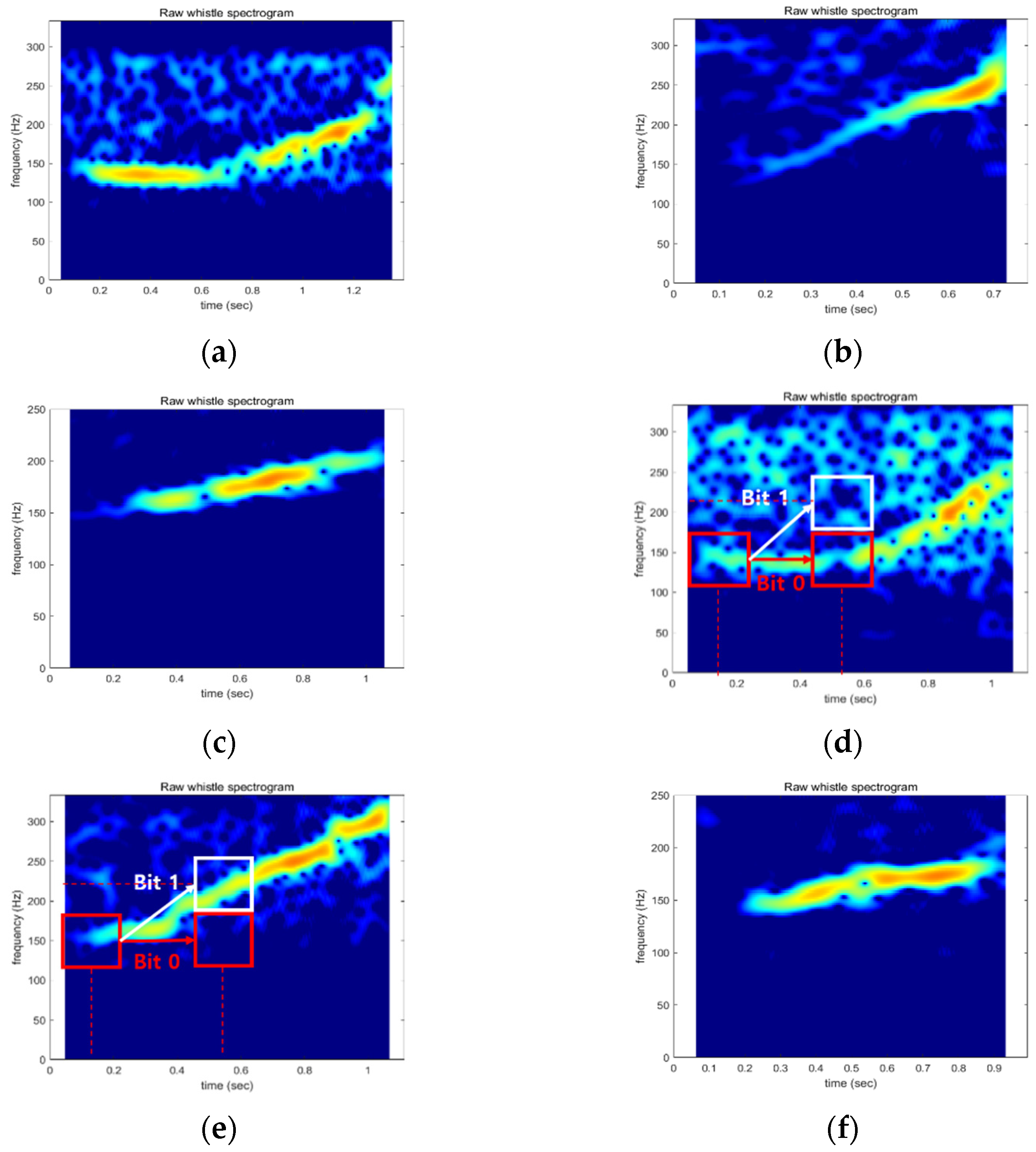
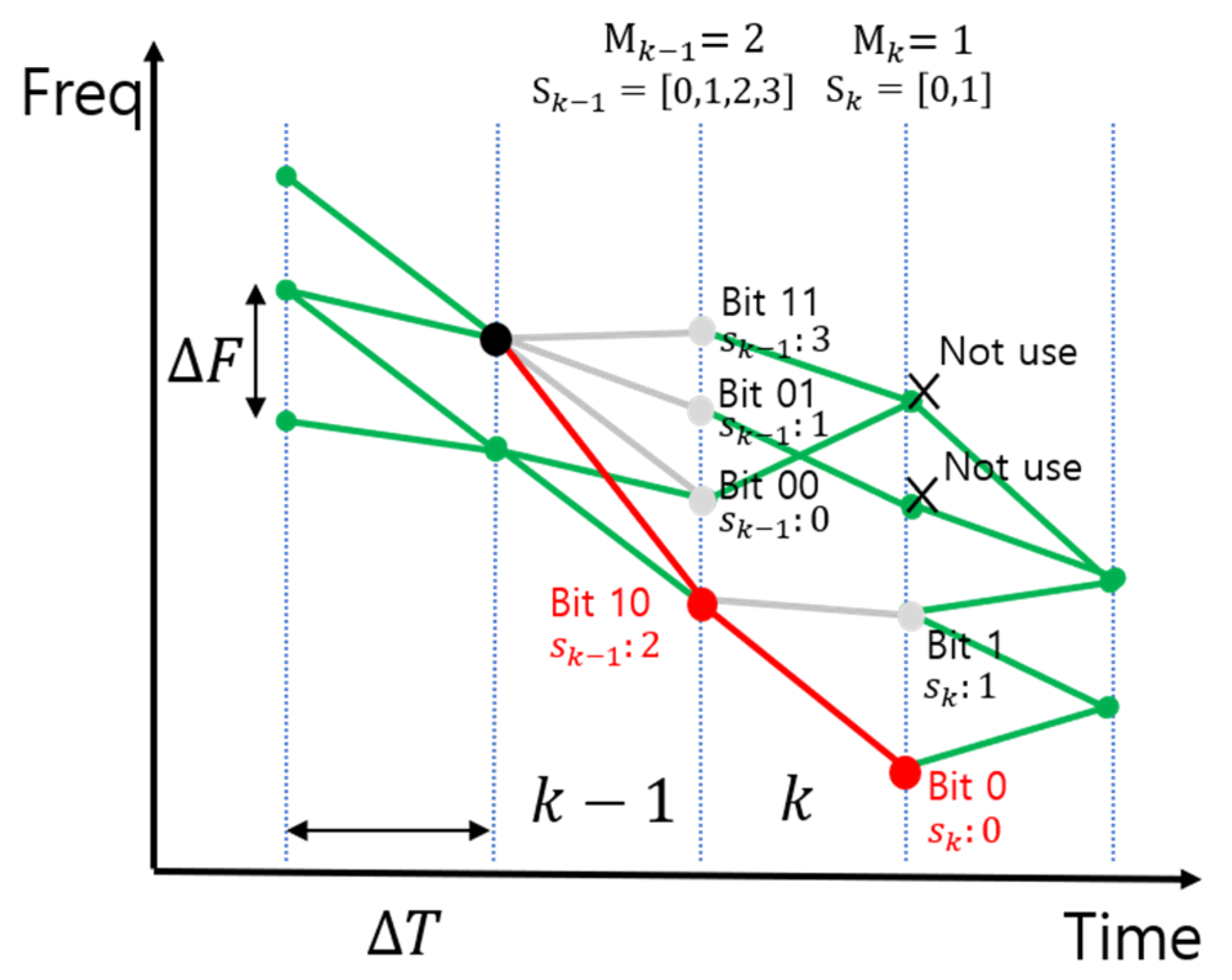
3.1. The Proposed Biomimicking Modulation Method
3.2. The Proposed Biomimicking Demodulation Method
4. Evaluation of Degree-of-Mimic Performance
5. Evaluation of Communication Performance
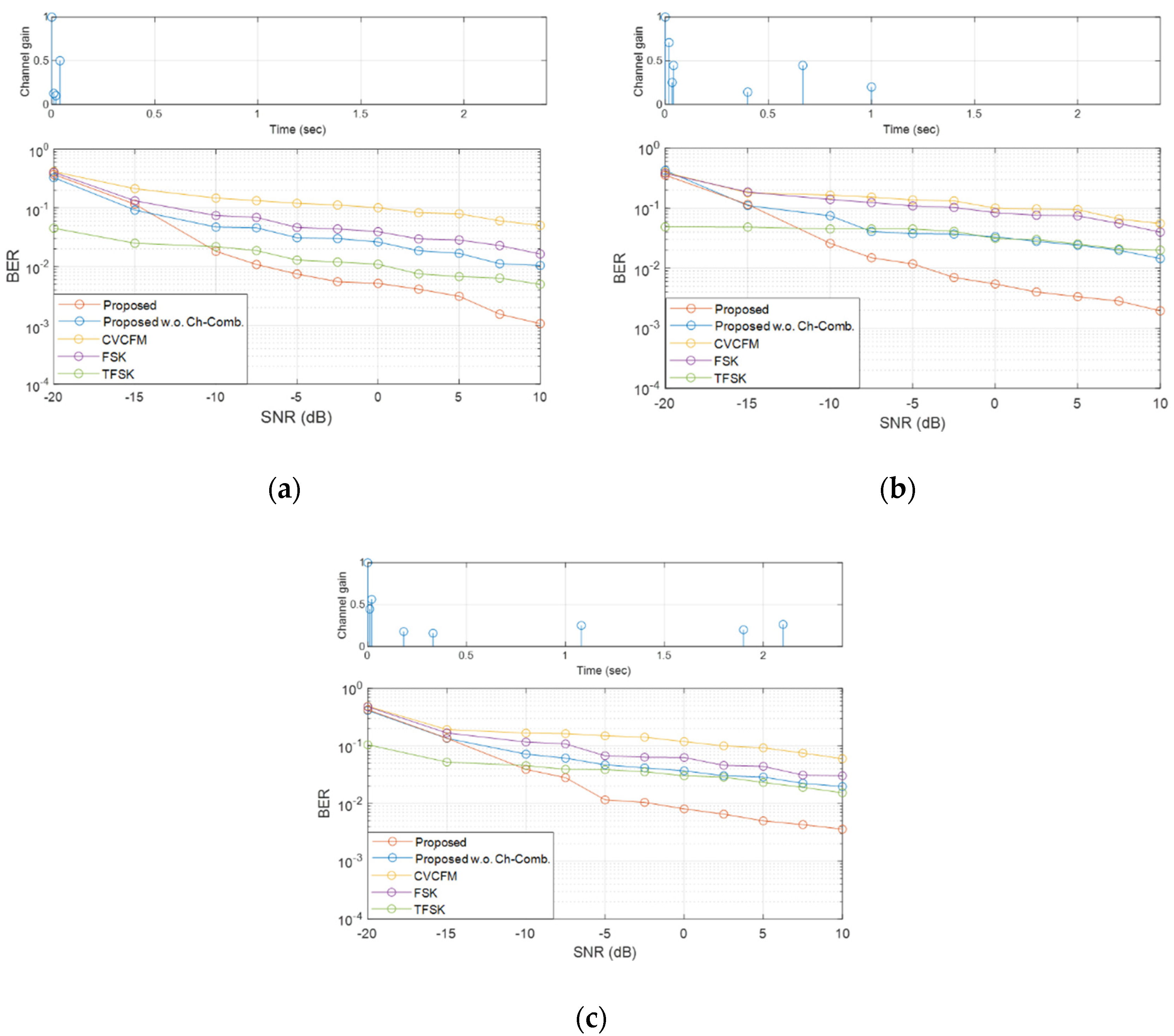
5.1. Simulation
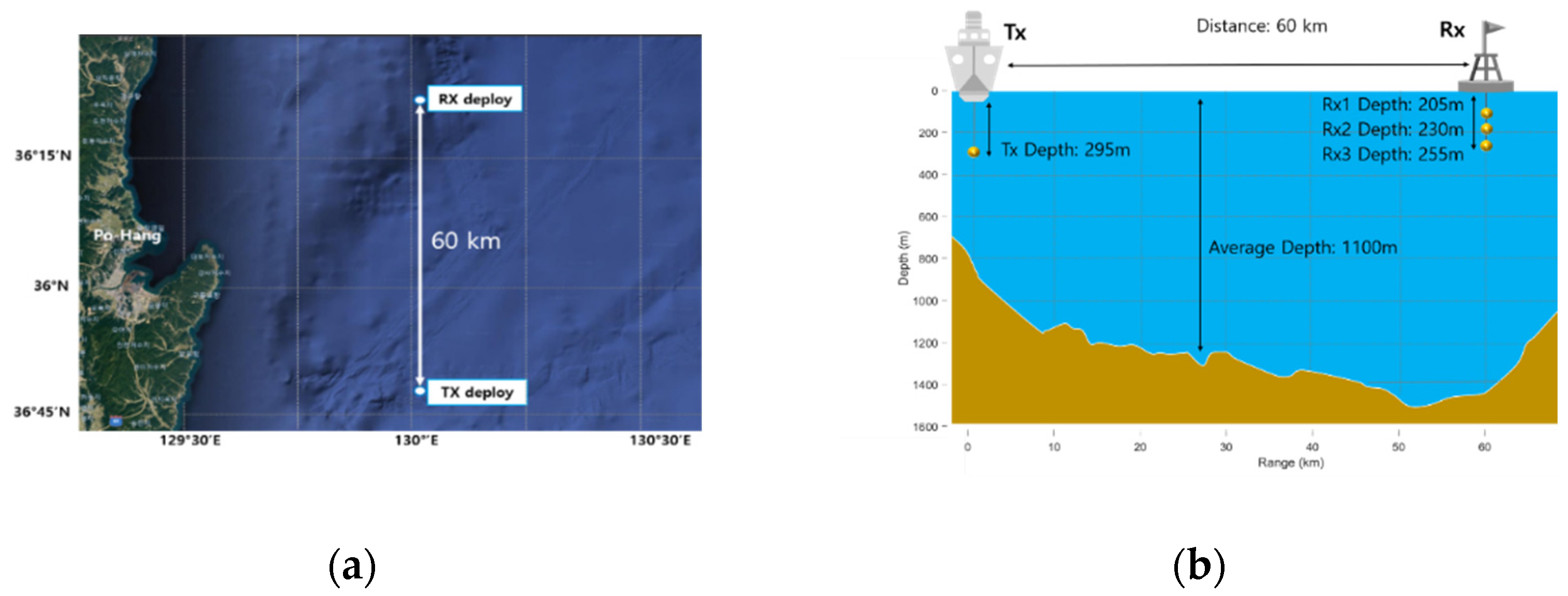
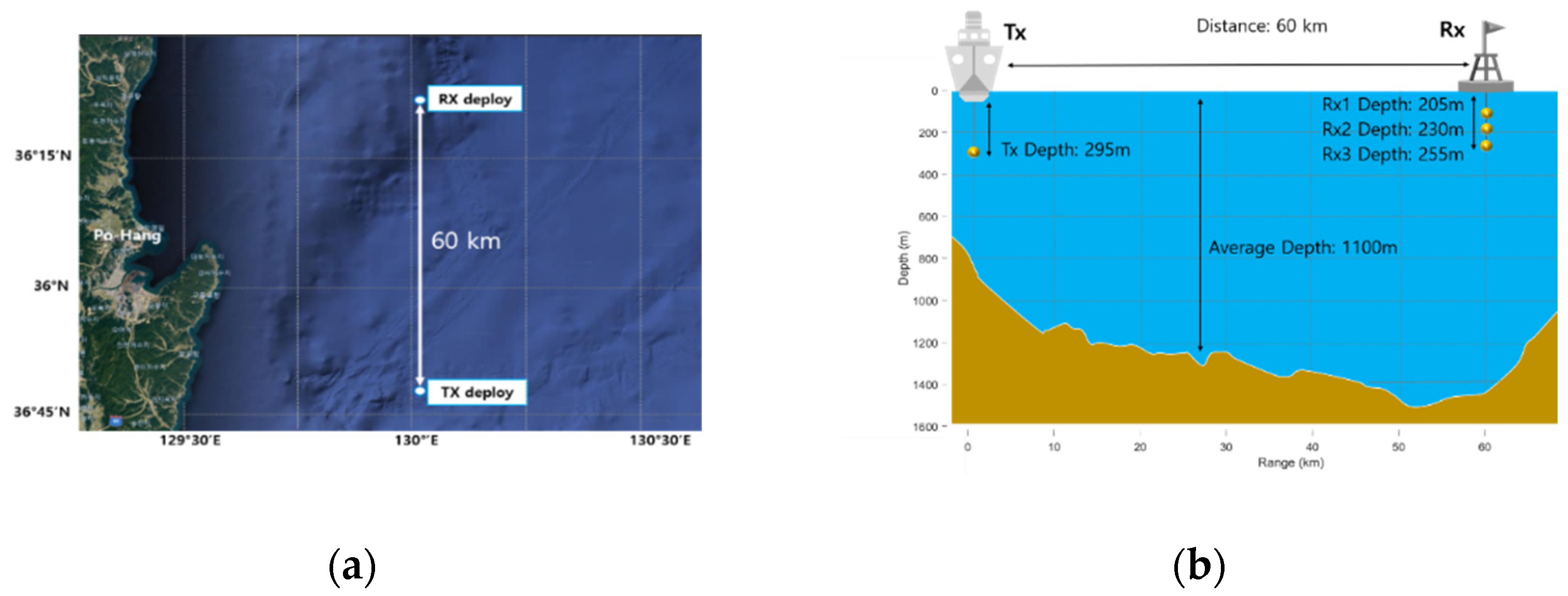
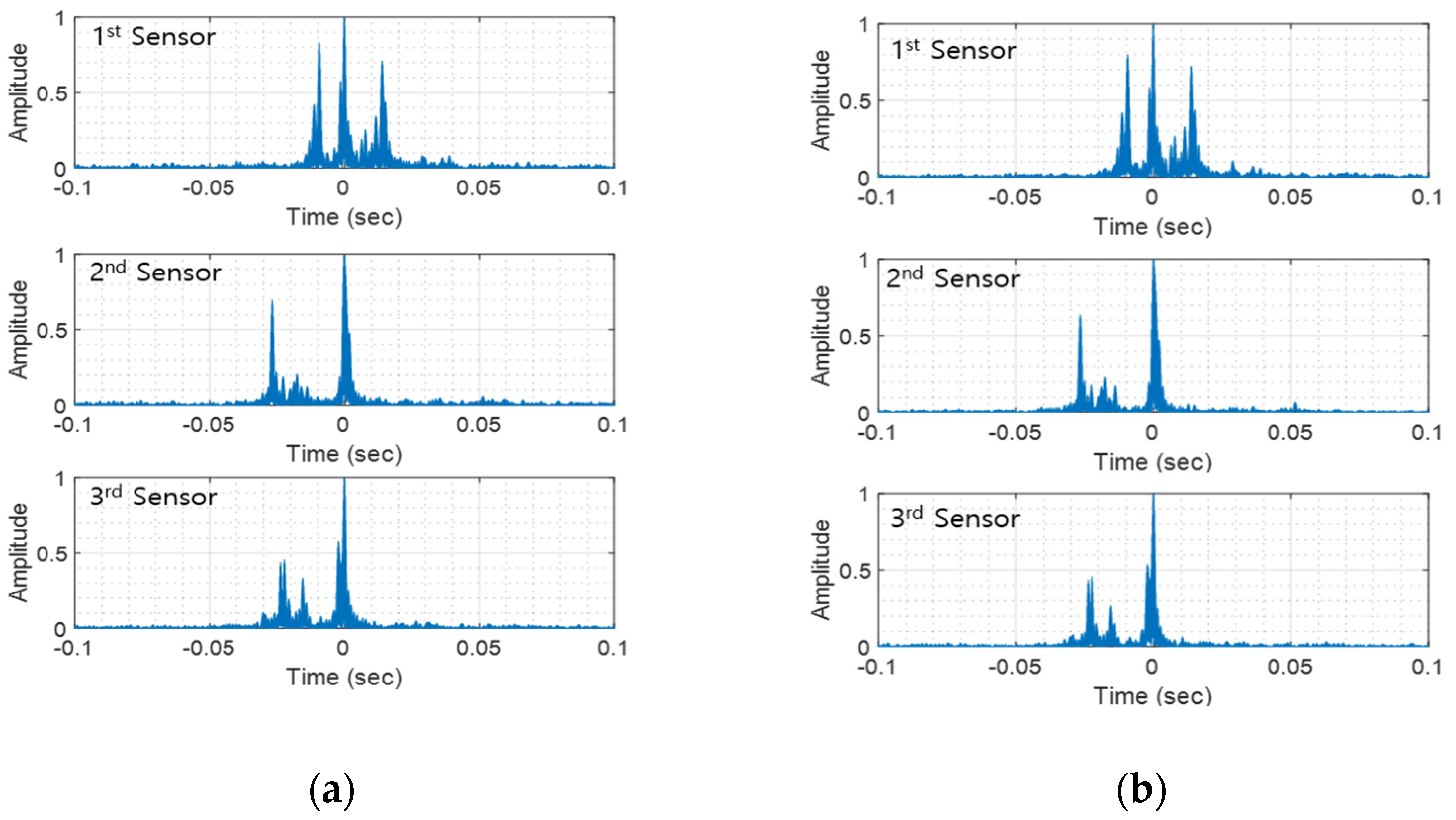
5.2. Ocean Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, S.; Qiao, G.; Ismail, A. Covert underwater acoustic communication using dolphin sounds. J. Acoust. Soc. Am. 2013, 133, EL300–EL306. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Yin, J.; Du, P.; Zhang, X. Experimental demonstration of underwater acoustic communication using bionic signals. J. Appl. Acoust. 2013, 78, 7–10. [Google Scholar] [CrossRef]
- ElMoslimany, A.; Zhou, M.; Duman, T.M.; Papandreou-Suppappola, A. An underwater acoustic communication scheme exploiting biological sounds. J. Wirel. Commun. Mob. Comput. 2016, 16, 2194–2211. [Google Scholar] [CrossRef]
- Liu, S.; Wang, M.; Ma, T.; Qiao, G.; Bilal, M. Covert underwater communication by camouflaging sea piling sounds. J. Appl. Acoust. 2018, 142, 29–35. [Google Scholar] [CrossRef]
- Bilal, M.; Liu, S.; Qiao, G.; Wan, L.; Tao, Y. Bionic Morse coding mimicking humpback whale song for covert underwater communication. J. Appl. Sci. 2019, 10, 186. [Google Scholar] [CrossRef] [Green Version]
- Qiao, G.; Ma, T.; Liu, S.; Bilal, M. A frequency hopping pattern inspired bionic underwater acoustic communication. J. Phys. Commun. 2021, 46, 101288. [Google Scholar] [CrossRef]
- Ma, T.; Liu, S.; Qiao, G.; Pu, W. Bionic underwater acoustic communication by mimicking dolphin whistle based on frequency shift keying. J. Electron. Inf. Tech. 2022, 44, 720. [Google Scholar]
- Ahn, J.; Lee, H.; Kim, Y.; Kim, W.; Chung, J. Multipath combining method for frequency shift keying underwater communications mimicking dolphin whistle. J. Acoust. Soc. Korea 2018, 37, 404–411. [Google Scholar]
- Lee, H.; Ahn, J.; Kim, Y.; Lee, S.; Chung, J. A biomimetic communication method based on time shift using dolphin whistle. J. Acoust. Soc. Korea 2019, 38, 580–586. [Google Scholar]
- Lee, H.; Ahn, J.; Kim, Y.; Lee, S.; Chung, J. Time-frequency modulation based mimicking dolphin whistle for covert underwater acoustic communication. J. Jpn. Appl. Phys. 2020, 59, SKKF03. [Google Scholar] [CrossRef]
- Ahn, J.; Lee, H.; Kim, Y.; Kim, W.; Chung, J. Machine learning based biomimetic underwater covert acoustic communication method using dolphin whistle contours. J. Sens. 2020, 20, 6166. [Google Scholar] [CrossRef]
- Lee, H.; Kim, Y.; Seol, S.; Kim, W.; Ahn, J.; Chung, J. Mimicking Multiple Whale Whistles-Based Underwater Covert Communication. J. IEEE Access 2022, 10, 43934–43942. [Google Scholar] [CrossRef]
- Ahn, J.; Lee, H.; Kim, Y.; Lee, S.; Chung, J. Mimicking dolphin whistles with continuously varying carrier frequency modulation for covert underwater acoustic communication. J. Jpn. Appl. Phys. 2019, 58, SGGF05. [Google Scholar] [CrossRef]
- Ahn, J.; Lee, H.; Kim, Y.; Kim, W.; Chung, J. Biomimicking covert communication by time-frequency shift modulation for increasing mimicking and BER performances. J. Sens. 2021, 6, 2184. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.C.; Wenbin, Y. Low probability of detection underwater acoustic communications using direct-sequence spread spectrum. J. Acoust. Soc. Am. 2008, 124, 3632–3647. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jun, J.; Hao, H.; William, R. Covert underwater acoustic communications. J. Acoust. Soc. Am. 2010, 148, 2898–2909. [Google Scholar]
- Xiujun, S.; Jun, W.; Haibin, W.; Xiaoxia, Y. Chaotic direct sequence spread spectrum for secure underwater acoustic communication. J. Appl. Sci. 2016, 104, 57–66. [Google Scholar]
- Fengzhong, Q.; Xiangzhao, Q.; Liuqing, Y.; Yang, T.C. Spread-spectrum method using multiple sequences for underwater acoustic communications. J. IEEE Ocean Eng. 2018, 43, 1215–1226. [Google Scholar]
- Freitag, L.; Stojanovic, M. Basin-scale acoustic communication: A feasibility study using tomography m-sequences. In Proceedings of the MTS/IEEE Oceans, Honolulu, HI, USA, 5–8 November 2011. [Google Scholar]
- Song, H.; Cho, S.; Kang, T.; Hodgkiss, W.; Preston, J. Long range acoustic communication in deep water using a towed array. J. Acoust. Soc. Am. 2011, 129, 71–75. [Google Scholar] [CrossRef]
- Kang, T.; Song, H.; Hodgkiss, W. Long-range multicarrier acoustic communication in deep water using a towed horizontal array. J. Acoust. Soc. Am. 2012, 131, 4665–4671. [Google Scholar] [CrossRef] [Green Version]
- Shimura, T.; Ochi, H.; Watanabe, Y.; Hattori, T. Results of basic at-sea experiments on time-reversal communication in the deep ocean. In Proceedings of the MTS/IEEE Oceans, Kobe, Japan, 8–11 April 2008. [Google Scholar]
- Shimura, T.; Ochi, H.; Watanabe, Y.; Hattori, T. Experiment results of time-reversal communication at the range of 300 km. J. Jpn. Appl. Phys. 2011, 49, 07HG11. [Google Scholar] [CrossRef]
- Shimura, T.; Watanabe, Y.; Ochi, H.; Song, H. Long-range time reversal communication in deep water Experimental results. J. Acoust. Soc. Am. 2012, 132, 49–53. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shimura, T.; Ochi, H.; Watanabe, Y.; Hitori, T. Time reversal communication in deep ocean results of recent experiments. In Proceedings of the 2011 IEEE Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 5–8 April 2011. [Google Scholar]
- Moore, B. An Introduction to the Psychology of Hearing, 6th ed.; Emerald Group Publishing: Binglry, UK, 2012. [Google Scholar]
- Munger, L.; Wiggins, S.; Hidebrand, J. North Pacific right whale up-call source levels and propagation range on the southeastern Bering Sea Shelf. J. Acoust. Soc. Am. 2011, 129, 4047–4054. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crance, J.; Berchok, C.; Wright, D.; Brewer, A.; Woodrich, D. Song production by the North Pacific right whale, Eubalaena japonica. J. Acoust. Soc. Am. 2011, 145, 3467. [Google Scholar] [CrossRef] [PubMed]
- Parks, S.; Tyack, P. Sound production by North Atlantic right whales (Eubalaena glacialis) in surface active groups. J. Acoust. Soc. Am. 2005, 117, 3297. [Google Scholar] [CrossRef]
- Parks, S.; Tyack, P. Short- and long-term changes in right whale calling behavior: The potential effects of noise on acoustic communication. J. Acoust. Soc. Am. 2007, 6, 3725. [Google Scholar] [CrossRef]
- Lafferty, J.; Zhai, C. Document language models, query models, and risk minimization for information retrieval. In Proceedings of the 24th Annual International ACM SIGIR Conference on Research and Development in Information Retrieval, New Orleans, LA, USA, 9–13 September 2001. [Google Scholar]
- Geyer, J. Practical markov chain monte carlo. J. Stat. Sci. 1992, 7, 473–483. [Google Scholar] [CrossRef]
- Stephen, P. Markov chain Monte Carlo method and its application. J. R. Stat. Soc. 1998, 47, 69–100. [Google Scholar]
- Popov, V.; Langrock, R.; Deruiter, S.; Visser, F. An analysis of pilot whale vocalization activity using hidden Markov models. J. Acoust. Soc. Am. 2017, 141, 159. [Google Scholar] [CrossRef] [Green Version]
- Tennessen, J.; Holt, M.; Ward, E.; Hanson, M.; Emmons, C.; Giles, D.; Hogan, J. Hidden Markov models reveal temporal patterns and sex differences in killer whale behavior. J. Sci. Rep. 2019, 9, 14951. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Wang, X.; Duan, F.; Liu, W.; Bu, L.; Li, F.; Li, C.; Sun, Z.; Ma, S.; Deng, C. Study of the relationship between pilot whale (Globicephala mela) behavior and the ambiguity function of its sounds. J. Appl. Acoust. 2019, 146, 31–37. [Google Scholar] [CrossRef]
- Pace, F. Automated Classification of Humpback Whale (Megaptera novaeangliae) Songs Using Hidden Markov Models. Ph.D. Thesis, University of Southampton, Southampton, UK, May 2013. [Google Scholar]
- Available online: https://www.kaggle.com/competitions/whale-detection-challenge/data (accessed on 25 August 2022).
- Esfahanian, M.; Erdol, N.; Gerstein, E.; Zhuang, H. Two-stage detection of north Atlantic right whale upcalls using local binary patterns and machine learning algorithms. J. Appl. Acoust. 2017, 120, 158–166. [Google Scholar] [CrossRef]
- Available online: https://github.com/nmkridler/moby (accessed on 25 August 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulation Scheme | Proposed | FSK | CV-CFM and TFSK |
|---|---|---|---|
| Recognition probability | 95% | 10% | 60% |
| Proposed | CV-CFM | FSK | TFSK | ||||||
|---|---|---|---|---|---|---|---|---|---|
| (s) symbol duration | 0.075 | 0.1 | 0.125 | 0.15 | 0.175 | 0.2 | 0.067 | 0.0667 | 0.067 M = 4 |
| (Hz) bandwidth | 26.6 | 20 | 16 | 13.4 | 11.5 | 10 | 15 M = 2 | 15 M = 2 | 30 M = 4 |
| Data rate | 12 bps | 12 bps | 15 bps | 7 bps | |||||
| Ref. | Bandwidth | Range | Number of Paths | Maximum Delay |
|---|---|---|---|---|
| [16] | Fc: 250 Hz BW: 100 Hz | 550 km | 2 | 30 ms |
| [17] | Fc: 250 Hz BW: 50 Hz | 500 km 700 km | 1~2 | 600 ms |
| [18] | Fc: 500 Hz BW: 100 Hz | 100 km | 3~4 | 1 s |
| [19] | Fc: 400 Hz BW: 100 Hz | 300 km | 5 | 1 s |
| [20] | Fc: 500 Hz BW: 100 Hz | 600 km | 15~17 | 2 s |
| [21] | Fc: 500 Hz BW: 100 Hz | 1000 km | 5~8 | 1.5~2.5 s |
| Mod. Scheme and Sensor | Proposed | Proposed w.o. Ch.-Comb. | CV-CFM | TFSK |
|---|---|---|---|---|
| 1st Sensor | 0.0094 | 0.0113 | 0.0906 | 0.1394 |
| 2nd Sensor | 0.0030 | 0.0057 | 0.0830 | 0.1210 |
| 3rd Sensor | 0.0045 | 0.0099 | 0.0635 | 0.0890 |
| Avg. | 0.0056 | 0.0090 | 0.0790 | 0.1165 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahn, J.; Do, D.; Kim, W. The Long-Range Biomimetic Covert Communication Method Mimicking Large Whale. Sensors 2022, 22, 8011. https://doi.org/10.3390/s22208011
Ahn J, Do D, Kim W. The Long-Range Biomimetic Covert Communication Method Mimicking Large Whale. Sensors. 2022; 22(20):8011. https://doi.org/10.3390/s22208011
Chicago/Turabian StyleAhn, Jongmin, Deawon Do, and Wanjin Kim. 2022. "The Long-Range Biomimetic Covert Communication Method Mimicking Large Whale" Sensors 22, no. 20: 8011. https://doi.org/10.3390/s22208011
APA StyleAhn, J., Do, D., & Kim, W. (2022). The Long-Range Biomimetic Covert Communication Method Mimicking Large Whale. Sensors, 22(20), 8011. https://doi.org/10.3390/s22208011