
A Study on Millimeter Wave SAR Imaging for Non-Destructive Testing of Rebar in Reinforced Concrete


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory and Methodology
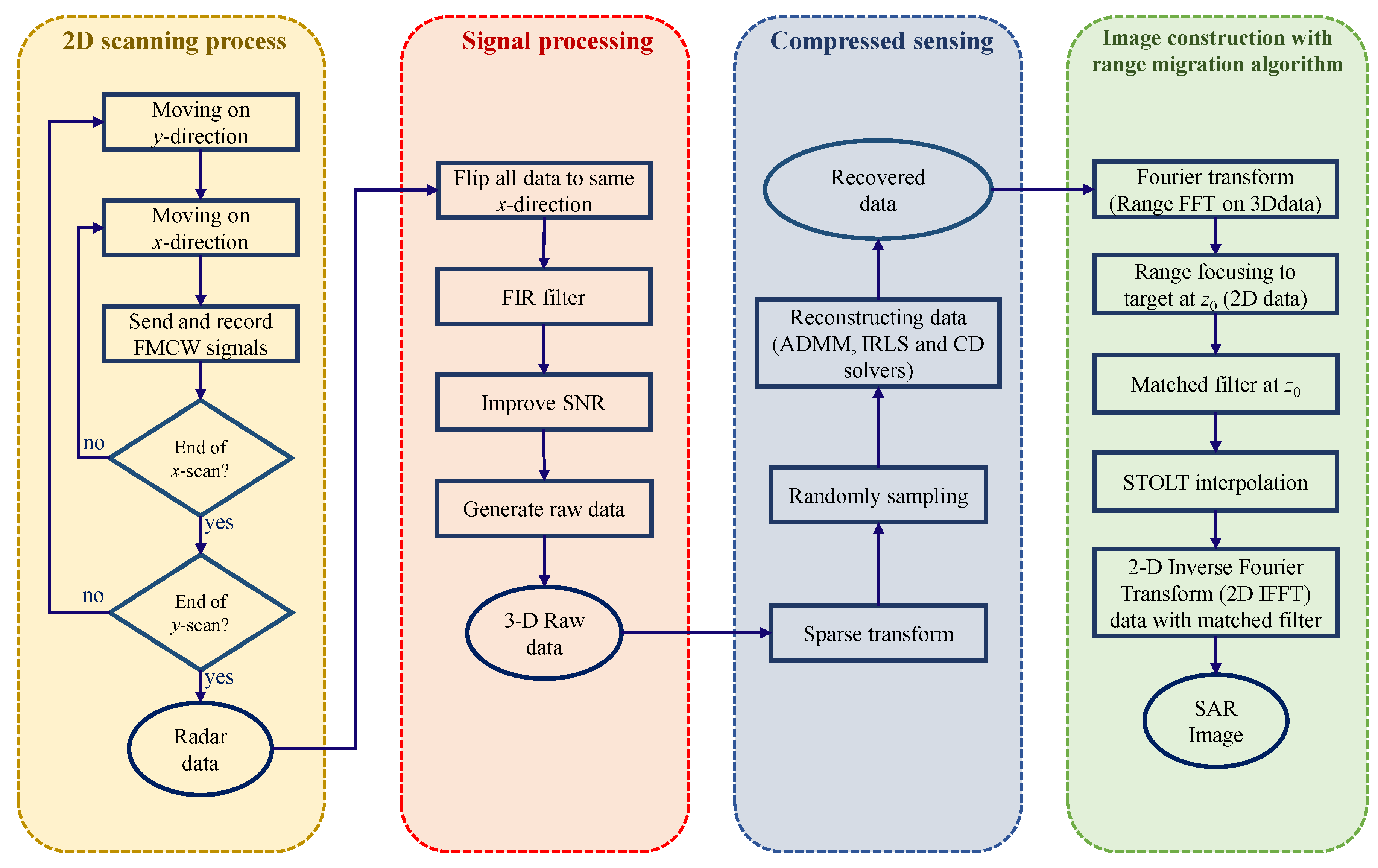
2.1. FMCW Signal and RMA Approach
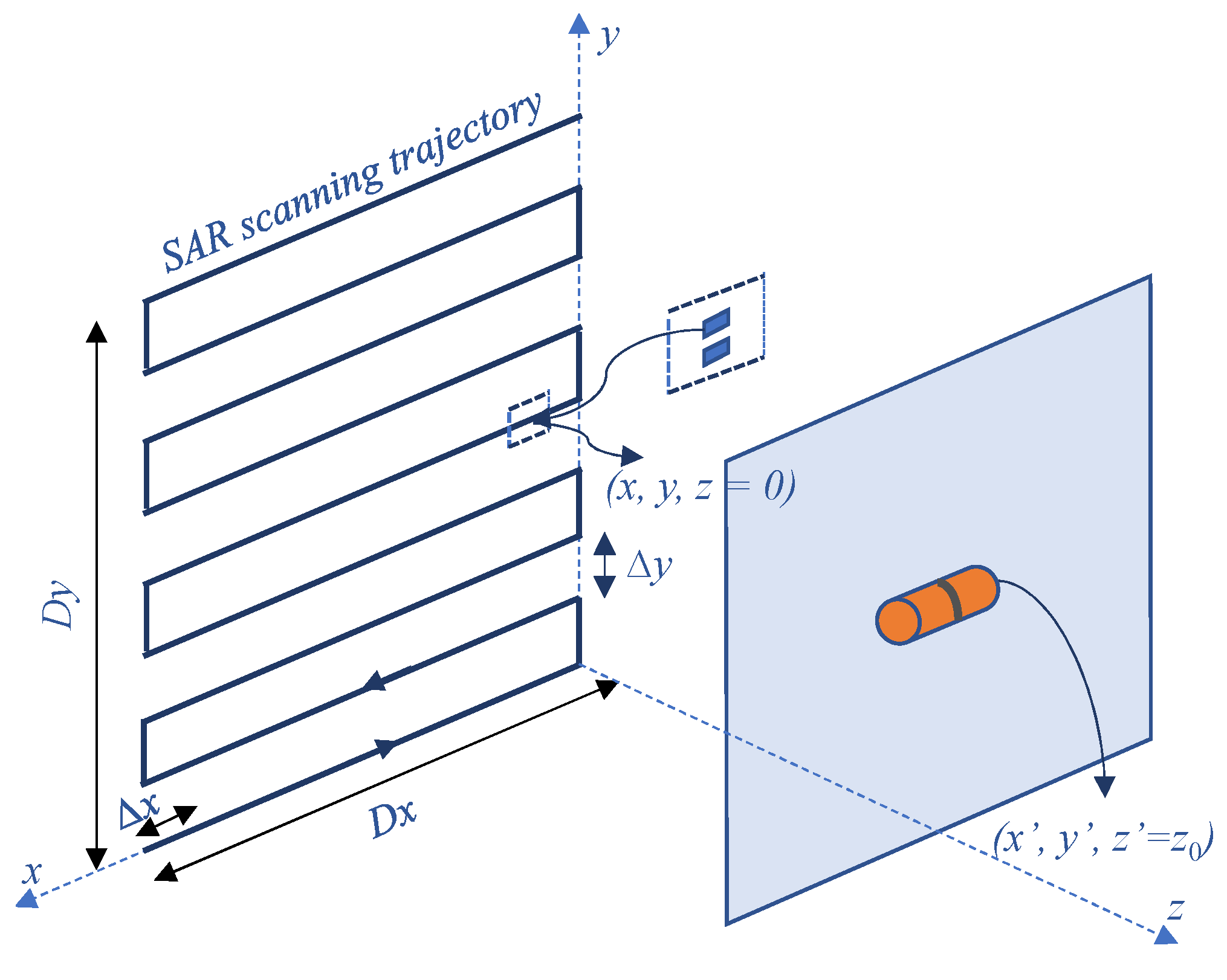
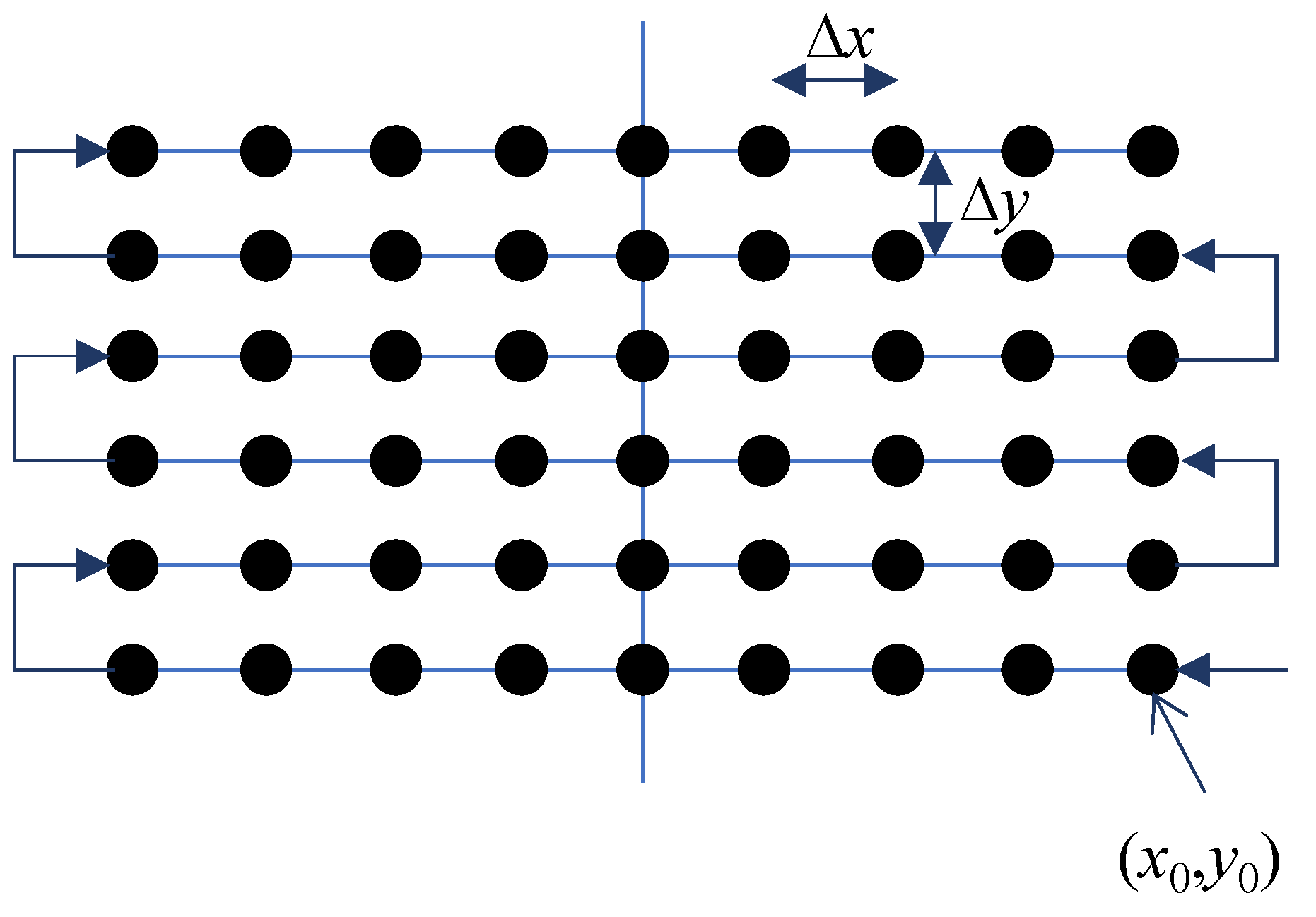
2.2. Data Collecting from 2-D Scanning System and RMA Involvement
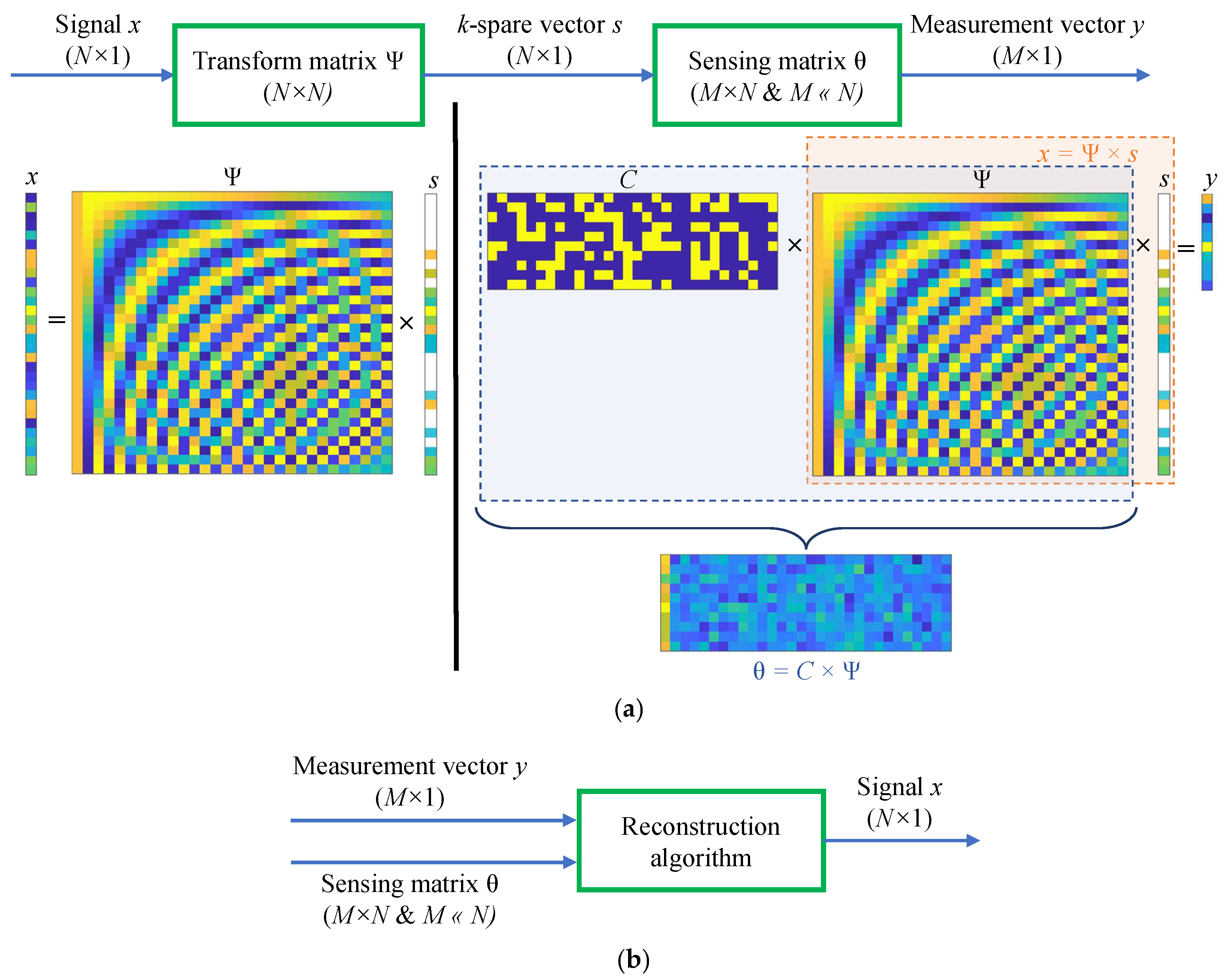
2.3. Compressed Sensing
2.3.1. CS Theory
2.3.2. SAR Imaging with Compressed Sensing
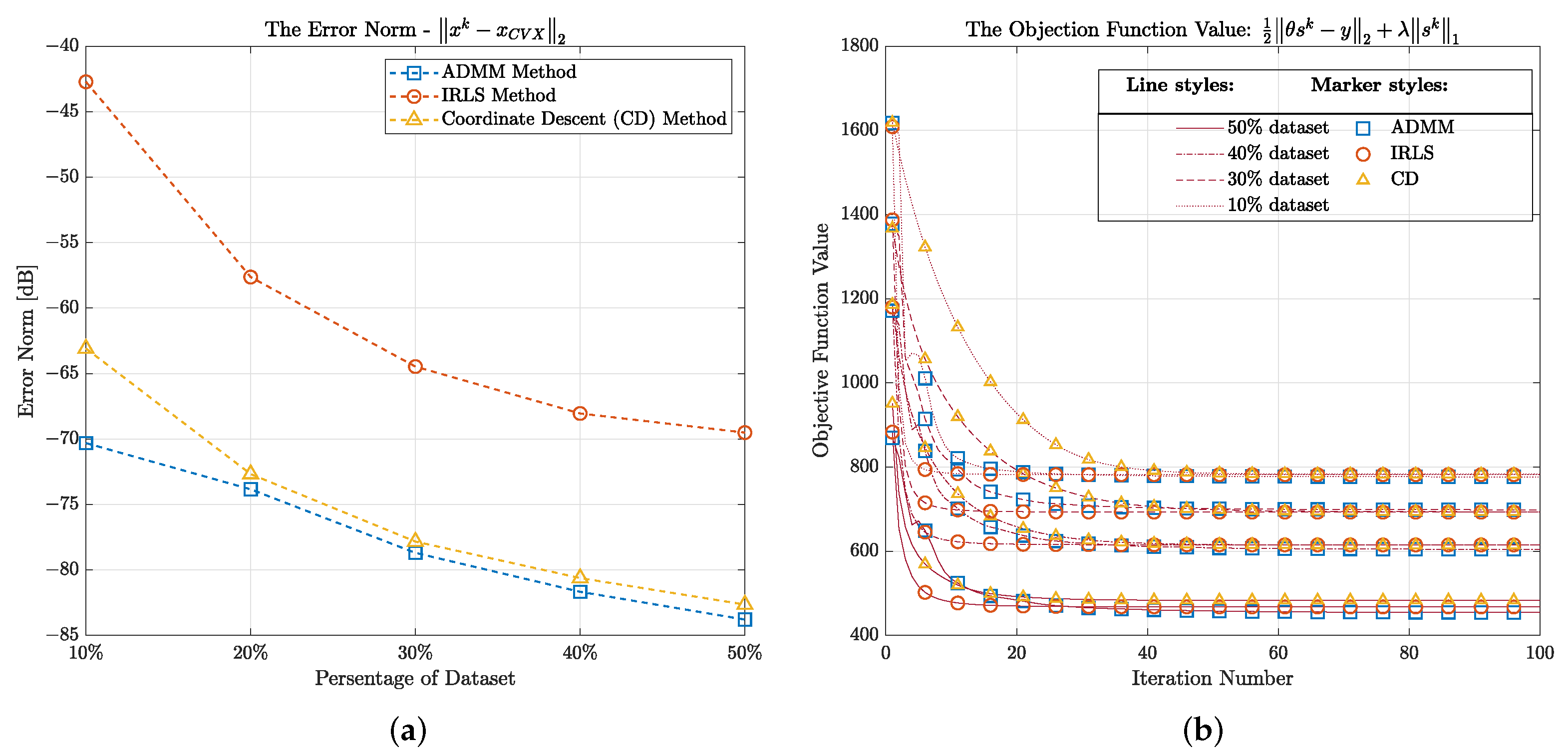
- The ADMM algorithm has been shown as a simple, effective, and fast convergent approach [40,41]. The optimization problem applied by the ADMM algorithm is given asThe regularization parameter (> 0) controls the balance between the data fidelity term and the regularization term . The update equations of ADMM over iteration for (19) are given bywhere is the iteration index in the algorithm, is the transpose of the matrix, I is the identify matrix, and is the parameter. The initial values of and are 0.
- In the IRLS method, the weight least square in each iteration is used to infer the next estimate with the weights derived from the last iteration. The optimization problem in each iteration is as follows: , , where W is the diagonal weight matrix. At the kth iteration, this matrix is computed from the solution of the current iteration , , . The closed form solution for can be inferred as .
- The coordinate descent method can be applied in multi-variable minimization by solving a sequence of scalar minimization sub-problems. By minimizing each sub-problem along a selected coordinate while all other coordinates are fixed, the estimate of the solution is improved [42].
3. Experiment Setup and Results
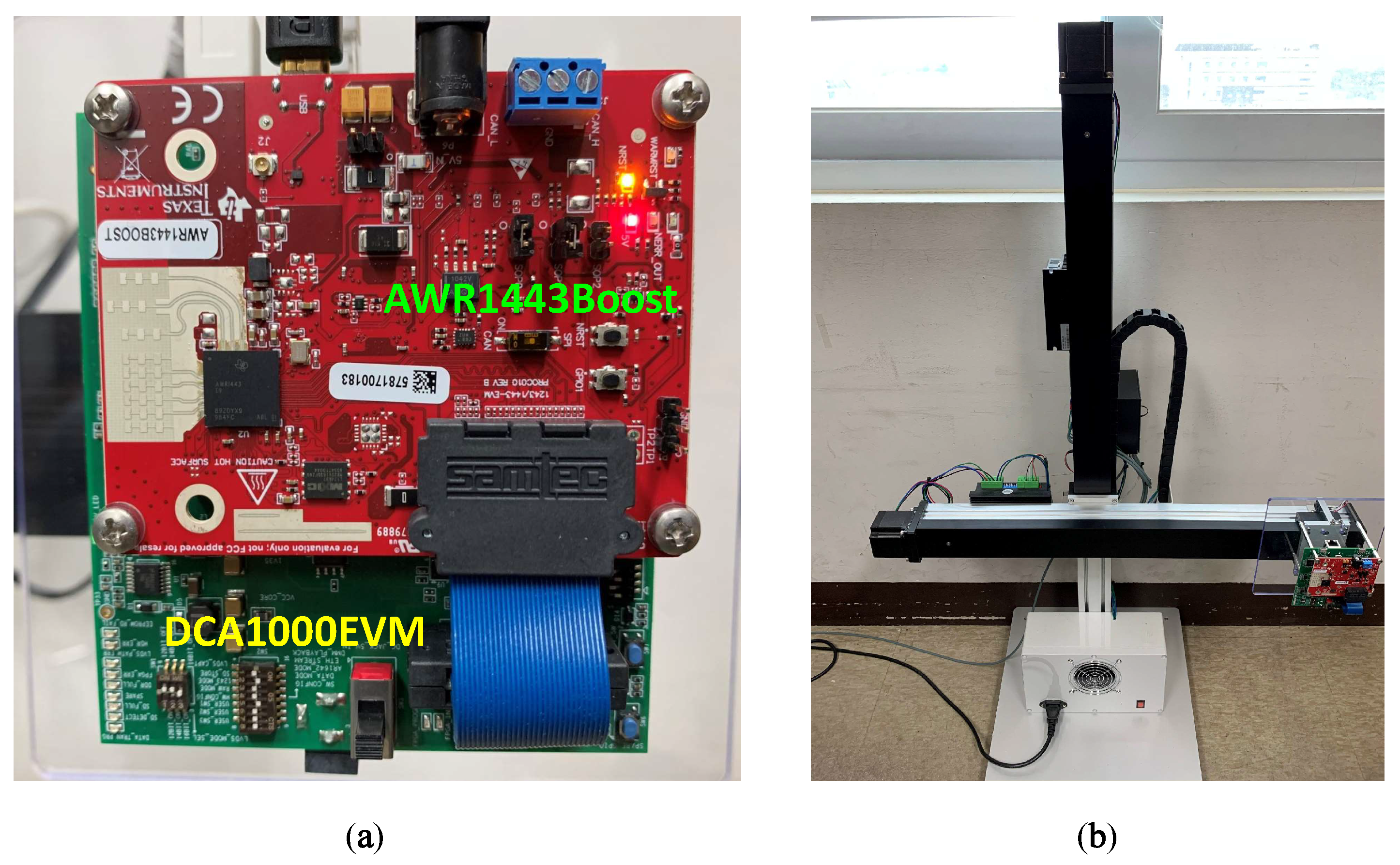
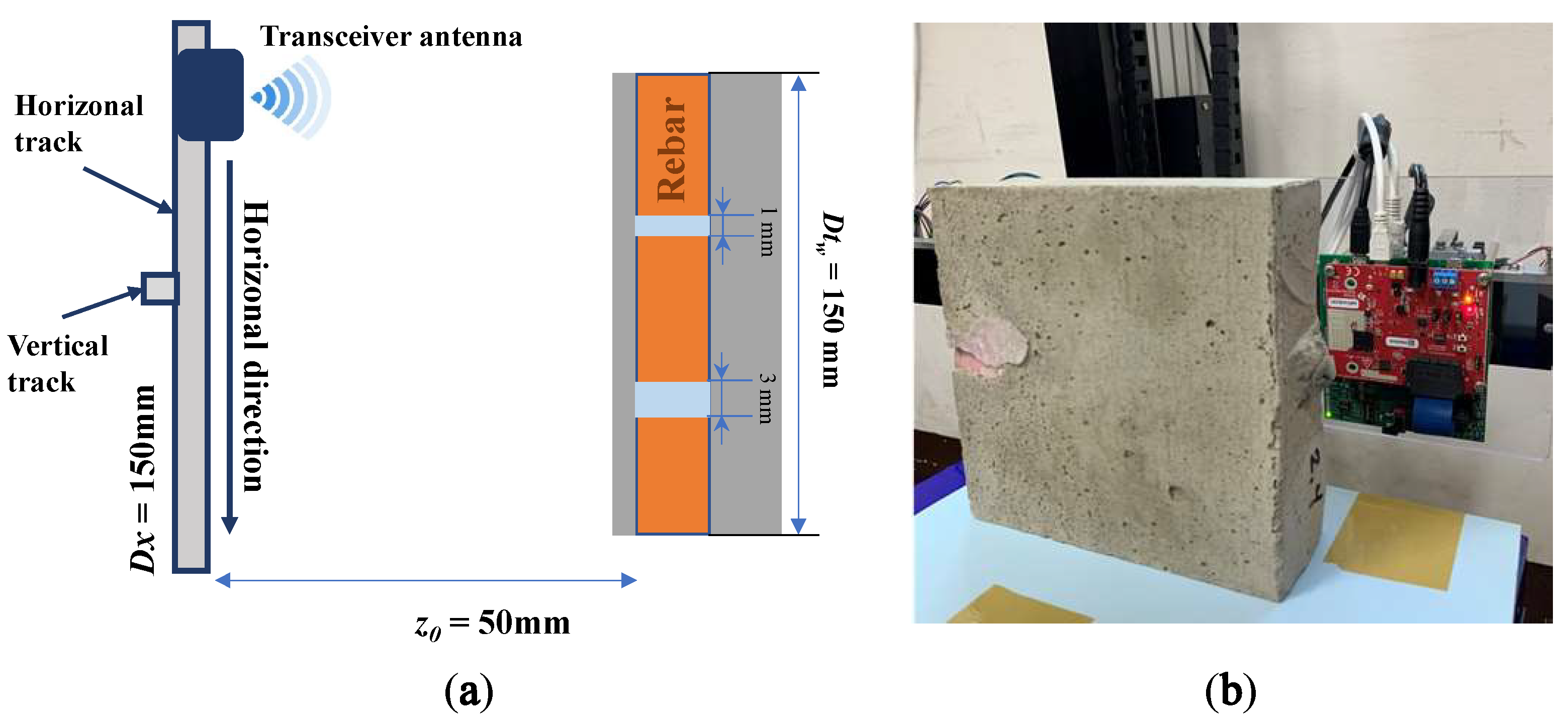
3.1. Experiment Setup
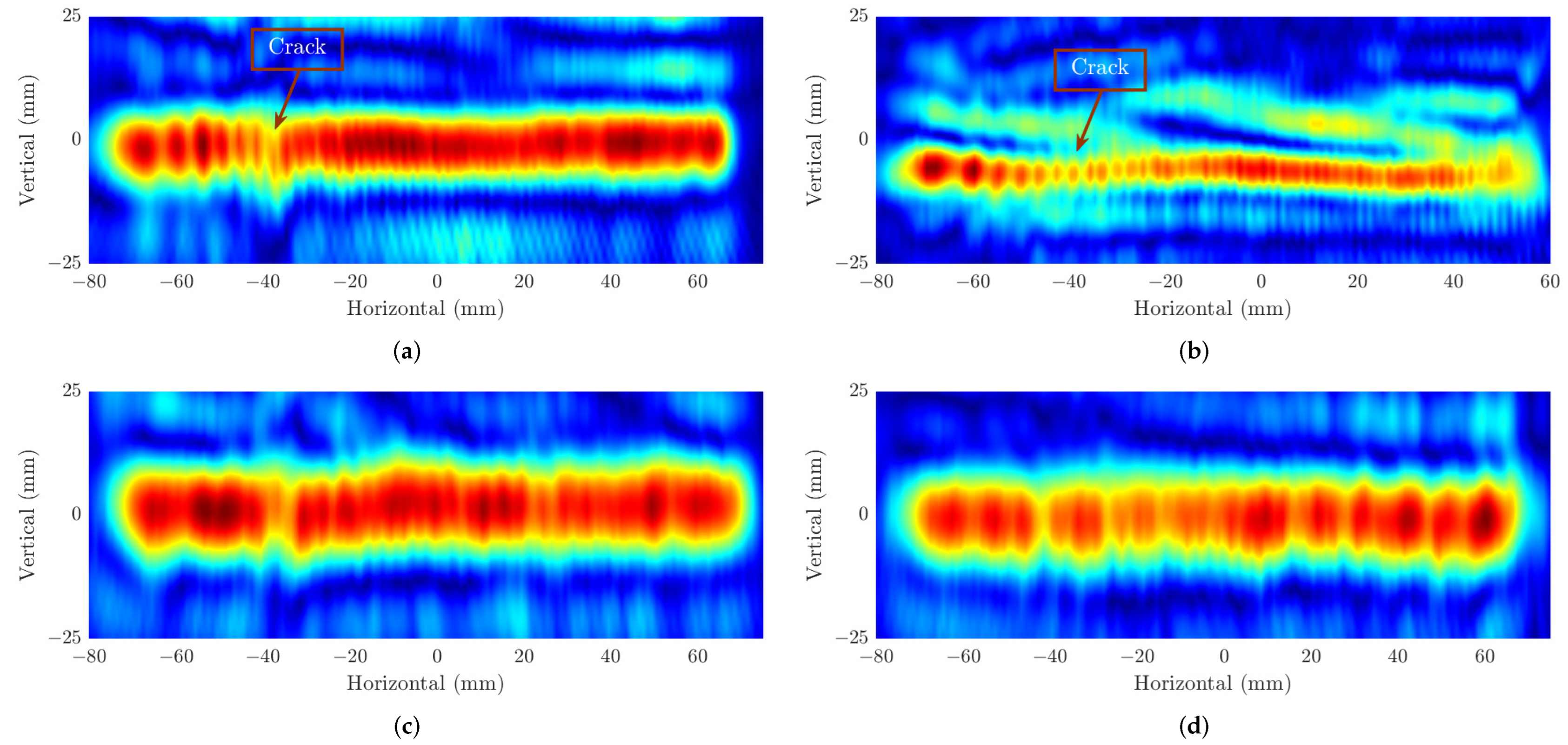
3.2. Experiment Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Runkiewicz, L. Application of non-destructive testing methods to assess properties of construction materials in building diagnostics. Archit. Civ. Eng. Environ. 2009, 2, 79–86. [Google Scholar]
- Einav, I. Non-Destructive Testing for Plant Life Assessment; International Atomic Energy Agency: Vienna, Austria, 2005; pp. 1–61. [Google Scholar]
- Ekinci, S.; Aksu, M.; Bingoeldag, M.; Dogruoez, M.; Kurtcebe, T.; Yildirim, A.; Saricam, S.; Yilmaz, N. Development of Protocols for Corrosion and Deposits Evaluation in Pipes by Radiography; IAEA-TECDOC-1445; International Atomic Energy Agency: Vienna, Austria, 2006. [Google Scholar]
- Haibo, L.; Yongqing, W.; Meng, L.; Tongyu, Z.; Baoliang, L. Thickness Measurement Using Ultrasonic Scanning Method for Large Aerospace Thin-Walled Parts. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Turin, Italy, 19–21 June 2019; pp. 243–247. [Google Scholar]
- Zhongzhu, L.; Chunguang, X.; Bolong, M. Application of SAGE Algorithm to Estimate Thin Layer Material’s Thickness in Ultrasonic NDE. In Proceedings of the 2011 International Conference on Electronic & Mechanical Engineering and Information Technology, Harbin, China, 12–14 August 2011; pp. 2869–2872. [Google Scholar]
- Yao, Y.; Tung, S.-T.; Glisic, B. Crack Detection and Characterization Techniques - An Overview. Struct. Control Health Monit. 2014, 21, 1387–1413. [Google Scholar] [CrossRef]
- Klepka, A.; Staszewski, W.J.; Jenal, R.B.; Szwedo, M.; Iwaniec, J.; Uhl, T. Nonlinear Acoustics for Fatigue Crack Detection Experimental Investigations of Vibro-acoustic Wave Modulations. Struct. Health Monit. 2012, 11, 197–211. [Google Scholar] [CrossRef]
- Bustillo, J.; Achdjian, H.; Arciniegas, A.; Blanc, L. Simultaneous determination of wave velocity and thickness on overlapped signals using Forward Backward algorithm. NDT&E Int. 2017, 86, 100–105. [Google Scholar]
- Bertovic, M.; Gaal, M.; Müller, C.; Fahlbruch, B. Investigating human factors in manual ultrasonic testing: Testing the human factors model. Insight Non-Destr. Test. Cond. Monit. 2011, 53, 673–676. [Google Scholar] [CrossRef]
- Galin, N.; Worby, A.; Markus, T.; Leuschen, C.; Gogineni, P. Validation of Airborne FMCW Radar Measurements of Snow Thickness Over Sea Ice in Antarctica. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3–12. [Google Scholar]
- Iglesias, R.; Aguasca, A.; Fabregas, X.; Mallorqui, J.J.; Monells, D.; Lpez-Martnez, C.; Pipia, L. Ground-Based Polarimetric SAR Interferometry for the Monitoring of Terrain Displacement Phenomena; Part II: Applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 994–1007. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Song, H.; Wang, R.; Deng, Y.; Zhao, F.; Xu, Z. Arc FMCW SAR and Applications in Ground Monitoring. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5989–5998. [Google Scholar] [CrossRef]
- Charvat, G.L.; Kempell, L.C.; Coleman, C. A Low-Power High-Sensitivity X-Band Rail SAR Imaging System. IEEE Antennas Propag. Mag. 2008, 50, 108–115. [Google Scholar] [CrossRef]
- Wang, G.; Gu, C.; Inoue, T.; Li, C. A Hybrid FMCW-Interferometry Radar for Indoor Precise Positioning and Versatile Life Activity Monitoring. IEEE Trans. Microw. Theory Tech. 2014, 62, 2812–2822. [Google Scholar] [CrossRef]
- Boukari, B.; Moldovan, E.; Affes, S.; Wu, K.; Bosisio, R.G.; Tatu, S.O. Six-Port FMCW Collision Avoidance Radar Sensor Configurations. In Proceedings of the 2008 Canadian Conference on Electrical and Computer Engineering, Niagara Falls, ON, Canada, 4–7 May 2008; pp. 305–308. [Google Scholar]
- Polychronopoulos, A.; Amditis, A.; Floudas, N.; Lind, H. Integrated object and road borders tracking using 77GHz automotive radars. IEE Proc. Radar Sonar Navig. 2004, 151, 375–381. [Google Scholar] [CrossRef]
- Russell, M.E.; Crain, A.; Curran, A.; Campbell, R.A.; Drubin, C.A.; Miccioli, W.F. Millimeter-Wave Radar Sensor for Automotive Intelligent Cruise Control (ICC). IEEE Trans. Microw. Theory Tech. 1997, 45, 2444–2453. [Google Scholar] [CrossRef]
- Ann, F.; Peter, L.; Luc, T. 2-D Near-field SAR Non-destructive Testing of Rebars in a Concrete Wall. Int. J. Appl. Electromagn. Mech. 2004, 19, 333–338. [Google Scholar]
- Sato, M.; Takahashi, K.; Iitsuka, Y.; Koyama, C.N. Near range polarimetric SAR for non-destructive inspection of wooden buildings. In Proceedings of the IEEE 5th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Singapore, 1–4 September 2015; pp. 306–309. [Google Scholar]
- Lsaadouny, M.E.; Barowski, J.; Jebramcik, J.; Rolfes, I. Millimeter Wave SAR Imaging for the Non-Destructive Testing of 3D-printed Samples. In Proceedings of the 2019 International Conference on Electromagnetics in Advanced Applications (ICEAA), Granada, Spain, 24 October 2019; pp. 1283–1285. [Google Scholar]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.K.; Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Commun. Pure Appl. Math. 2006, 59, 1207–1223. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Xi, X.; Pu, Y.; Zheng, C.; Wu, D. Compressive sensing for through-wall imaging with spread spectrum radar. In Proceedings of the 2016 IEEE MTT-S International Wireless Symposium (IWS), Shanghai, China, 14–16 March 2016; pp. 1–4. [Google Scholar]
- Kazemi, P.; Modarres-Hashemi, M.; Naghsh, M.M. Block compressive sensing in Synthetic Aperture Radar (SAR). In Proceedings of the 2016 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016; pp. 1324–1329. [Google Scholar]
- Yang, C.; Zhan, Q.; Liu, H.; Ma, R. An IHS-Based Pan-Sharpening Method for Spectral Fidelity Improvement Using Ripplet Transform and Compressed Sensing. Sensors 2018, 18, 3624. [Google Scholar] [CrossRef] [Green Version]
- Jung, D.-H.; Kang, H.-S.; Kim, C.-K.; Park, J.; Park, S.-O. Sparse Scene Recovery for High-Resolution Automobile FMCW SAR via Scaled Compressed Sensing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10136–10146. [Google Scholar] [CrossRef]
- Phippen, D.; Daniel, L.; Hoare, E.; Cherniakov, M.; Gashinova, M. Compressive sensing for automotive 300GHz 3D imaging radar. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Lee, S.; Jung, Y.; Lee, M.; Lee, W. Compressive Sensing-Based SAR Image Reconstruction from Sparse Radar Sensor Data Acquisition in Automotive FMCW Radar System. Sensors 2021, 21, 7283. [Google Scholar] [CrossRef]
- Candés, E.; Romberg, J. L1-Magic: Recovery of Sparse Signals via Convex Programming; Caltech: Pasadena, CA, USA, 2005; pp. 1–19. [Google Scholar]
- Yanik, M.E.; Torlak, M. Near-field MIMO-SAR millimeter-wave imaging with sparsely sampled aperture data. IEEE Access. 2019, 7, 31801–31819. [Google Scholar] [CrossRef]
- Kim, H.; You, S.; Jeong, B.J.; Byun, W. Azimuth Angle Resolution Improvement Technique with Neural Network. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 21–23 October 2020; pp. 1384–1387. [Google Scholar]
- Li, J.; Stoica, P. MIMO Radar Signal Processing, 1st ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2008. [Google Scholar]
- Wang, G.; Munoz-Ferreras, J.-M.; Gu, C.; Li, C.; Gomez-Garcia, R. Application of linear-frequency-modulated continuous-wave (LFMCW) radars for tracking of vital signs. IEEE Trans. Microw. Theory Tech. 2014, 62, 1387–1399. [Google Scholar] [CrossRef]
- Silverstein, S.D.; Zheng, Y. Near-field inverse coherent imaging problems: Solutions, simulations, and applications. In Proceedings of the Thrity-Seventh Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 9–12 November 2003; pp. 1193–1197. [Google Scholar]
- Brekhovskikh, L.M.; Godin, O. Acoustics of Layered Media II: Point Sources and Bounded Beams; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Yanik, M.E.; Torlak, M. Near-Field 2-D SAR Imaging by Millimeter-Wave Radar for Concealed Item Detection. In Proceedings of the 2019 IEEE Radio and Wireless Symposium (RWS), Orlando, FL, USA, 20–23 January 2019; pp. 1–4. [Google Scholar]
- Stephen, L.; Bruton, J.; Nathan, K. Data Driven Science & Engineering; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Candes, E.J.; Romberg, J.; Tao, T. Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2004, 52, 489–509. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Jiao, S.; Xu, X.; Wang, L. Compressed sensing and reconstruction with Bernoulli matrices. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 455–460. [Google Scholar]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers; Now Foundations and Trends: Norwell, MA, USA, 2011; pp. 1–122. [Google Scholar]
- Liu, H.; Song, B.; Qin, H.; Qiu, Z. An adaptive-ADMM algorithm with support and signal value detection for compressed sensing. IEEE Signal Process. Lett. 2013, 20, 315–318. [Google Scholar] [CrossRef]
- Li, Y.; Osher, S. Coordinate descent optimization for l 1 minimization with application to compressed sensing; a greedy algorithm. Inverse Probl. Imaging 2009, 3, 487–503. [Google Scholar] [CrossRef]
- mmWave Radar Sensors|TI.com. 2022. Available online: http://www.ti.com/sensors/mmwave/overview.html (accessed on 1 May 2022).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, T.-H.; Kim, K.-H.; Hong, I.-P. A Study on Millimeter Wave SAR Imaging for Non-Destructive Testing of Rebar in Reinforced Concrete. Sensors 2022, 22, 8030. https://doi.org/10.3390/s22208030
Pham T-H, Kim K-H, Hong I-P. A Study on Millimeter Wave SAR Imaging for Non-Destructive Testing of Rebar in Reinforced Concrete. Sensors. 2022; 22(20):8030. https://doi.org/10.3390/s22208030
Chicago/Turabian StylePham, The-Hien, Kil-Hee Kim, and Ic-Pyo Hong. 2022. "A Study on Millimeter Wave SAR Imaging for Non-Destructive Testing of Rebar in Reinforced Concrete" Sensors 22, no. 20: 8030. https://doi.org/10.3390/s22208030