
Performance Improvement of a Vehicle Equipped with Active Aerodynamic Surfaces Using Anti-Jerk Preview Control Strategy



Abstract
:1. Introduction
- A comprehensive case study for the control of half-car model equipped with active aerodynamics surfaces is presented.
- We consider an anticipation of future values of deterministically known road disturbances in the design problem.
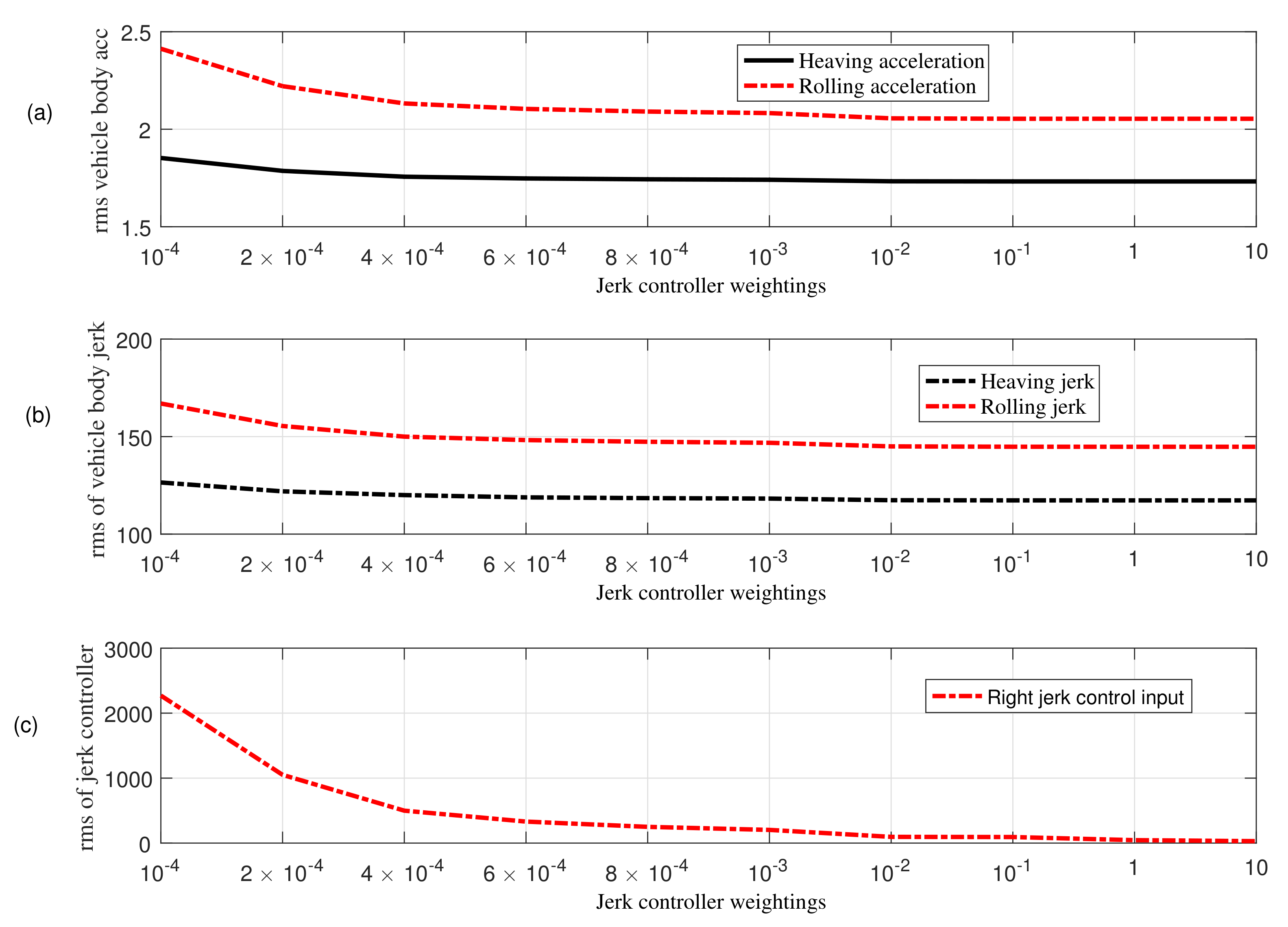
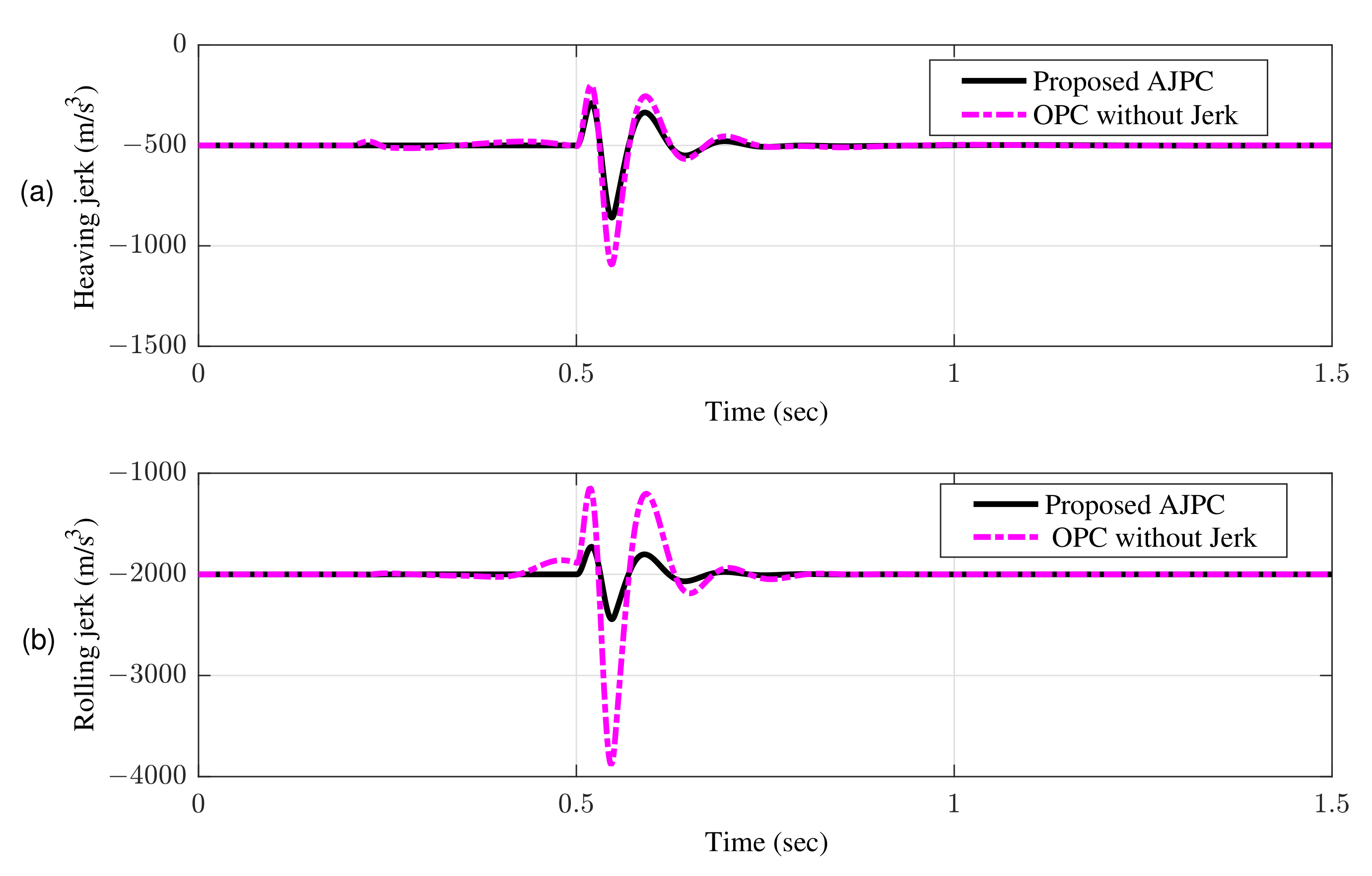
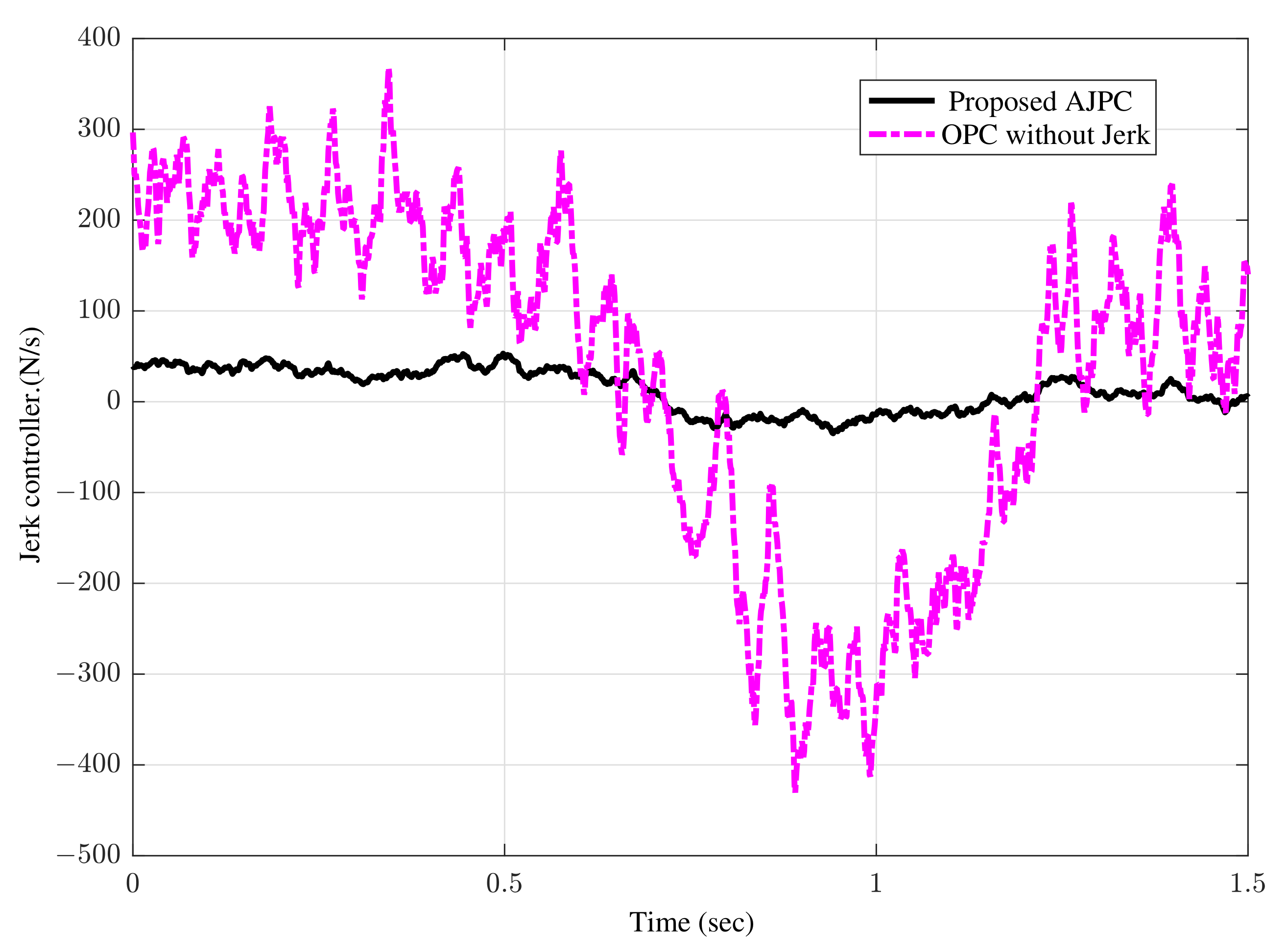
- To reduce the effect of jerk related to the ride comfort of a vehicle, a weighted norm of jerk control input is included in the pre-specified performance index. The minimization of the performance index accounts for improvisation of ride comfort and road holding capability.
- The feed-forward controller is designed based on the formulation for the preview control subjected to oncoming measured road disturbances.
- Simulations were carried using MATLAB that demonstrates the effectiveness of the proposed scheme in terms of minimizing control jerk, and assuring ride comfort and road holding capabilities. It was also demonstrated that the designed control algorithm has a proclivity to anticipate future measured disturbances and to take remedial action accordingly ahead of the occurrence of disturbances.
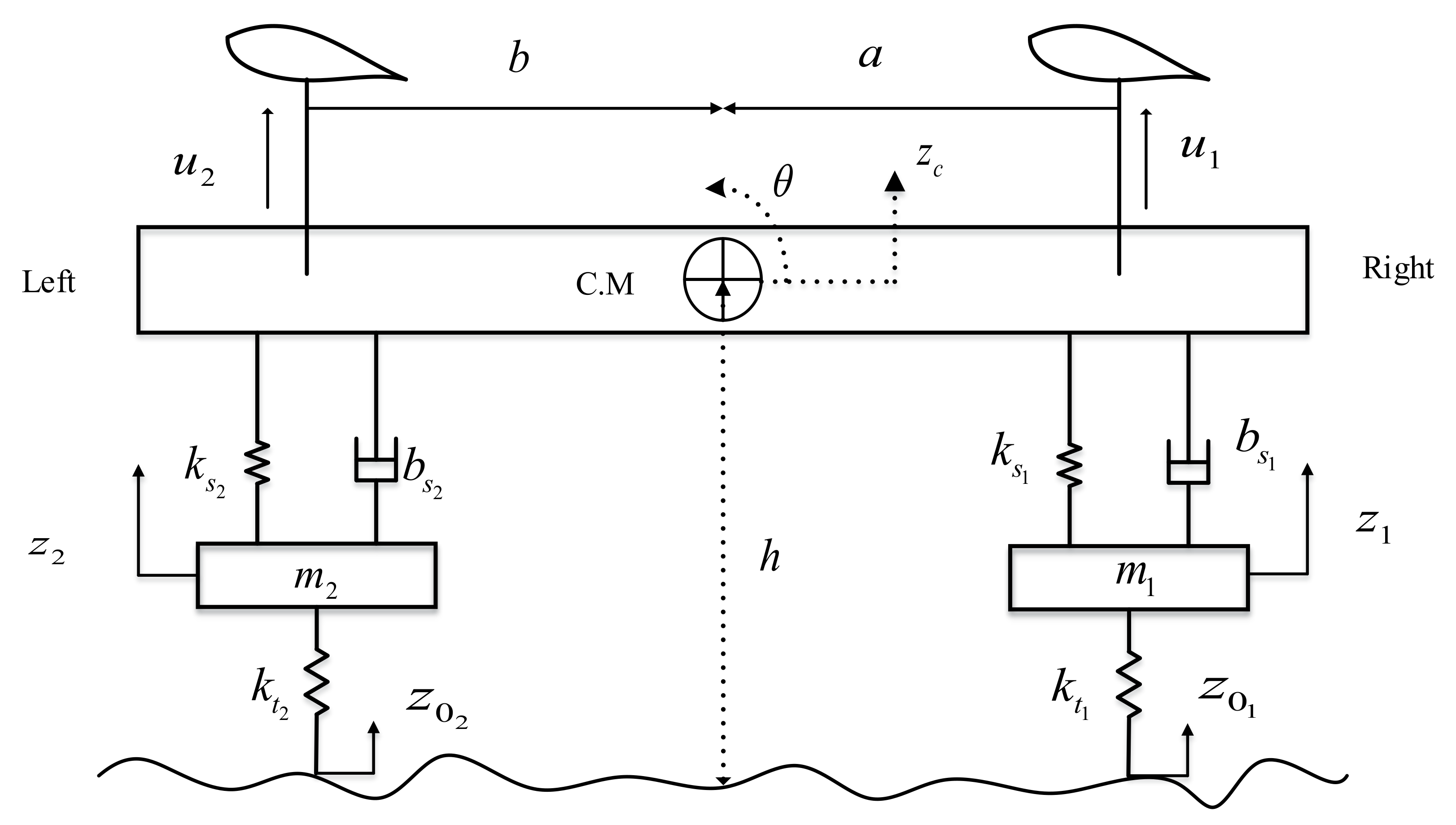
2. Mathematical Modeling of Vehicle
2.1. Aerodynamic Forces
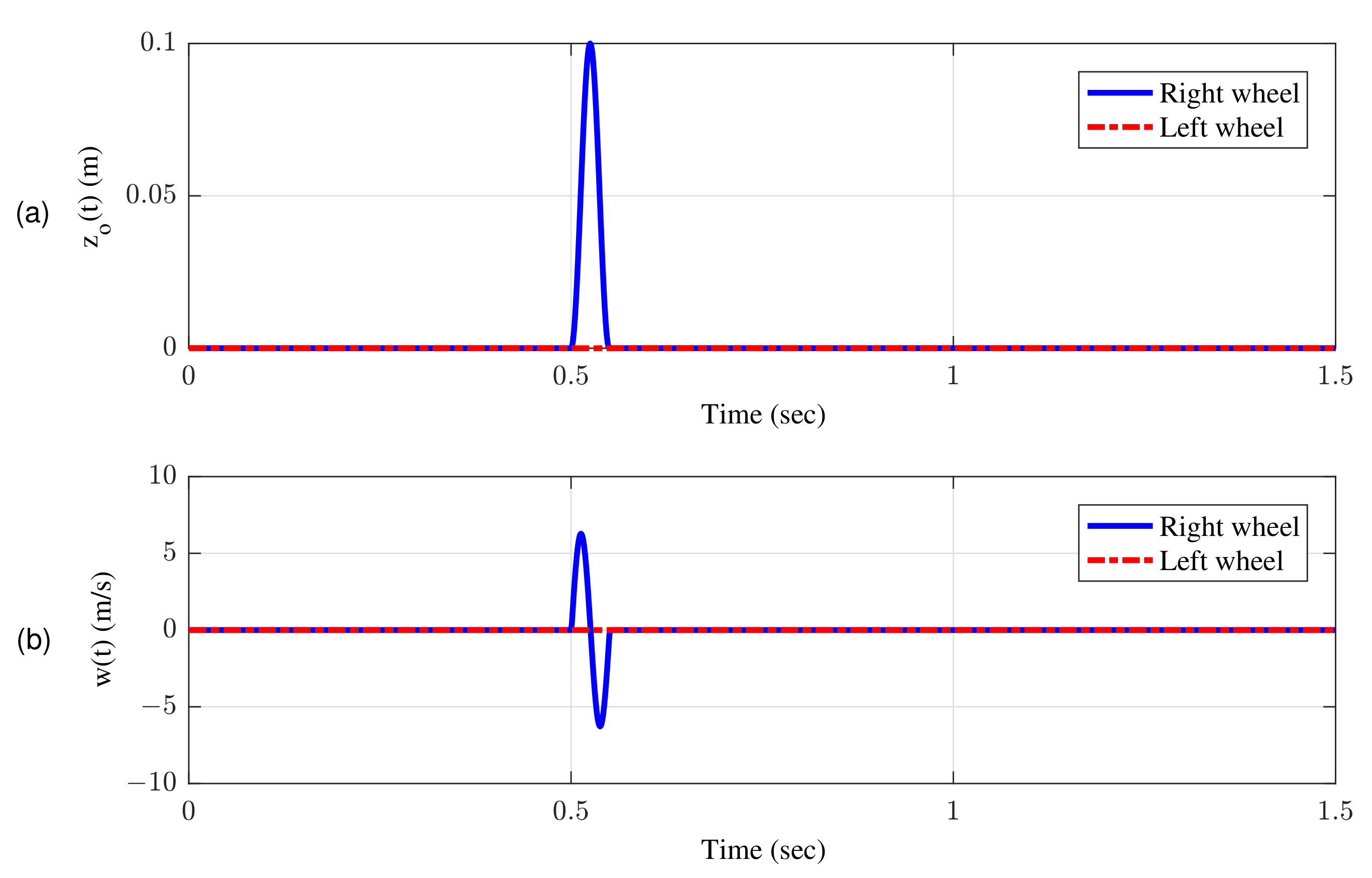
Road Excitation Model
3. Problem Formulation
3.1. System Description
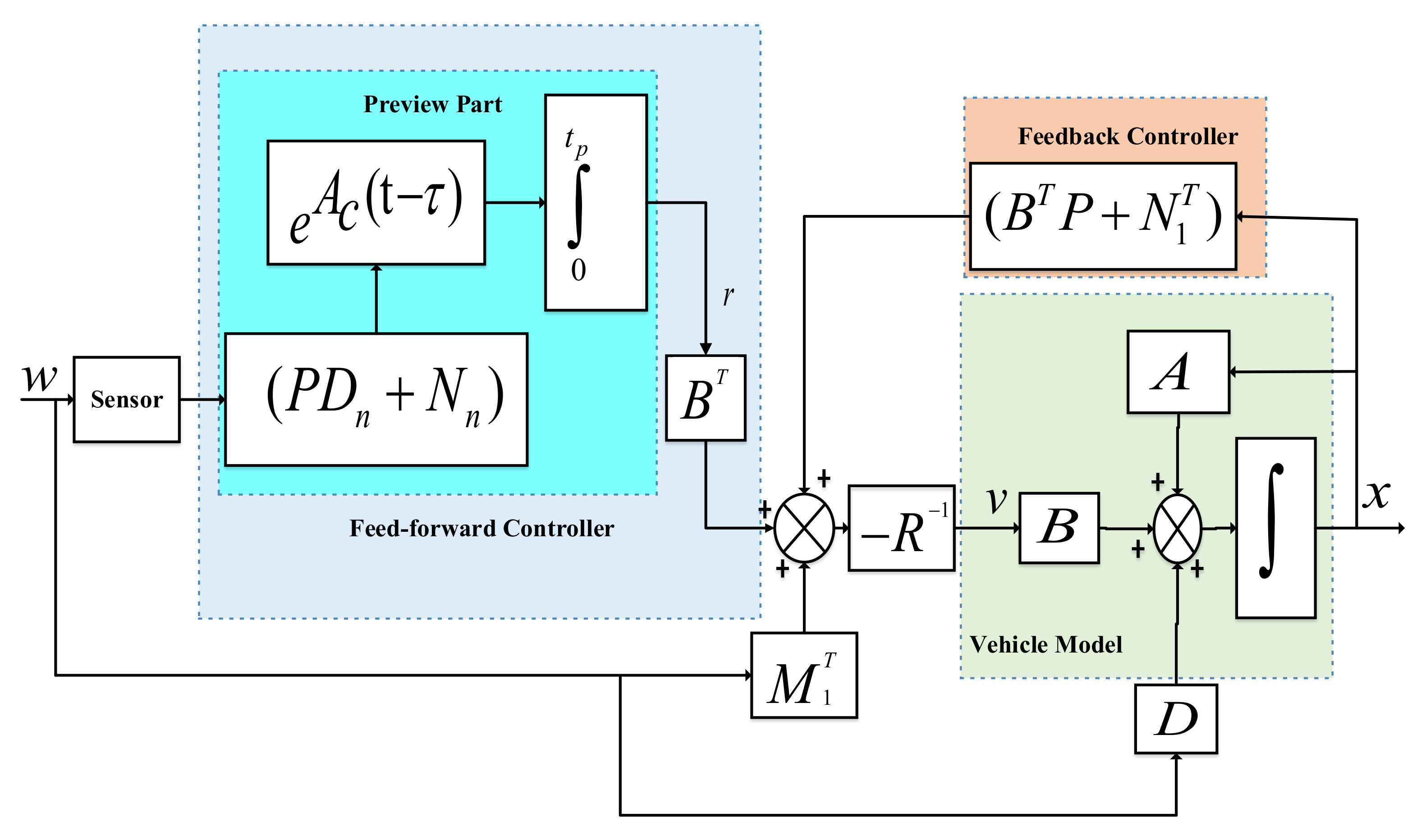
3.2. Controller
4. Optimal Based Anti-Jerk Preview Control
5. Simulation Results and Discussion
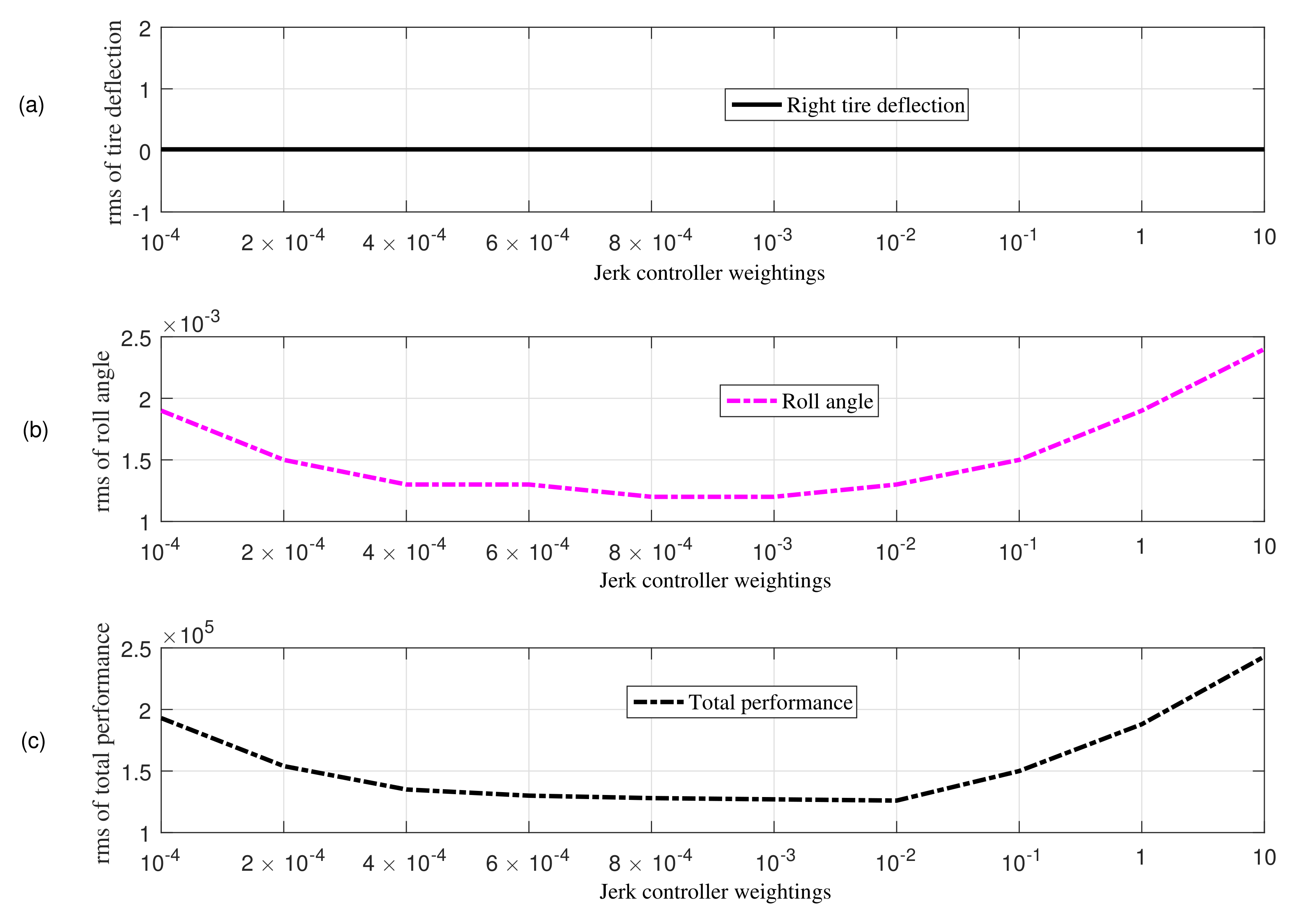
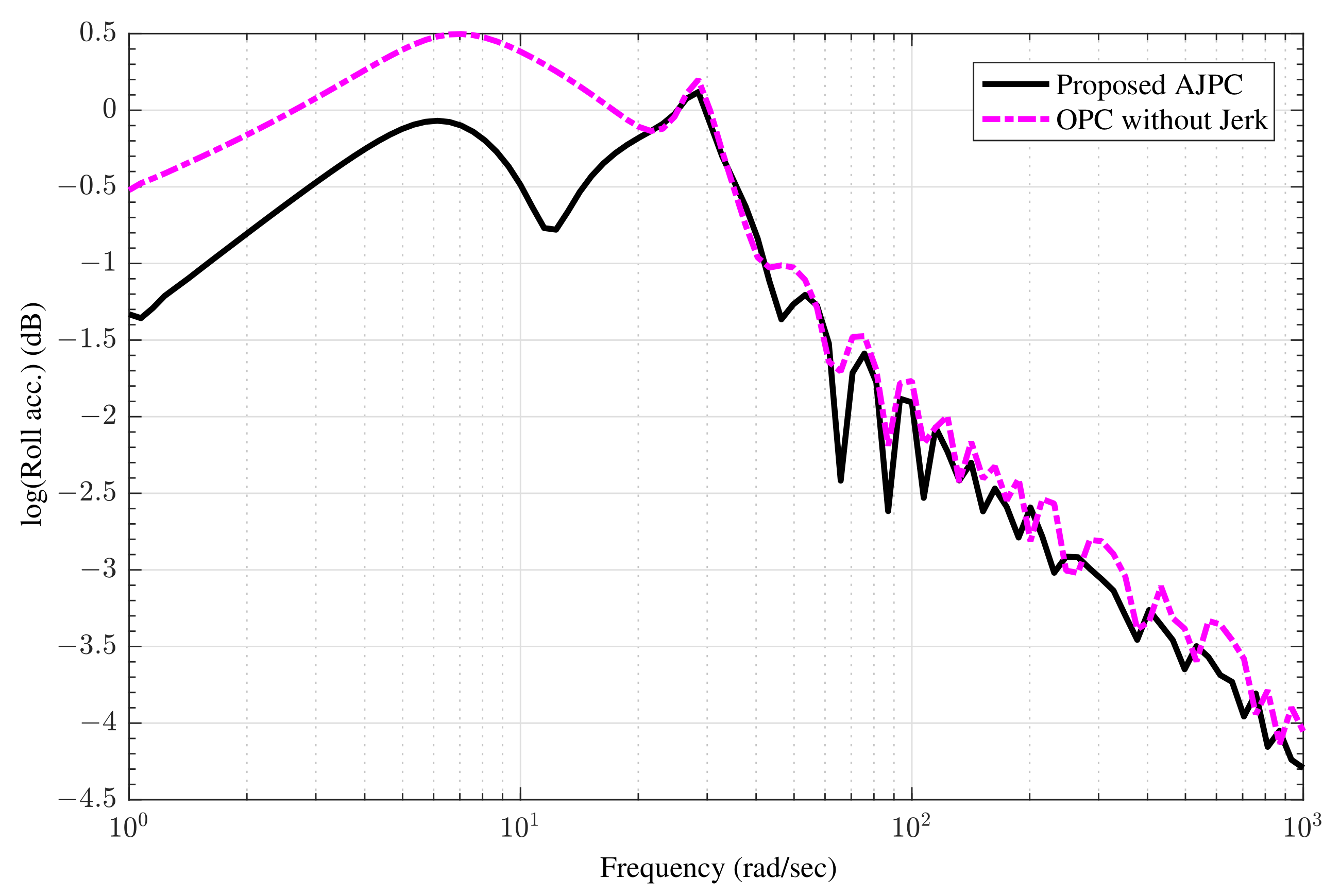
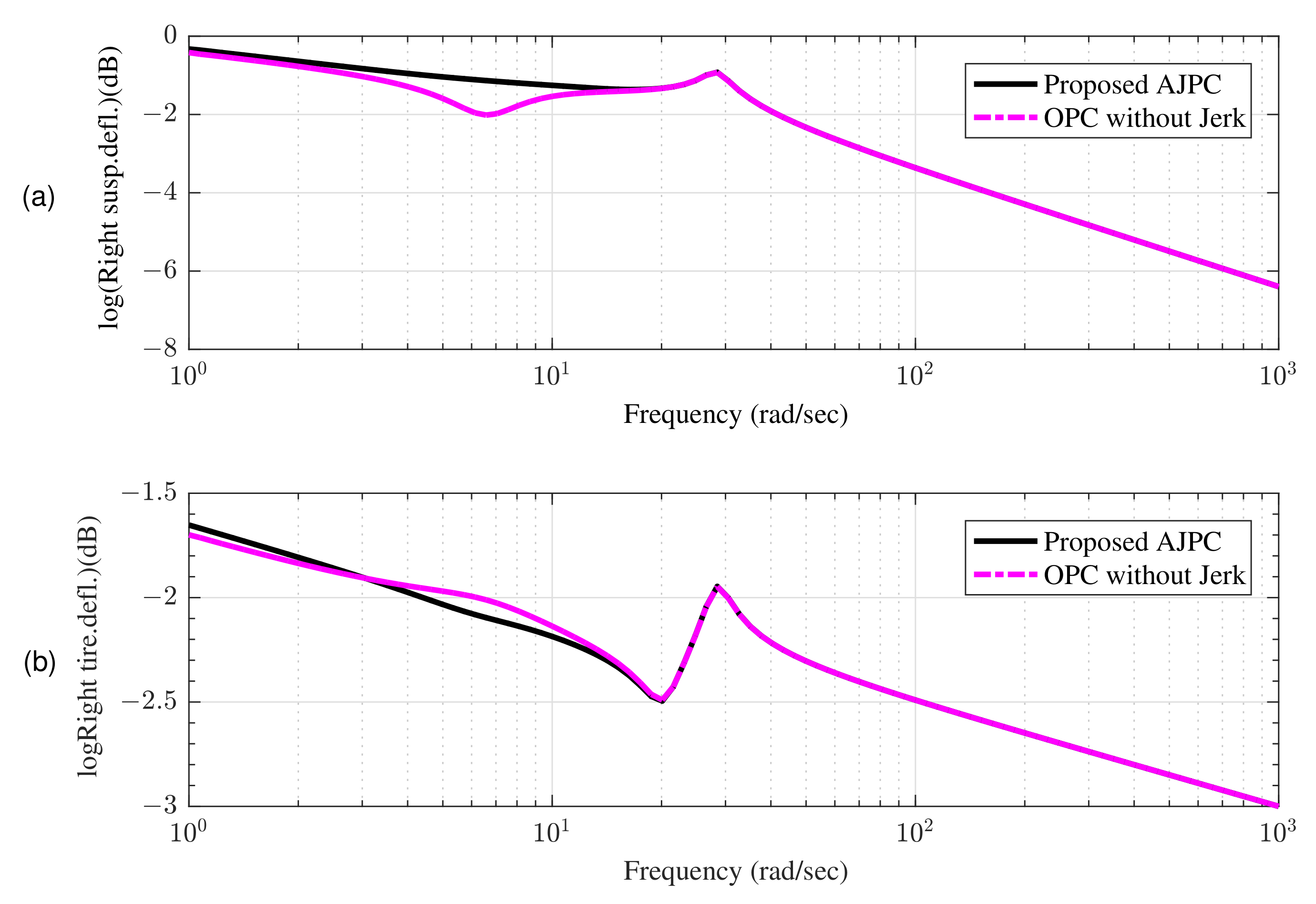
5.1. Frequency Domain Characteristics
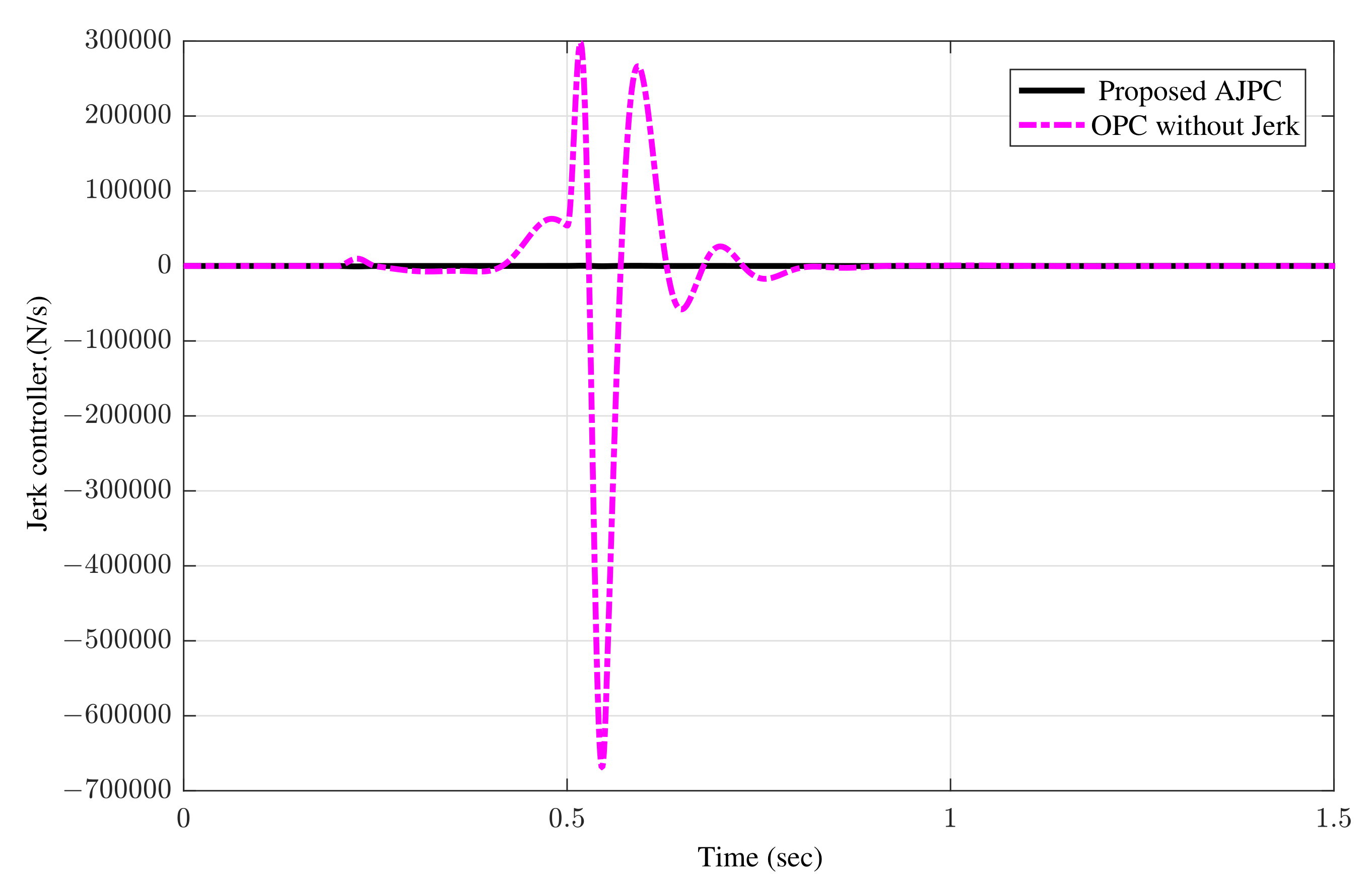
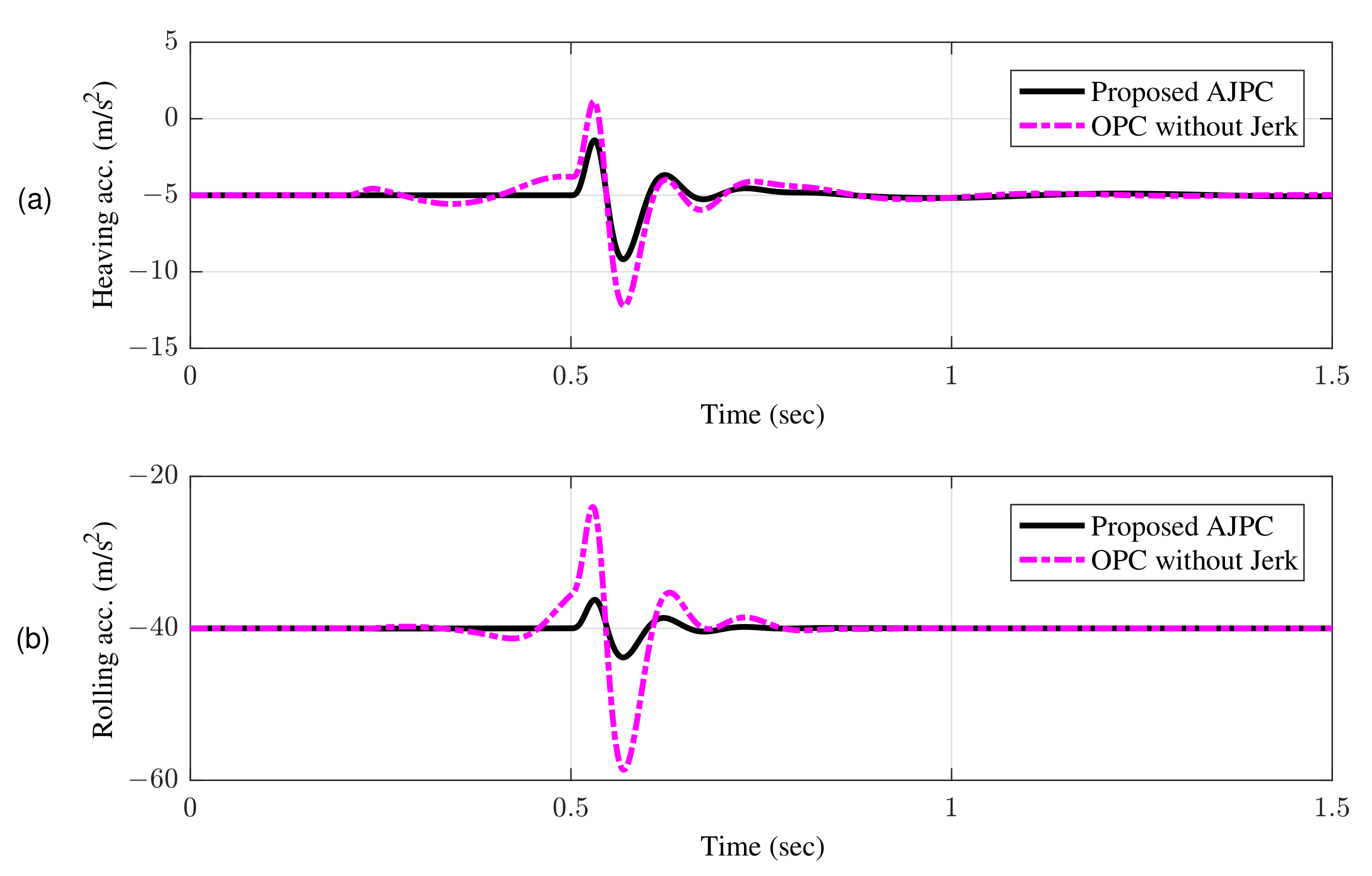
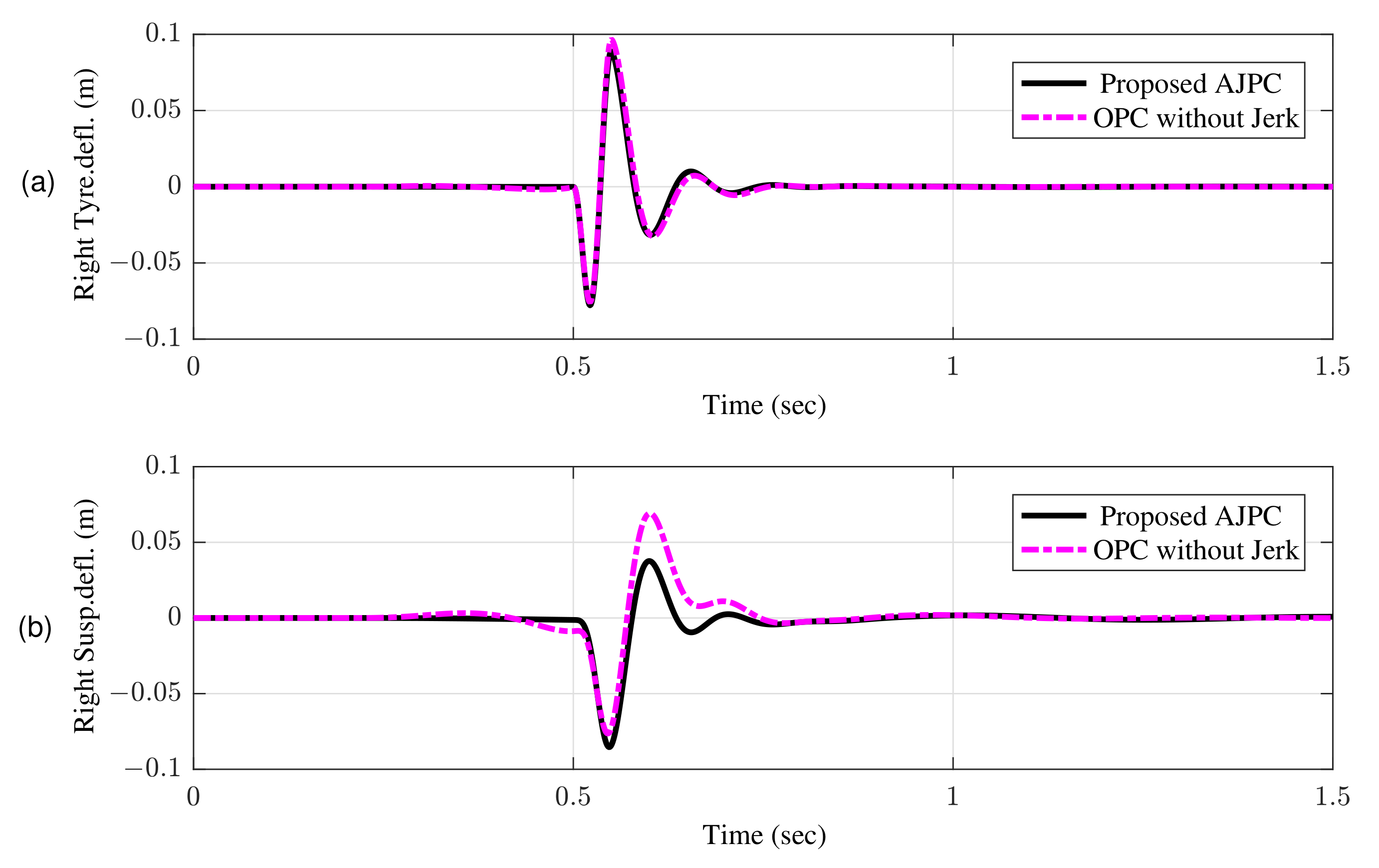
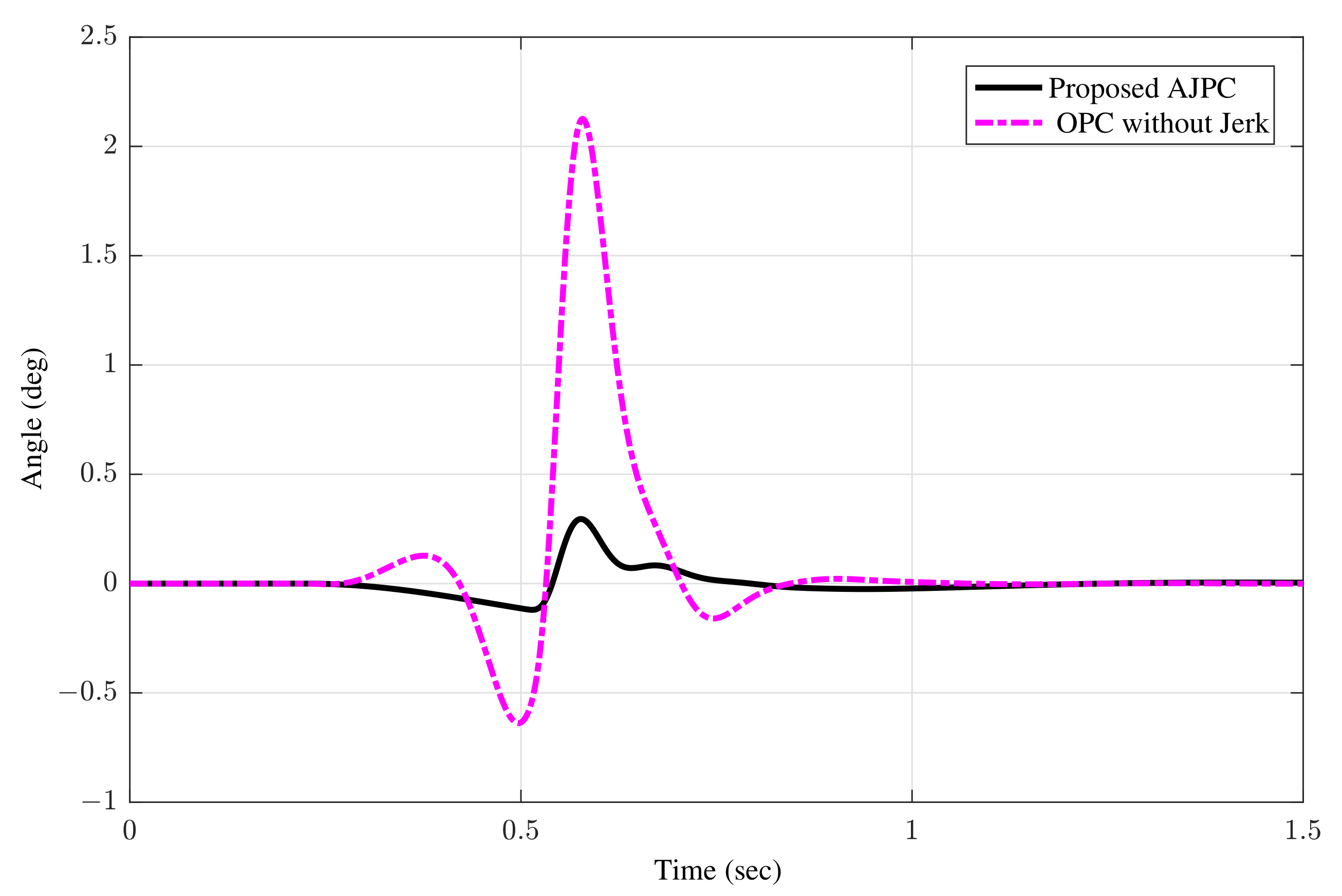
5.2. Time Domain Characteristics
6. Conclusions
- The proposed control strategy can be investigated considering the actual model of active aerodynamic surfaces with experimental implementations or with some commercial software such as CarSim or CarMaker.
- More advanced robust, and intelligent control algorithms can be considered in the future to tackle both road as well as air disturbances.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Yatak, M.Ö.; Şahin, F. Ride comfort-road holding trade-off improvement of full vehicle active suspension system by interval type-2 fuzzy control. Eng. Sci. Technol. Int. J. 2021, 24, 259–270. [Google Scholar] [CrossRef]
- He, D.; He, W.; Song, X. Efficient predictive cruise control of autonomous vehicles with improving ride comfort and safety. Meas. Control 2020, 53, 18–28. [Google Scholar] [CrossRef] [Green Version]
- Cvok, I.; Hrgetić, M.; Hoić, M.; Deur, J.; Ivanovic, V. Design of a linear motor-based shaker rig for testing driver’s perceived ride comfort. Mechatronics 2021, 75, 102521. [Google Scholar] [CrossRef]
- Mata-Carballeira, Ó.; del Campo, I.; Asua, E. An eco-driving approach for ride comfort improvement. IET Intell. Transp. Syst. 2022, 16, 186–205. [Google Scholar] [CrossRef]
- Tang, X.; Duan, Z.; Hu, X.; Pu, H.; Cao, D.; Lin, X. Improving Ride Comfort and Fuel Economy of Connected Hybrid Electric Vehicles Based on Traffic Signals and Real Road Information. IEEE Trans. Veh. Technol. 2021, 70, 3101–3112. [Google Scholar] [CrossRef]
- Sadeghi, J.; Rabiee, S.; Khajehdezfuly, A. Effect of Rail Irregularities on Ride Comfort of Train Moving Over Ballast-Less Tracks. Int. J. Struct. Stab. Dyn. 2019, 19, 1950060. [Google Scholar] [CrossRef]
- Li, Z.; Sun, W.; Gao, H. Road-Holding-Oriented Control and Analysis of Semi-Active Suspension Systems. J. Dyn. Syst. Meas. Control 2019, 141. [Google Scholar] [CrossRef]
- Van der Sande, T.P.; Merks, M.; Lindeman, E.; Nijmeijer, H. Rule-based control of a semi-active suspension system for road holding using limited sensor information: Design and experiments. Veh. Syst. Dyn. 2021, 1–19. [Google Scholar] [CrossRef]
- Prabakar, R.; Sujatha, C.; Narayanan, S. Response of a quarter car model with optimal magnetorheological damper parameters. J. Sound Vib. 2013, 332, 2191–2206. [Google Scholar] [CrossRef]
- Tusset, A.M.; Rafikov, M.; Balthazar, J.M. An Intelligent Controller Design for Magnetorheological Damper Based on a Quarter-car Model. J. Vib. Control 2009, 15, 1907–1920. [Google Scholar] [CrossRef]
- Piñón, A.; Favela-Contreras, A.; Félix-Herrán, L.C.; Beltran-Carbajal, F.; Lozoya, C. An ARX Model-Based Predictive Control of a Semi-Active Vehicle Suspension to Improve Passenger Comfort and Road-Holding. Actuators 2021, 10, 47. [Google Scholar] [CrossRef]
- Samn, A.A.; Abdelhaleem, A.; Kabeel, A.M.; Gad, E.H. Ride Comfort, Road Holding, and Energy Harvesting of a Hydraulic Regenerative Vehicle Suspension. SAE Int. J. Passeng.-Cars-Mech. Syst. 2020, 13, 159–171. [Google Scholar] [CrossRef]
- Puneet, N.; Hegale, A.; Kumar, H.; Gangadharan, K. Optimal Parameters Identification of Quarter Car Simulink Model for Better Ride Comfort and Road Holding. In Recent Advances in Computational Mechanics and Simulations; Springer: Singapore, 2021; pp. 623–636. [Google Scholar]
- Prabakar, R.S.; Sujatha, C.; Narayanan, S. Response of a half-car model with optimal magnetorheological damper parameters. J. Vib. Control 2016, 22, 784–798. [Google Scholar] [CrossRef]
- Sharp, R.; Pilbeam, C. On the Ride Comfort Benefits available from Road Preview with Slow-active Car Suspensions. In The Dynamics of Vehicles on Roads and on Tracks; CRC Press: London, UK, 2021; pp. 437–448. [Google Scholar]
- Youn, I.; Wu, L.; Youn, E.; Tomizuka, M. Attitude motion control of the active suspension system with tracking controller. Int. J. Automot. Technol. 2015, 16, 593–601. [Google Scholar] [CrossRef]
- Lin, J.S.; Huang, C.J. Nonlinear Backstepping Active Suspension Design Applied to a Half-Car Model. Vehicle System Dynamics 2004, 42, 373–393. [Google Scholar] [CrossRef]
- Demir, O.; Keskin, I.; Cetin, S. Modeling and control of a nonlinear half-vehicle suspension system: A hybrid fuzzy logic approach. Nonlinear Dyn. 2012, 67, 2139–2151. [Google Scholar] [CrossRef]
- Souilem, H.; Mehjoub, S.; Derbel, N. Intelligent control for a half-car active suspension by self-tunable fuzzy inference system. Int. J. Fuzzy Syst. Adv. Appl. 2015, 2, 9–15. [Google Scholar]
- Abbas, W.; Emam, A.; Badran, S.; Shebl, M.; Abouelatta, O. Optimal Seat and Suspension Design for a Half-Car with Driver Model Using Genetic Algorithm. Intell. Control. Autom. 2013, 4, 199–205. [Google Scholar] [CrossRef] [Green Version]
- Marzbanrad, J.; Poozesh, P.; Damroodi, M. Improving vehicle ride Comfort using an active and semi-active controller in a half-car model. J. Vib. Control 2013, 19, 1357–1377. [Google Scholar] [CrossRef]
- Ahmad, I.; Ge, X.; Han, Q.L. Communication-Constrained Active Suspension Control for Networked In-Wheel Motor-Driven Electric Vehicles with Dynamic Dampers. IEEE Trans. Intell. Veh. 2022. [Google Scholar] [CrossRef]
- Savkoor, A.; Manders, S.; Riva, P. Design of actively controlled aerodynamic devices for reducing pitch and heave of truck cabins. JSAE Rev. 2001, 22, 421–434. [Google Scholar] [CrossRef]
- Savkoor, A. Aerodynamic vehicle ride control with active spoilers. In Proceedings of the AVEC’96, Aachen, Germany, 25–27 June 1996; pp. 647–681. [Google Scholar]
- Meijaard, J.; Savkoor, A.; Lodewijks, G. Potential for Vehicle Ride Improvement Using Both Suspension and Aerodynamic Actuators. In Proceedings of the IEEE International Symposium on Industrial Electronics, ISIE 2005, Dubrovnik, Croatia, 20–23 June 2005; Volume 1, pp. 385–390. [Google Scholar]
- Doniselli, C.; Mastinu, G.; Gobbi, M. Aerodynamic Effects on Ride Comfort and Road Holding of Automobiles. Veh. Syst. Dyn. 1996, 25, 99–125. [Google Scholar] [CrossRef]
- Corno, M.; Bottelli, S.; Panzani, G.; Spelta, C.; Tanelli, M.; Savaresi, S.M. Performance Assessment of Active Aerodynamic Surfaces for Comfort and Handling Optimization in Sport Cars. IEEE Trans. Control. Syst. Technol. 2015, 24, 189–199. [Google Scholar] [CrossRef]
- Hosseinian Ahangarnejad, A.; Melzi, S. Numerical analysis of the influence of an actively controlled spoiler on the handling of a sports car. J. Vib. Control 2018, 24, 5437–5448. [Google Scholar] [CrossRef]
- Diba, F.; Barari, A.; Esmailzadeh, E. Handling and safety enhancement of race cars using active aerodynamic systems. Veh. Syst. Dyn. 2014, 52, 1171–1190. [Google Scholar] [CrossRef]
- Diba, F.; Barari, A.; Esmailzadeh, E. Active Aerodynamic System to Improve the Safety and Handling of Race Cars in Lane Change and Wet Road Maneuvers. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 12–15 August 2012; Volume 45059, pp. 417–423. [Google Scholar]
- Wu, Y.; Chen, Z. Improving Road Holding and Ride Comfort of Vehicle Using Dual Active Aerodynamic Surfaces. In Proceedings of the 2018 2nd International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 23–25 June 2018; pp. 1–5. [Google Scholar]
- Ahmad, E.; Iqbal, J.; Arshad Khan, M.; Liang, W.; Youn, I. Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle. Electronics 2020, 9, 1463. [Google Scholar] [CrossRef]
- Scamarcio, A.; Gruber, P.; De Pinto, S.; Sorniotti, A. Anti-jerk controllers for automotive applications: A review. Annu. Rev. Control 2020, 50, 174–189. [Google Scholar] [CrossRef]
- Lin, Y.; McPhee, J.; Azad, N.L. Anti-Jerk On-Ramp Merging Using Deep Reinforcement Learning. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 7–14. [Google Scholar] [CrossRef]
- Scamarcio, A.; Metzler, M.; Gruber, P.; De Pinto, S.; Sorniotti, A. Comparison of Anti-Jerk Controllers for Electric Vehicles With On-Board Motors. IEEE Trans. Veh. Technol. 2020, 69, 10681–10699. [Google Scholar] [CrossRef]
- Scamarcio, A.; Caponio, C.; Mihalkov, M.; Georgiev, P.; Ahmadi, J.; So, K.M.; Tavernini, D.; Sorniotti, A. Predictive anti-jerk and traction control for V2X connected electric vehicles with central motor and open differential. IEEE Trans. Veh. Technol. 2022. [Google Scholar] [CrossRef]
- König, D.H.; Riemann, B.; Böhning, M.; Syrnik, R.; Rinderknecht, S. Robust anti-jerk control for electric vehicles with multi-speed transmission. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 3298–3303. [Google Scholar] [CrossRef]
- Gohrle, C.; Schindler, A.; Wagner, A.; Sawodny, O. Design and vehicle implementation of preview active suspension controllers. IEEE Trans. Control. Syst. Technol. 2013, 22, 1135–1142. [Google Scholar] [CrossRef]
- Kim, H.J.; Yang, H.S.; Park, Y.P. Improving the vehicle performance with active suspension using road-sensing algorithm. Comput. Struct. 2002, 80, 1569–1577. [Google Scholar] [CrossRef]
- Ahmed, M.; Svaricek, F. Preview control of semi-active suspension based on a half-car model using fast fourier transform. In Proceedings of the 10th International Multi-Conferences on Systems, Signals & Devices 2013 (SSD13), Hammamet, Tunisia, 18–21 March 2013; pp. 1–6. [Google Scholar]
- Youn, I.; Khan, M.; Uddin, N.; Youn, E.; Tomizuka, M. Road disturbance estimation for the optimal preview control of an active suspension systems based on tracked vehicle model. Int. J. Automot. Technol. 2017, 18, 307–316. [Google Scholar] [CrossRef]
- Birla, N.; Swarup, A. Optimal preview control: A review. Optim. Control. Appl. Methods 2015, 36, 241–268. [Google Scholar] [CrossRef]
- Zhen, Z.; Jiang, S.; Ma, K. Automatic carrier landing control for unmanned aerial vehicles based on preview control and particle filtering. Aerosp. Sci. Technol. 2018, 81, 99–107. [Google Scholar] [CrossRef]
- Zhou, H.; Gao, J.; Liu, H. Vehicle speed preview control with road curvature information for safety and comfort promotion. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1527–1538. [Google Scholar] [CrossRef]
- Yim, S. Design of a preview controller for vehicle rollover prevention. IEEE Trans. Veh. Technol. 2011, 60, 4217–4226. [Google Scholar] [CrossRef]
- Choi, H.D.; Lee, C.J.; Lim, M.T. Fuzzy preview control for half-vehicle electro-hydraulic suspension system. Int. J. Control. Autom. Syst. 2018, 16, 2489–2500. [Google Scholar] [CrossRef]
- Youn, I.; Hać, A. Semi-active suspensions with adaptive capability. J. Sound Vib. 1995, 180, 475–492. [Google Scholar] [CrossRef]
- Hou, J.; Cao, X.; Zhan, C. Symmetry Control of Comfortable Vehicle Suspension Based on H∞. Symmetry 2022, 14, 171. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unit |
|---|---|---|---|
| M | Vehicle body mass | 500 | Kg |
| I | Moment of inertia | 274 | Kg · m |
| Vehicle unsprung mass | 25 | Kg | |
| Suspension stiffness | 10 | ||
| Tire stiffness | 1 | ||
| Damping coefficients | 1 | ||
| a | Distance of C.M from right side | 0.74 | m |
| b | Distance of C.M from left side | 0.74 | m |
| h | Height of C.M from the ground | 0.70 | m |
| Weighting Constants | Targets | AJPC | OPC |
|---|---|---|---|
| Heaving acceleration | 1 | 1 | |
| Rolling acceleration | 1 | 1 | |
| Suspension deflection | |||
| Tire deflection | |||
| Jerk controller |
| Performance Parameters | OPC | AJPC |
|---|---|---|
| Right jerk control input | 100 | 15 |
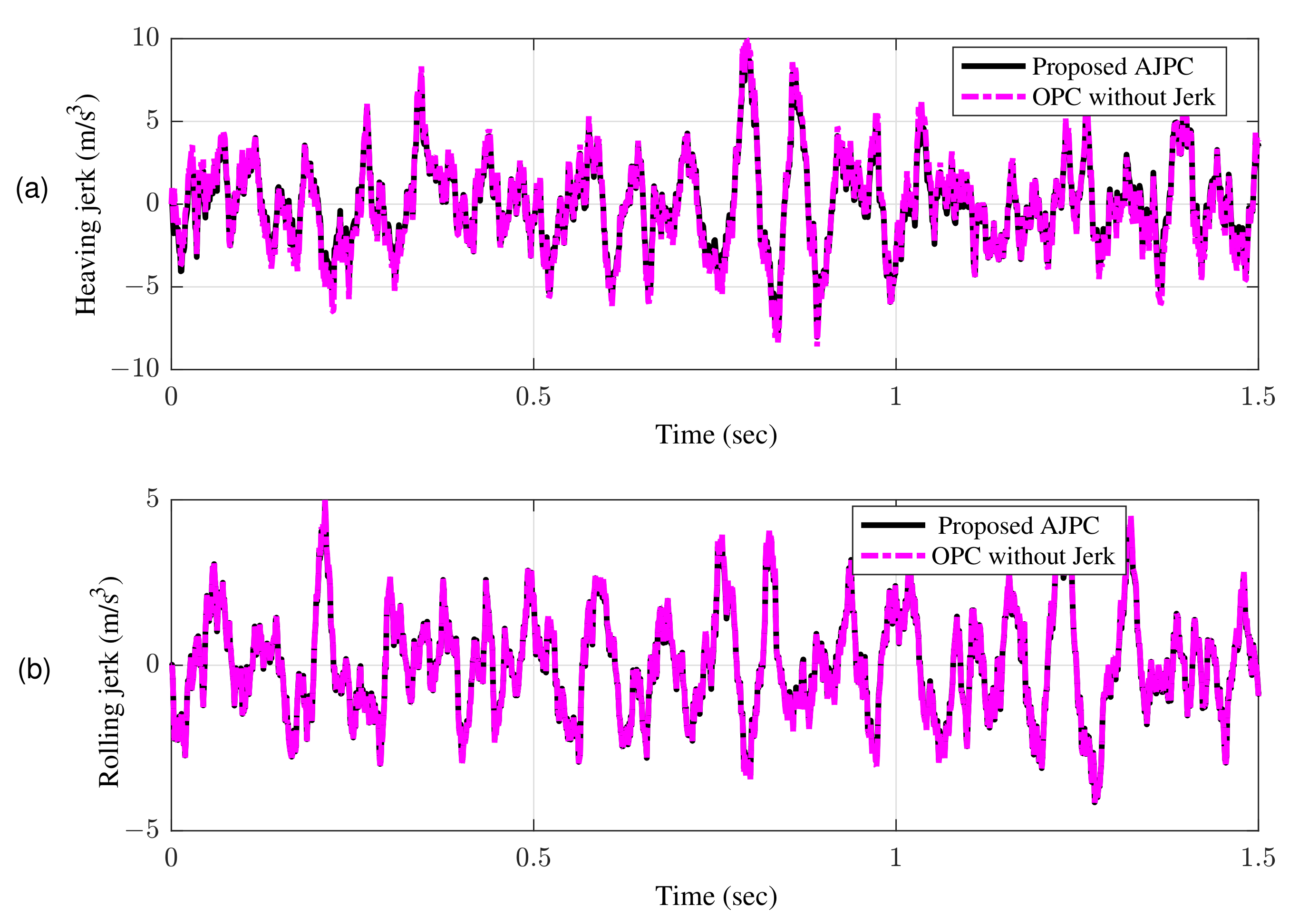
| Heaving jerk | 100 | 92.88 |
| Roll jerk | 100 | 97.6 |
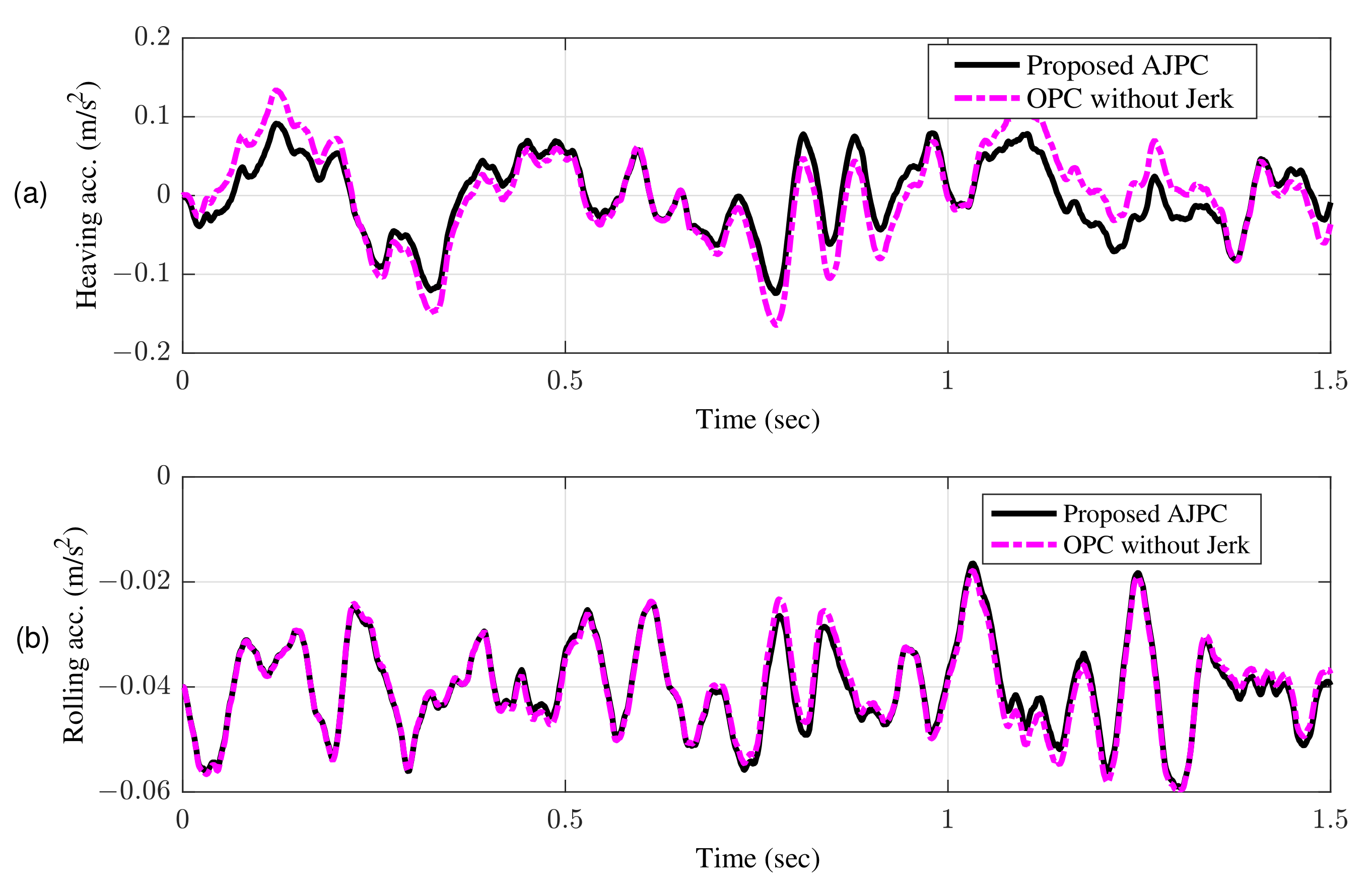
| Heaving acceleration | 100 | 86 |
| Rolling acceleration | 100 | 98 |
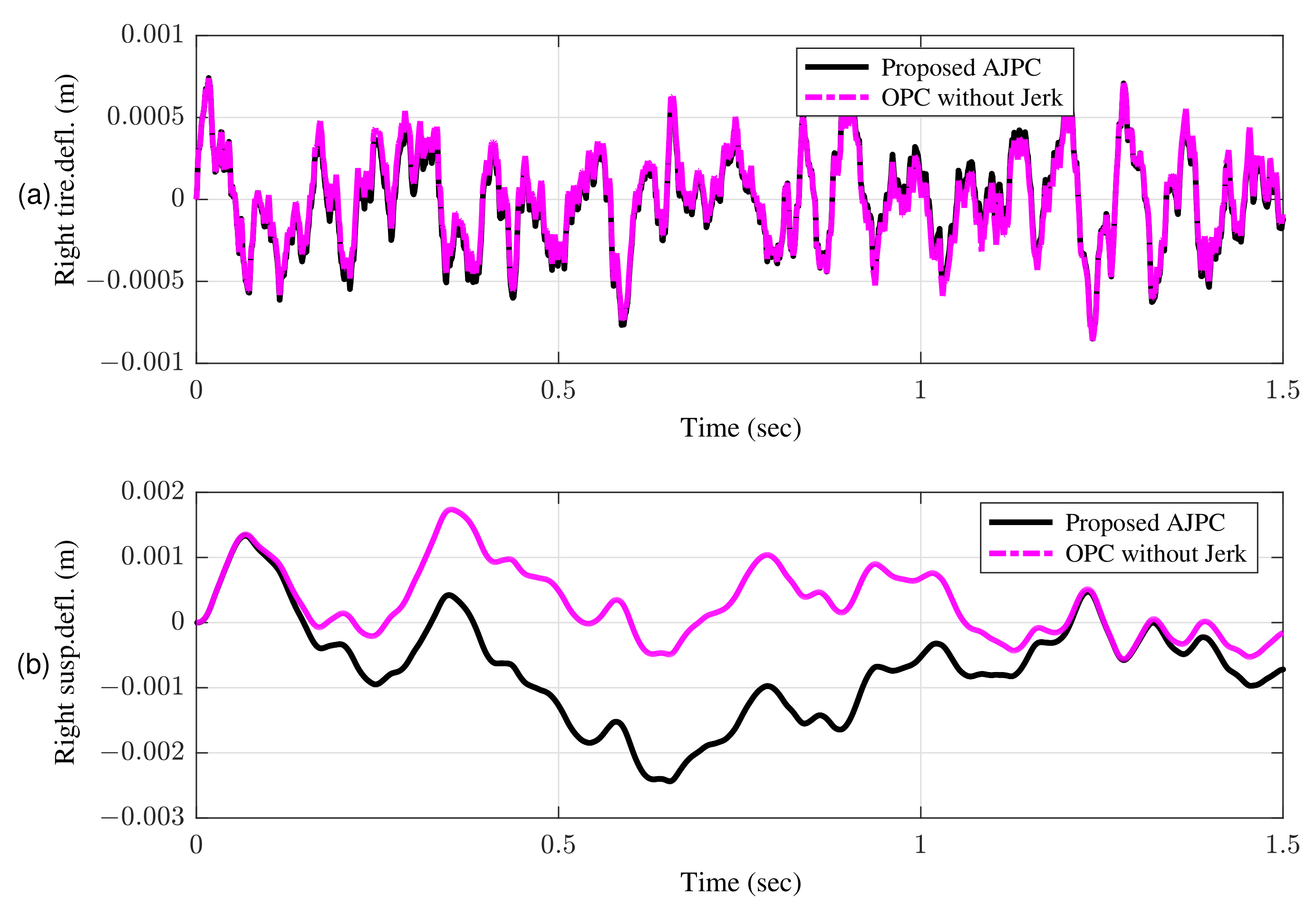
| Right tyre deflection | 100 | 96 |
| Right suspension deflection | 100 | 89 |
| Roll angle | 100 | 96 |
| Total performance | 100 | 96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, E.; Youn, I. Performance Improvement of a Vehicle Equipped with Active Aerodynamic Surfaces Using Anti-Jerk Preview Control Strategy. Sensors 2022, 22, 8057. https://doi.org/10.3390/s22208057
Ahmad E, Youn I. Performance Improvement of a Vehicle Equipped with Active Aerodynamic Surfaces Using Anti-Jerk Preview Control Strategy. Sensors. 2022; 22(20):8057. https://doi.org/10.3390/s22208057
Chicago/Turabian StyleAhmad, Ejaz, and Iljoong Youn. 2022. "Performance Improvement of a Vehicle Equipped with Active Aerodynamic Surfaces Using Anti-Jerk Preview Control Strategy" Sensors 22, no. 20: 8057. https://doi.org/10.3390/s22208057
APA StyleAhmad, E., & Youn, I. (2022). Performance Improvement of a Vehicle Equipped with Active Aerodynamic Surfaces Using Anti-Jerk Preview Control Strategy. Sensors, 22(20), 8057. https://doi.org/10.3390/s22208057