
A Generalized Laser Simulator Algorithm for Mobile Robot Path Planning with Obstacle Avoidance
 , ,
, ,  , , , ,
, , , ,
Abstract
:1. Introduction
2. Background and Related Works
3. Generalized Laser Simulator (GLS) Algorithm
3.1. Modelling of Workspace
3.1.1. Modelling of Workspace for Global Path Planning
3.1.2. Modelling of Workspace for Local Path Planning
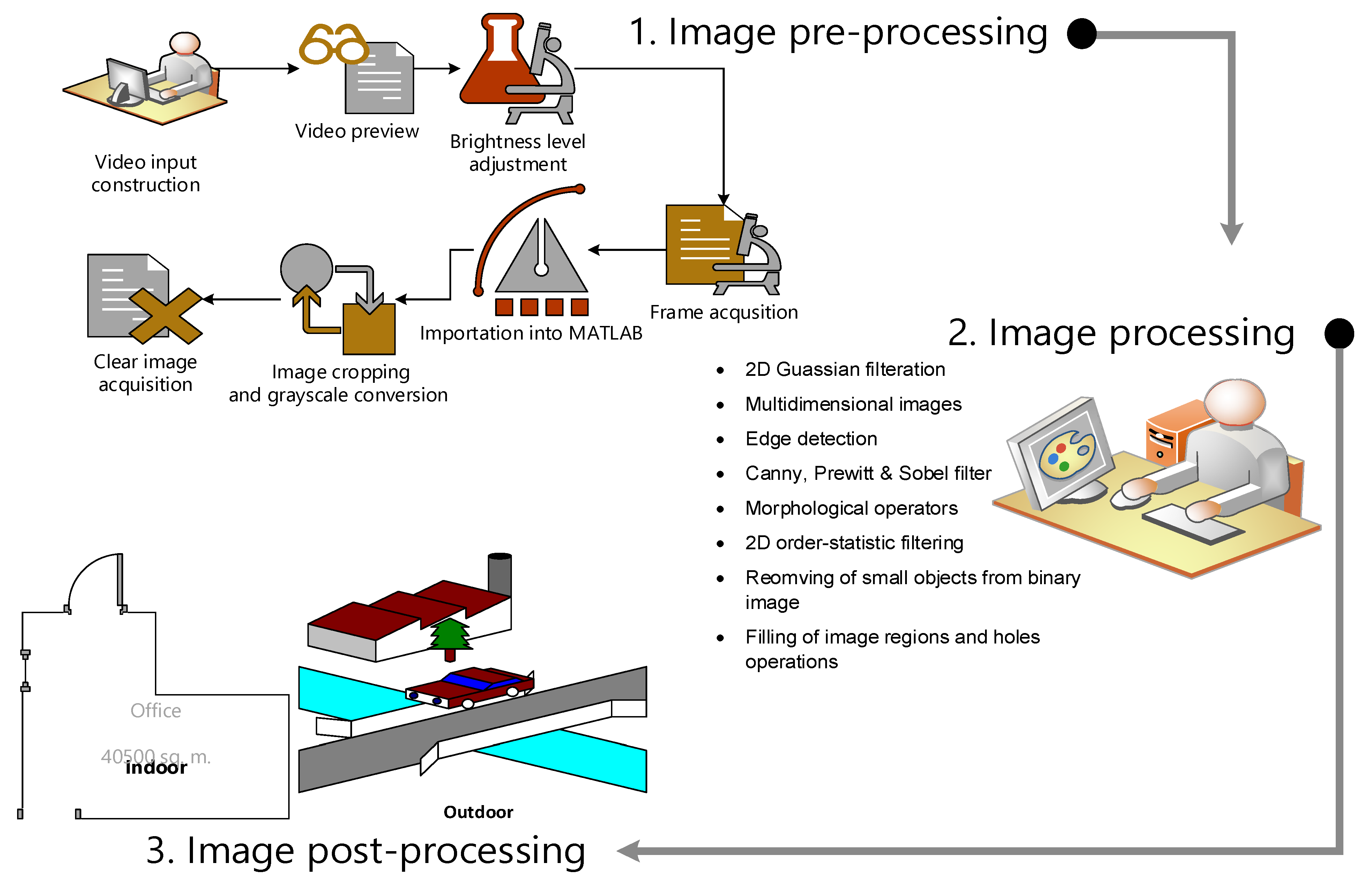
- Image preprocessing for preparing the images is shown in Figure 1.
- Image processing and generating a local map for the robot’s working environment. This constitutes processes that allow for the extraction of road borders from images and the removal and filtering of noise.
- Post-processing algorithms for local path planning.
3.2. Formulation of GLS
3.3. Obstacle Avoidance
3.3.1. Static Obstacles Avoidance
3.3.2. Dynamic Obstacle Avoidance
3.4. Experimental Settings
3.4.1. Investigation of GLS in Global Path Planning
3.4.2. Investigation of GLS in Local Path Planning
3.5. Performance Metrics
3.5.1. Total Search Time (ST)
3.5.2. Path Cost (PC)
3.5.3. Path Smoothness
4. GLS Implementation in Local and Global Path Planning
4.1. Investigation of GLS in Global Path Planning
4.1.1. Static Obstacle
4.1.2. Dynamic Obstacles
4.2. Investigation of GLS in Local Path planning
4.2.1. Indoor Results
4.2.2. Outdoor Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Muhammad, A.; Ali, M.A.H.; Turaev, S.; Shanono, I.H.; Hujainah, F.; Zubir, M.N.M.; Faiz, M.K.; Faizal, E.R.M.; Abdulghafor, R. Novel Algorithm for Mobile Robot Path Planning in Constrained Environment. Comput. Mater. Contin. 2021, 71, 2697–2719. [Google Scholar] [CrossRef]
- Leena, N.; Saju, K. A survey on path planning techniques for autonomous. IOSR J. Mech. Civ. Eng. 2014, 11, 76–79. [Google Scholar]
- Han, J.; Seo, Y. Mobile robot path planning with surrounding point set and path improvement. Appl. Soft Comput. 2017, 57, 35–47. [Google Scholar] [CrossRef]
- Victerpaul, P.; Saravanan, D.; Janakiraman, S.; Pradeep, J. Path planning of autonomous mobile robots: A survey and comparison. J. Adv. Res. Dyn. Control Syst. 2017, 9, 1535–1565. [Google Scholar]
- Ankit, R.A.; Ravankar, A.; Emaru, T.; Kobayashi, Y. HPPRM: Hybrid Potential Based Probabilistic Roadmap Algorithm for Improved Dynamic Path Planning of Mobile Robots. IEEE Access 2020, 8, 221743–221766. [Google Scholar]
- Muhammad, A.; Ali, M.A.; Shanono, I.H. Path Planning Methods for Mobile Robots: A systematic and Bibliometric Review. Elektr. J. Electr. Eng. 2020, 19, 14–34. [Google Scholar]
- Chao, N.; Liu, Y.-K.; Xia, H.; Ayodeji, A.; Bai, L. Grid-based RRT* for minimum dose walking path-planning in complex radioactive environments. Ann. Nucl. Energy 2018, 115, 73–82. [Google Scholar] [CrossRef]
- Shuma, A.; Morrisa, K.; Khajepourb, A. Direction-dependent optimal path planning for autonomous vehicles. Robot. Auton. Syst. 2015, 70, 202–214. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, D.W.; Zhang, J.H. Robot path planning in uncertain environment using multi-objective particle swarm optimization. Neurocomputing 2013, 103, 172–185. [Google Scholar] [CrossRef]
- Choset, H.; Lynch, K.M.; Hutchinson, S.; Kantor, G.A.; Burgard, W. Principles of Robot Motion: Theory, Algorithms, and Implementation; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Bakdi, A.; Hentout, A.; Boutami, H.; Maoudj, A.; Hachour, O.; Bouzouia, B. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Robot. Auton. Syst. 2017, 89, 95–109. [Google Scholar] [CrossRef]
- Perez, T.L.; Wesley, M.A. An algorithm for planning collision-free paths among polyhedral obstacles. Commun. ACM 1979, 22, 560–570. [Google Scholar] [CrossRef]
- Jinglun, Y.; Yuancheng, S.; Yifan, L. The Path Planning of Mobile Robot by Neural Networks and Hierarchical Reinforcement Learning. Front. Neurorobotics 2020, 14, 1–12. [Google Scholar]
- Aisha, M.; Mohammed, A.H.A.; Ibrahim, H.S. A review: On Intelligent Mobile Robot Path Planning Techniques. In Proceedings of the 2021 IEEE 11th IEEE Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang, Malaysia, 3–4 April 2021; pp. 53–58. [Google Scholar]
- Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J. A Survey of Path Planning Algorithms for Mobile Robots. Vehicles 2021, 2021, 448–468. [Google Scholar] [CrossRef]
- Minguez, J.; Lamiraux, F.; Laumond, J. Motion Planning and Obstacle Avoidance. In Springer Handbook of Robotics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 827–852. [Google Scholar]
- Takahashi, O.; Schilling, R. Motion planning in a plane using generalized Voronoi diagrams. IEEE Trans. Robot. Autom. 1989, 5, 143–150. [Google Scholar] [CrossRef]
- Al-Dahhan, M.H.; Schmidt, K.W. Voronoi Boundary Visibility for Efficient Path Planning. IEEE Access 2020, 8, 134764–134781. [Google Scholar] [CrossRef]
- Maekawa, T.; Noda, T.; Tamura, S.; Ozaki, T.; Machida, K.-I. Curvature continuous path generation for autonomous vehicle using B-spline curves. Comput. Des. 2010, 42, 350–359. [Google Scholar] [CrossRef]
- Borenstein, J.; Koren, Y. Real-time obstacle avoidance for fast mobile robots. IEEE Trans. Syst. Man Cybern. 1989, 19, 1179–1187. [Google Scholar] [CrossRef] [Green Version]
- Orozco-Rosas, U.; Picos, K.; Montiel, O. Hybrid Path Planning Algorithm Based on Membrane Pseudo-Bacterial Potential Field for Autonomous Mobile Robots. IEEE Access 2019, 7, 156787–156803. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. SHP: Smooth Hypocycloidal Paths with Collision-Free and Decoupled Multi-Robot Path Planning. Int. J. Adv. Robot. Syst. 2016, 13, 133. [Google Scholar] [CrossRef] [Green Version]
- Kala, R.; Shukla, A.; Tiwari, R. Robotic path planning in static environment using hierarchical multi-neuron heuristic search and probability based fitness. Neurocomputing 2011, 74, 2314–2335. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1985, 5, 90–98. [Google Scholar] [CrossRef]
- Barraquand, J.; Langlois, B.; Latombe, J.-C. Numerical Potential Field Techniques for Robot Path Planning. IEEE Trans. Syst. Man Cybern. 1992, 22, 224–241. [Google Scholar] [CrossRef]
- Cetin, O.; Zagli, I.; Yilmaz, G. Establishing Obstacle and Collision Free Communication Relay for UAVs with Artificial Potential Fields. J. Intell. Robot. Syst. 2012, 69, 361–372. [Google Scholar] [CrossRef]
- Borenstein, J.; Koren, Y. The vector field histogram-fast obstacle avoidance for mobile robots. IEEE Trans. Robot. Autom. 1991, 7, 278–288. [Google Scholar] [CrossRef] [Green Version]
- Ulrich, I.; Borenstein, J. VFH*: Local obstacle avoidance with look-ahead verification. In Proceedings of the Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; pp. 2505–2511. [Google Scholar]
- Ulrich, I.; Borenstein, J. VFH+: Reliable Obstacle Avoidance for Fast Mobile Robots. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 20 May 1998; pp. 1572–1577. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Watanabe, M.; Hoshino, Y.; Rawankar, A. Multi-robot path planning for smart access of distributed charging points in map. Artif. Life Robot. 2020, 26, 52–60. [Google Scholar] [CrossRef]
- Tuncer, A.; Yildirim, M. Dynamic path planning of mobile robots with improved genetic algorithm. Comput. Electr. Eng. 2012, 38, 1564–1572. [Google Scholar] [CrossRef]
- Ayawli, B.B.K.; Mei, X.; Shen, M.; Appiah, A.Y.; Kyeremeh, F. Mobile Robot Path Planning in Dynamic Environment Using Voronoi Diagram and Computation Geometry Technique. IEEE Access 2017, 7, 86026–86040. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Hoshino, Y.; Kobayashi, Y. Virtual Obstacles for Safe Mobile Robot Navigation. In Proceedings of the 2019 8th International Congress on Advanced Applied Informatics (IIAI-AAI), Toyama, Japan, 7–11 July 2019; pp. 552–555. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Hitchhiking Robots: A Collaborative Approach for Efficient Multi-Robot Navigation in Indoor Environments. Sensors 2017, 17, 1878. [Google Scholar] [CrossRef] [Green Version]
- Ravankar, A.; Ravankar, A.A.; Hoshino, Y.; Emaru, T. Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing. Sensors 2017, 17, 1581. [Google Scholar] [CrossRef] [Green Version]
- Elbanhawi, M.; Simic, M. Sampling-Based Robot Motion Planning: A Review. IEEE Access 2014, 2, 56–77. [Google Scholar] [CrossRef]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. on Robot. Aut. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- LaValle, S.M.; Kuffner, J.J. Randomized Kinodynamic Planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Qureshi, A.H.; Ayaz, Y. Potential functions based sampling heuristic for optimal path planning. Auton. Robot. 2016, 40, 1079–1093. [Google Scholar] [CrossRef] [Green Version]
- Janson, L.; Ichter, B.; Pavone, M. Deterministic sampling-based motion planning: Optimality, complexity, and performance. Int. J. Robot. Res. 2018, 37, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Fu, B.; Chen, L.; Zhou, Y.; Zheng, D.; Wei, Z.; Dai, J.; Pan, H. An improved A* algorithm for the industrial robot path planning with high success rate and short length. Robot. Auton. Syst. 2018, 106, 26–37. [Google Scholar] [CrossRef]
- Wang, W.; Zuo, L.; Xu, X. A Learning-based Multi-RRT Approach for Robot Path Planning in Narrow Passages. J. Intell. Robot. Syst. 2017, 90, 81–100. [Google Scholar] [CrossRef]
- Xinyu, W.; Xiaojuan, L.; Yong, G.; Jiadong, S.; Rui, W. Bidirectional Potential Guided RRT* for Motion Planning. IEEE Access 2019, 7, 95046–95057. [Google Scholar] [CrossRef]
- Bohlin, R.; Kavraki, L. Path planning using lazy PRM. In Proceedings of the Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; pp. 521–528. [Google Scholar]
- Morales, M.; Rodriguez, S.; Amato, N.M. Improving the connectivity of PRM roadmaps. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; pp. 4427–4432. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef] [Green Version]
- Lynch, K.M.; Park, F.C. Modern Robotics; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.C. Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges. Sensors 2018, 18, 3170. [Google Scholar] [CrossRef] [Green Version]
- Ravankar, A.; Ravankar, A.A.; Rawankar, A.; Hoshino, Y.; Kobayashi, Y. ITC: Infused Tangential Curves for Smooth 2D and 3D Navigation of Mobile Robots. Sensors 2019, 19, 4384. [Google Scholar] [CrossRef] [Green Version]
- Lamini, C.; Benhlima, S.; Elbekri, A. Genetic Algorithm Based Approach for Autonomous Mobile Robot Path Planning. Procedia Comput. Sci. 2018, 127, 180–189. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, S. A knowledge based genetic algorithm for path planning of a mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 4350–4355. [Google Scholar]
- Karami, A.H.; Hasanzadeh, M. An adaptive genetic algorithm for robot motion planning in 2D complex environments. Comput. Electr. Eng. 2015, 43, 317–329. [Google Scholar] [CrossRef]
- Huang, H.C.; Tsai, C.C. Global path planning for autonomous robot navigation using hybrid metaheuristic GA-PSO algorithm. In Proceedings of the SICE Annual Conference 2011, Tokyo, Japan, 13–18 September 2011; pp. 1338–1343. [Google Scholar]
- Bi, Z.; Yimin, Y.; Wei, Y. Hierarchical path planning approach for mobile robot navigation under the dynamic environment. In Proceedings of the 2008 6th IEEE International Conference on Industrial Informatics, Daejeon, Korea, 13–16 July 2008; pp. 372–376. [Google Scholar] [CrossRef]
- Zhang, K.; Niroui, F.; Ficocelli, M.; Nejat, G. Robot Navigation of Environments with Unknown Rough Terrain Using deep Reinforcement Learning. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Zhang, H.-Y.; Lin, W.-M.; Chen, A.-X. Path Planning for the Mobile Robot: A Review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef]
- Patle, B.; L, G.B.; Pandey, A.; Parhi, D.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Seçkin, A. A Natural Navigation Method for Following Path Memories from 2D Maps. Arab. J. Sci. Eng. 2020, 45, 10417–10432. [Google Scholar] [CrossRef]
- Stenning, B.E.; McManus, C.; Barfoot, T.D. Planning using a Network of Reusable Paths: A Physical Embodiment of a Rapidly Exploring Random Tree. J. Field Robot. 2013, 30, 916–950. [Google Scholar] [CrossRef]
- Khan, A.H.; Li, S.; Luo, X. Obstacle Avoidance and Tracking Control of Redundant Robotic Manipulator: An RNN-Based Metaheuristic Approach. IEEE Trans. Ind. Inform. 2020, 16, 4670–4680. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.H.; Li, S.; Cao, X. Tracking control of redundant manipulator under active remote center-of-motion constraints: An RNN-based metaheuristic approach. Sci. China Inf. Sci. 2021, 64, 1–18. [Google Scholar] [CrossRef]
- Ali, M.A.H.; Mailah, M. Path Planning and Control of Mobile Robot in Road Environments Using Sensor Fusion and Active Force Control. IEEE Trans. Veh. Technol. 2019, 68, 2176–2195. [Google Scholar] [CrossRef]
- Ali, M.A.H.; Mailah, M.; Jabbar, W.A.; Moiduddin, K.; Ameen, W.; Alkhalefah, H. Autonomous Road Roundabout Detection and Navigation System for Smart Vehicles and Cities Using Laser Simulator–Fuzzy Logic Algorithms and Sensor Fusion. Sensors 2020, 20, 3694. [Google Scholar] [CrossRef]
- Ali, M.A.; Mailah, M. Laser simulator: A novel search graph-based path planning approach. Int. J. Adv. Robot. Syst. 2018, 15, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.A.H.; Mailah, M.; Moiduddin, K.; Ameen, W.; Alkhalefah, H. Development of an Autonomous Robotics Platform for Road Marks Painting Using Laser Simulator and Sensor Fusion Technique. Robotica 2020, 39, 535–556. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author Year | Algorithm | Static Obstacle | Dynamic Obstacle | Mapping | Online Path Planning | Indoor/Outdoor | Type of Test |
|---|---|---|---|---|---|---|---|
| Zhang 2018 | DRL | Yes | Yes | 3D | No | - | Simulation |
| Chao 2018 | GB-RRT | Yes | No | 2D | No | - | Simulation |
| Shum 2015 | OUM-BD | Yes | No | 2D | No | - | Simulation |
| Zhang 2012 | Multi-objective PSO | Yes | No | 2D | No | - | Simulation |
| Bakdi2017 | GA/AFL | Yes | No | 2D | Yes | Indoor | Simulation/Experiment |
| Han 2017 | SPS/PI FLP | Yes | No | 2D | No | - | Simulation |
| Muhammad 2021 | GLS | Yes | Yes | 2D | Yes | Indoor/Outdoor | Simulation/Experiment |
| Khatib 1985 | APF | No | Yes | 2D | Yes | Indoor | Simulation/Experiment |
| Barraquand 1992 | PF | Yes | Yes | 2D | No | - | Simulation |
| Cetin 2012 | APF | Yes | No | 2D | No | - | Simulations |
| Borenstein 1991 | VFHV | Yes | No | 2D | No | Indoor | Simulation/Experiment |
| Ulrich 2000 | VFH* | Yes | No | 2D | Yes | Indoor | Simulation/Experiment |
| Ulrich 1998 | VFH+ | Yes | No | 2D | Yes | Indoor | Simulation/Experiment |
| Ravankar 2020 | VFH+ | Yes | Yes | 2D | Yes | - | Simulation |
| Tuncer 2012 | GA | Yes | Yes | 2D | No | - | Simulation |
| Ayawli 2019 | VD/CGT | Yes | Yes | 2D | No | - | Simulation |
| Ravankar 2019 | VD/CGT | Yes | Yes | 2D | Yes | Indoor/Outdoor | Simulation/Experiment |
| Ravankar 2017 | VD/CGT | Yes | Yes | 2D | Yes | Indoor/Outdoor | Simulation/ Experiment |
| Ravankar 2017 | VD/CGT | Yes | Yes | 2D | Yes | Indoor/Outdoor | Simulation/Experiment |
| Qureshi 2016 | P-RRT* | Yes | No | 2D | No | - | Simulation |
| Fu 2018 | Improved A* | Yes | No | 2D | Yes | Indoor | Simulation/Experiment |
| Wang 2018 | LM-RRT | Yes | No | 2D | Yes | Indoor | Simulation/Experiment |
| Xinyu 2019 | Bidirectional-RRT | Yes | No | 2D | Yes | Indoor | Simulation/Experiments |
| Bohlin 2000 | Lazy PRM | Yes | No | 2D | Yes | Indoor | Simulation/Experiment |
| Karaman 2011 | PRM* & RRT* | Yes | No | 2D | Yes | - | Simulation |
| Ravankar 2019 | ITC | Yes | No | 2D/3D | Yes | Indoor | Simulation/Experiment |
| Lamini 2018 | GA | Yes | No | 2D | No | - | Simulation |
| Hu 2004 | GA | Yes | Yes | 2D | No | - | Simulation |
| Karami 2015 | GA | Yes | No | 2D | No | - | Simulation |
| Huang 2011 | GA-PSO | Yes | No | 2D | No | - | Simulation |
| Bi 2008 | GA-FL | Yes | Yes | 2D | Yes | - | Simulation |
| Ali 2019 | LS/Sensor fusion | Yes | No | 2D | Yes | Indoor/ Outdoor | Simulation/Experiment |
| Ali 2020 | LS/FL | Yes | No | 2D | Yes | Indoor/ Outdoor | Simulation/Experiment |
| Ali 2018 | LS/Vision system | Yes | No | 2D | Yes | Indoor/ Outdoor | Simulation/Experiment |
| Maps | A | B | C | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Algorithm | PRM | RRT | A* | GLS | PRM | RRT | A* | GLS | PRM | RRT | A* | GLS |
| Trials | ||||||||||||
| 1 | 807.71 | 797.21 | 697.77 | 663 | 694.53 | 709.94 | 611.14 | 579 | 593.91 | 580.85 | 477.97 | 463 |
| 2 | 782.16 | 881.74 | 697.77 | 651 | 697.57 | 713.55 | 611.14 | 583 | 676.37 | 537.18 | 477.97 | 411 |
| 3 | 800.85 | 802.04 | 697.77 | 692 | 671.06 | 789.11 | 611.14 | 501 | 590.54 | 506.87 | 477.9 | 392 |
| 4 | 702.00 | 719.00 | 697.77 | 678 | 669.37 | 675.72 | 611.14 | 536 | 610.73 | 563.23 | 477.9 | 397 |
| 5 | 789.55 | 889.44 | 697.77 | 667 | 746.00 | 787.44 | 611.14 | 589 | 492.79 | 460.74 | 477.97 | 467 |
| 6 | 854.25 | 839.82 | 697.77 | 698 | 783.12 | 698.78 | 611.14 | 452 | 574.80 | 531.30 | 477.9 | 398 |
| 7 | 694.29 | 830.40 | 697.77 | 587 | 754.60 | 600.35 | 611.14 | 632 | 741.34 | 529.27 | 477.97 | 387 |
| 8 | 777.30 | 748.67 | 697.77 | 588 | 758.82 | 777.92 | 611.14 | 547 | 617.53 | 521.96 | 477.97 | 388 |
| 9 | 843.70 | 737.65 | 697.77 | 465 | 724.56 | 612.40 | 611.14 | 548 | 460.26 | 495.11 | 477.97 | 365 |
| 10 | 767.20 | 800.23 | 697.77 | 697 | 694.35 | 662.49 | 611.14 | 519 | 692.04 | 790.11 | 477.97 | 397 |
| 11 | 767.23 | 774.09 | 697.77 | 411 | 613.80 | 638.74 | 611.14 | 553 | 799.70 | 706.27 | 477.97 | 214 |
| 12 | 738.25 | 787.16 | 697.77 | 610 | 719.50 | 623.65 | 611.14 | 530 | 745.91 | 537.29 | 477.97 | 310 |
| 13 | 794.71 | 877.68 | 697.77 | 627 | 783.36 | 661.09 | 611.14 | 626 | 644.82 | 513.38 | 477.97 | 427 |
| 14 | 721.37 | 870.13 | 697.77 | 529 | 686.14 | 794.71 | 611.14 | 592 | 505.29 | 565.83 | 477.97 | 329 |
| 15 | 772.06 | 714.39 | 697.77 | 707 | 743.69 | 693.78 | 611.14 | 524 | 548.92 | 637.76 | 477.97 | 437 |
| Maps | A | B | C | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Algorithm | PRM | RRT | A* | GLS | PRM | RRT | A* | GLS | PRM | RRT | A* | GLS |
| Trials | ||||||||||||
| 1 | 2.22 | 4.48 | 137.37 | 1.33 | 4.39 | 4.84 | 69.84 | 1.06 | 4.48 | 3.50 | 54.84 | 2.98 |
| 2 | 3.77 | 7.77 | 137.51 | 2.58 | 4.14 | 3.16 | 68.81 | 1.21 | 3.06 | 4.58 | 55.24 | 2.11 |
| 3 | 3.65 | 5.52 | 140.06 | 2.30 | 3.91 | 3.79 | 69.56 | 3.50 | 4.68 | 5.45 | 56.11 | 3.75 |
| 4 | 2.62 | 4.50 | 135.70 | 2.43 | 3.60 | 3.25 | 68.61 | 2.56 | 3.36 | 3.20 | 54.46 | 2.90 |
| 5 | 3.01 | 10.35 | 144.00 | 2.49 | 3.88 | 3.11 | 67.83 | 2.73 | 3.17 | 7.98 | 53.97 | 3.14 |
| 6 | 3.61 | 11.28 | 136.28 | 2.70 | 4.15 | 2.69 | 70.72 | 2.99 | 3.83 | 6.13 | 55.21 | 2.83 |
| 7 | 2.72 | 4.98 | 138.71 | 1.73 | 3.55 | 2.74 | 69.16 | 2.70 | 3.33 | 3.20 | 52.90 | 2.25 |
| 8 | 4.46 | 10.38 | 134.80 | 2.41 | 4.08 | 4.05 | 68.36 | 3.48 | 4.50 | 2.94 | 54.21 | 2.59 |
| 9 | 3.97 | 7.64 | 134.68 | 2.61 | 2.84 | 3.77 | 69.60 | 1.35 | 3.36 | 9.48 | 54.27 | 3.10 |
| 10 | 3.01 | 6.49 | 139.57 | 1.24 | 3.40 | 2.97 | 69.89 | 2.40 | 4.76 | 3.66 | 53.54 | 3.44 |
| 11 | 2.94 | 5.11 | 134.93 | 1.72 | 3.18 | 4.17 | 67.70 | 1.65 | 3.37 | 2.45 | 54.67 | 2.13 |
| 12 | 2.71 | 8.01 | 137.43 | 2.43 | 3.92 | 3.90 | 69.68 | 2.16 | 2.92 | 4.48 | 54.13 | 2.16 |
| 13 | 2.99 | 5.77 | 136.05 | 1.14 | 3.25 | 5.23 | 72.66 | 2.40 | 4.06 | 2.57 | 53.02 | 2.17 |
| 14 | 2.77 | 3.61 | 136.90 | 1.14 | 3.63 | 5.06 | 69.48 | 2.14 | 3.22 | 10.85 | 57.02 | 3.09 |
| 15 | 3.44 | 4.51 | 138.14 | 1.69 | 3.99 | 3.15 | 70.90 | 1.59 | 4.14 | 4.34 | 54.65 | 3.08 |
| Environments | Simulation/ Experiments | Algorithm | Path Cost (mm) | Search Time (ms) | Path Smoothness (Low: When All Path Has Zigzag, Medium: When Zigzag Existed Partially In Path, High: Small or Non-zigzag Path) |
|---|---|---|---|---|---|
| Environment A Figure 11 | Simulation | A* | 478.34 | 27.89 | Medium |
| PRM | 472.34 | 9.93 | High | ||
| RRT | 506.05 | 3.50 | Low | ||
| GLS | 493.75 | 3.59 | High | ||
| Environment B Figure 11 | Simulation | A* | 540.15 | 84.47 | Medium |
| PRM | 531.84 | 5.99 | High | ||
| RRT | 639.25 | 8.08 | Low | ||
| GLS | 579.25 | 4.17 | High | ||
| Environment C Figure 11 | Simulation | A* | 516.14 | 24.88 | Medium |
| PRM | 522.22 | 7.49 | High | ||
| RRT | 30.05 | 3.64 | Low | ||
| GLS | 662.58 | 2.33 | High | ||
| Environment A Figure 15 | Real-time Experiments | LS | 244.52 | 6.37 | Low |
| GLS | 143.29 | 1.51 | High | ||
| Environment B Figure 15 | Real-time Experiments | LS | 300.29 | 2.89 | Low |
| GLS | 118.88 | 0.26 | High | ||
| Environment C Figure 15 | Real-time Experiments | LS | 336.83 | 5.94 | Low |
| GLS | 205.12 | 0.34 | High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muhammad, A.; Ali, M.A.H.; Turaev, S.; Abdulghafor, R.; Shanono, I.H.; Alzaid, Z.; Alruban, A.; Alabdan, R.; Dutta, A.K.; Almotairi, S. A Generalized Laser Simulator Algorithm for Mobile Robot Path Planning with Obstacle Avoidance. Sensors 2022, 22, 8177. https://doi.org/10.3390/s22218177
Muhammad A, Ali MAH, Turaev S, Abdulghafor R, Shanono IH, Alzaid Z, Alruban A, Alabdan R, Dutta AK, Almotairi S. A Generalized Laser Simulator Algorithm for Mobile Robot Path Planning with Obstacle Avoidance. Sensors. 2022; 22(21):8177. https://doi.org/10.3390/s22218177
Chicago/Turabian StyleMuhammad, Aisha, Mohammed A. H. Ali, Sherzod Turaev, Rawad Abdulghafor, Ibrahim Haruna Shanono, Zaid Alzaid, Abdulrahman Alruban, Rana Alabdan, Ashit Kumar Dutta, and Sultan Almotairi. 2022. "A Generalized Laser Simulator Algorithm for Mobile Robot Path Planning with Obstacle Avoidance" Sensors 22, no. 21: 8177. https://doi.org/10.3390/s22218177