
A Polyimide Film-Based Simple Force Plate for Measuring the Body Mass of Tiny Insects

Abstract
:1. Introduction
2. Design, Principle, and Development
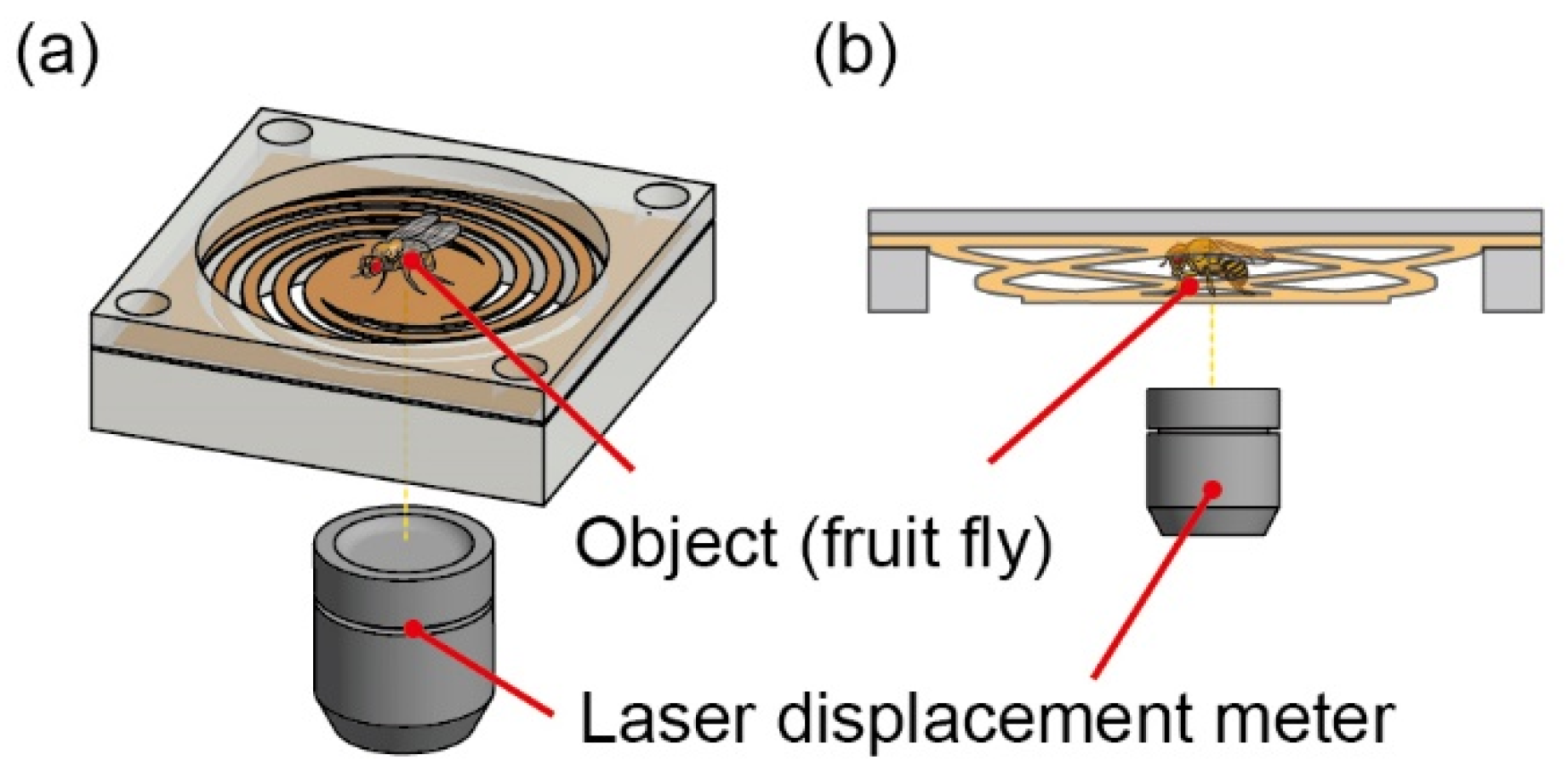
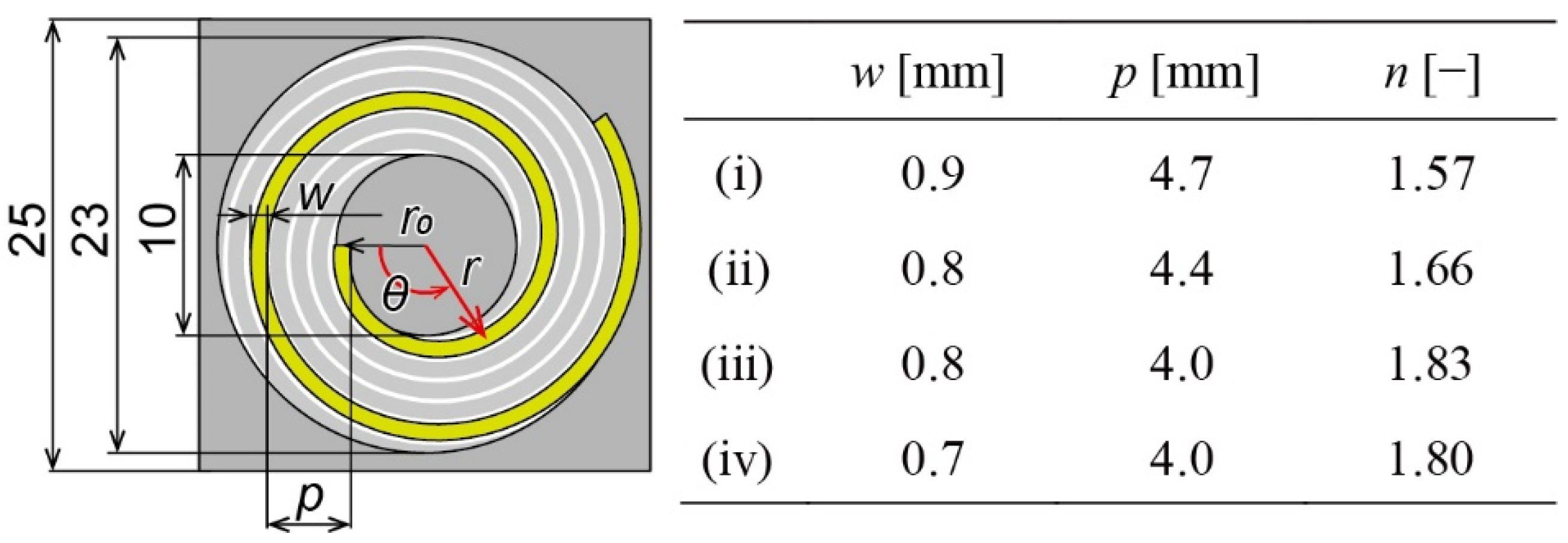
2.1. Design and Principle
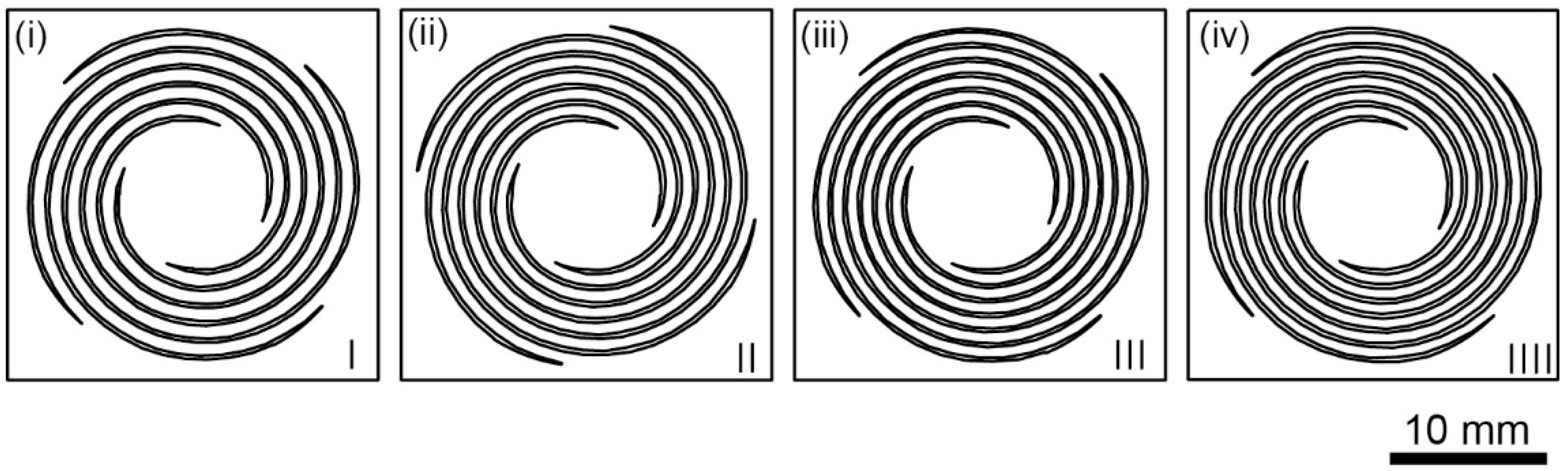
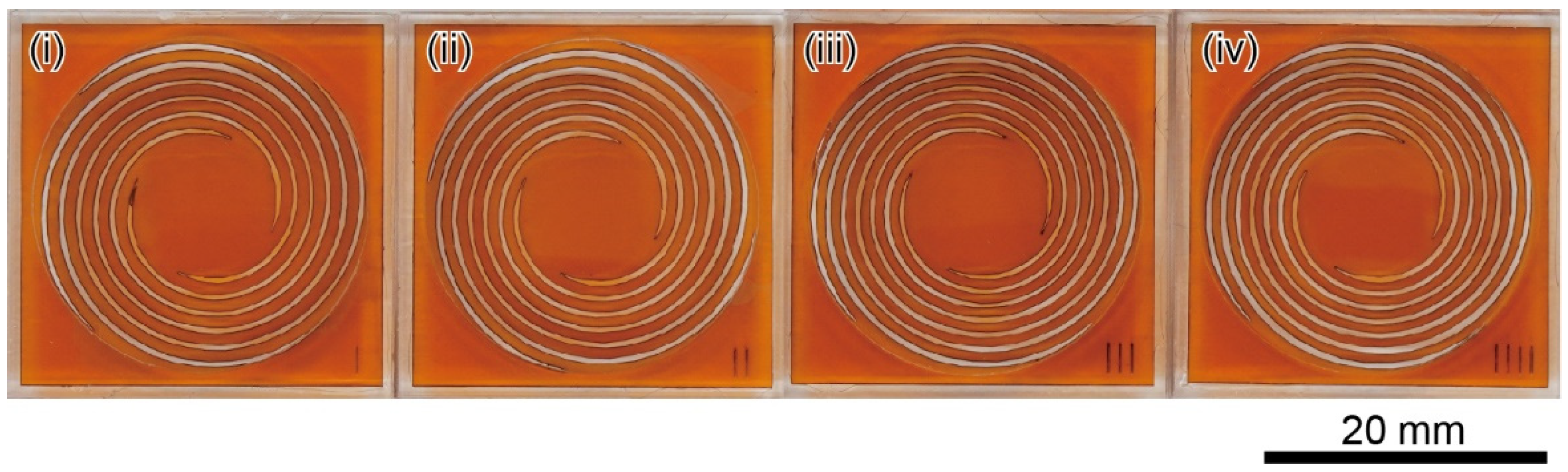
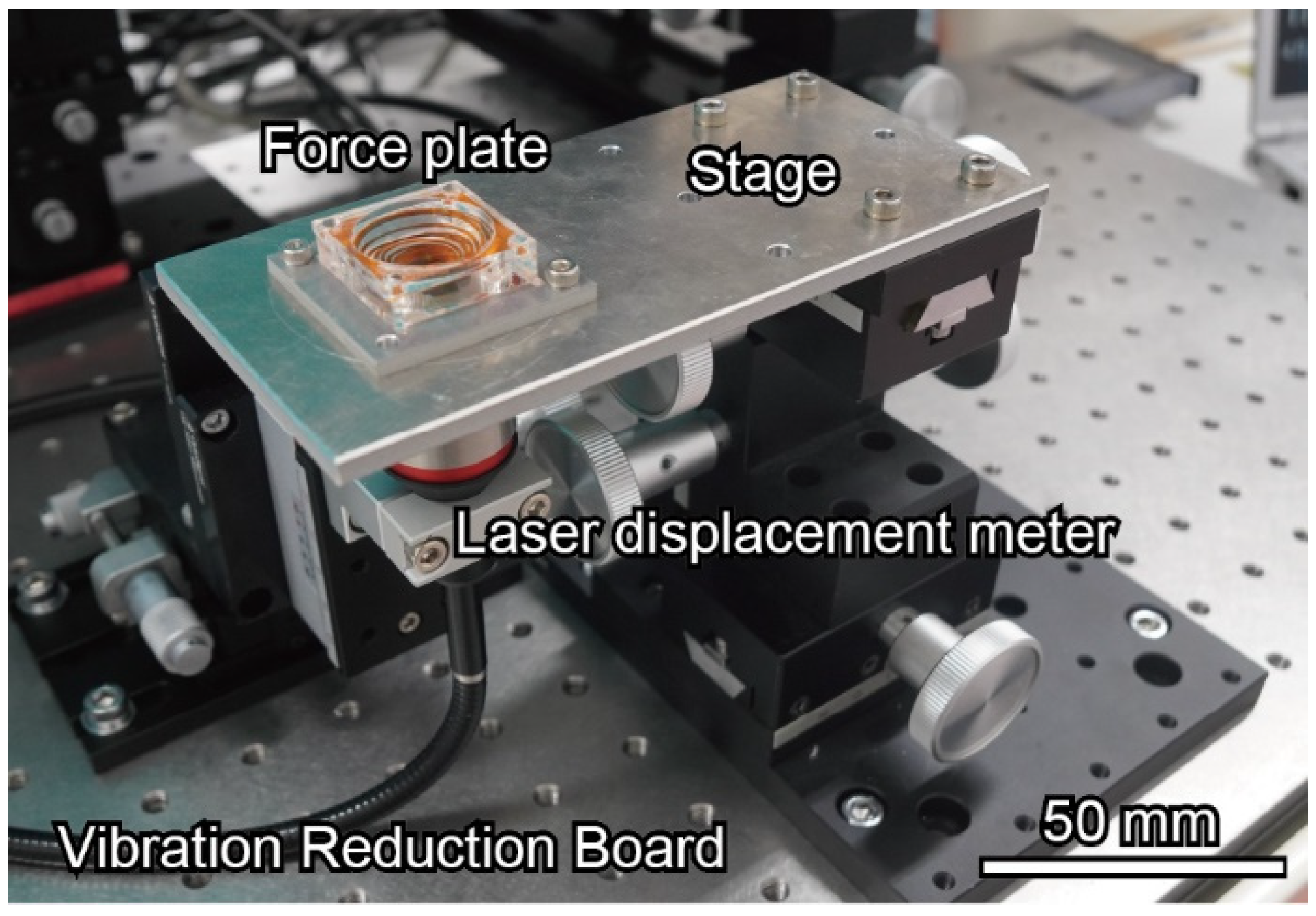
2.2. Fabrication
3. Experiment and Results
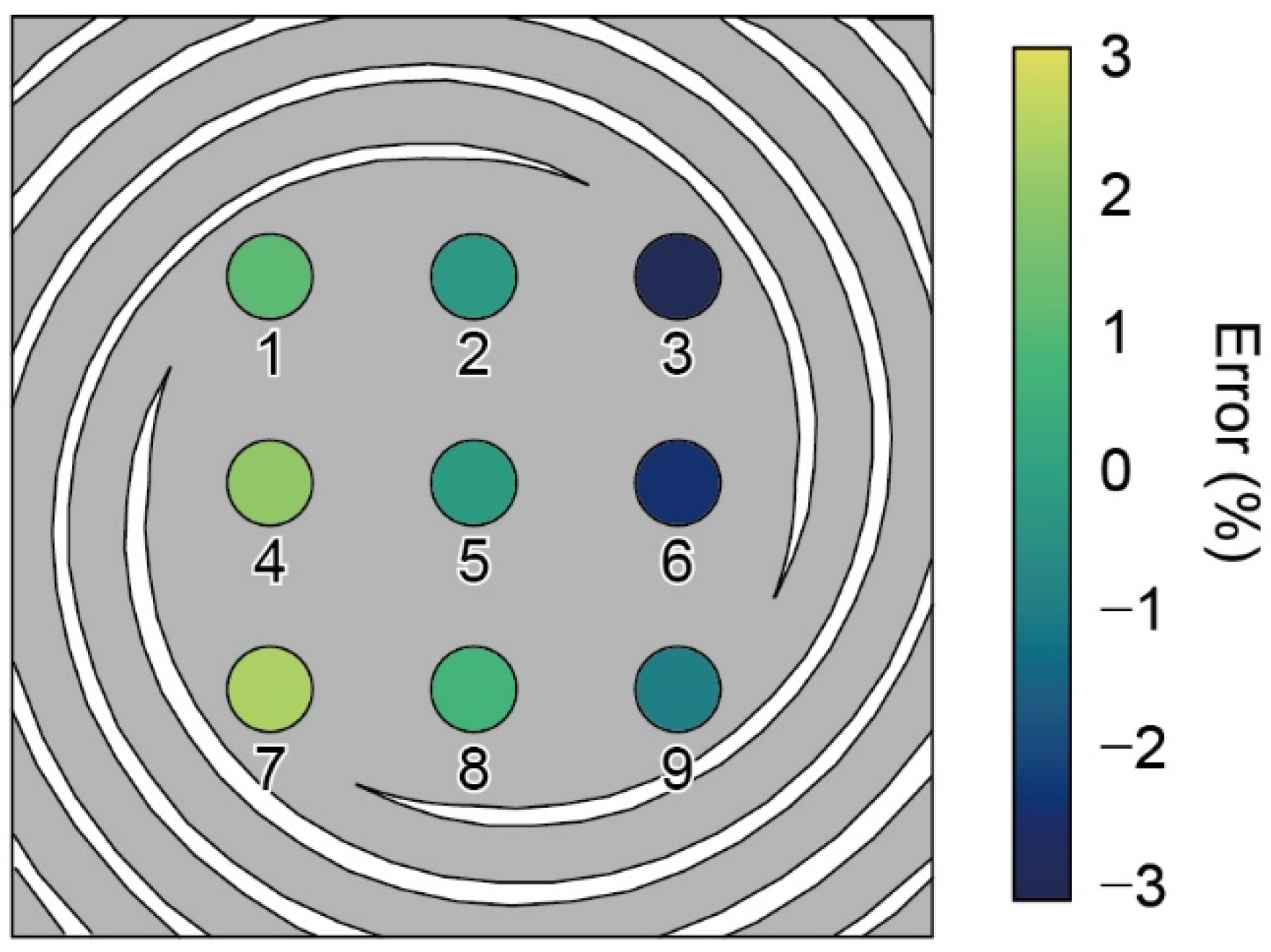
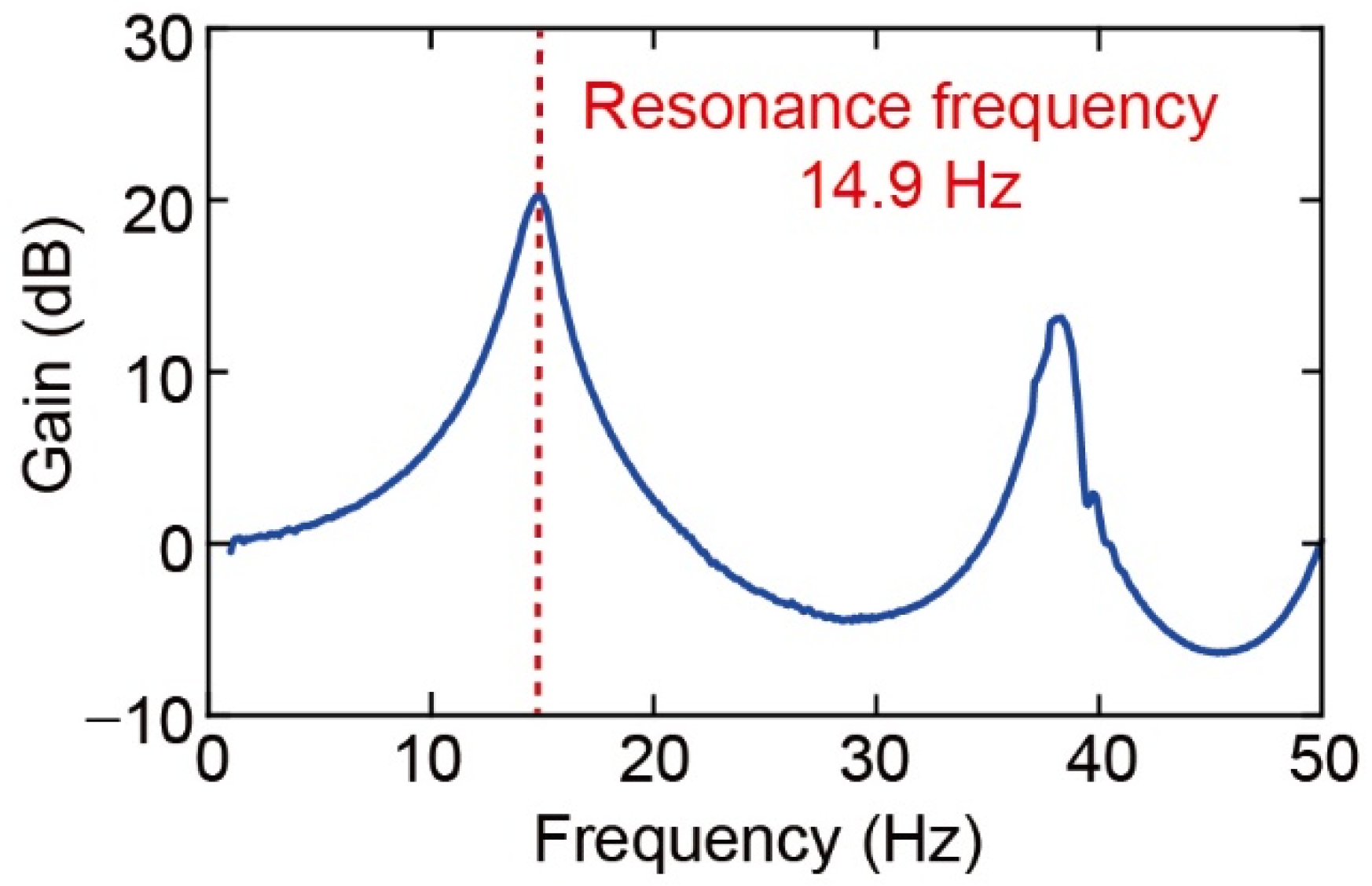
3.1. Calibration
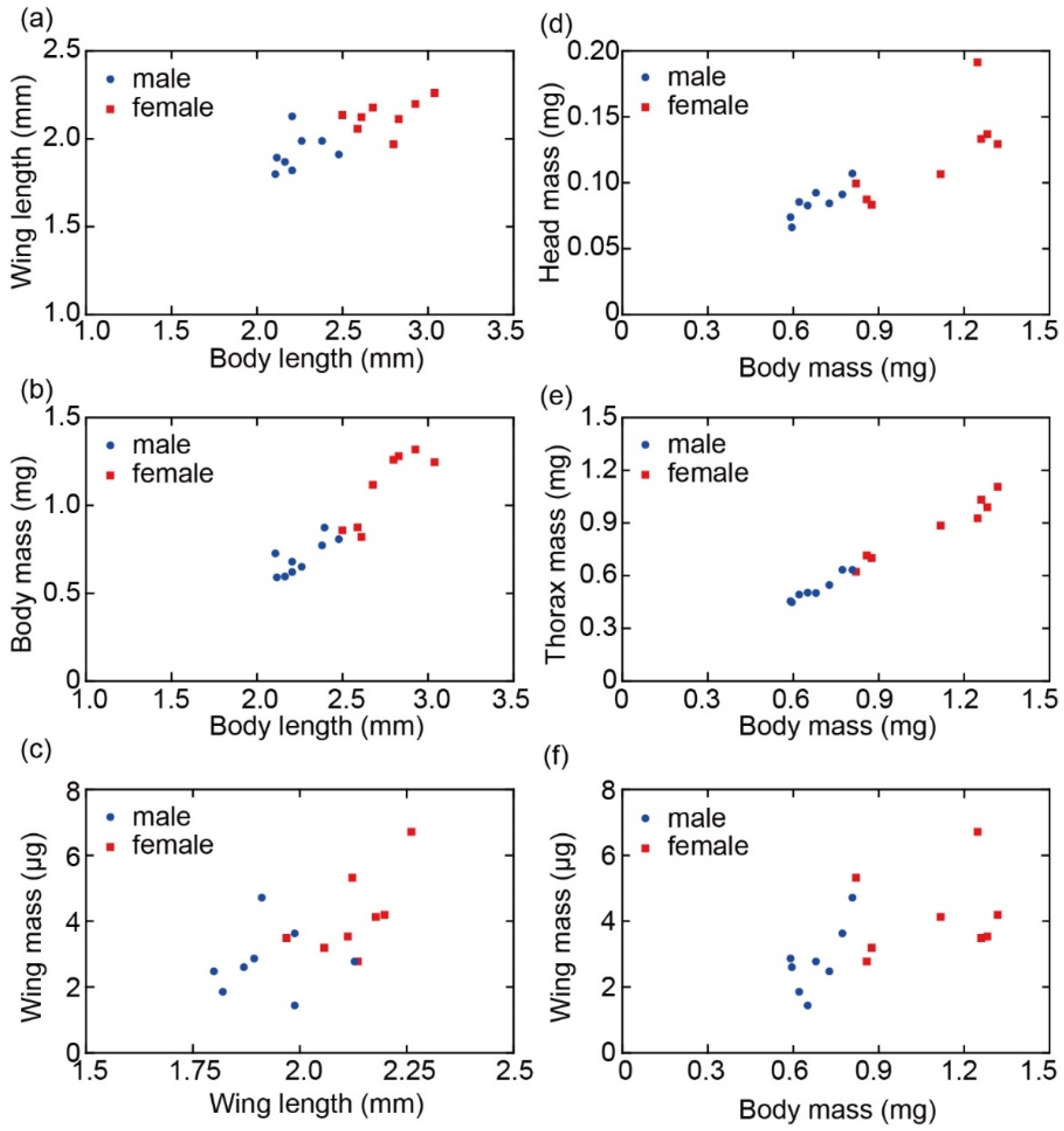
3.2. Measurement of Body Parts of Fruit Flies
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perez-Arancibia, N.O.; Duhamel, P.-E.J.; Ma, K.Y.; Wood, R.J. Model-free control of a flapping-wing flying microrobot. In Proceedings of the 2013 16th International Conference on Advanced Robotics (ICAR), Montevideo, Uruguay, 25–29 November 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, Z.; Hang, G.; Li, J.; Wang, Y.; Xiao, K. A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin. Sens. Actuators A Phys. 2008, 144, 354–360. [Google Scholar] [CrossRef]
- Guo, S.; Fukuda, T.; Asaka, K. A new type of fish-like underwater microrobot. IEEE/ASME Trans. Mechatron. 2003, 8, 136–141. [Google Scholar] [CrossRef]
- Erdem, E.Y.; Chen, Y.M.; Mohebbi, M.; Suh, J.W.; Kovacs, G.T.; Darling, R.B.; Böhringer, K.F. Thermally Actuated Omnidirectional Walking Microrobot. J. Microelectromech. Syst. 2010, 19, 433–442. [Google Scholar] [CrossRef]
- Takato, M.; Nakata, Y.; Uchiumi, Y.; Tanaka, T.; Saito, K.; Uchikoba, F. Thermal management of silicon micro robot driven by neural networks IC control SMA actuator. In Proceedings of the 2017 International Conference on Electronics Packaging (ICEP), Yamagata, Japan, 19–22 April 2017; pp. 193–198. [Google Scholar] [CrossRef]
- Takahashi, H.; Thanh-Vinh, N.; Jung, U.G.; Matsumoto, K.; Shimoyama, I. MEMS two-axis force plate array used to measure the ground reaction forces during the running motion of an ant. J. Micromech. Microeng. 2014, 24, 065014. [Google Scholar] [CrossRef]
- Bartsch, M.; Federle, W.; Full, R.; Kenny, T. A Multiaxis Force Sensor for the Study of Insect Biomechanics. J. Microelectromech. Syst. 2007, 16, 709–718. [Google Scholar] [CrossRef]
- Furuya, R.; Takahashi, H.; Vinh, N.T.; Yano, T.; Ito, K.; Takahata, T.; Matsumoto, K.; Shimoyama, I. Measurement of jumping force of a fruit fly using a mesa structured force plate. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 165–168. [Google Scholar] [CrossRef]
- Azuma, K.; Takahashi, H.; Kan, T.; Tanimura, J.; Ito, K.; Matsumoto, K.; Shimoyama, I. Quantitative evaluation of the influence of dopaminergic neuron on flapping locomotion. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 5–8. [Google Scholar] [CrossRef]
- Nasir, M.; Dickinson, M.; Liepmann, D. Multidirectional force and torque sensor for insect flight research. In Proceedings of the Digest of Technical Papers—International Conference on Solid State Sensors and Actuators and Microsystems, TRANSDUCERS ’05, Seoul, Korea, 5–9 June 2005; Volume 1, pp. 555–558. [Google Scholar] [CrossRef]
- Graetzel, C.F.; Fry, S.N.; Beyeler, F.; Sun, Y.; Nelson, B.J. Real-Time Microforce Sensors and High Speed Vision System for Insect Flight Control Analysis. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 39, pp. 451–460. [Google Scholar]
- Wu, D.; Yeo, K.; Lim, T. A numerical study on the free hovering flight of a model insect at low Reynolds number. Comput. Fluids 2014, 103, 234–261. [Google Scholar] [CrossRef]
- Roccia, B.A.; Preidikman, S.; Balachandran, B. Computational Dynamics of Flapping Wings in Hover Flight: A Co-Simulation Strategy. AIAA J. 2017, 55, 1806–1822. [Google Scholar] [CrossRef]
- Hino, H.; Inamuro, T. Turning flight simulations of a dragonfly-like flapping wing-body model by the immersed boundary-lattice Boltzmann method. Fluid Dyn. Res. 2018, 50, 65501. [Google Scholar] [CrossRef]
- Tanaka, F.; Ohmi, T.; Kuroda, S.; Hirasawa, K. Flight Control Study of an Virtual Insect by a Simulation. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 2006, 49, 556–561. [Google Scholar] [CrossRef] [Green Version]
- Okabe, K.; Noritake, H.; Moe, A.A.; Lee, G. Flapping mechanism based on biological characteristics of flapping in ladybirds. Proc. Dyn. Des. Conf. 2020, 219. [Google Scholar] [CrossRef]
- Yao, Y.; Yeo, K.S. Manoeuvring flight of a model insect—Saccadic yaw and sideslip. Comput. Fluids 2019, 180, 54–67. [Google Scholar] [CrossRef]
- Young, W.C.; Budynas, R. Roark’s Formulas for Stress and Strain, 7th ed.; McGraw-Hill Professional Publishing: New York, NY, USA, 2001. [Google Scholar]
- Sugimoto, T.; Kawasaki, Y.; Toda, H.; Takahashi, H. Measurement method of a microspring-supported force plate with an external laser displacement meter. Meas. Sci. Technol. 2022, 33, 105118. [Google Scholar] [CrossRef]
- Fry, S.N.; Sayaman, R.; Dickinson, M.H. The aerodynamics of hovering flight in Drosophila. J. Exp. Biol. 2005, 208, 2303–2318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lehmann, F.-O.; Dickinson, M.H. The changes in power requirements and muscle efficiency during elevated force production in the fruit fly Drosophila melanogaster. J. Exp. Biol. 1997, 200, 1133–1143. [Google Scholar] [CrossRef] [PubMed]
- Karan, D.; Morin, J.; Moreteau, B.; David, J. Body size and developmental temperature in drosophila melanogaster: Analysis of body weight reaction norm. J. Therm. Biol. 1998, 23, 301–309. [Google Scholar] [CrossRef]
- Chen, M.-Y.; Liu, H.-P.; Cheng, J.; Chiang, S.-Y.; Liao, W.-P.; Lin, W.-Y. Transgenerational impact of DEHP on body weight of Drosophila. Chemosphere 2019, 221, 493–499. [Google Scholar] [CrossRef] [PubMed]
- Jumbo-Lucioni, P.; Ayroles, J.F.; Chambers, M.M.; Jordan, K.W.; Leips, J.; Mackay, T.F.; De Luca, M. Systems genetics analysis of body weight and energy metabolism traits in Drosophila melanogaster. BMC Genom. 2010, 11, 297. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spring Constant (N/m) | Resonant Frequency (Hz) | |
|---|---|---|
| (i) | 0.320 | 16.57 |
| (ii) | 0.262 | 15.26 |
| (iii) | 0.221 | 13.87 |
| (iv) | 0.204 | 13.58 |
| Spring Constant (N/m) | Resonant Frequency (Hz) | |
|---|---|---|
| (i) | 0.329 | 18.4 |
| (ii) | 0.221 | 15.0 |
| (iii) | 0.208 | 14.3 |
| (iv) | 0.205 | 14.9 |
| Body Length (mm) | Wing Length (mm) | Body Mass (mg) | Head (mg) | Thorax/Abdomen (mg) | Wing (mg) | |
|---|---|---|---|---|---|---|
| Male | 2.26 | 1.92 | 0.702 | 0.0854 (12.55%) | 0.527 (77.32%) | 0.00279 (0.41%) |
| Female | 2.75 | 2.13 | 1.09 | 0.121 (10.97%) | 0.872 (79.50%) | 0.00417 (0.39%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shimazaki, K.; Sugimoto, T.; Toda, H.; Takahashi, H. A Polyimide Film-Based Simple Force Plate for Measuring the Body Mass of Tiny Insects. Sensors 2022, 22, 8352. https://doi.org/10.3390/s22218352
Shimazaki K, Sugimoto T, Toda H, Takahashi H. A Polyimide Film-Based Simple Force Plate for Measuring the Body Mass of Tiny Insects. Sensors. 2022; 22(21):8352. https://doi.org/10.3390/s22218352
Chicago/Turabian StyleShimazaki, Kenichiro, Takumi Sugimoto, Hirofumi Toda, and Hidetoshi Takahashi. 2022. "A Polyimide Film-Based Simple Force Plate for Measuring the Body Mass of Tiny Insects" Sensors 22, no. 21: 8352. https://doi.org/10.3390/s22218352