
Sprint Acceleration Mechanical Outputs Derived from Position– or Velocity–Time Data: A Multi-System Comparison Study

 , , , , ,
, , , , ,  and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Population
2.2. Protocol
2.2.1. Linear Encoder
2.2.2. Laser
2.2.3. Radar
2.2.4. GPS
2.2.5. Timing Gates
2.3. Data Processing
2.4. Statistics
3. Results
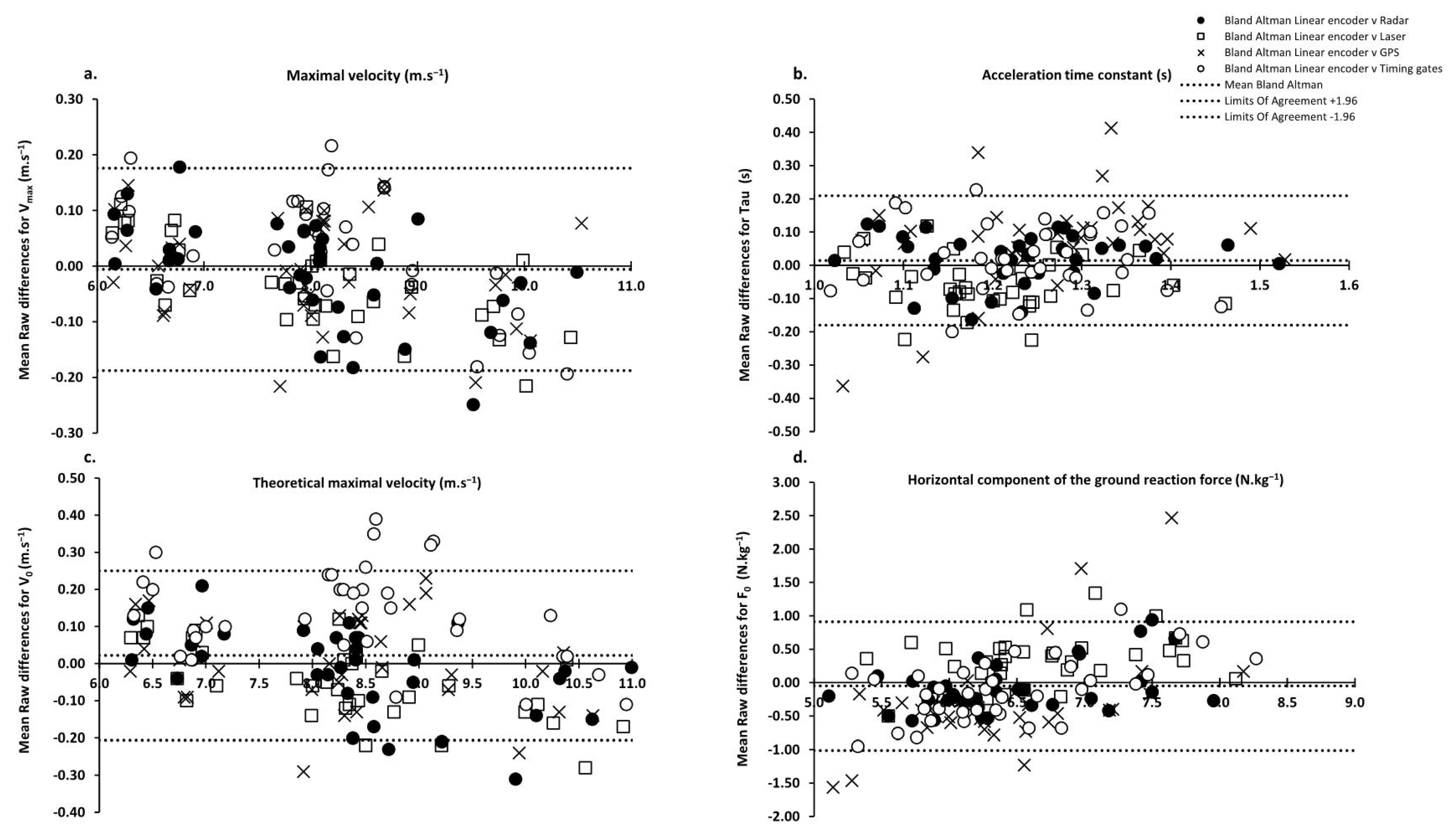
3.1. Inter-System Comparisons
3.2. Inter-Trial Comparisons
4. Discussion
4.1. Inter-System Comparisons
4.2. Inter-Trial Comparisons
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nagahara, R.; Mizutani, M.; Matsuo, A.; Kanehisa, H.; Fukunaga, T. Association of Sprint Performance with Ground Reaction Forces During Acceleration and Maximal Speed Phases in a Single Sprint. J. Appl. Biomech. 2017, 34, 104–110. [Google Scholar] [CrossRef]
- Rabita, G.; Dorel, S.; Slawinski, J.; Sàez-De-Villarreal, E.; Couturier, A.; Samozino, P.; Morin, J.-B. Sprint mechanics in world-class athletes: A new insight into the limits of human locomotion: Sprint Mechanics in Elite Athletes. Scand. J. Med. Sci. Sports 2015, 25, 583–594. [Google Scholar] [CrossRef]
- Schache, A.G.; Lai, A.K.M.; Brown, N.A.T.; Crossley, K.M.; Pandy, M.G. Lower-limb joint mechanics during maximum acceleration sprinting. J. Exp. Biol. 2019, 222, jeb209460. [Google Scholar] [CrossRef]
- Morin, J.-B.; Samozino, P.; Murata, M.; Cross, M.R.; Nagahara, R. A simple method for computing sprint acceleration kinetics from running velocity data: Replication study with improved design. J. Biomech. 2019, 94, 82–87. [Google Scholar] [CrossRef]
- Samozino, P.; Rabita, G.; Dorel, S.; Slawinski, J.; Peyrot, N.; de Villarreal, E.S.; Morin, J.-B. A simple method for measuring power, force, velocity properties, and mechanical effectiveness in sprint running. Scand. J. Med. Sci. Sports 2016, 26, 648–658. [Google Scholar] [CrossRef]
- Baena-Raya, A.; García-Mateo, P.; García-Ramos, A.; Rodríguez-Pérez, M.A.; Soriano-Maldonado, A. Delineating the potential of the vertical and horizontal force-velocity profile for optimizing sport performance: A systematic review. J. Sports Sci. 2021, 40, 331–344. [Google Scholar] [CrossRef]
- Slawinski, J.; Termoz, N.; Rabita, G.; Guilhem, G.; Dorel, S.; Morin, J.-B.; Samozino, P. How 100-m event analyses improve our understanding of world-class men’s and women’s sprint performance. Scand. J. Med. Sci. Sports 2017, 27, 45–54. [Google Scholar] [CrossRef]
- Watkins, C.M.; Storey, A.; McGuigan, M.R.; Downes, P.; Gill, N.D. Horizontal Force-Velocity-Power Profiling of Rugby Players: A Cross-Sectional Analysis of Competition-Level and Position-Specific Movement Demands. J. Strength Cond. Res. 2021, 35, 1576–1585. [Google Scholar] [CrossRef]
- Best, C.H.; Partridge, R.C. The equation of motion of a runner, exerting a maximal effort. Proc. R. Soc. Lond. Ser. B Boil. Sci. 1928, 103, 218–225. [Google Scholar] [CrossRef]
- Eriksrud, O.; Ahlbeck, F.; Harper, D.; Gløersen, Ø. Validity of Velocity Measurements of a Motorized Resistance Device During Change of Direction. Front. Physiol. 2022, 13, 824606. [Google Scholar] [CrossRef]
- Volkov, N.I.; Lapin, V.I. Analysis of the velocity curve in sprint running. Med. Sci. Sports 1979, 11, 332–337. [Google Scholar] [CrossRef]
- Simperingham, K.D.; Cronin, J.B.; Ross, A.A. Advances in Sprint Acceleration Profiling for Field-Based Team-Sport Athletes: Utility, Reliability, Validity and Limitations. Sports Med. 2016, 46, 1619–1645. [Google Scholar] [CrossRef]
- Harrison, A.J.; Bourke, G. The effect of resisted sprint training on speed and strength performance in male rugby players. J. Strength Cond. Res. 2009, 23, 275–283. [Google Scholar] [CrossRef]
- Chelly, S.M.; Denis, C. Leg power and hopping stiffness: Relationship with sprint running performance. Med. Sci. Sports Exerc. 2001, 33, 326–333. [Google Scholar] [CrossRef]
- Hoppe, M.W.; Baumgart, C.; Polglaze, T.; Freiwald, J. Validity and reliability of GPS and LPS for measuring distances covered and sprint mechanical properties in team sports. PLoS ONE 2018, 13, e0192708. [Google Scholar] [CrossRef]
- Lacome, M.; Peeters, A.; Mathieu, B.; Marrier, B.; Carling, C.; Piscione, J. Can we use GPS for assessing sprinting performance in rugby sevens? A concurrent validity and between-device reliability study. Biol. Sport 2019, 36, 25–29. [Google Scholar] [CrossRef]
- Haugen, T.; Buchheit, M. Sprint Running Performance Monitoring: Methodological and Practical Considerations. Sports Med. 2016, 46, 641–656. [Google Scholar] [CrossRef]
- Cross, M.R.; Lahti, J.; Brown, S.R.; Chedati, M.; Jimenez-Reyes, P.; Samozino, P.; Eriksrud, O.; Morin, J.-B. Training at maximal power in resisted sprinting: Optimal load determination methodology and pilot results in team sport athletes. PLoS ONE 2018, 13, e0195477. [Google Scholar] [CrossRef]
- Ghigiarelli, J.J.; Ferrara, K.J.; Poblete, K.M.; Valle, C.F.; Gonzalez, A.M.; Sell, K.M. Level of Agreement, Reliability, and Minimal Detectable Change of the MusclelabTM Laser Speed Device on Force–Velocity–Power Sprint Profiles in Division II Collegiate Athletes. Sports 2022, 10, 57. [Google Scholar] [CrossRef]
- Mendiguchia, J.; Samozino, P.; Martinez-Ruiz, E.; Brughelli, M.; Schmikli, S.; Morin, J.-B.; Mendez-Villanueva, A. Progression of Mechanical Properties during On-field Sprint Running after Returning to Sports from a Hamstring Muscle Injury in Soccer Players. Endoscopy 2014, 35, 690–695. [Google Scholar] [CrossRef]
- Clavel, P.; Leduc, C.; Morin, J.-B.; Owen, C.; Samozino, P.; Peeters, A.; Buchheit, M.; Lacome, M. Concurrent Validity and Reliability of Sprinting Force–Velocity Profile Assessed with GPS Devices in Elite Athletes. Int. J. Sports Physiol. Perform. 2022, 17, 1527–1531. [Google Scholar] [CrossRef]
- Romero-Franco, N.; Jiménez-Reyes, P.; Castaño-Zambudio, A.; Capelo-Ramírez, F.; Rodríguez-Juan, J.J.; González-Hernández, J.; Toscano-Bendala, F.J.; Cuadrado-Peñafiel, V.; Balsalobre-Fernández, C. Sprint performance and mechanical outputs computed with an iPhone app: Comparison with existing reference methods. Eur. J. Sport Sci. 2017, 17, 386–392. [Google Scholar] [CrossRef]
- Malone, J.J.; Lovell, R.; Varley, M.C.; Coutts, A.J. Unpacking the Black Box: Applications and Considerations for Using GPS Devices in Sport. Int. J. Sports Physiol. Perform. 2017, 12, 18–26. [Google Scholar] [CrossRef]
- Bland, J.M.; Altman, D.G. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Hopkins, W.G. Measures of Reliability in Sports Medicine and Science. Sports Med. 2000, 30, 1–15. [Google Scholar] [CrossRef]
- di Prampero, P.E.; Fusi, S.; Sepulcri, L.; Morin, J.-B.; Belli, A.; Antonutto, G. Sprint running: A new energetic approach. J. Exp. Biol. 2005, 208, 2809–2816. [Google Scholar] [CrossRef]
- Furusawa, K.; Hill, A.V.; Parkinson, J.L. The dynamics of “sprint” running. Proc. R. Soc. London. Ser. B Boil. Sci. 1927, 102, 29–42. [Google Scholar] [CrossRef]
- Komino, P.; Mat, Y.L.; Zadro, I.; Osgnach, C.; Morin, J.-B. Sprint Acceleration Mechanical Outputs: Direct Comparison between GPEXE Pro2 and 1080 Sprint Devices. Sport Peformance Sci. Rep. 2022, 163. [Google Scholar]
- Lacome, M.; Owen, C.; Peeters, A.; Piscione, J.; Le Meur, Y.; Leduc, C. Force Velocity with GPS: Is It Reliable? Sport Peformance Sci. Rep. 2020, 115. [Google Scholar]
- Rakovic, E.; Paulsen, G.; Helland, C.; Haugen, T.; Eriksrud, O. Validity and Reliability of a Motorized Sprint Resistance Device. J. Strength Cond. Res. 2022, 36, 2335–2338. [Google Scholar] [CrossRef]
- Stenroth, L.; Vartiainen, P.; Karjalainen, P.A. Force-velocity profiling in ice hockey skating: Reliability and validity of a simple, low-cost field method. Sports Biomech. 2020, 2020, 1–16. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Vmax (m.s−1) | Tau (s) | V0 (m.s−1) | F0 (N.kg−1) | |
|---|---|---|---|---|
| Linear encoder | 8.02 ± 1.20 (6.11–10.50) 15.0% | 1.22 ± 0.12 (1.00–1.52) 9.4% | 8.31 ± 1.30 (6.26–11.00) 15.7% | 6.48 ± 0.62 (5.21–8.09) 9.6% |
| Laser | 7.99 ± 1.15 (6.17–10.37) 14.4% | 1.17 ± 0.11 (0.99–1.40) 9.0% | 8.27 ± 1.24 (6.33–10.83) 15.0% | 6.77 ± 0.77 (5.30–8.15) 11.4% |
| Radar | 8.00 ± 1.15 (6.17–10.49) 14.4% | 1.24 ± 0.12 (1.03–1.52) 9.4% | 8.30 ± 1.24 (6.31–10.99) 15.0% | 6.40 ± 0.78 (5.01–8.00) 12.3% |
| GPS | 8.02 ± 1.18 (6.14–10.57) 14.7% | 1.29 ± 0.16 (0.85–1.55) 12.3% | 8.33 ± 1.28 (6.28–11.09) 15.4% | 6.18 ± 0.96 (4.36–8.88) 15.6% |
| Timing gates | 8.04 ± 1.15 (6.16–10.30) 14.3% | 1.25 ± 0.11 (0.98–1.45) 8.9% | 8.45 ± 1.27 (6.39–10.89) 15.0% | 6.38 ± 0.87 (4.85–8.45) 13.7% |
| (a) | ||||||
|---|---|---|---|---|---|---|
| Linear Encoder | Laser | Radar | GPS | Timing Gates | ||
| Linear encoder | −0.055 ± 0.079 (−0.210; 0.100) | 0.018 ± 0.077 (−0.133; 0.169) | 0.072 ± 0.140 (−0.203; 0.346) | 0.025 ± 0.101 (−0.147; 0.223) | Tau (s) | |
| Laser | −0.031 ± 0.080 (−0.187; 0.125) | −0.072 ± 0.077 (−0.224; 0.079) | 0.126 ± 0.135 (−0.139; 0.391) | 0.079 ± 0.095 (−0.108; 0.267) | ||
| Radar | −0.014 ± 0.093 (−0.196; 0.167) | −0.017 ± 0.078 (−0.169; 0.136) | 0.054 ± 0.148 (−0.235; 0.343) | 0.007 ± 0.096 (−0.181; 0.195) | ||
| GPS | −0.003 ± 0.096 (−0.191; 0.186) | 0.028 ± 0.104 (−0.177; 0.233) | 0.012 ± 0.100 (−0.184; 0.207) | −0.047 ± 0.167 (−0.374; 0.280) | ||
| Timing gates | 0.025 ± 0.103 (−0.177; 0.226) | 0.056 ± 0.097 (−0.135; 0.246) | 0.039 ± 0.100 (−0.156; 0.234) | 0.027 ± 0.107 (−0.182; 0.237) | ||
| Vmax (m.s−1) | ||||||
| (b) | ||||||
| Linear Encoder | Laser | Radar | GPS | Timing Gates | ||
| Linear encoder | 0.294 ± 0.397 (−0.485; 1.072) | −0.086 ± 0.375 (−0.820; 0.649) | −0.299 ± 0.729 (−1.729; 1.131) | −0.104 ± 0.462 (−1.009; 0.800) | F0 (N.kg−1) | |
| Laser | −0.047 ± 0.102 (−0.246; 0.153) | 0.379 ± 0.393 (−0.391; 1.150) | −0.593 ± 0.677 (−1.919; 0.733) | −0.398 ± 0.475 (−1.329; 0.533) | ||
| Radar | −0.013 ± 0.116 (−0.239; 0.214) | −0.034 ± 0.099 (−0.228; 0.160) | −0.214 ± 0.791 (−1.764; 1.337) | −0.019 ± 0.460 (−0.920; 0.882) | ||
| GPS | 0.012 ± 0.122 (−0.227; 0.252) | 0.059 ± 0.135 (−0.206; 0.323) | 0.025 ± 0.132 (−0.234; 0.284) | 0.195 ± 0.857 (−1.484; 1.874) | ||
| Timing gates | 0.137 ± 0.126 (−0.110; 0.384) | 0.183 ± 0.133 (−0.078; 0.445) | 0.149 ± 0.134 (−0.114; 0.413) | 0.124 ± 0.141 (−0.152; 0.400) | ||
| V0 (m.s−1) | ||||||
| CV Inter Trial Mean ± SD (%) | Change in the Mean ± SEM | |||||||
|---|---|---|---|---|---|---|---|---|
| Vmax (%) | Tau (%) | V0 (%) | F0 (%) | Vmax (m.s−1) | Tau (s) | V0 (m.s−1) | F0 (N.kg−1) | |
| Linear encoder | 1.13 ± 0.98 | 4.52 ± 3.04 | 1.25 ± 1.13 | 3.84 ± 2.85 | 0.04 ± 0.13 0.5 ± 1.6% | −0.04 ± 0.06 −3.0 ± 5.2% | 0.04 ± 0.16 0.5 ± 1.9% | 0.21 ± 0.27 3.3 ± 4.2% |
| Laser smooth | 1.11 ± 0.77 | 4.58 ± 3.33 | 1.26 ± 0.79 | 4.11 ± 3.37 | 0.05 ± 0.11 0.6 ± 1.4% | −0.03 ± 0.06 −2.6 ± 5.5% | 0.05 ± 0.13 0.6 ± 1.6% | 0.20 ± 0.33 3.0 ± 4.9% |
| Radar | 1.37 ± 0.94 | 5.00 ± 4.27 | 1.52 ± 1.06 | 4.32 ± 3.93 | 0.08 ± 0.13 1.0 ± 1.7% | −0.01 ± 0.08 −0.9 ± 6.5% | 0.09 ± 0.16 1.0 ± 1.9% | 0.09 ± 0.39 1.4 ± 6.1% |
| GPS smooth | 1.47 ± 1.40 | 5.74 ± 3.98 | 1.63 ± 1.57 | 5.64 ± 5.89 | 0.07 ± 0.18 0.9 ± 2.2% | 0.03 ± 0.09 2.0 ± 6.7% | 0.08 ± 0.20 1.0 ± 2.5% | −0.06 ± 0.40 −1.1 ± 6.4% |
| Timing gates | 1.31 ± 1.00 | 5.09 ± 2.06 | 1.47 ± 1.12 | 4.20 ± 2.68 | 0.04 ± 0.14 0.5 ± 1.7% | −0.04 ± 0.06 −3.5 ± 4.9% | 0.03 ± 0.16 0.4 ± 1.9% | 0.23 ± 0.29 3.6 ± 4.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fornasier-Santos, C.; Arnould, A.; Jusseaume, J.; Millot, B.; Guilhem, G.; Couturier, A.; Samozino, P.; Slawinski, J.; Morin, J.-B. Sprint Acceleration Mechanical Outputs Derived from Position– or Velocity–Time Data: A Multi-System Comparison Study. Sensors 2022, 22, 8610. https://doi.org/10.3390/s22228610
Fornasier-Santos C, Arnould A, Jusseaume J, Millot B, Guilhem G, Couturier A, Samozino P, Slawinski J, Morin J-B. Sprint Acceleration Mechanical Outputs Derived from Position– or Velocity–Time Data: A Multi-System Comparison Study. Sensors. 2022; 22(22):8610. https://doi.org/10.3390/s22228610
Chicago/Turabian StyleFornasier-Santos, Charly, Axelle Arnould, Jérémy Jusseaume, Benjamin Millot, Gaël Guilhem, Antoine Couturier, Pierre Samozino, Jean Slawinski, and Jean-Benoît Morin. 2022. "Sprint Acceleration Mechanical Outputs Derived from Position– or Velocity–Time Data: A Multi-System Comparison Study" Sensors 22, no. 22: 8610. https://doi.org/10.3390/s22228610
APA StyleFornasier-Santos, C., Arnould, A., Jusseaume, J., Millot, B., Guilhem, G., Couturier, A., Samozino, P., Slawinski, J., & Morin, J.-B. (2022). Sprint Acceleration Mechanical Outputs Derived from Position– or Velocity–Time Data: A Multi-System Comparison Study. Sensors, 22(22), 8610. https://doi.org/10.3390/s22228610