
Energy-Efficient Trajectory Planning for Smart Sensing in IoT Networks Using Quadrotor UAVs


Abstract
:1. Introduction
- 1.
- The energy-consumption model is applicable to an arbitrary trajectory that is both physically and dynamically feasible in three-dimensional space.
- 2.
- The energy-consumption model considers the four blades of quadrotor UAVs as the fundamental energy-consumption sources, rather than the single blade of helicopters.
- 3.
- The energy-consumption model comprehensively takes UAV dynamics, BLDC motor dynamics, and the influence of aerodynamics into account.
- 4.
- An energy-optimized, smooth, physically and dynamically feasible trajectory combined with Dubins curve is proposed in a UAV-assisted communication network.
2. Derivation of the Energy-Consumption Model
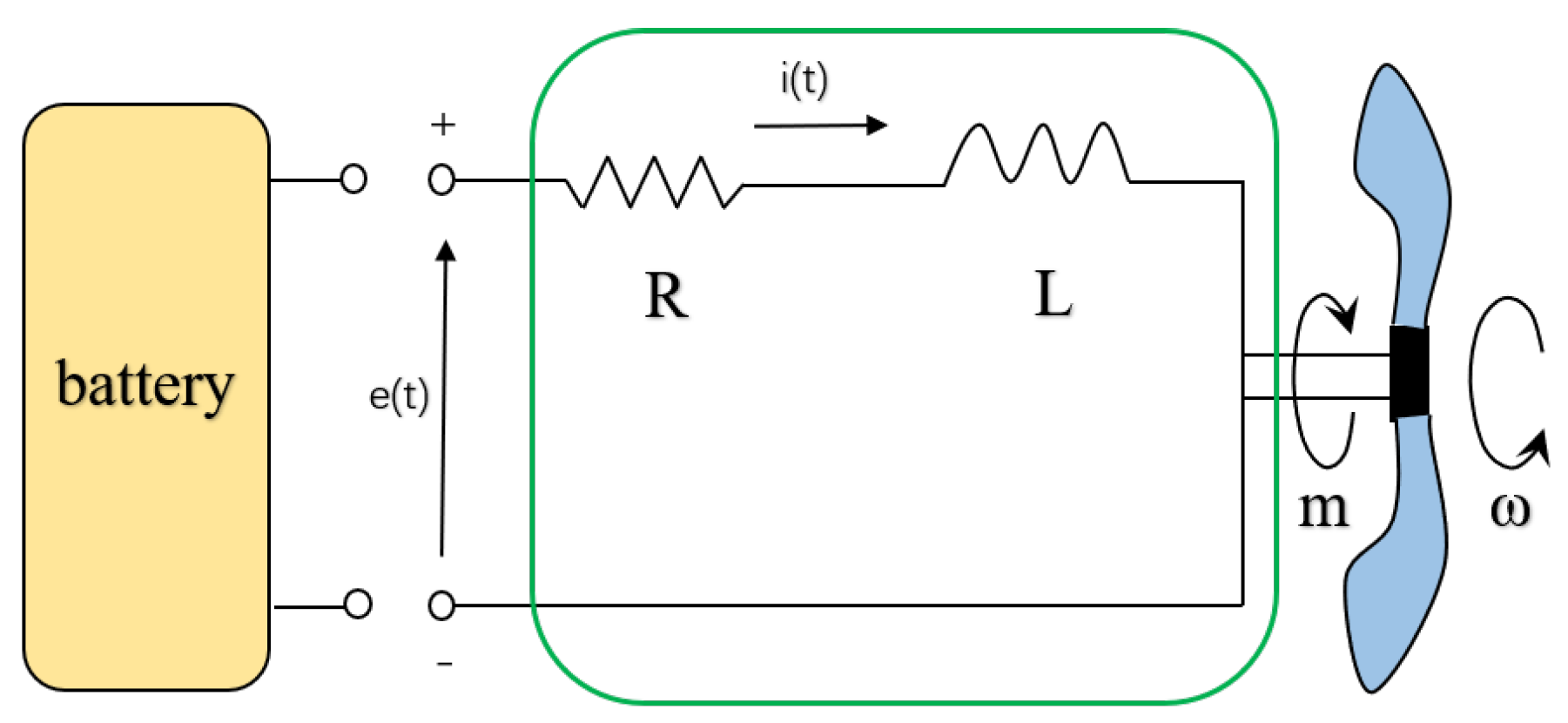
2.1. BLDC-Motor-Dynamic Model
2.2. Dynamic Model of Quadrotor UAV
2.3. Trajectory and Force
2.3.1. The Expression of
2.3.2. The Expression of
2.3.3. The Expression of
2.4. Thrust Coefficient and Torque Coefficient
2.5. Energy-Consumption Calculation Algorithm
| Algorithm 1 Trajectory-based quadrotor UAV’s energy-consumption calculation. |
| 1: Input: and the parameters listed in Table 1. 2: Solve for and using (10) and (11). 3: Solve for and using (30)(31) or (32)(35). 4: Substitute , , and into (38) to obtain . 5: Substitute into (3) and (4) to obtain p and E. 6: Output: p and E. |
3. Trajectory Study
3.1. Linear Trajectory
3.2. Circular Trajectory
4. Energy-Optimized Trajectory Planning for Mobile-Communication Network
4.1. System Model
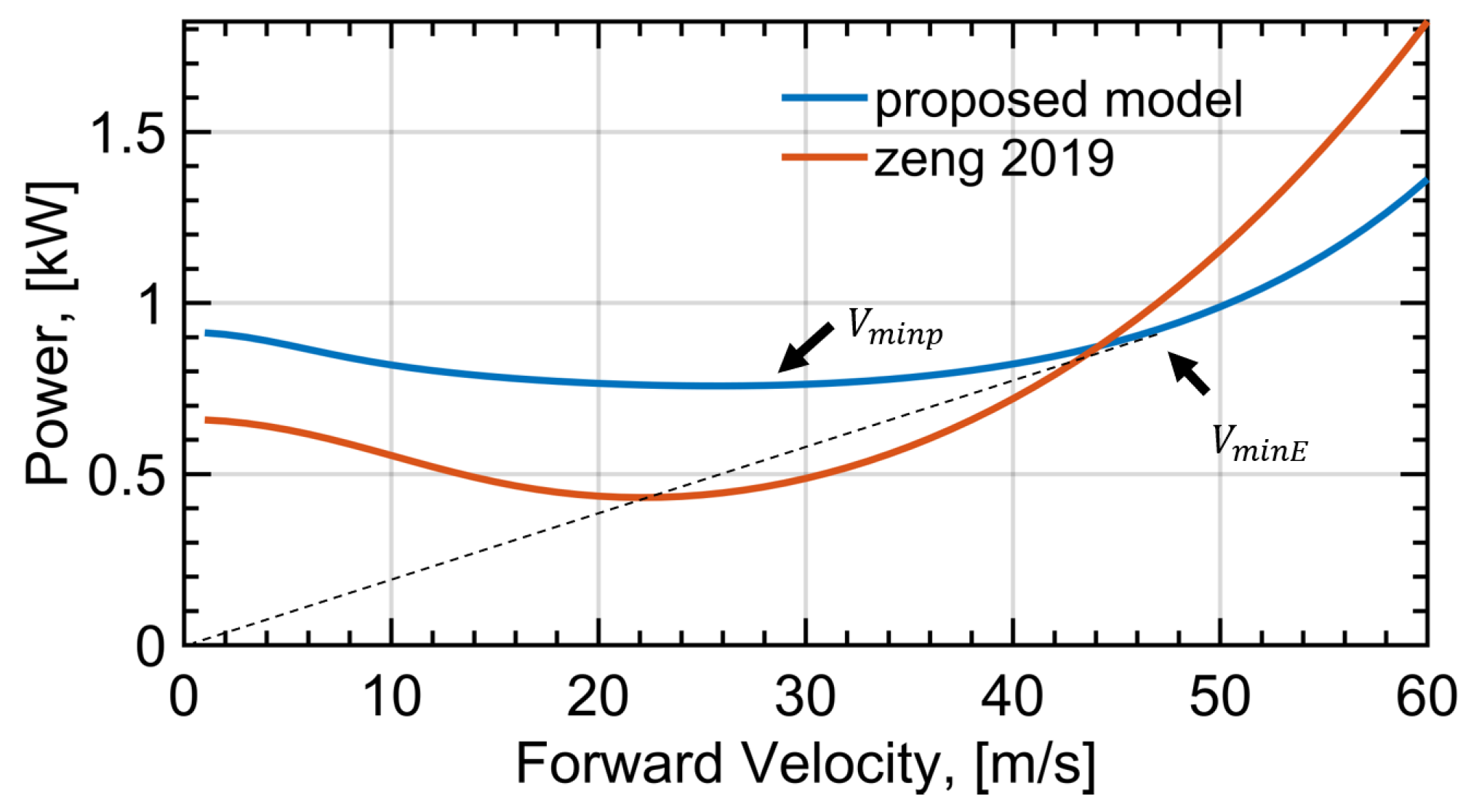
4.2. Comparison between Circular and Hover Flight
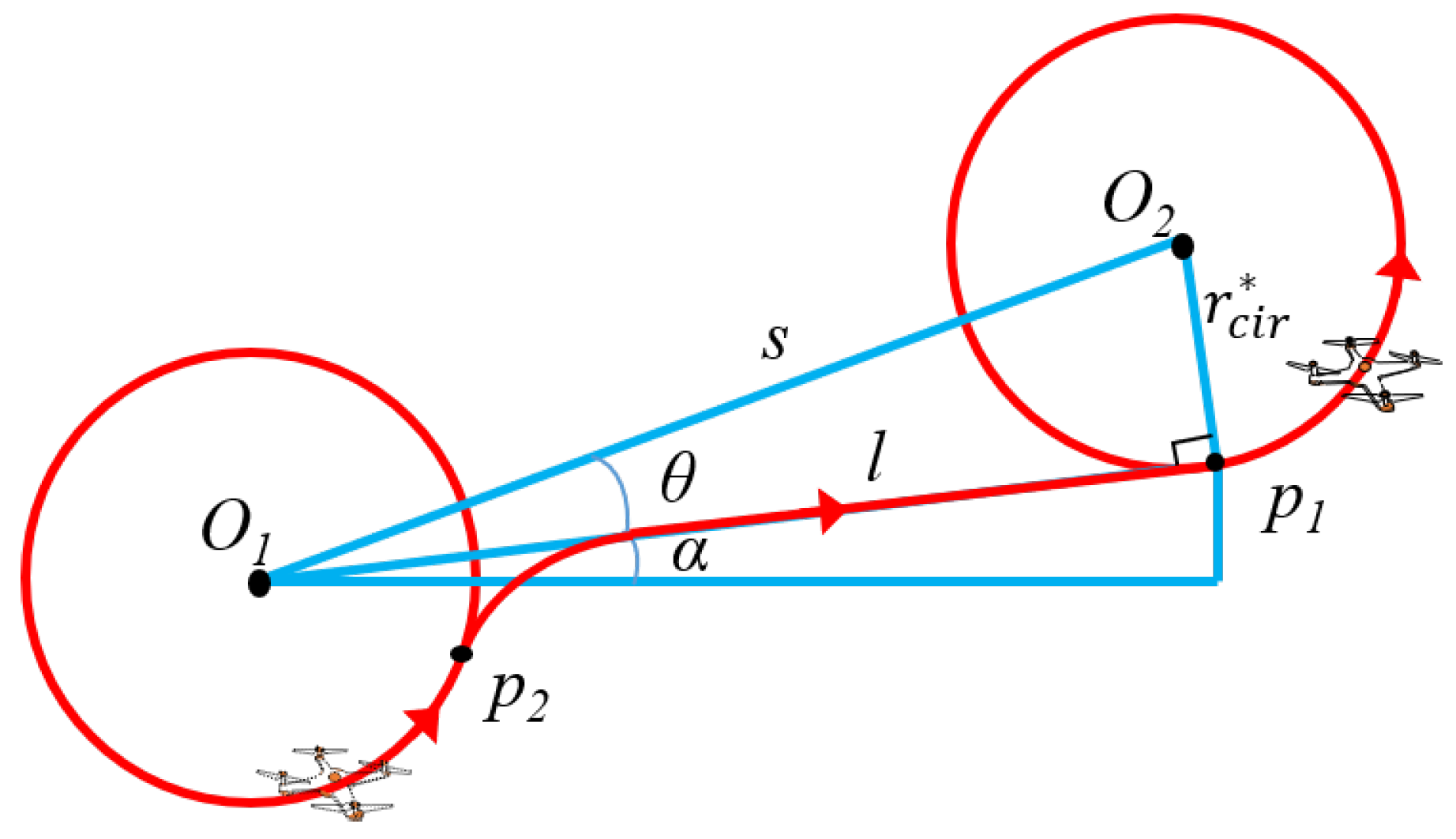
4.3. Trajectory Planning
| Algorithm 2 Energy-optimized trajectory planning algorithm. |
| 1: Input: IoT user locations , data amount , and the parameters listed in Table 1 and Table 2. 2: Apply TSP algorithm to acquire the optimal visiting order . 3: Solve and numerically for the circular trejectory, and choose for the linear trajectory. 4: for 5: Solve and of the circular trajectory centered on IoT user() using (45)–(48). 6: Connect of IoT user() and of IoT user() by applying Dubins-curve algorithm. 7: end for 8: Output: energy-optimized UAV trajectory. |
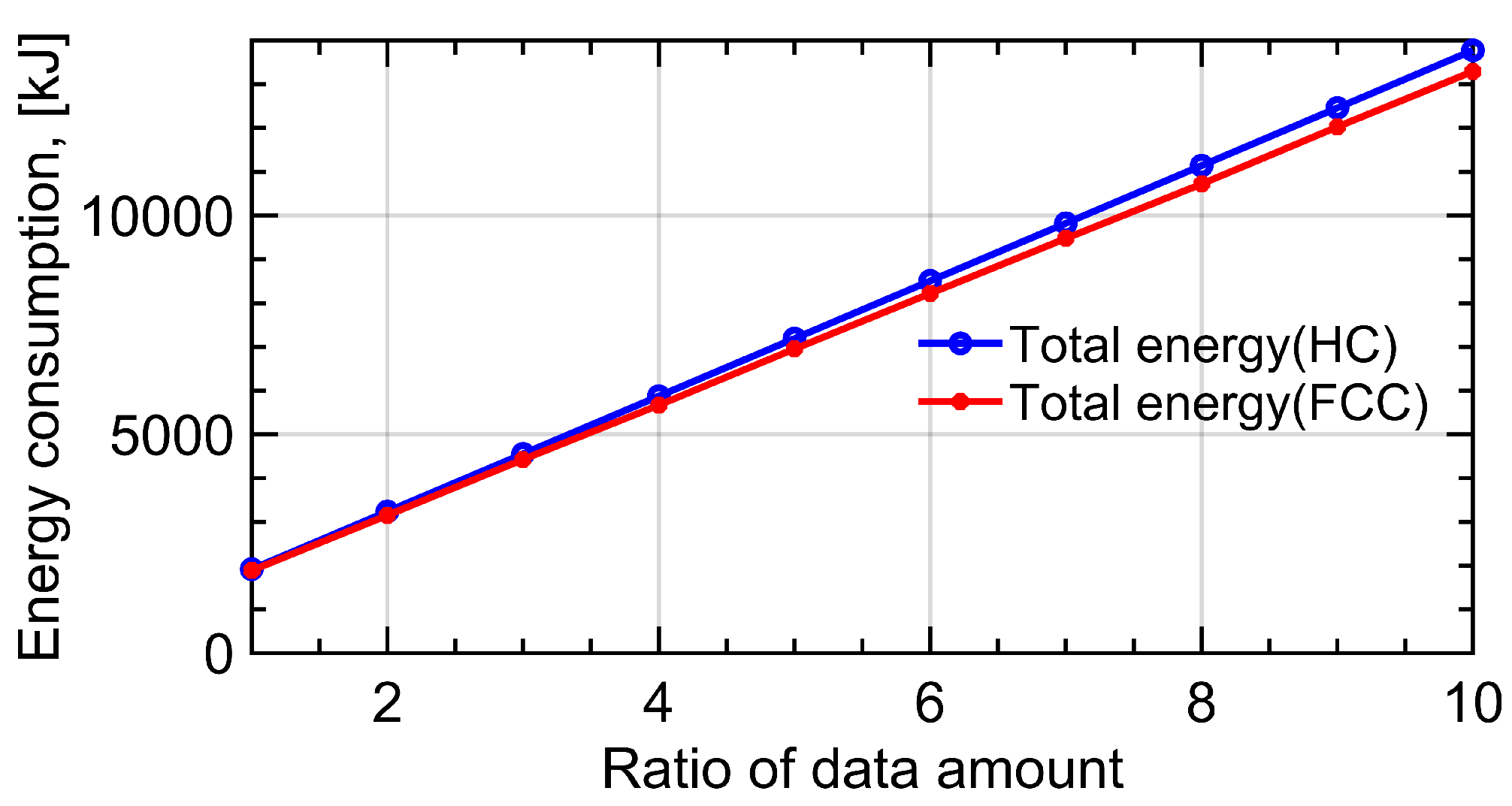
4.4. Application Studies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAVs | Unmanned aerial vehicles |
| IoT | Internet of Things |
| BLDC | Brushless direct current |
| FCC | Fly–circle–communicate |
| HC | Hovering-communication |
| TSP | Travelling salesman problem |
| FHC | Fly-hover-communication |
| FAC | Flying-and-communication |
Appendix A
Appendix A.1. Rotor Aerodynamic in Forward Flight
Appendix A.2. Rotor Aerodynamics in Axial Flight
References
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutorials 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Sony, S.; Laventure, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. Struct. Control. Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2022, 18, 100187. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, N.; Wang, M. Wireless sensors in agriculture and food industry—Recent development and future perspective. Comput. Electron. Agric. 2006, 50, 1–14. [Google Scholar] [CrossRef]
- Anisi, M.H.; Abdul-Salaam, G.; Abdullah, A.H. A survey of wireless sensor network approaches and their energy consumption for monitoring farm fields in precision agriculture. Precis. Agric. 2015, 16, 216–238. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Wu, Q.; Zeng, Y.; Zhang, R. Energy tradeoff in ground-to-UAV communication via trajectory design. IEEE Trans. Veh. Technol. 2018, 67, 6721–6726. [Google Scholar]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Song, Q.; Jin, S.; Zheng, F.C. Completion time and energy consumption minimization for UAV-enabled multicasting. IEEE Wirel. Commun. Lett. 2019, 8, 821–824. [Google Scholar] [CrossRef]
- Ning, Z.; Yang, Y.; Wang, X.; Guo, L.; Gao, X.; Guo, S.; Wang, G. Dynamic computation offloading and server deployment for UAV-enabled multi-access edge computing. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef] [Green Version]
- Zhan, C.; Zeng, Y. Completion time minimization for multi-UAV-enabled data collection. IEEE Trans. Wirel. Commun. 2019, 18, 4859–4872. [Google Scholar] [CrossRef]
- Tran, D.H.; Vu, T.X.; Chatzinotas, S.; ShahbazPanahi, S.; Ottersten, B. Coarse trajectory design for energy minimization in UAV-enabled. IEEE Trans. Veh. Technol. 2020, 69, 9483–9496. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Energy minimization for wireless communication with rotary-wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Xu, X.; Zhang, R. Trajectory design for completion time minimization in UAV-enabled multicasting. IEEE Trans. Wirel. Commun. 2018, 17, 2233–2246. [Google Scholar] [CrossRef]
- Ding, R.; Xu, Y.; Gao, F.; Shen, X. Trajectory Design and Access Control for Air–Ground Coordinated Communications System With Multiagent Deep Reinforcement Learning. IEEE Internet Things J. 2021, 9, 5785–5798. [Google Scholar] [CrossRef]
- Wang, C.; Deng, D.; Xu, L.; Wang, W. Resource Scheduling Based on Deep Reinforcement Learning in UAV Assisted Emergency Communication Networks. IEEE Trans. Commun. 2022, 70, 3834–3848. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Empirical power consumption model for uavs. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Di Franco, C.; Buttazzo, G. Energy-aware coverage path planning of UAVs. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 111–117. [Google Scholar]
- Morbidi, F.; Cano, R.; Lara, D. Minimum-energy path generation for a quadrotor UAV. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1492–1498. [Google Scholar]
- Morbidi, F.; Pisarski, D. Practical and Accurate Generation of Energy-Optimal Trajectories for a Planar Quadrotor. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 355–361. [Google Scholar]
- Yacef, F.; Rizoug, N.; Bouhali, O.; Hamerlain, M. Optimization of energy consumption for quadrotor UAV. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition (IMAV), Toulouse, France, 18–21 September 2017; pp. 18–21. [Google Scholar]
- Yacef, F.; Rizoug, N.; Degaa, L.; Bouhali, O.; Hamerlain, M. Trajectory optimisation for a quadrotor helicopter considering energy consumption. In Proceedings of the 2017 4th International Conference on Control, Decision and Information Technologies (CoDIT), Barcelona, Spain, 5–7 April 2017; pp. 1030–1035. [Google Scholar]
- Bramwell, A.R.S.; Balmford, D.; Done, G. Bramwell’s Helicopter Dynamics; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Filippone, A. Flight Performance of Fixed and Rotary Wing Aircraft; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Gao, N.; Zeng, Y.; Wang, J.; Wu, D.; Zhang, C.; Song, Q.; Qian, J.; Jin, S. Energy model for UAV communications: Experimental validation and model generalization. China Commun. 2021, 18, 253–264. [Google Scholar] [CrossRef]
- Yan, H.; Chen, Y.; Yang, S.H. New Energy Consumption Model for Rotary-Wing UAV Propulsion. IEEE Wirel. Commun. Lett. 2021, 10, 2009–2012. [Google Scholar] [CrossRef]
- Ding, R.; Gao, F.; Shen, X.S. 3D UAV trajectory design and frequency band allocation for energy-efficient and fair communication: A deep reinforcement learning approach. IEEE Trans. Wirel. Commun. 2020, 19, 7796–7809. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, W.; Shikh-Bahaei, M. Energy efficient UAV communication with energy harvesting. IEEE Trans. Veh. Technol. 2019, 69, 1913–1927. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, G.; Huang, H.; Waslander, S.; Tomlin, C. Quadrotor helicopter flight dynamics and control: Theory and experiment. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6461. [Google Scholar]
- Stuart, S. DC Motors, Speed Controls, Servo Systems: An Engineering Handbook; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Jia, G.; Ding, B.; Li, M. Mathematical Derivation and Simulational Verification for Aggressive Quadrotor Perching Control. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 5319–5324. [Google Scholar]
- Mellinger, D.; Michael, N.; Kumar, V. Trajectory generation and control for precise aggressive maneuvers with quadrotors. Int. J. Robot. Res. 2012, 31, 664–674. [Google Scholar] [CrossRef]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric tracking control of a quadrotor UAV on SE (3). In Proceedings of the 49th IEEE conference on decision and control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5420–5425. [Google Scholar]
- Bristeau, P.J.; Martin, P.; Salaün, E.; Petit, N. The role of propeller aerodynamics in the model of a quadrotor UAV. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 683–688. [Google Scholar]
- Powers, C.; Mellinger, D.; Kushleyev, A.; Kothmann, B.; Kumar, V. Influence of aerodynamics and proximity effects in quadrotor flight. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 289–302. [Google Scholar]
- Desset, C.; Debaillie, B.; Giannini, V.; Fehske, A.; Auer, G.; Holtkamp, H.; Wajda, W.; Sabella, D.; Richter, F.; Gonzalez, M.J.; et al. Flexible power modeling of LTE base stations. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 2858–2862. [Google Scholar]
- Ning, Z.; Sun, S.; Wang, X.; Guo, L.; Guo, S.; Hu, X.; Hu, B.; Kwok, R. Blockchain-enabled intelligent transportation systems: A distributed crowdsensing framework. IEEE Trans. Mob. Comput. 2021, 21, 4201–4217. [Google Scholar] [CrossRef]
- Shkel, A.M.; Lumelsky, V. Classification of the Dubins set. Robot. Auton. Syst. 2001, 34, 179–202. [Google Scholar] [CrossRef]
- Li, M.; Jia, G.; Gong, S.; Guo, R. Energy Consumption Model of BLDC Quadrotor UAVs for Mobile Communication Trajectory Planning. TechRxiv. Preprint 2022. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| mass | kg | gravity | N/kg |
| rotor radius | m | rotor location | m |
| lift slope | rotor disc area | m | |
| fuselage equivalent flat plate area | m | air density | kg/m |
| collective pitch angle | rad | profile drag coefficient | |
| incremental correction factor | rotor solid | ||
| viscous damping coefficient | Nms/rad | voltage constant | Vs/rad |
| motor resistance | moment of inertia x | kgm | |
| moment of inertia y | kgm | moment of inertia z | kgm |
| Parameter | Value |
|---|---|
| altitude of UAV | m |
| data amount | Mb |
| transmission power | w |
| white-noise power | dBm |
| channel bandwidth | MHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, G.; Li, C.; Li, M. Energy-Efficient Trajectory Planning for Smart Sensing in IoT Networks Using Quadrotor UAVs. Sensors 2022, 22, 8729. https://doi.org/10.3390/s22228729
Jia G, Li C, Li M. Energy-Efficient Trajectory Planning for Smart Sensing in IoT Networks Using Quadrotor UAVs. Sensors. 2022; 22(22):8729. https://doi.org/10.3390/s22228729
Chicago/Turabian StyleJia, Guoku, Chengming Li, and Mengtang Li. 2022. "Energy-Efficient Trajectory Planning for Smart Sensing in IoT Networks Using Quadrotor UAVs" Sensors 22, no. 22: 8729. https://doi.org/10.3390/s22228729
APA StyleJia, G., Li, C., & Li, M. (2022). Energy-Efficient Trajectory Planning for Smart Sensing in IoT Networks Using Quadrotor UAVs. Sensors, 22(22), 8729. https://doi.org/10.3390/s22228729