
GLSNN Network: A Multi-Scale Spatiotemporal Prediction Model for Urban Traffic Flow


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
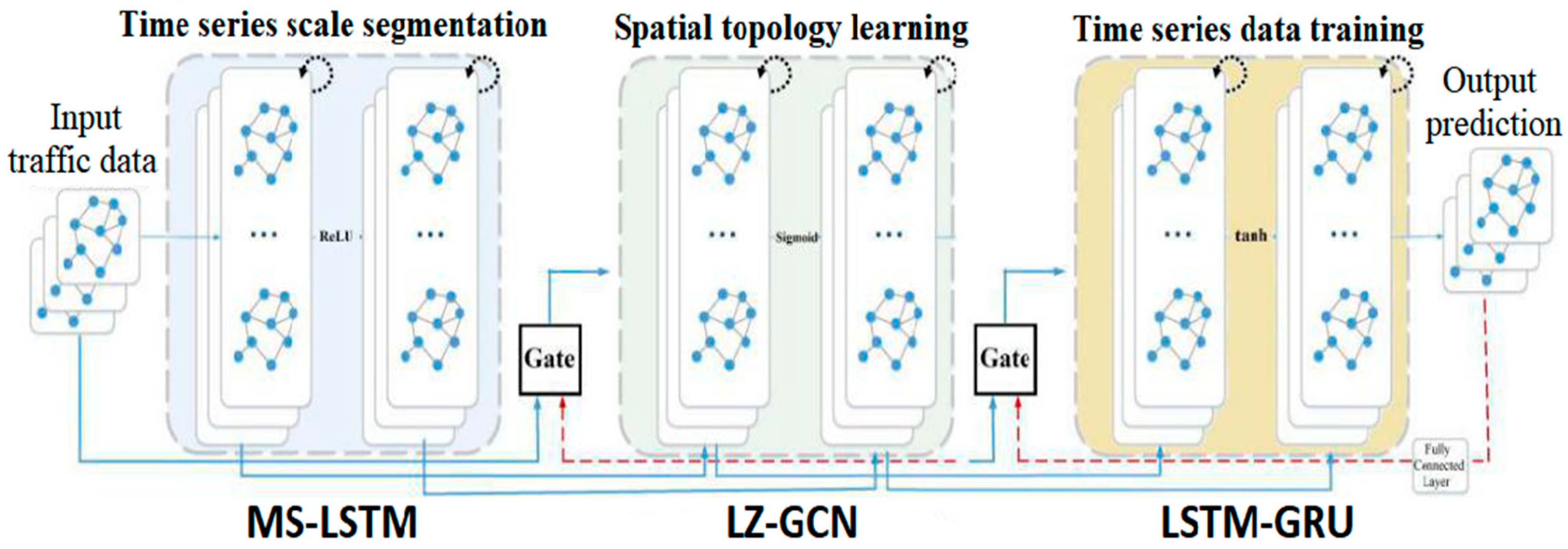
3. Methodology
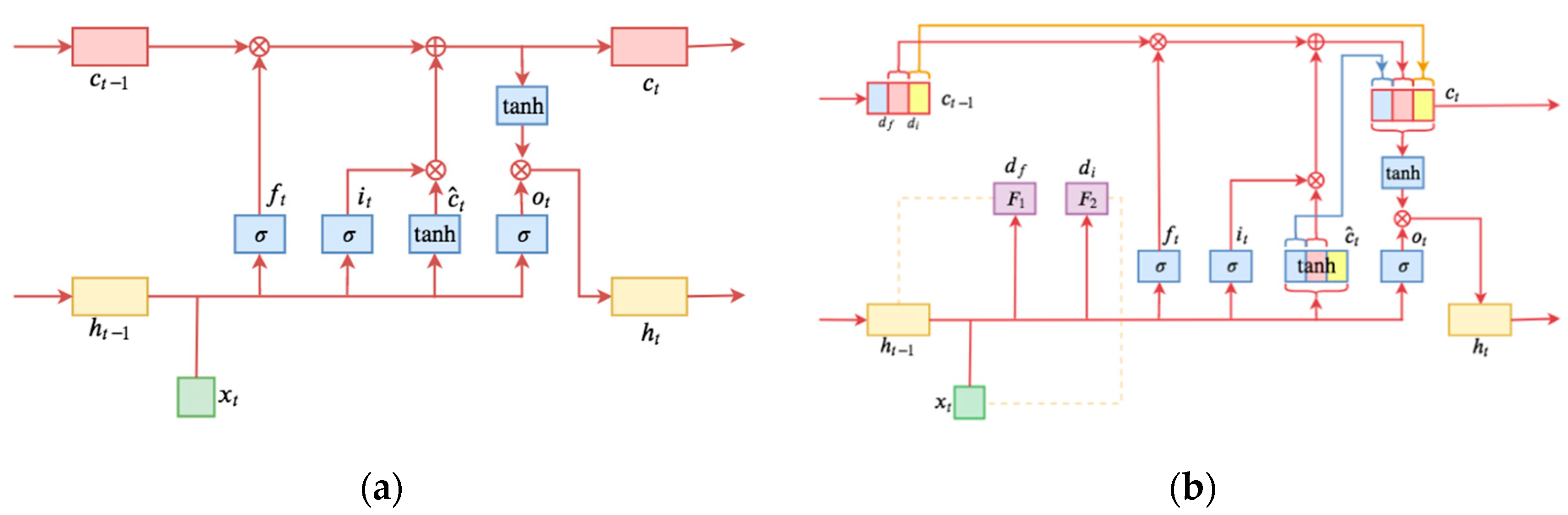
3.1. Scale Segmentation of Huge Traffic Flow Data Based on MS-LSTM
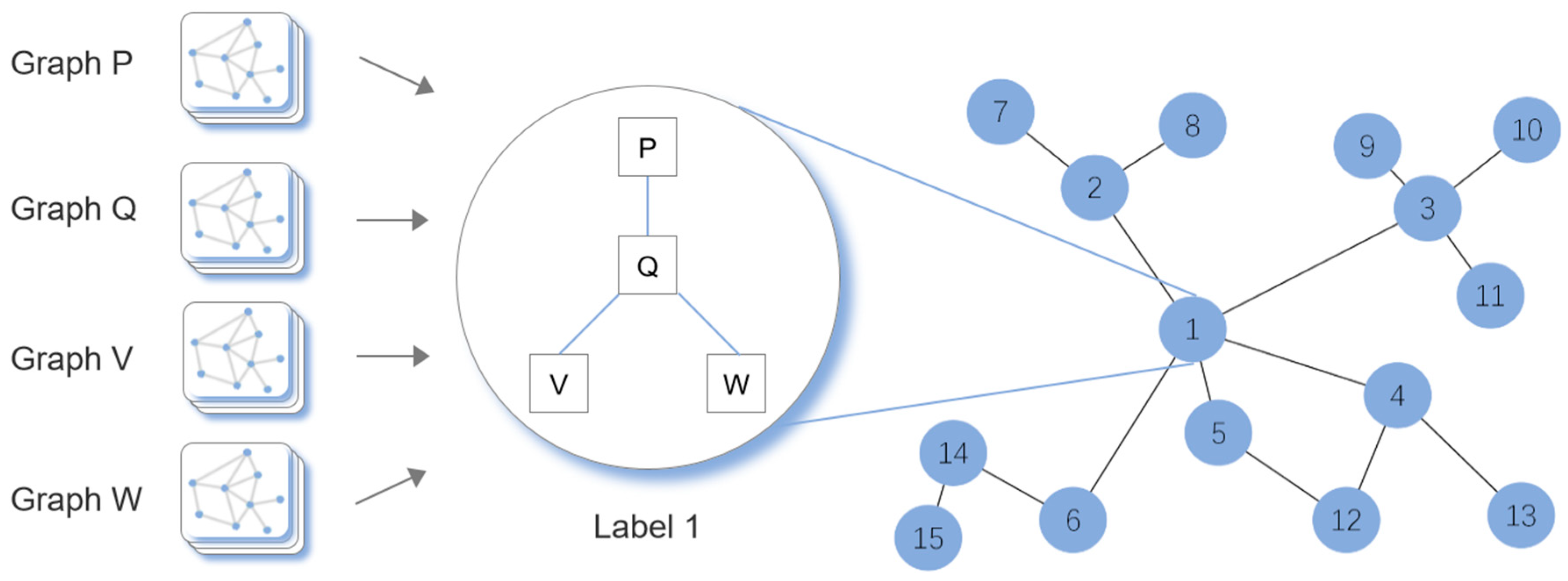
3.2. Acquisition and Learning of Multi-Scale Spatial Dependencies of Urban Complex Road Networks Based on the LZ-GCN Network
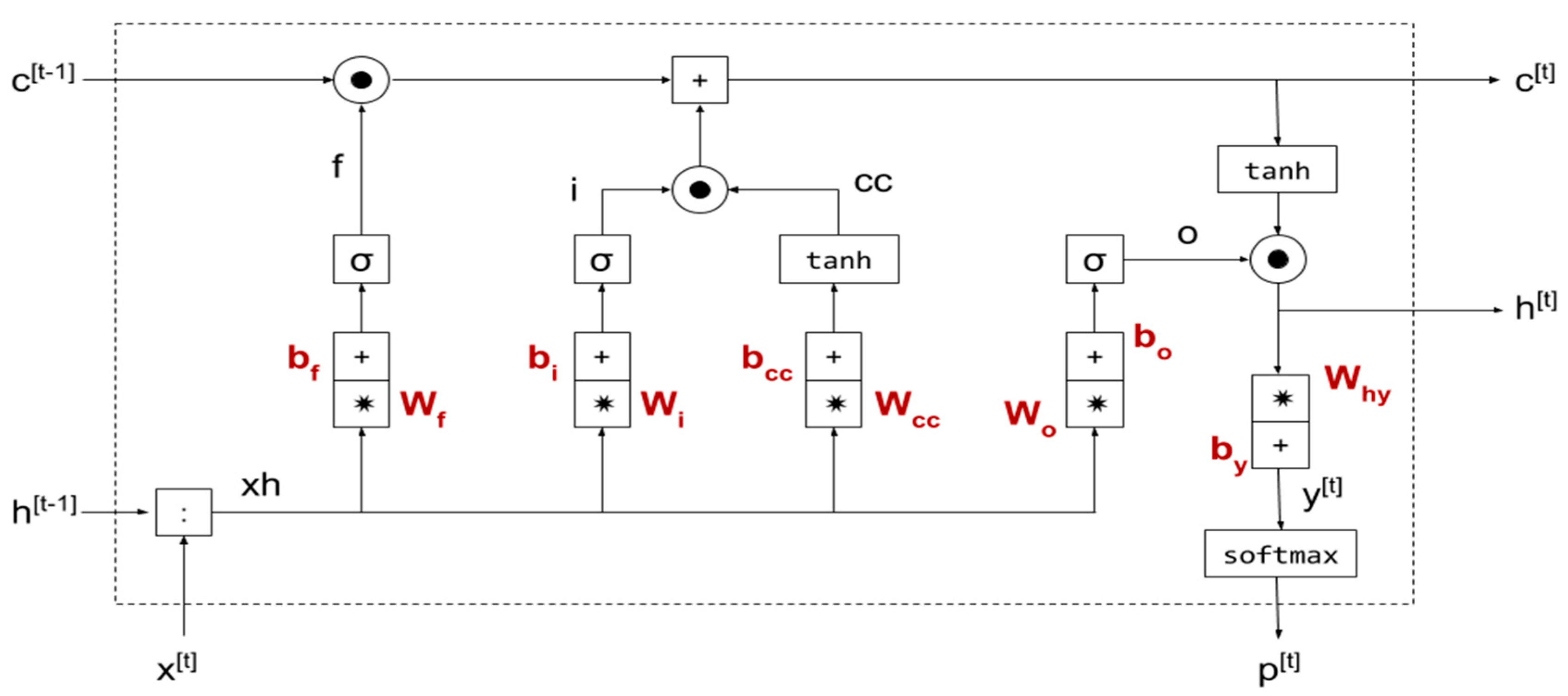
3.3. Learning Multi-Scale Time Dependency Based on LSTM-GRU Network
4. Experiments
4.1. Data Description
- (1)
- Taxi travel data
- (2)
- Detector speed data
4.2. Evaluation Metrics
4.3. Experiment Settings
4.4. Experiment and Results
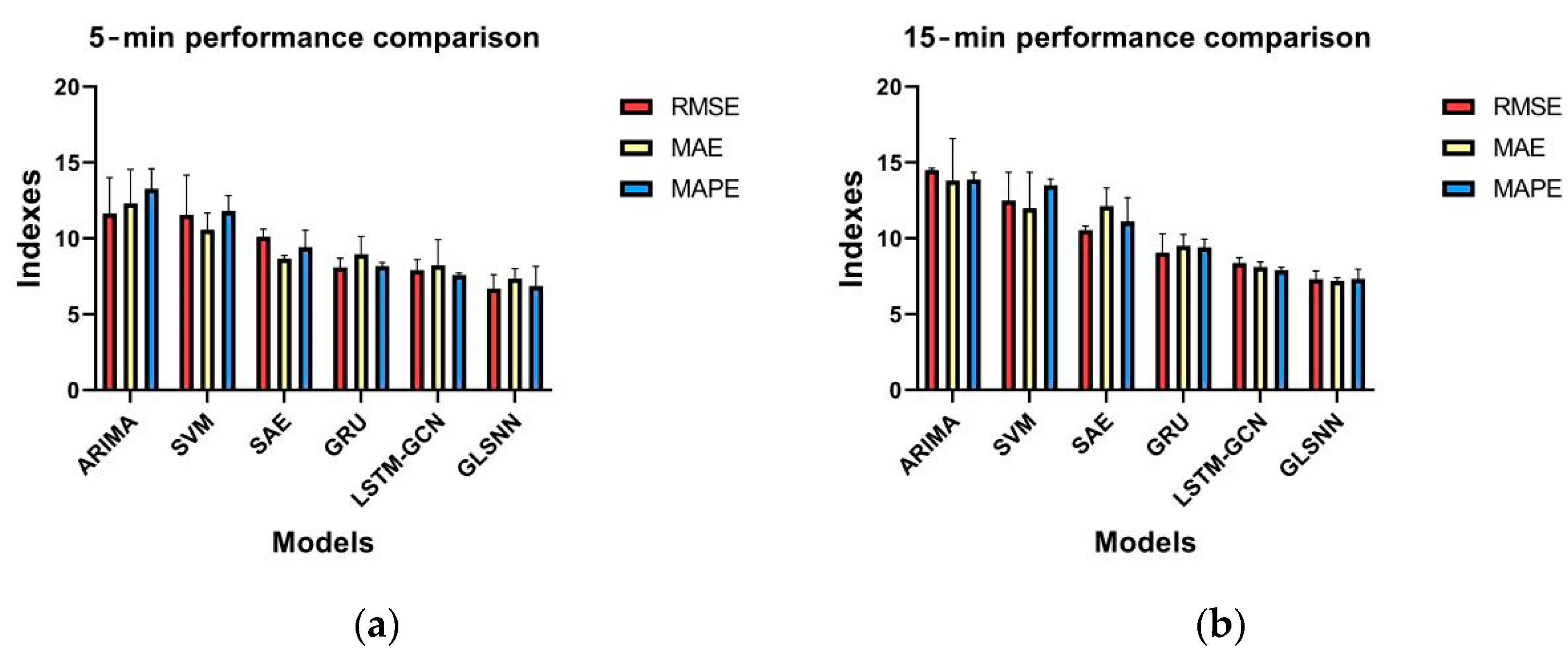
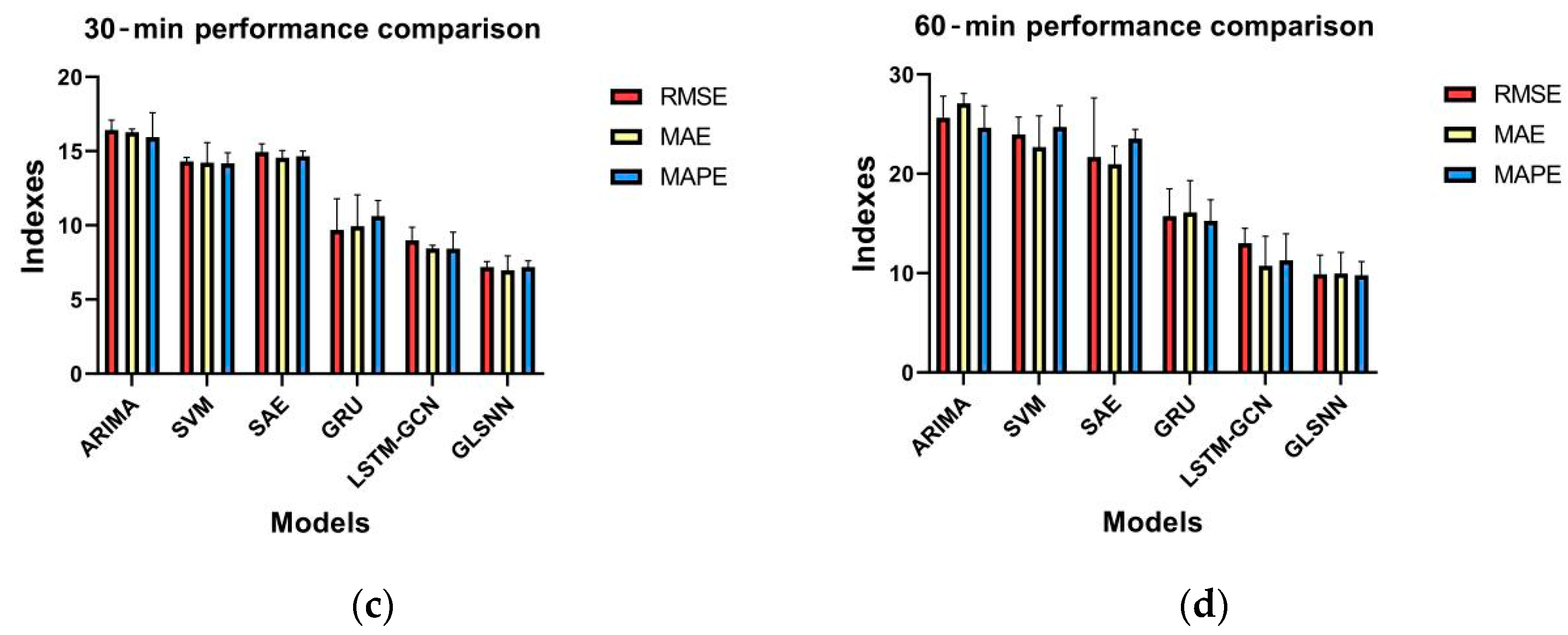
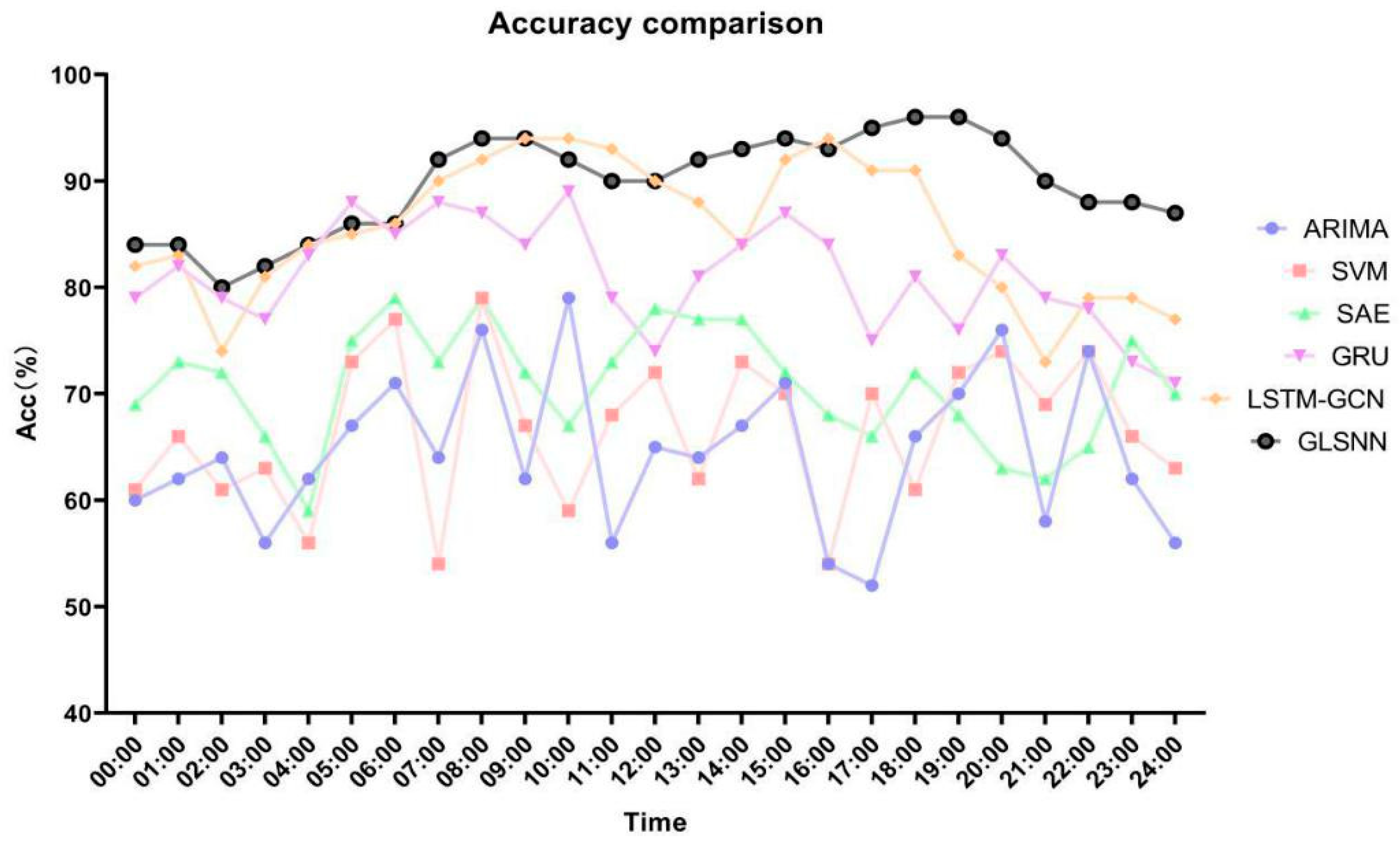
4.4.1. Prediction of Complex Traffic Flow in Different Time Periods
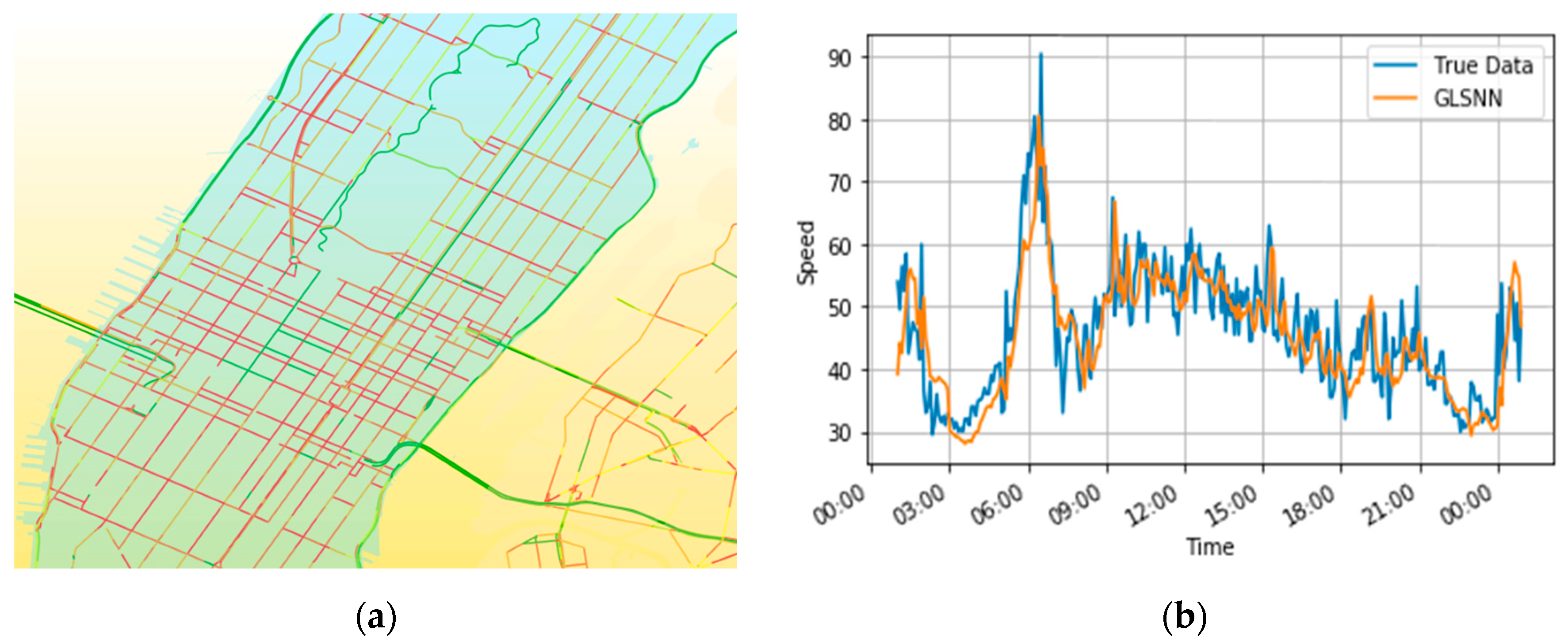
4.4.2. Traffic Flow Prediction in Different Urban Areas
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lippi, M.; Bertini, M.; Frasconi, P. Short-term traffic flow forecasting: An experimental comparison of time-series analysis and supervised learning. IEEE Trans. Intell. Transp. Syst. 2013, 14, 871–882. [Google Scholar] [CrossRef]
- Zhang, W.; Wei, D. Prediction for network traffic of radial basis function neural network model based on improved particle swarm optimization algorithm. Neural Comput. Appl. 2018, 29, 1143–1152. [Google Scholar] [CrossRef]
- Wu, Y.; Tan, H.; Qin, L.; Ran, B.; Jiang, Z. A hybrid deep learning based traffic flow prediction method and its understanding. Transp. Res. Part C Emerg. Technol. 2018, 90, 166–180. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, M.; Lin, X.; Wang, Y.; He, F. Multistep speed prediction on traffic networks: A deep learning approach considering spatio-temporal dependencies. Transp. Res. Part C Emerg. Technol. 2019, 105, 297–322. [Google Scholar] [CrossRef]
- Koesdwiady, A.; Soua, R.; Karray, F. Improving traffic flow prediction with weather information in connected cars: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 65, 9508–9517. [Google Scholar] [CrossRef]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.Y. Traffic flow prediction with big data: A deep learning approach. IEEE Trans. Intell. Transp. Syst. 2014, 16, 865–873. [Google Scholar] [CrossRef]
- Laptev, N.; Yosinski, J.; Li, L.E.; Smyl, S. Time-series extreme event forecasting with neural networks at uber. In Proceedings of the 34th International Conference on Machine Learning, ICML 2017, Sydney, NSW, Australia, 6–11 August 2017. [Google Scholar]
- Zhang, J.; Zheng, Y.; Qi, D.; Li, R.; Yi, X. DNN-based prediction model for spatio-temporal data. In Proceedings of the 24th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Burlingame, CA, USA, 31 October–3 November 2016. [Google Scholar]
- Wang, S.; Zhao, J.; Shao, C.; Dong, C.; Yin, C. Truck traffic flow prediction based on LSTM and GRU methods with sampled GPS data. IEEE Access 2020, 8, 208158–208169. [Google Scholar] [CrossRef]
- Abduljabbar, R.L.; Dia, H.; Tsai, P.W. Unidirectional and bidirectional LSTM models for short-term traffic prediction. J. Adv. Transp. 2021, 2021, 5589075. [Google Scholar] [CrossRef]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning traffic as images: A deep convolutional neural network for large-scale transportation network speed prediction. Sensors 2017, 17, 818. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zheng, Y.; Qi, D. Deep spatio-temporal residual networks for citywide crowd flows prediction. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting. arXiv 2017, arXiv:1707.01926. [Google Scholar]
- Yuan, J.; Zheng, Y.; Xie, X.; Sun, G. Driving with knowledge from the physical world. In Proceedings of the 17th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Diego, CA, USA, 21–24 August 2011. [Google Scholar]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. arXiv 2017, arXiv:1709.04875. [Google Scholar]
- Phan, T.V.; Islam, S.T.; Nguyen, T.G.; Bauschert, T. Q-DATA: Enhanced traffic flow monitoring in software-defined networks applying Q-learning. In Proceedings of the 2019 15th International Conference on Network and Service Management (CNSM), Halifax, NS, Canada, 21–25 October 2019. [Google Scholar]
- Lana, I.; Del Ser, J.; Velez, M.; Vlahogianni, E.I. Road traffic forecasting: Recent advances and new challenges. IEEE Intell. Transp. Syst. Mag. 2018, 10, 93–109. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, S.; Li, L. Multi-model ensemble for short-term traffic flow prediction under normal and abnormal conditions. IET Intell. Transp. Syst. 2019, 13, 260–268. [Google Scholar] [CrossRef]
- Wang, X.; Nie, L.; Ning, Z.; Guo, L.; Wang, G.; Gao, X.; Kumar, N. Deep Learning-based Network Traffic Prediction for Secure Backbone Networks in Internet of Vehicles. ACM Trans. Internet Technol. 2021, 22, 1–20. [Google Scholar] [CrossRef]
- Yao, H.; Wu, F.; Ke, J.; Tang, X.; Jia, Y.; Lu, S.; Gong, P.; Ye, J.; Li, Z. Deep multi-view spatial-temporal network for taxi demand prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Kumar, S.V.; Vanajakshi, L. Short-term traffic flow prediction using seasonal ARIMA model with limited input data. Eur. Transp. Res. Rev. 2016, 7, 170–178. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Song, G.; Hong, H.; Xie, K. Deep architecture for traffic flow prediction: Deep belief networks with multitask learning. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2191–2201. [Google Scholar] [CrossRef]
- Cui, Z.; Henrickson, K.; Ke, R.; Wang, Y. Traffic graph convolutional recurrent neural network: A deep learning framework for network-scale traffic learning and forecasting. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4883–4894. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.W.; Wang, Y.D.; Jia, L.M.; Qin, Y.; Dong, H.H. Real-time road traffic state prediction based on ARIMA and Kalman filter. Front. Inf. Technol. Electron. Eng. 2017, 18, 287–302. [Google Scholar] [CrossRef]
- Feng, X.; Ling, X.; Zheng, H.; Chen, Z.; Xu, Y. Adaptive multi-kernel SVM with spatial-temporal Correlation for short-term traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2001–2013. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Lu, X.; Zhao, W. Research on optimized GA-SVM vehicle speed prediction model based on driver-vehicle-road-traffic system. Sci. China (Technol. Sci.) 2018, 61, 782–790. [Google Scholar] [CrossRef]
- Yang, X.; Zou, Y.; Chen, L. Operation analysis of freeway mixed traffic flow based on catch-up coordination platoon. Accid. Anal. Prev. 2022, 175, 106780. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Kong, D.; Sun, L.; Zhang, T.; Song, Y. Fundamental diagram and stability analysis for heterogeneous traffic flow considering human-driven vehicle driver’s acceptance of cooperative adaptive cruise control vehicles. Phys. A Stat. Mech. Its Appl. 2022, 589, 126647. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, B.; Wang, Y.; Huang, C.; Liu, J.; Teng, W. GLSNN Network: A Multi-Scale Spatiotemporal Prediction Model for Urban Traffic Flow. Sensors 2022, 22, 8880. https://doi.org/10.3390/s22228880
Cai B, Wang Y, Huang C, Liu J, Teng W. GLSNN Network: A Multi-Scale Spatiotemporal Prediction Model for Urban Traffic Flow. Sensors. 2022; 22(22):8880. https://doi.org/10.3390/s22228880
Chicago/Turabian StyleCai, Benhe, Yanhui Wang, Chong Huang, Jiahao Liu, and Wenxin Teng. 2022. "GLSNN Network: A Multi-Scale Spatiotemporal Prediction Model for Urban Traffic Flow" Sensors 22, no. 22: 8880. https://doi.org/10.3390/s22228880
APA StyleCai, B., Wang, Y., Huang, C., Liu, J., & Teng, W. (2022). GLSNN Network: A Multi-Scale Spatiotemporal Prediction Model for Urban Traffic Flow. Sensors, 22(22), 8880. https://doi.org/10.3390/s22228880