
The Two-Stage Suspension System of the Fiber Optic Vector Hydrophone for Isolating the Vibration from the Mooring Rope

Abstract
:1. Introduction
2. Theory
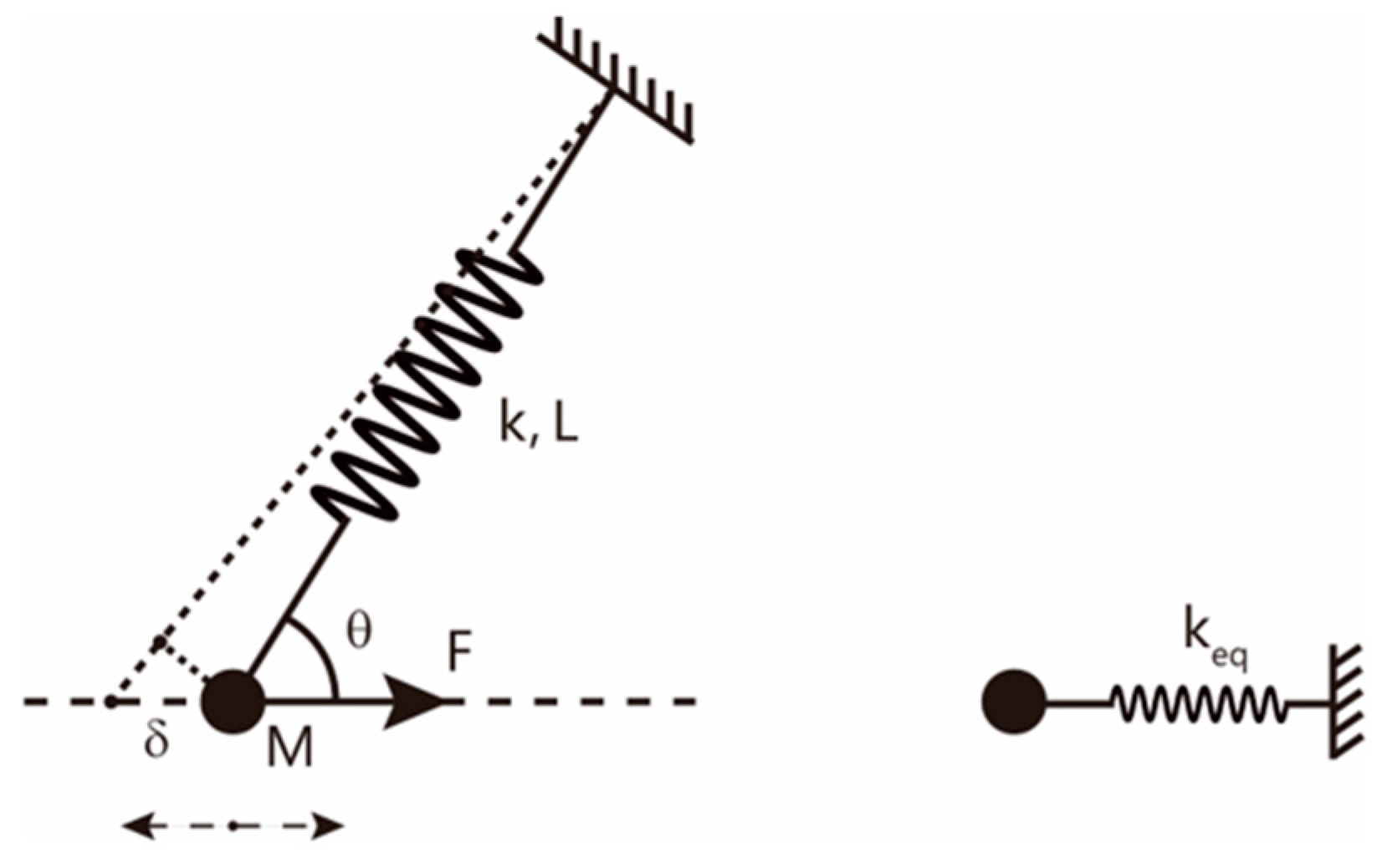
2.1. The Equivalence of the Suspension System Composed of Several Springs with Difference Suspending Angles
2.2. The Theoretical Model of the OSSS
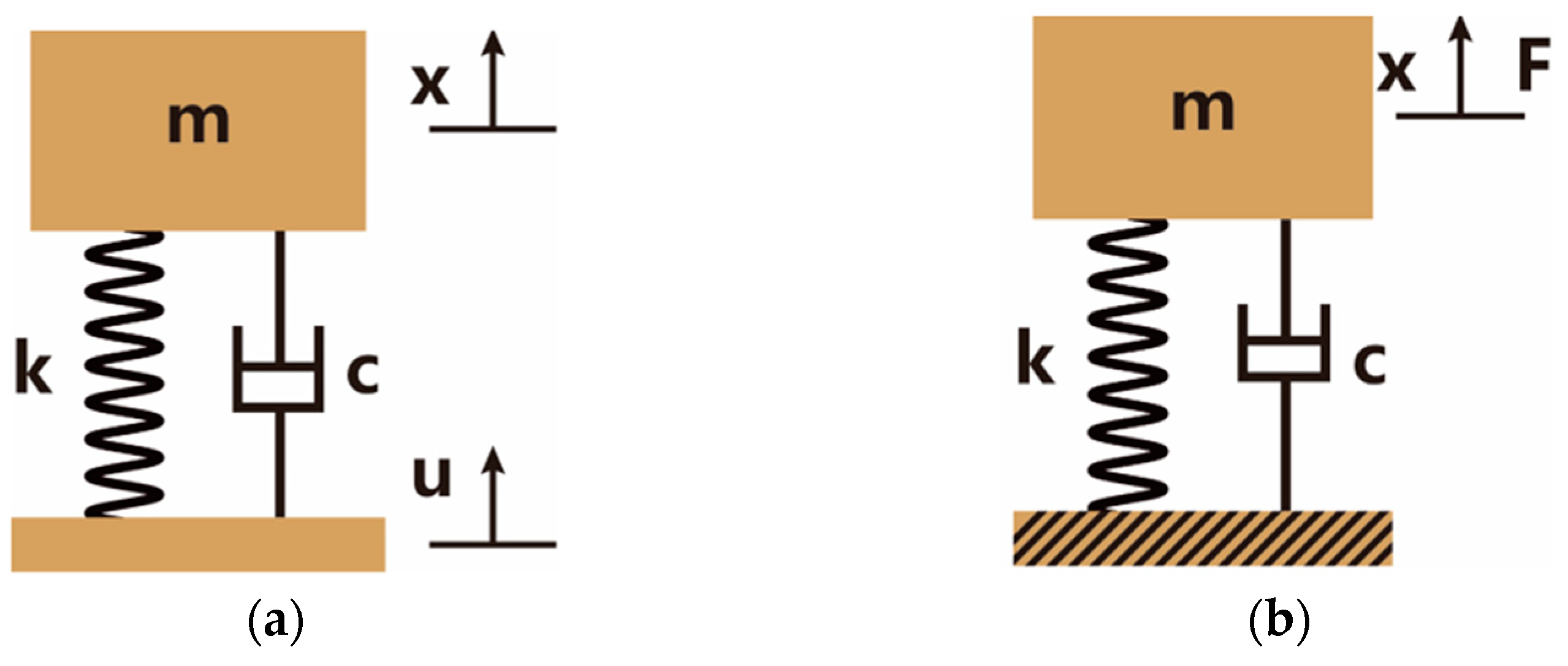
2.2.1. The Acceleration Transmissibility Model of the OSSS
2.2.2. The Acceleration Response Model of FOVH in the OSSS
2.3. The Theoretical Model of the TSSS
2.3.1. The Acceleration Transmissibility Model of the TSSS
2.3.2. The Acceleration Response Model of FOVH in the TSSS
3. Simulation and Analysis
3.1. Simulation According to the Theory
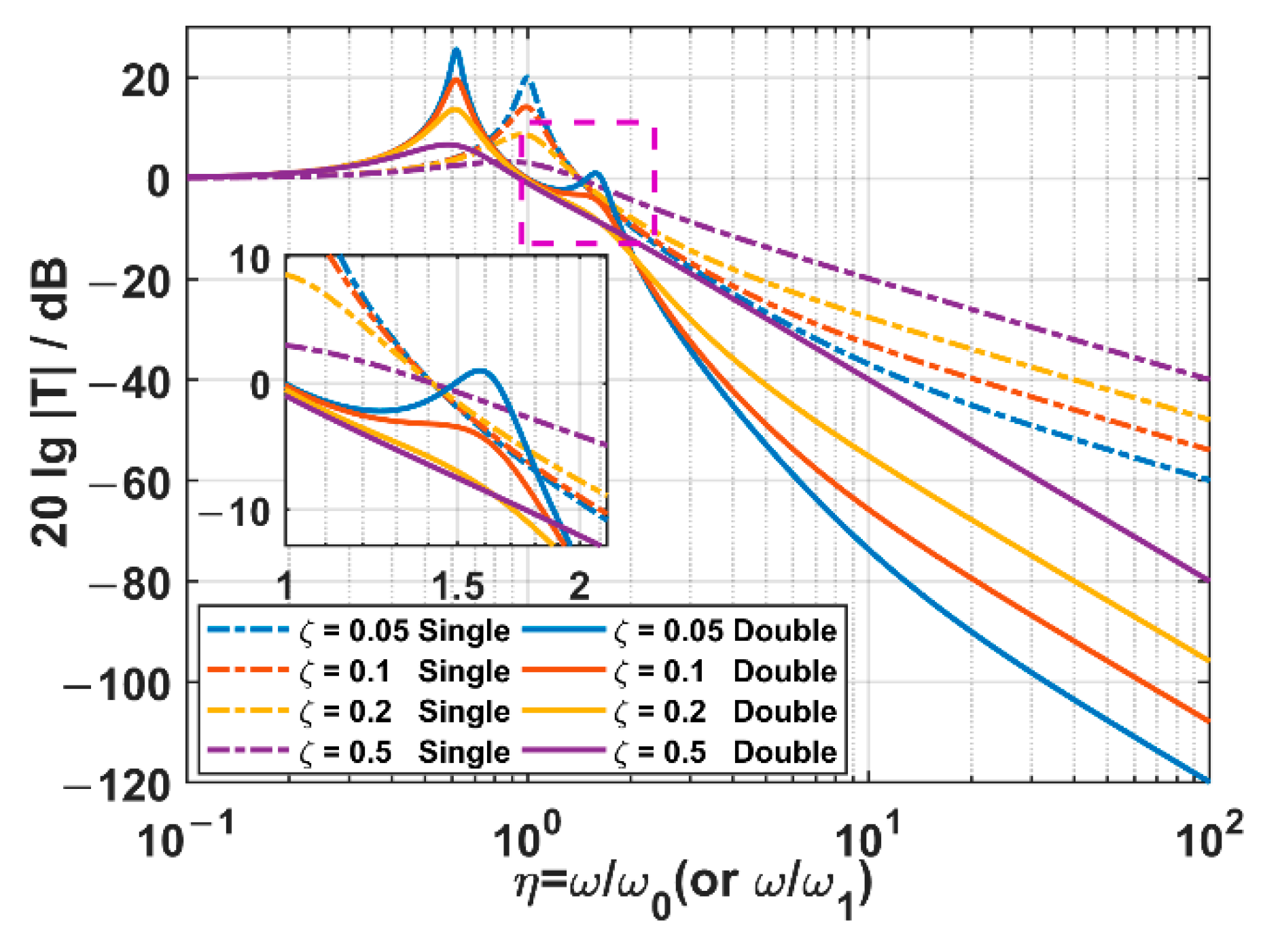
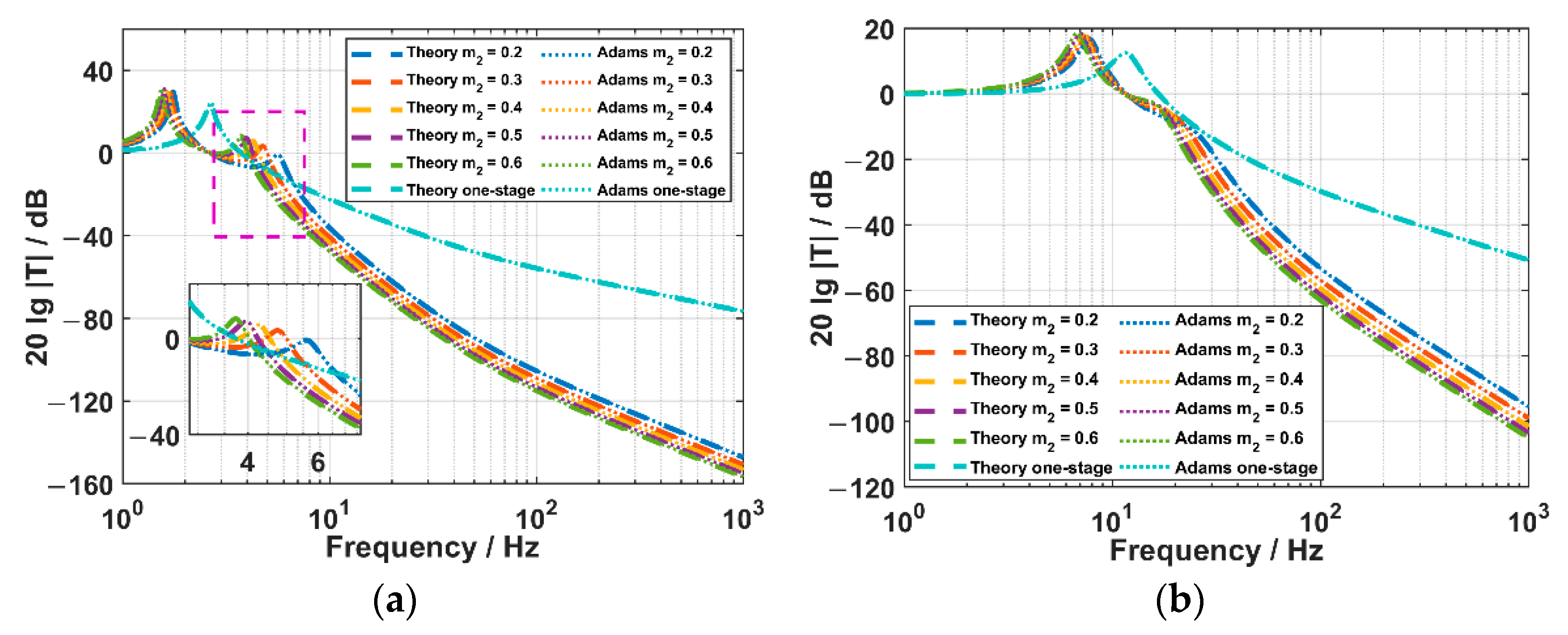
3.1.1. Comparison of the Acceleration Transmissibilities of the Two Suspension Systems
- (a)
- The mass ratio is fixed, and the damping ratio is changed.
- When the frequency ratio , the system works in the resonant region, and it is not able to suppress the acceleration transmitted from the outer frame;
- When the frequency ratio , the system turns into a suppressing region, and it always has the ability to suppress the acceleration transmission in any damping ratio situations;
- In the suppressing region, the acceleration transmissibility decreases as the frequency ratio increases. The smaller the damping ratio, the steeper the drop.
- In the case of low damping (), there are two remarkable resonant peaks, which are located on the two sides of the undamped natural frequency of the inner suspension. The higher-frequency resonant peak is about 1.6 times , and the lower-frequency one is about 0.6 times .
- With the increase in the damping ratio, the acceleration transmissibilities of the two resonant peaks decrease, and the higher-frequency resonant peak decreases faster than the lower-frequency one;
- The range of the suppressing region is determined by the acceleration transmissibility of the higher-frequency resonant peak, which is further decided by the damping ratio. When the damping ratio is 0, the suppressing region starts after the higher-frequency resonant peak (about ). However, when the increased damping ratio makes the acceleration transmissibility at the higher-frequency resonant peak lower than 0 dB, a broadened suppressing region starting from about the undamped natural frequency (about ) can be achieved.
- After the higher-frequency resonant peak, the acceleration transmissibility in the suppressing region decreases with the increase in the frequency. The smaller the damping ratio is, the steeper the drop and the more the ability to suppress the acceleration transmissibility can be achieved.
- (b)
- The damping ratio is fixed, and the mass ratio is changed.
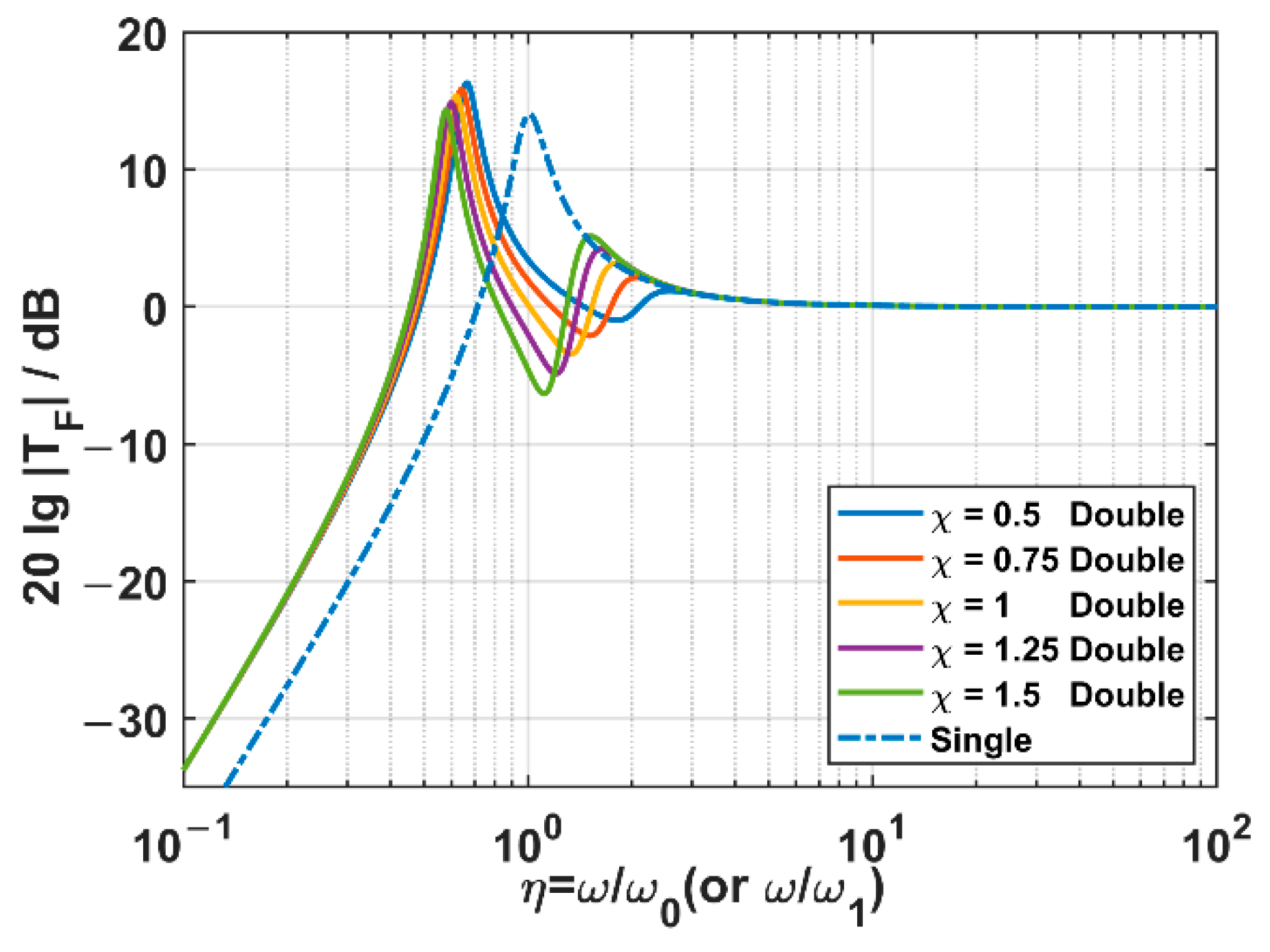
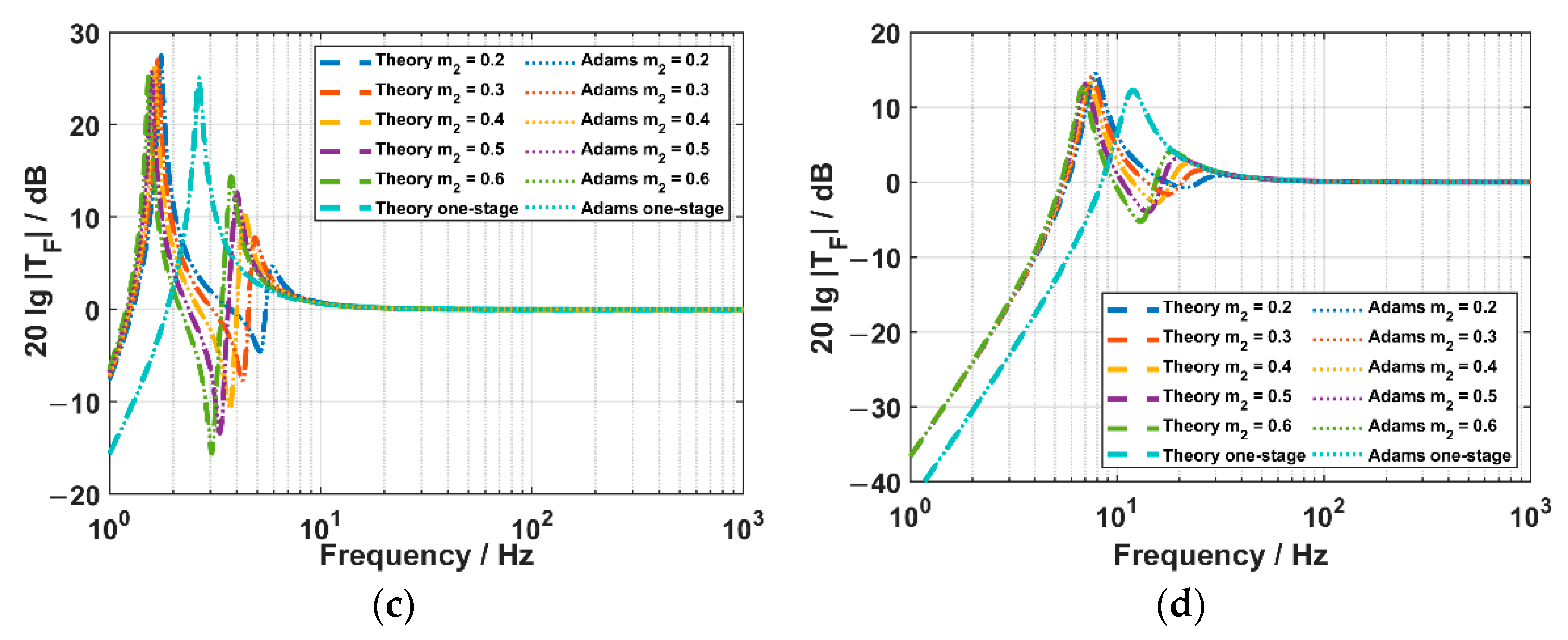
3.1.2. Comparison of the Acceleration Response of the FOVH Suspended in Two Kinds of Suspensions
- (a)
- The mass ratio is fixed, and the damping ratio is changed.
- (b)
- The damping ratio is fixed, and the mass ratio is changed.
3.2. Verification of the Theory with Adams
4. Experiment and Discussion
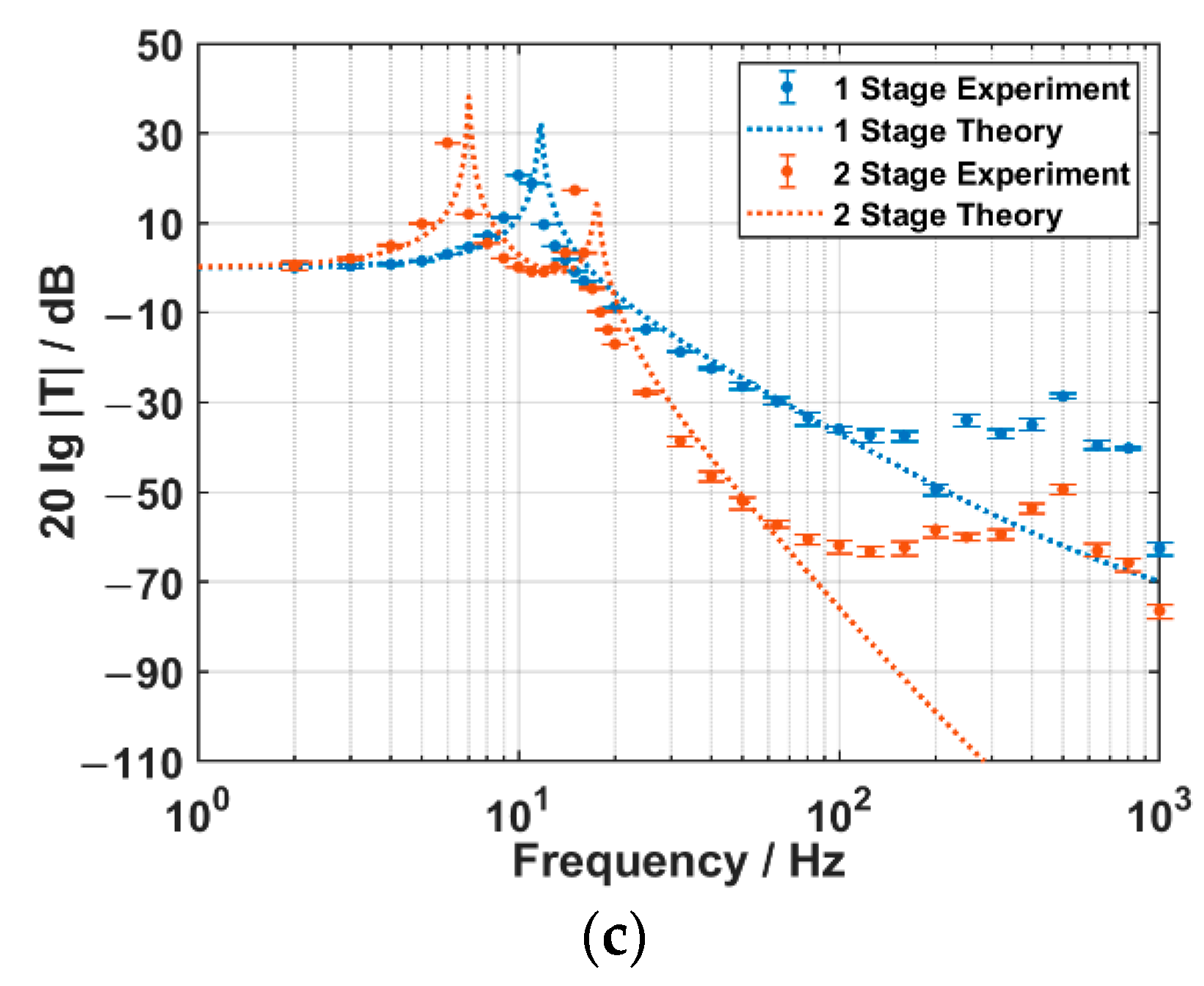
4.1. The Characeteristics of the Acceleration Transmission of Two Suspension Systems
4.2. The Acceleration Responses of the FOVHs in Two Suspension Systems
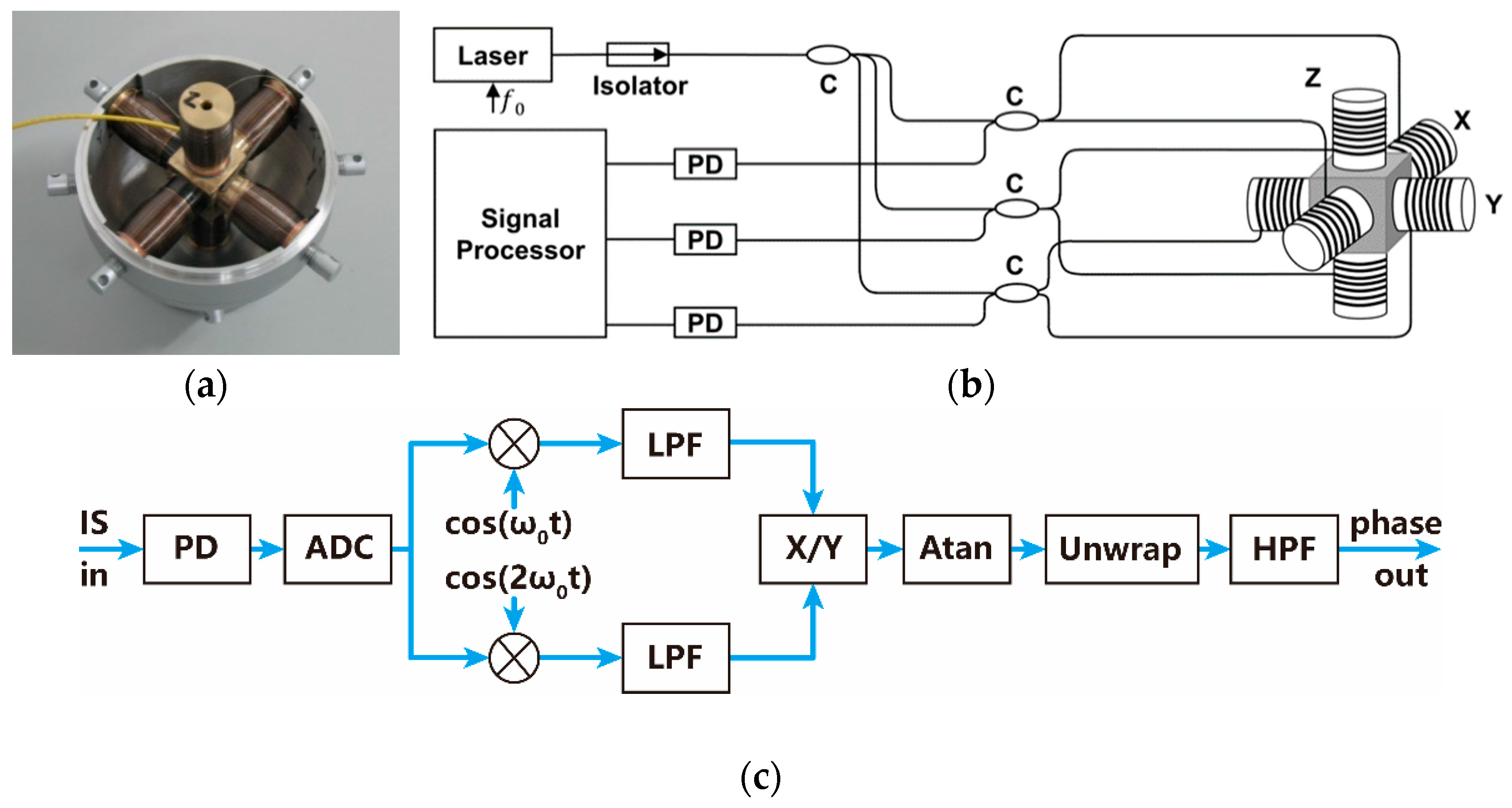
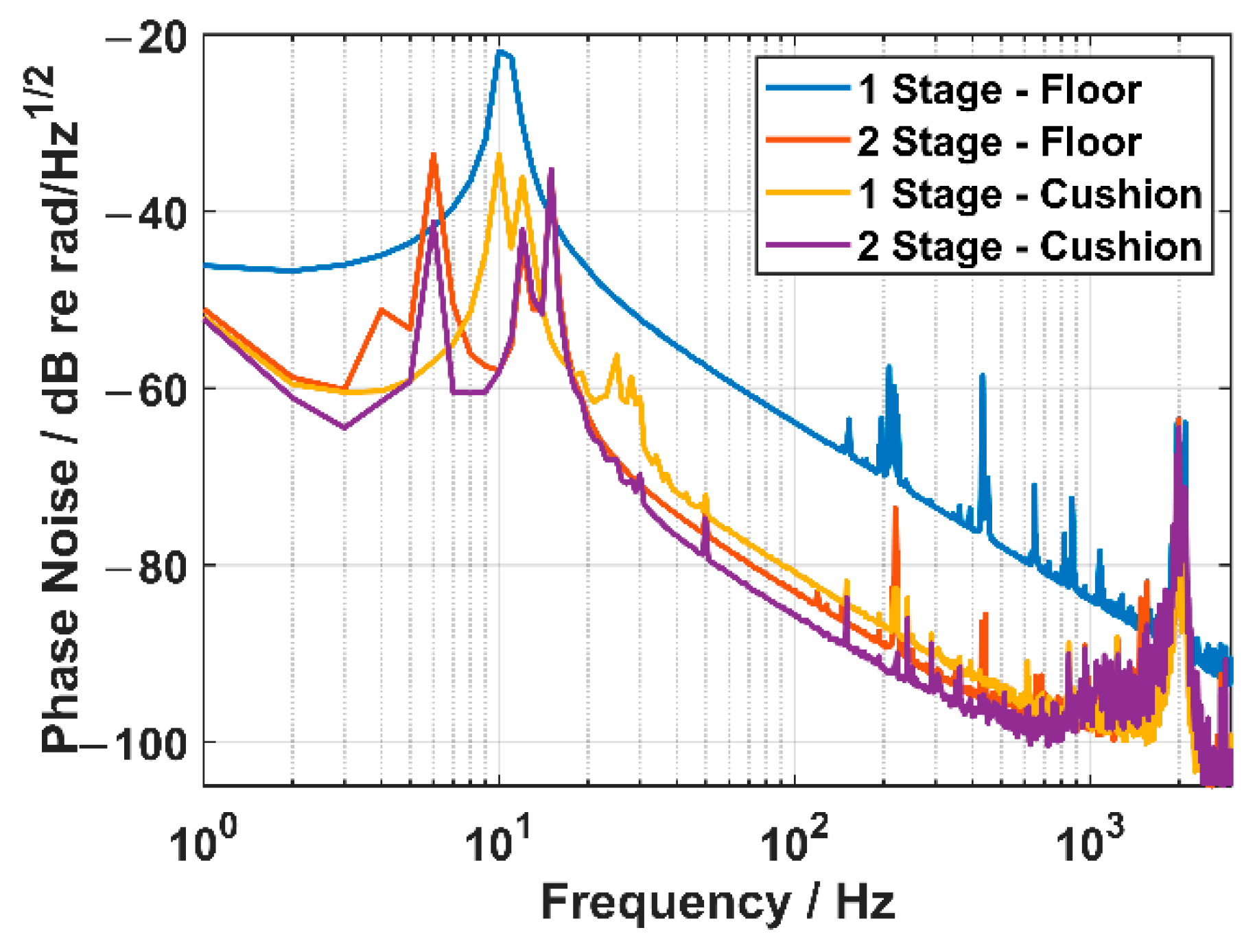
4.3. The Phase Noise of the FOVH in Two Suspension Systems
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Unit |
|---|---|---|
| Acceleration transmissibility | 1 | |
| Acceleration achieved by the FOVH | m/s2 | |
| Acceleration on the outer frame | m/s2 | |
| Acceleration response of the FOVH | 1 | |
| Mass of the FOVH | kg | |
| Amplitude of the ambient exciting force | N | |
| Acceleration picked by the FOVH | m/s2 | |
| Stiffness coefficient of the spring | N/m | |
| Equivalent stiffness coefficient | N/m | |
| Small displacement along the force | m | |
| Damping coefficient | N·s/m | |
| Suspending angle | ° | |
| Polar angle of the ambient force | ° | |
| φ | Azimuth angle of the ambient force | ° |
| Displacement of the FOVH in the OSSS | m | |
| Complex amplitude of x | m | |
| ω | Circular frequency of the ambient excitation | Hz |
| Displacement of the outer frame | m | |
| Complex amplitude of u | m | |
| Damping ratio in the OSSS | 1 | |
| Frequency ratio in the OSSS | 1 | |
| Undamped natural frequency in the OSSS | Hz | |
| Equivalent stiffness coefficient of the inner suspension | N/m | |
| Equivalent damping coefficient of the inner suspension | N·s/m | |
| Equivalent stiffness coefficient of the outer suspension | N/m | |
| Equivalent damping coefficient of the outer suspension | N·s/m | |
| Displacement of the FOVH in the TSSS | x | |
| Mass of the middle frame | kg | |
| Displacement of the middle frame | m | |
| Damping ratio of the inner suspension | 1 | |
| Frequency ratio of the inner suspension | 1 | |
| Undamped natural frequency of the inner suspension | Hz | |
| Mass ratio of the middle frame to the FOVH | 1 | |
| Dc amplitude of the digitalized interference signal | V | |
| Photoelectric conversion efficiency | V/W | |
| Light power | W | |
| Fringe visibility | 1 | |
| Initial phase | rad | |
| Phase signal | rad | |
| Depth of the phase carrier | rad | |
| Frequency of the phase carrier | Hz | |
| Quadrature signal in the PGC method | V | |
| In-phase signal in the PGC method | V | |
| Acceleration sensitivity of the FOVH | dB re rad/g | |
| Sound pressure sensitivity of the standard piezoelectric-type hydrophone | dB re V/μPa | |
| Δϕ | Amplitude of the phase signal received by the FOVH | rad |
| Amplitude of the voltage signal from the piezoelectric-type hydrophone | V | |
| Wave number | 1/m | |
| Unified depth | m | |
| Circular frequency of the sound | Hz | |
| Density of the water | kg/m3 | |
| Sound velocity in water | m/s |
References
- Leven, C.; Barrash, W. Fiber optic pressure measurements open up new experimental possibilities in hydrogeology. Groundwater 2022, 60, 125–136. [Google Scholar] [CrossRef] [PubMed]
- Shao, Z.; Wu, Y.; Wang, S.; Wang, Y.; Sun, Z.; Wang, W.; Liu, Z.; Liu, B. All-sapphire fiber-optic pressure sensors for extreme harsh environments. Opt. Express 2022, 30, 3665–3674. [Google Scholar] [CrossRef] [PubMed]
- Yugay, V.; Mekhtiyev, A.; Madi, P.; Neshina, Y.; Alkina, A.; Gazizov, F.; Afanaseva, O.; Ilyashenko, S. Fiber-Optic System for Monitoring Pressure Changes on Mine Support Elements. Sensors 2022, 22, 1735. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Wu, Y.; Song, H.; Zou, Y.; Shu, X. Multiparameter measuring system using fiber optic sensors for hydraulic temperature, pressure and flow monitoring. Measurement 2022, 190, 110705. [Google Scholar] [CrossRef]
- Liang, T.; Li, W.; Lei, C.; Li, Y.; Li, Z.; Xiong, J. All-SiC fiber-optic sensor based on direct wafer bonding for high temperature pressure sensing. Photonic Sens. 2022, 12, 130–139. [Google Scholar] [CrossRef]
- Szczerska, M. Temperature Sensors Based on Polymer Fiber Optic Interferometer. Chemosensors 2022, 10, 228. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, Y.; Cai, L. Hybrid Fiber-Optic Sensor for Seawater Temperature and Salinity Simultaneous Measurements. J. Lightwave Technol. 2022, 40, 880–886. [Google Scholar] [CrossRef]
- Fouzar, S.; Eftimov, T.A.; Kostova, I.; Dimitrova, T.L.; Benmounah, A.; Lakhssassi, A. A Simple Fiber Optic Temperature Sensor for Fire Detection in Hazardous Environment Based on Differential Time Rise/Decay Phosphorescence Response. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Tong, X.; Shen, Y.; Mao, X.; Yu, C.; Guo, Y. Fiber-optic temperature sensor based on beat frequency and neural network algorithm. Opt. Fiber Technol. 2022, 68, 102783. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, J.; Wang, X.; Peng, Y.; Hu, X. Femtosecond laser-inscribed fiber-optic sensor for seawater salinity and temperature measurements. Sens. Actuators B 2022, 353, 131134. [Google Scholar] [CrossRef]
- Zhang, S.; Peng, Y.; Wei, X.; Zhao, Y. High-sensitivity biconical optical fiber SPR salinity sensor with a compact size by fiber grinding technique. Measurement 2022, 204, 112156. [Google Scholar] [CrossRef]
- Li, H.; Gao, H.; Fan, W.; Zhou, R.; Qiao, X. Development of low frequency and high sensitivity fiber optic accelerometer based on multi-stage flexure hinges. Opt. Fiber Technol. 2022, 73, 103018. [Google Scholar] [CrossRef]
- Qu, Z.; Ouyang, H.; Liu, H.; Hu, C.; Tu, L.; Zhou, Z. 2.4 ng/√ Hz low-noise fiber-optic MEMS seismic accelerometer. Opt. Lett. 2022, 47, 718–721. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Wang, S.; Jiang, J.; Li, Z.; Yang, H.; Liu, T. A Fiber-Optic Accelerometer Based on Extrinsic Fabry-Perot Interference for Low Frequency Micro-Vibration Measurement. IEEE Photonics J. 2022, 14, 1–6. [Google Scholar] [CrossRef]
- Qu, Z.; Lu, P.; Zhang, W.; Xiong, W.; Liu, D.; Zhang, J. Miniature tri-axis accelerometer based on fiber optic Fabry-Pérot interferometer. Opt. Express 2022, 30, 23227–23237. [Google Scholar] [CrossRef]
- Cervera, G.A.; Paiva, S.A.S.; Galvez, P.S.; Merino, J.S.; Butcher, M.; Matheson, E.; Castro, M. An Inertial Uni-axial Interferometer-Based Accelerometer for harsh environments. IEEE Sens. J. 2022, 22, 21540–21549. [Google Scholar] [CrossRef]
- Tveten, A.B.; Dandridge, A.; Davis, C.M.; Giallorenzi, T.G. Fibre optic accelerometer. Electron. Lett. 1980, 16, 854–856. [Google Scholar] [CrossRef]
- Meng, Z.; Chen, W.; Wang, J.; Hu, X.; Chen, M.; Zhang, Y. Recent progress in fiber-optic hydrophones. Photonic Sens. 2021, 11, 109–122. [Google Scholar] [CrossRef]
- Parida, O.P.; Nayak, J.; Asokan, S. Design and validation of a novel high sensitivity self-temperature compensated fiber Bragg grating accelerometer. IEEE Sens. J. 2019, 19, 6197–6204. [Google Scholar] [CrossRef]
- Jiang, L.; Yu, D.; Gao, H.; Xu, D.; Wang, B.; Qiao, X. A Fiber Bragg Grating accelerometer with cantilever beam. Opt. Fiber Technol. 2022, 74, 103088. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, Y.; Zhang, F.; Sun, Z.; Wang, C. A high-sensitivity FBG accelerometer and application for flow monitoring in oil wells. Opt. Fiber Technol. 2022, 74, 103128. [Google Scholar] [CrossRef]
- Jackson, P.; Foster, S.; Goodman, S. A fibre laser acoustic vector sensor. In Proceedings of the 20th International Conference on Optical Fibre Sensors, Edinburgh, UK, 5 October 2009. [Google Scholar] [CrossRef]
- Zhang, W.; Ma, R.; Li, F. High performance ultrathin fiber laser vector hydrophone. J. Lightwave Technol. 2011, 30, 1196–1200. [Google Scholar] [CrossRef]
- Ma, R.; Zhang, W.; Li, F. Two-axis slim fiber laser vector hydrophone. IEEE Photonics Technol. Lett. 2011, 23, 335–337. [Google Scholar] [CrossRef]
- Liu, F.; Pan, S.; Xie, B.; Pan, Y.; Gu, L.; He, X.; Yi, D.; Chen, Z.; Zhang, M. Design and field test of reusable fiber-optic microseismic monitoring system. In Proceedings of the 26th International Conference on Optical Fiber Sensors, OSA Technical Digest, Lausanne, Switzerland, 24–28 September 2018. [Google Scholar] [CrossRef]
- Liu, F.; Xie, S.; Zhang, M.; Xie, B.; Pan, Y.; He, X.; Yi, D.; Gu, L.; Yang, Y. Downhole microseismic monitoring using time-division multiplexed fiber-optic accelerometer array. IEEE Access 2020, 8, 120104–120113. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, W.; Huang, J.; Li, F. Demonstration of multi-channel fiber optic interrogator based on time-division locking technique in subway intrusion detection. Opt. Express 2020, 28, 11472–11481. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Luo, H.; Chen, Y.; Meng, Z. A four-element optical fiber 4C vector hydrophone array. In Proceedings of the 22nd International Conference on Optical Fiber Sensor, Beijing, China, 7 November 2012. [Google Scholar] [CrossRef]
- Huang, S.; Wang, J.; Chen, M.; Meng, Z. Experimental study of the resonant frequency of an optical fiber vector sensor with different packages. In Proceedings of the 2019 18th International Conference on Optical Communications and Networks (ICOCN), Huangshan, China, 5–8 August 2019. [Google Scholar] [CrossRef]
- Liang, Y.; Meng, Z.; Chen, Y.; Zhang, Y.; Wang, M.; Zhou, X. A data fusion orientation algorithm based on the weighted histogram statistics for vector hydrophone vertical array. Sensors 2020, 20, 5619. [Google Scholar] [CrossRef] [PubMed]
- Hydrophones, fundamental features, design considerations, and various structures: A review. Sens. Actuators A 2021, 329, 112790. [CrossRef]
- Leslie, C.B.; Kendall, J.M.; Jones J, L. Hydrophone for measuring particle velocity. J. Acoust. Soc. Am. 1956, 28, 711–715. [Google Scholar] [CrossRef]
- McConnell, J.A. Analysis of a compliantly suspended acoustic velocity sensor. J. Acoust. Soc. Am. 2003, 113, 1395–1405. [Google Scholar] [CrossRef] [PubMed]
- Abraham, B.M. Ambient noise measurements with vector acoustic hydrophones. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 June 2006. [Google Scholar] [CrossRef]
- Clark, J.A.; Tarasek, G. Localization of radiating sources along the hull of a submarine using a vector sensor array. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 June 2006. [Google Scholar] [CrossRef]
- McEachern, J.F.; McConnell, J.A.; Jamieson, J.; Trivett, D. ARAP-deep ocean vector sensor research array. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 June 2006. [Google Scholar] [CrossRef]
- Jin, M.; Ge, H.; Li, D.; Ni, C. Three-component homovibrational vector hydrophone based on fiber Bragg grating FP interferometry. Opt. Express 2018, 57, 9195–9202. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, J.; Ma, L.; Wu, Y.; Xu, P.; Hu, Z. Experimental Research of a Separate Type Fiber Optic Vector Hydrophone based on FBG Accelerometers. In Proceedings of the 26th International Conference on Optical Fiber Sensors, OSA Technical Digest, Lausanne, Switzerland, 24–28 September 2018. [Google Scholar] [CrossRef]
- Wage, K.E.; Farrokhrooz, M.; Dzieciuch, M.A.; Worcester, P. Analysis of the vertical structure of deep ocean noise using measurements from the SPICEX and PhilSea experiments. In Proceedings of the Meetings on Acoustics, ICA 2013, Montreal, QC, Canada, 2–7 June 2013. [Google Scholar] [CrossRef]
- Worcester, P.F.; Dzieciuch, M.A.; Mercer, J.A.; Andrew, R.K.; Dushaw, B.D.; Baggeroer, A.B.; Heaney, K.D.; D’Spain, G.L.; Colosi, J.A.; Stephen, R.A.; et al. The north pacific acoustic laboratory deep-water acoustic propagation experiments in the philippine sea. J. Acoust. Soc. Am. 2013, 134, 3359–3375. [Google Scholar] [CrossRef] [PubMed]
- Farrokhrooz, M.; Wage, K.E.; Dzieciuch, M.A.; Worcester, P.F. Vertical line array measurements of ambient noise in the North Pacific. J. Acoust. Soc. Am. 2017, 141, 1571–1581. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rao, S.S. Mechanical Vibrations, 5th ed.; Prentice Hall: Hoboken, NJ, USA, 2010. [Google Scholar]
- Zhang, Y.; Hu, X.; Liu, Y.; Chen, M.; Zhao, G.; Liang, Y.; Lu, Y.; Meng, Z.; Wang, J. The phase noise transfer model in the phase-generated-carrier-based interferometric fiber-optic sensor. IEEE Sens. J. 2022, 22, 14151–14164. [Google Scholar] [CrossRef]
- National Technical Specification for Metrology of PRC: Calibration Specification for Vector Hydrophones in Frequency Range 20 Hz to 2000 Hz. Available online: http://jjg.spc.org.cn/resmea/standard/JJF%25201340-2012/? (accessed on 2 October 2022).










| Suspension System | Direction | 20 Hz | 50 Hz | 100 Hz | 250 Hz |
|---|---|---|---|---|---|
| One-stage | X | −16.93 | −30.91 | −50.48 | −43.12 |
| Y | −16.52 | −29.36 | −37.11 | −48.22 | |
| Z | −8.77 | −26.45 | −35.95 | −33.89 | |
| Two-stage | X | −40.17 | −64.27 | −81.10 | −73.29 |
| Y | −40.10 | −64.39 | −72.11 | −80.82 | |
| Z | −16.99 | −52.00 | −61.85 | −60.01 | |
| X | −23.24 | −33.36 | −30.62 | −30.17 | |
| Y | −23.58 | −35.06 | −35.00 | −32.60 | |
| Z | −8.22 | −25.55 | −25.90 | −26.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Meng, Z.; Wang, J.; Chen, M.; Liang, Y.; Hu, X. The Two-Stage Suspension System of the Fiber Optic Vector Hydrophone for Isolating the Vibration from the Mooring Rope. Sensors 2022, 22, 9261. https://doi.org/10.3390/s22239261
Zhang Y, Meng Z, Wang J, Chen M, Liang Y, Hu X. The Two-Stage Suspension System of the Fiber Optic Vector Hydrophone for Isolating the Vibration from the Mooring Rope. Sensors. 2022; 22(23):9261. https://doi.org/10.3390/s22239261
Chicago/Turabian StyleZhang, Yichi, Zhou Meng, Jianfei Wang, Mo Chen, Yan Liang, and Xiaoyang Hu. 2022. "The Two-Stage Suspension System of the Fiber Optic Vector Hydrophone for Isolating the Vibration from the Mooring Rope" Sensors 22, no. 23: 9261. https://doi.org/10.3390/s22239261