Author Contributions
Conceptualization, D.A. and R.C.; Methodology, D.A. and R.C.; Software, D.A. and R.C.; Validation, D.A. and R.C.; Formal analysis, D.A. and R.C.; Investigation, D.A. and R.C.; Data curation, D.A. and R.C.; Writing—original draft, D.A.; Writing—review & editing, D.A. and R.C.; Visualization, D.A. and R.C.; Supervision, R.C. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Three axes reel (top), two axes and single axes reel (middle), external two axes reel (bottom).
Figure 1.
Three axes reel (top), two axes and single axes reel (middle), external two axes reel (bottom).
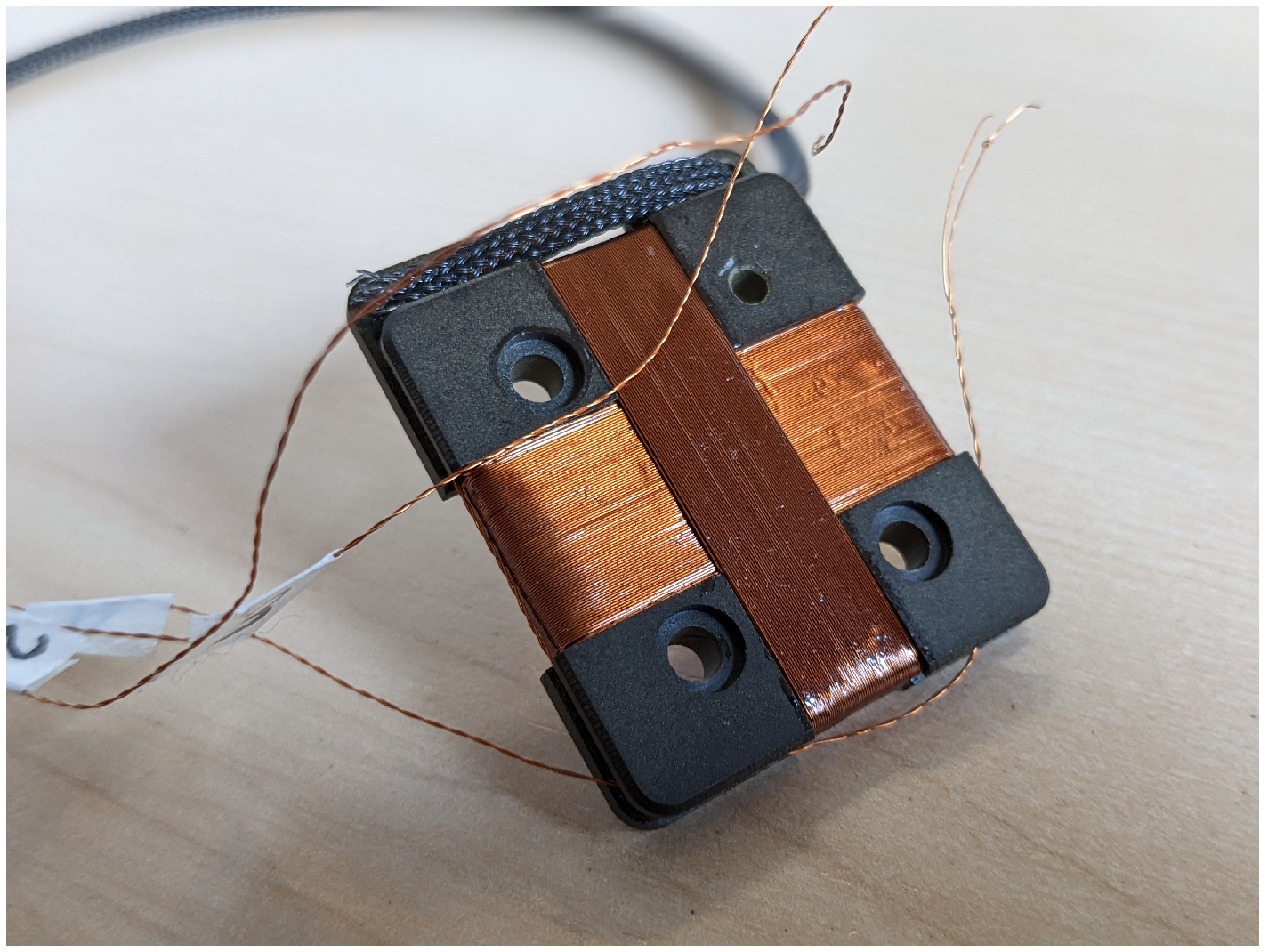
Figure 2.
Three axes (3AX) pick-up coil sensor prototype.
Figure 2.
Three axes (3AX) pick-up coil sensor prototype.
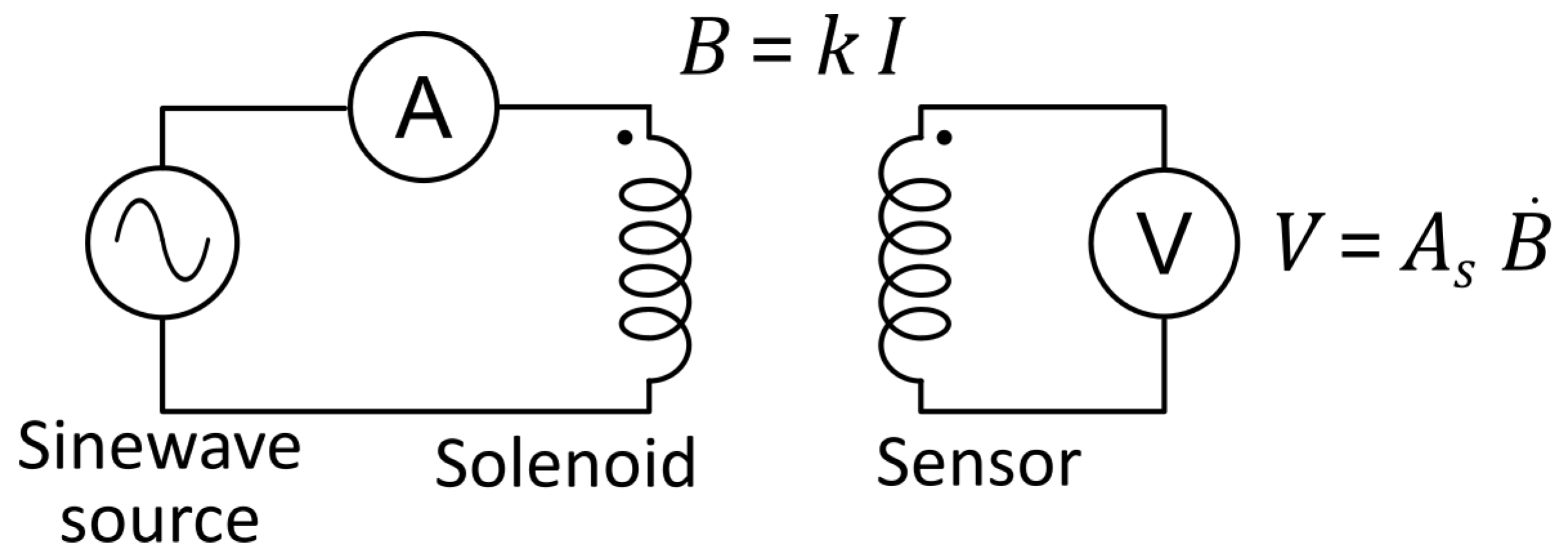
Figure 3.
Schematic of the basic principle of the measure.
Figure 3.
Schematic of the basic principle of the measure.
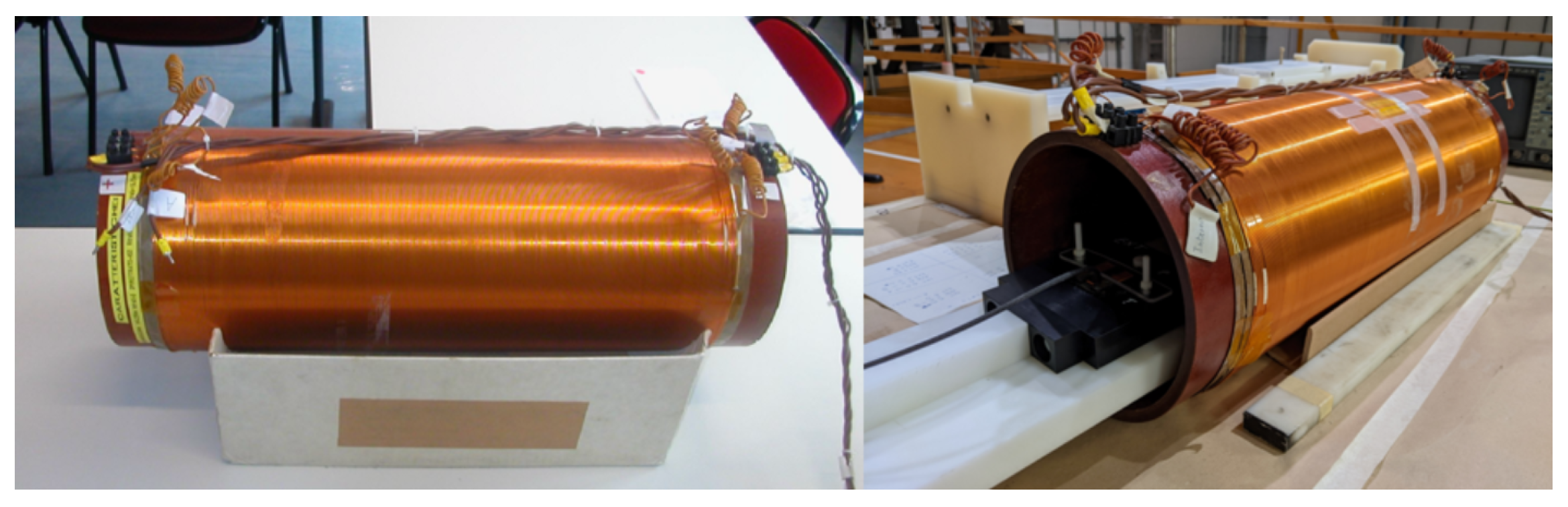
Figure 4.
Finite rectilinear uniform solenoid adopted as source of reference magnetic field.
Figure 4.
Finite rectilinear uniform solenoid adopted as source of reference magnetic field.
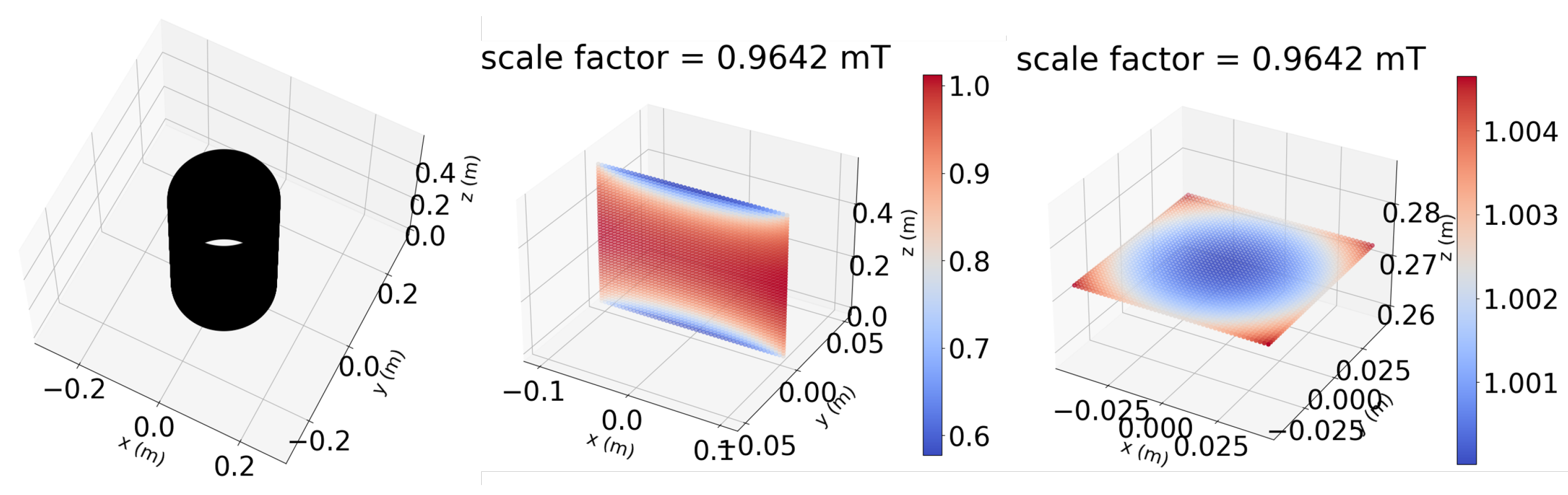
Figure 5.
Geometry of the solenoid (left), magnetic field on the xz plane (center) and magnetic field on the xy plane (right).
Figure 5.
Geometry of the solenoid (left), magnetic field on the xz plane (center) and magnetic field on the xy plane (right).
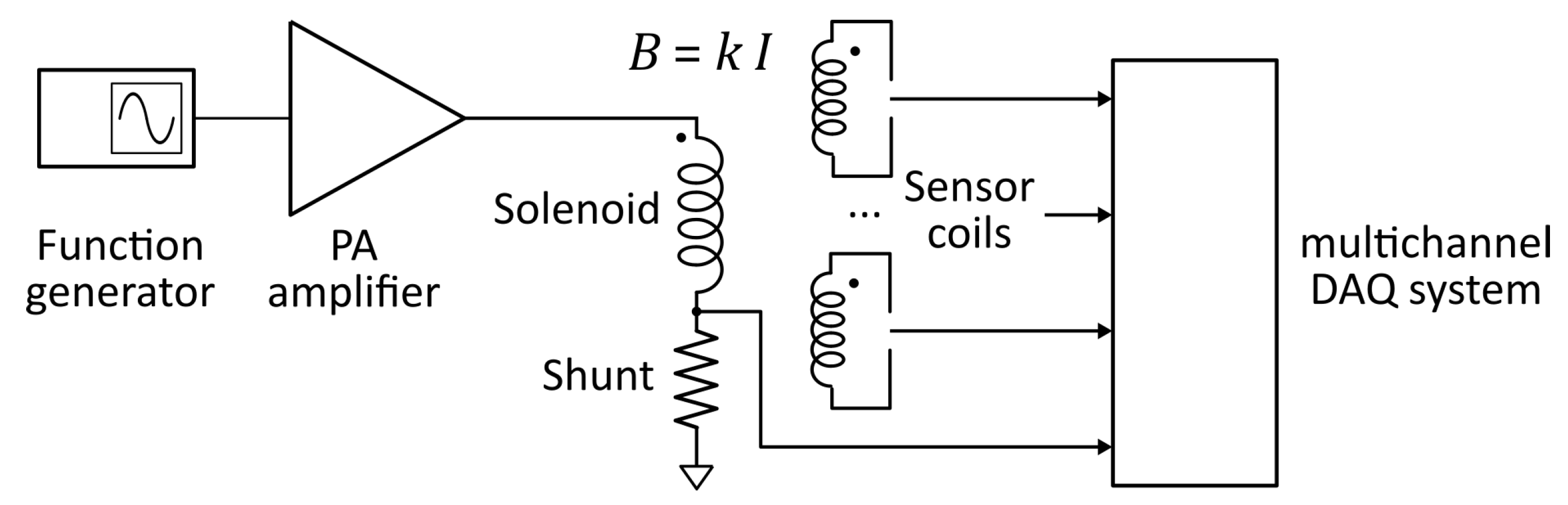
Figure 6.
Realized electrical measurement setup.
Figure 6.
Realized electrical measurement setup.
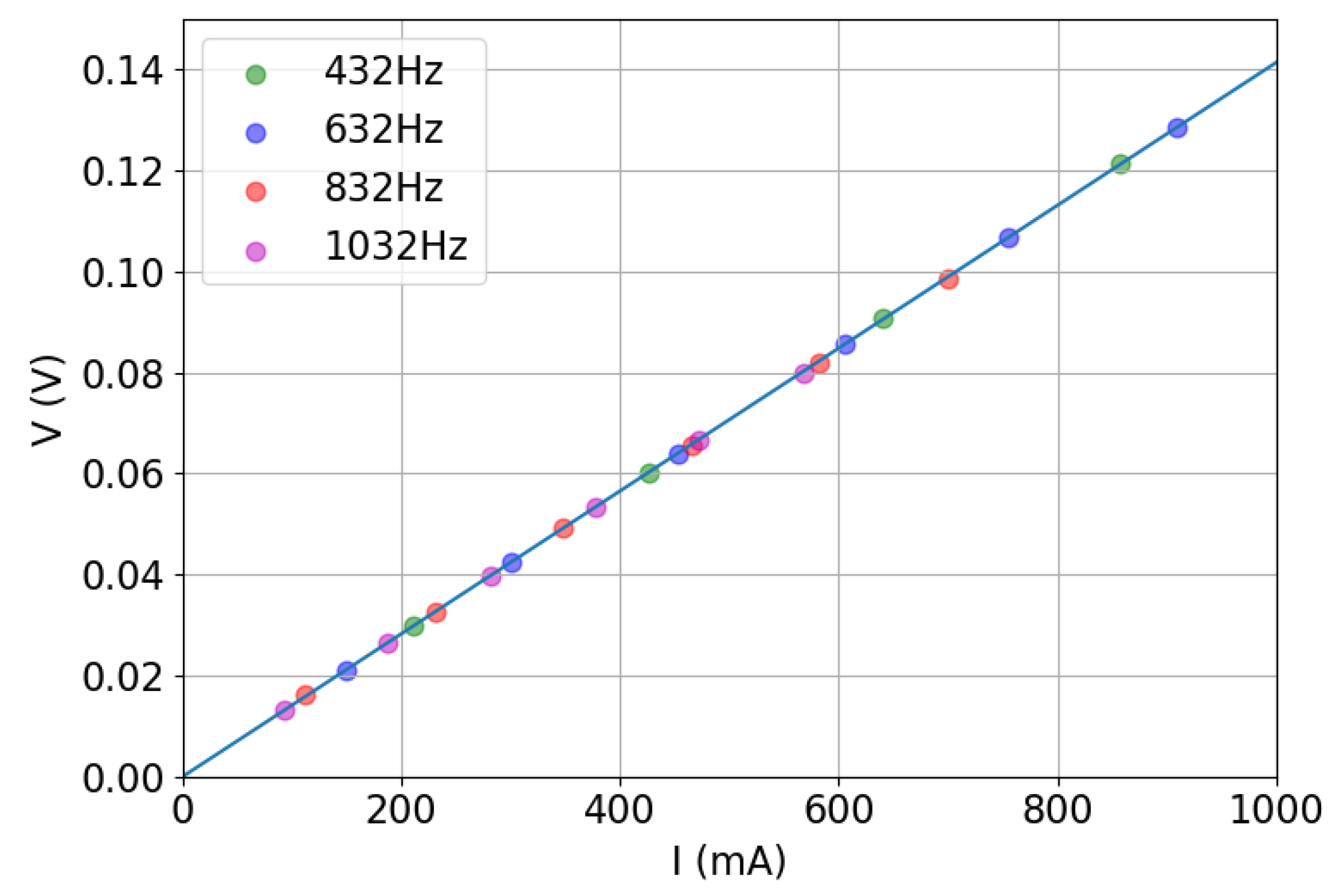
Figure 7.
V-I relation for the shunt calibration with the multimeter.
Figure 7.
V-I relation for the shunt calibration with the multimeter.
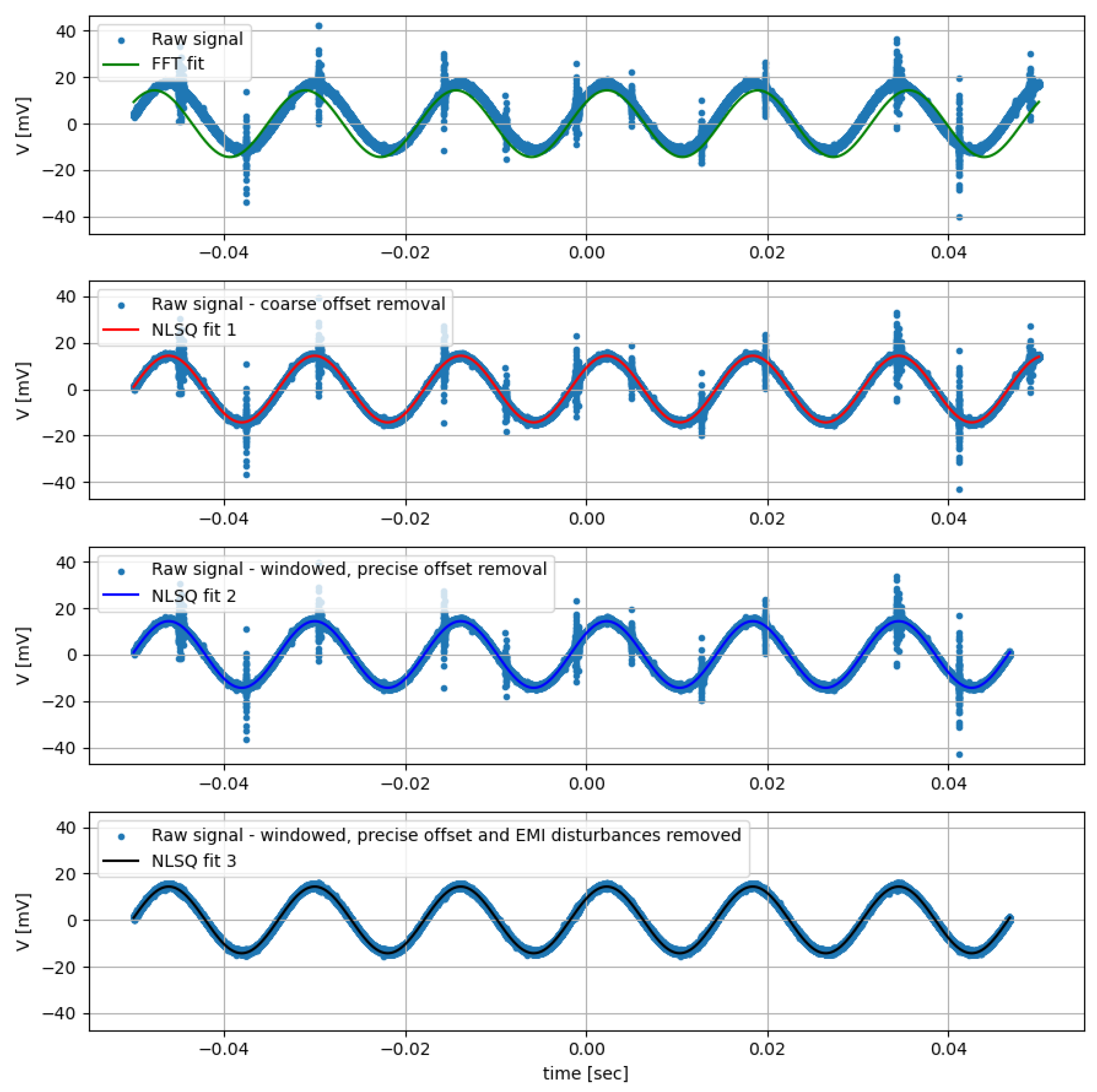
Figure 8.
Example of the four steps used to recover the fundamental amplitude from an acquired signal.
Figure 8.
Example of the four steps used to recover the fundamental amplitude from an acquired signal.
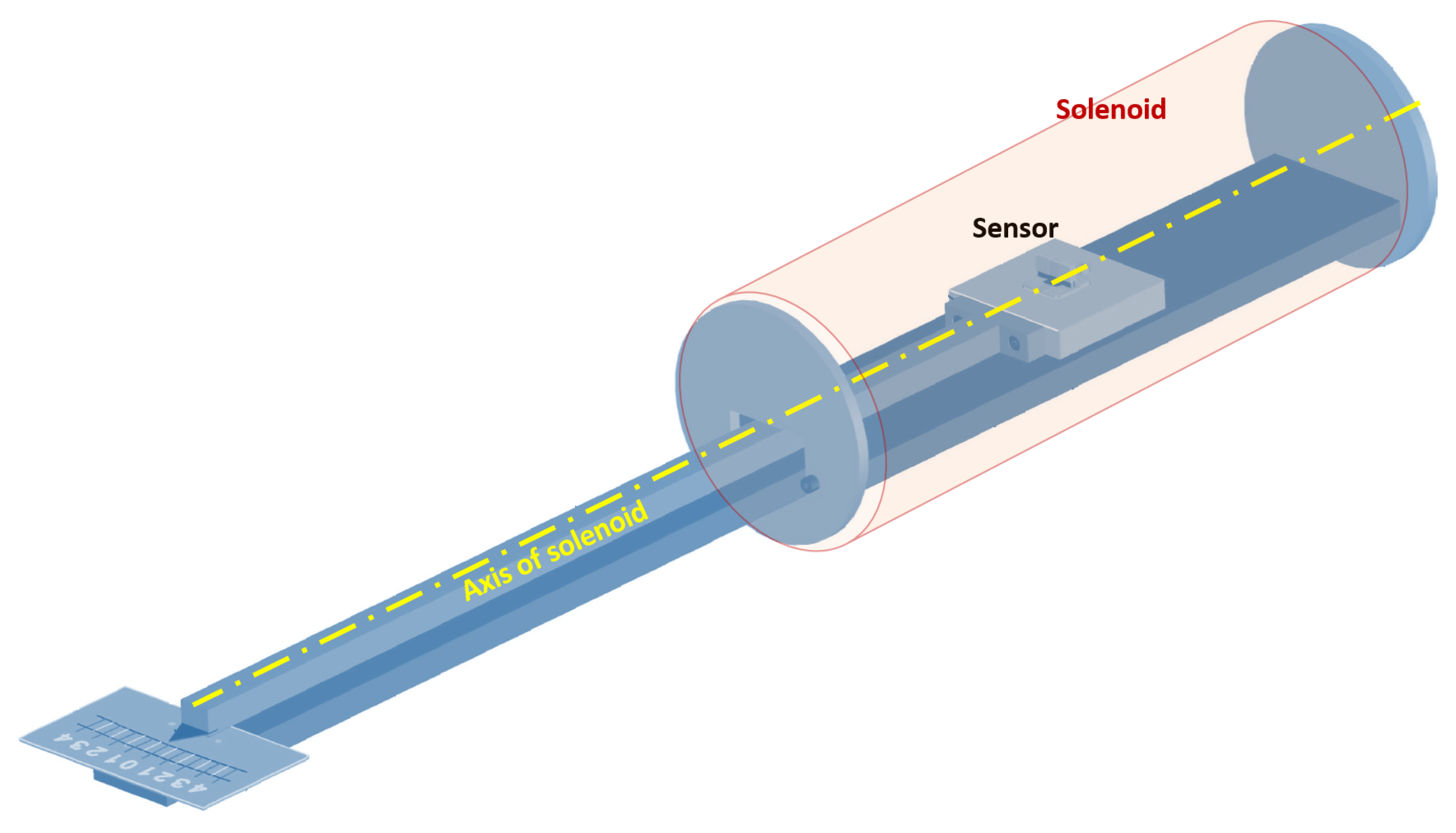
Figure 9.
Representation of the support for the measurements performed at different angles of rotation.
Figure 9.
Representation of the support for the measurements performed at different angles of rotation.
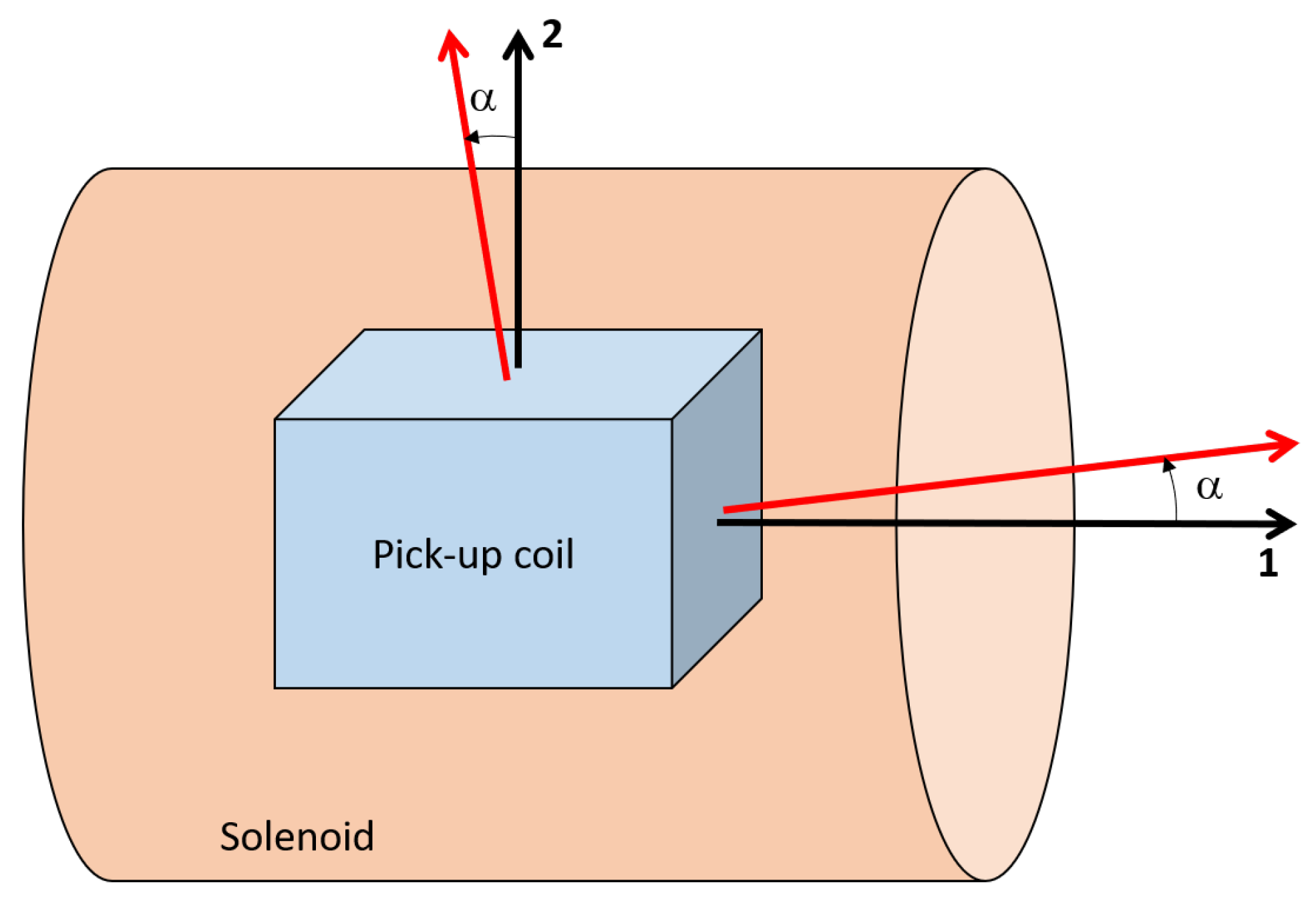
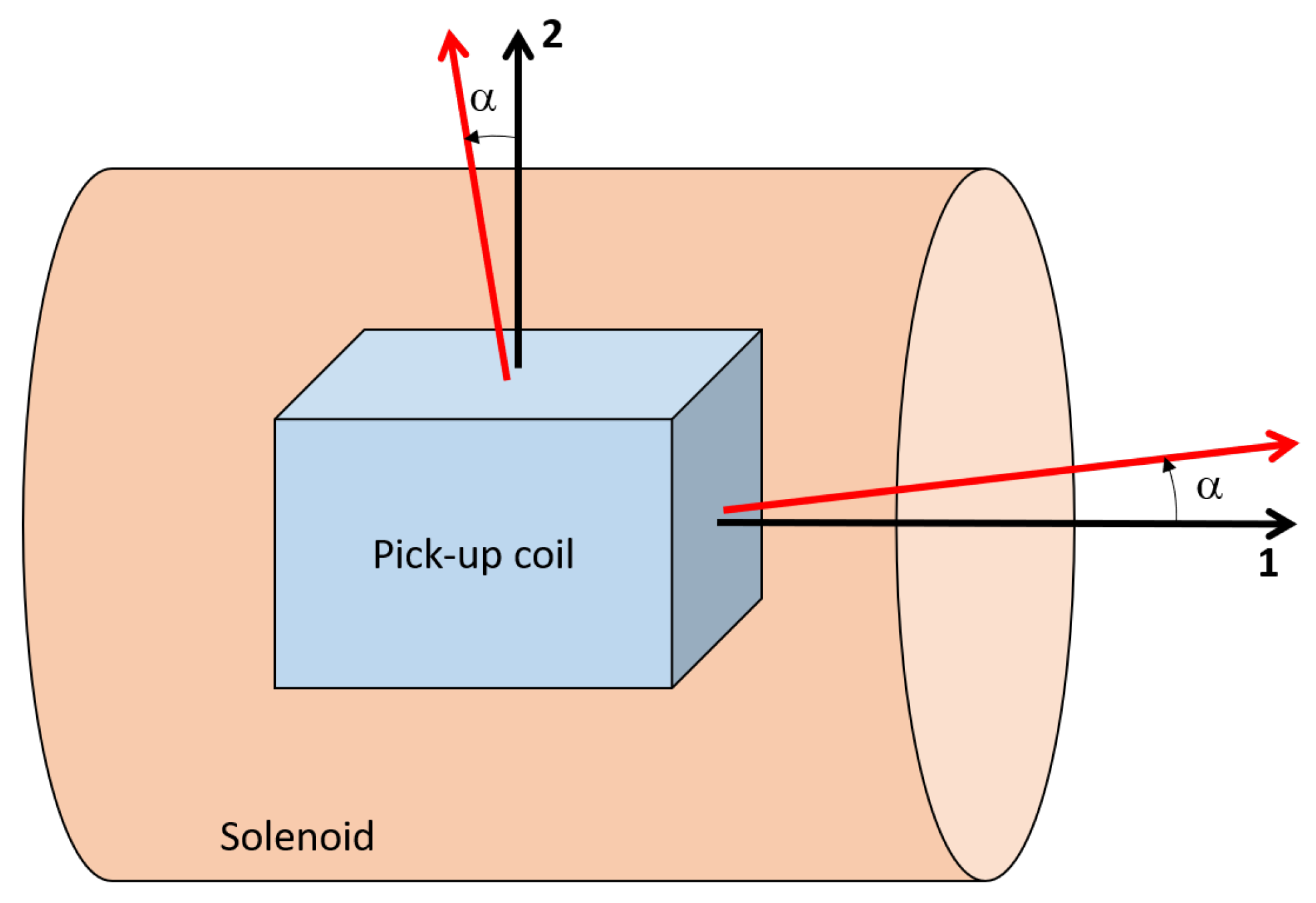
Figure 10.
Graphic representation of the solenoid and the sensor with the related axes in black and red, respectively.
Figure 10.
Graphic representation of the solenoid and the sensor with the related axes in black and red, respectively.
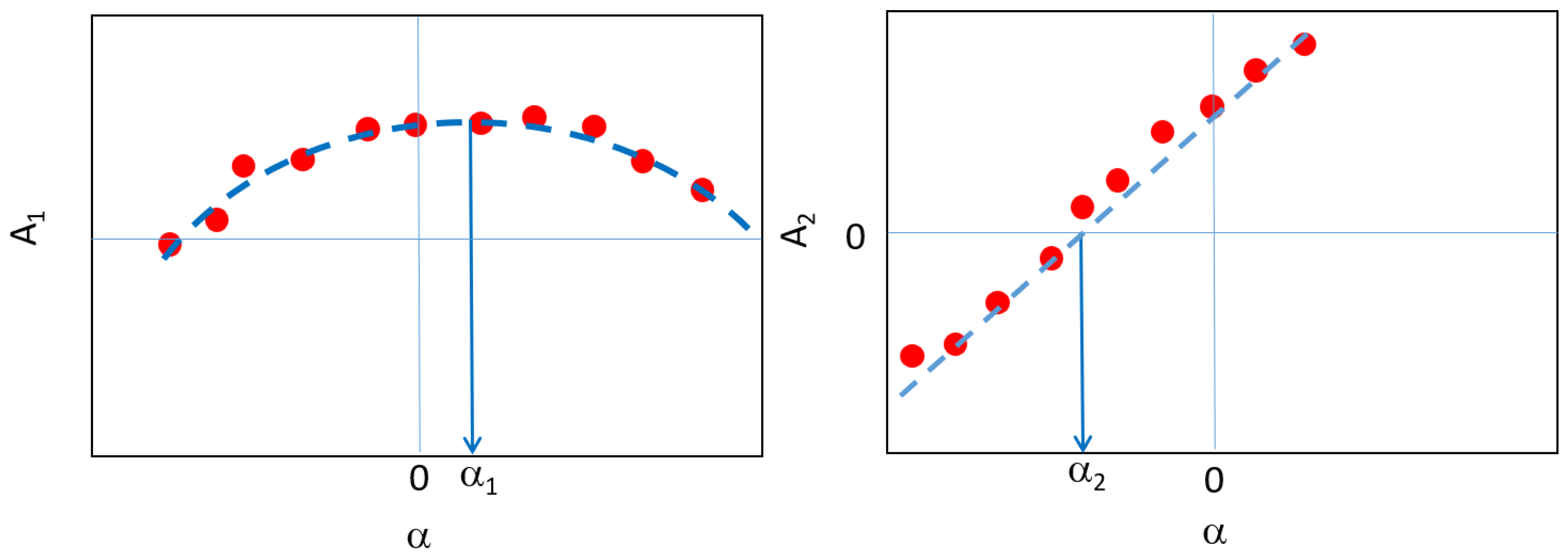
Figure 11.
Representation of the effective area dependence with the rotation angle for the two directions of measurements (, ): the affective area and the angle of misalignment are identified from best-fit of measurements.
Figure 11.
Representation of the effective area dependence with the rotation angle for the two directions of measurements (, ): the affective area and the angle of misalignment are identified from best-fit of measurements.
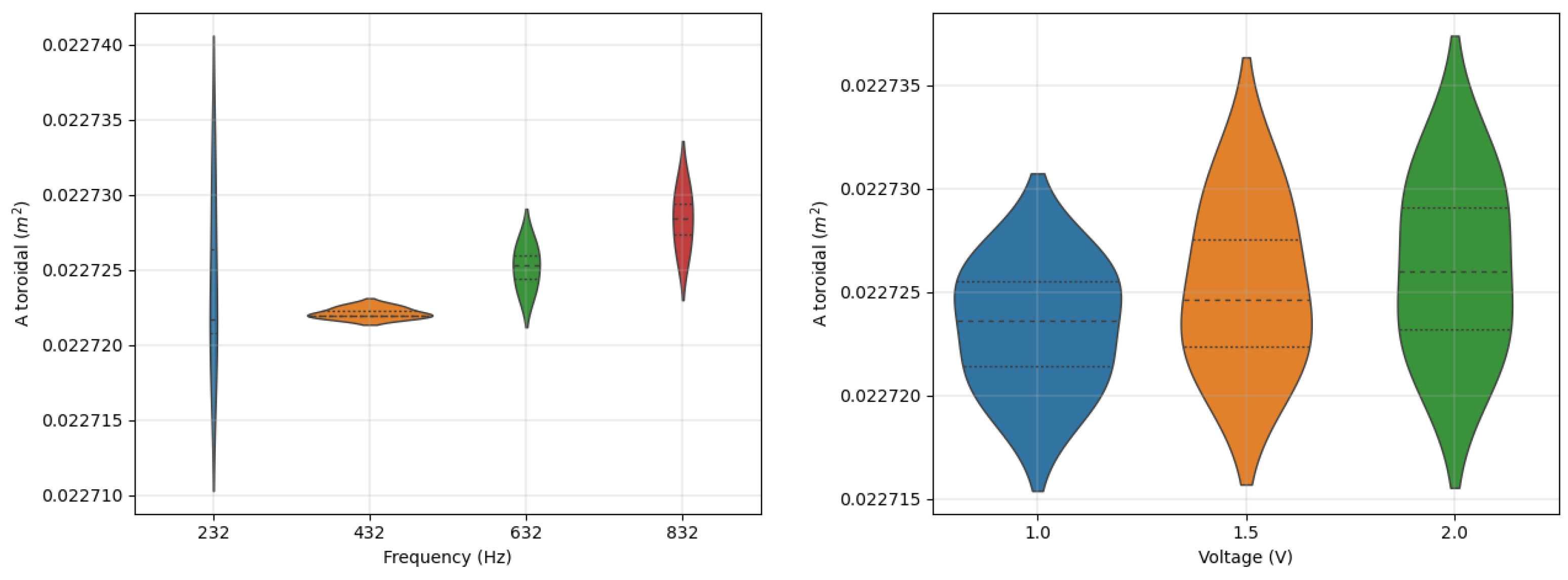
Figure 12.
Violinplot for the effective area measurements of the 3AX toroidal winding as function of frequency (voltage variability) and voltage (frequency variability).
Figure 12.
Violinplot for the effective area measurements of the 3AX toroidal winding as function of frequency (voltage variability) and voltage (frequency variability).
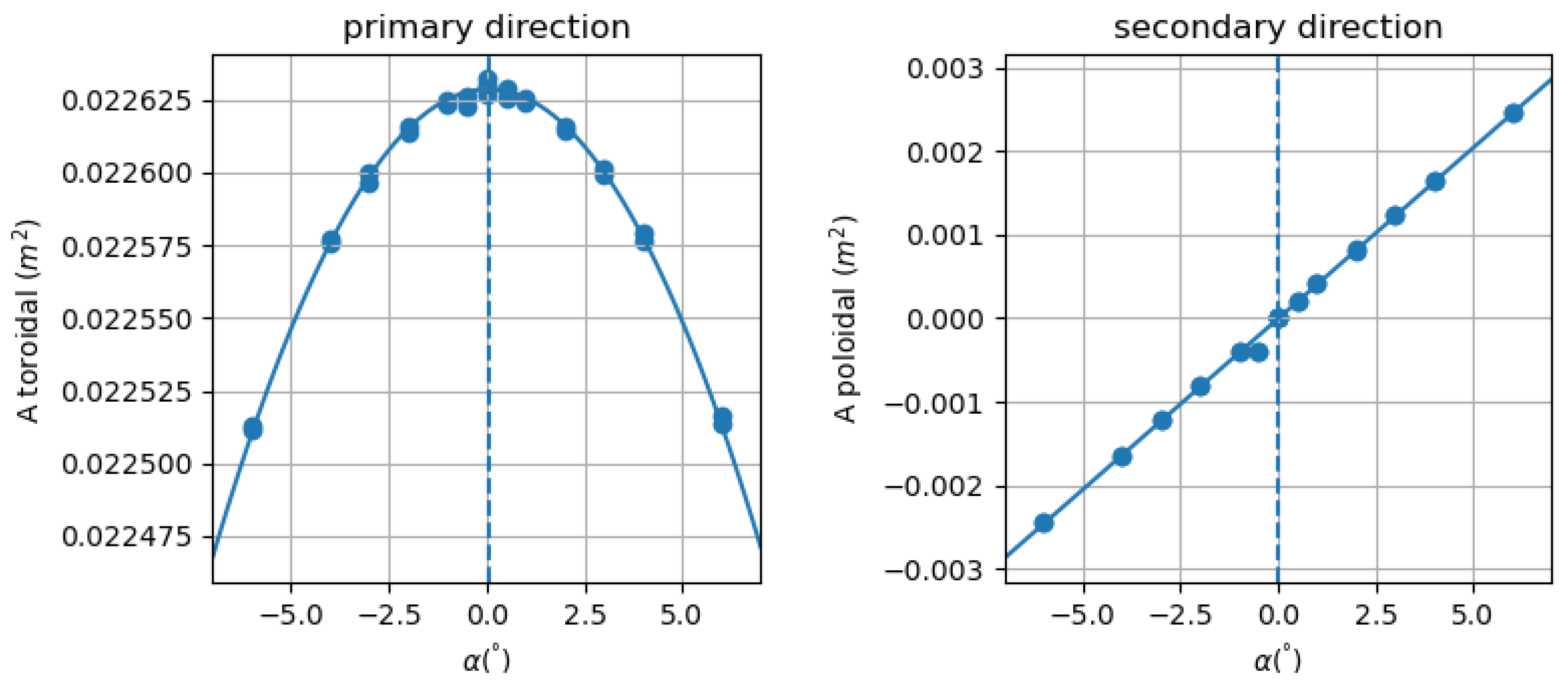
Figure 13.
Toroidal (primary, left) and poloidal (secondary, right) effective area values as a function of the angle of rotation for the 3AX sensor; the angle of misalignment is represented by the vertical dashed line.
Figure 13.
Toroidal (primary, left) and poloidal (secondary, right) effective area values as a function of the angle of rotation for the 3AX sensor; the angle of misalignment is represented by the vertical dashed line.
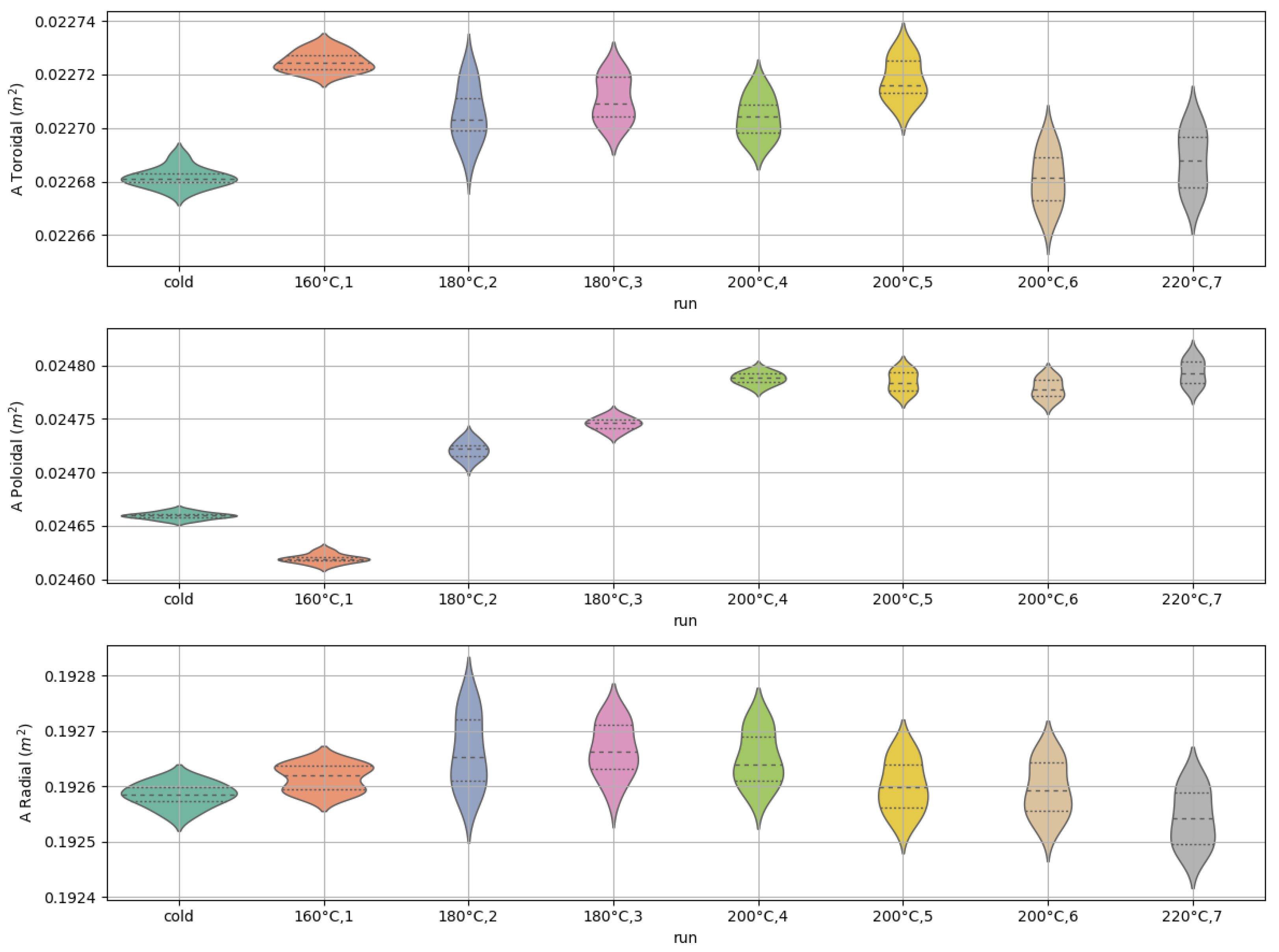
Figure 14.
Effective area of each winding for the 3AXE prototype as a function of thermal cycles; the violin plot is obtained on different measurements performed in frequency and voltage.
Figure 14.
Effective area of each winding for the 3AXE prototype as a function of thermal cycles; the violin plot is obtained on different measurements performed in frequency and voltage.
Table 1.
Main features of each pick-up coil sensor including the geometric area: the radial, poloidal, and toroidal axes of measurements are denoted as r, p, and t, respectively.
Table 1.
Main features of each pick-up coil sensor including the geometric area: the radial, poloidal, and toroidal axes of measurements are denoted as r, p, and t, respectively.
| Sensor | Axis | Turns | Layers | Diameter | Length | Geometric Area () | Self-Inductance |
|---|
| 3AX | r | 180 | 1 | 0.18 | 20 | 0.15756 | 183.4 |
| p | 152 | 2 | 0.18 | 12 | 0.02552 | 226.4 |
| t | 106 | 2 | 0.18 | 9.5 | 0.02341 | 2.6 mH |
| 2AXH | p | 14 | 2 | 0.224 | 1.1 | 0.00303 | 7.4 |
| t | 106 | 2 | 0.18 | 9.5 | 0.02341 | 183.3 |
| 1AX | t | 106 | 2 | 0.18 | 9.5 | 0.02341 | 183.33 |
| 2AXE | p | 152 | 2 | 0.18 | 11.2 | 0.02353 | 209.4 |
| t | 106 | 2 | 0.18 | 9.5 | 0.02341 | 183.3 |
Table 2.
Main parameters of the external layer of the solenoid.
Table 2.
Main parameters of the external layer of the solenoid.
| Length L | 545 mm |
| Number turns | 453 |
| Radius r | mm |
| On-axis magnetic field for of current | mT |
| Equivalent inductance | mH |
| Equivalent parallel capacitance | pF |
| Equivalent resistance | |
Table 3.
Impact of the geometrical variations of the solenoid geometry on the on-axis magnetic field with numerical and analytical method.
Table 3.
Impact of the geometrical variations of the solenoid geometry on the on-axis magnetic field with numerical and analytical method.
| | | Reference | L + 0.5 mm | L − 0.5 mm | r + 0.25 mm | r − 0.25 mm | e = 0.07 |
|---|
| Numerical | B(mT) | 0.96422 | 0.96347 | 0.96497 | 0.96390 | 0.96453 | 0.96440 |
| (%) | - | −0.078 | 0.078 | −0.033 | 0.033 | 0.018 |
| Analytical | B(mT) | 0.96421 | 0.96346 | 0.96497 | 0.96390 | 0.96453 | - |
| (%) | - | −0.078 | 0.078 | −0.033 | 0.033 | - |
Table 4.
Linear regression fit results for the shunt calibration.
Table 4.
Linear regression fit results for the shunt calibration.
| Slope | Intercept | | p-Value | Slope Std. Error | Intercept Std. Error |
|---|
| 0.100029 | 5.6 | 0.999993 | 2.1 | 7.1 | 3.932005 |
Table 5.
Fit results for the low-frequency test case.
Table 5.
Fit results for the low-frequency test case.
| | Value | |
|---|
| 14.3548 | 0.0024 |
| f | 61.99604 | 0.00027 |
| −0.87750 | 0.00017 |
Table 6.
Different source of errors and their relative percentage impact in measuring the effective area.
Table 6.
Different source of errors and their relative percentage impact in measuring the effective area.
| Source of Error | (%) |
|---|
| Shunt | 0.03 |
| Solenoid | 0.08 |
| Angle misalignment | 0.0013 |
| Frequency | 0.05 |
| Voltage | 0.05 |
Table 7.
Number and conditions of applied thermal cycles for each sensor prototype.
Table 7.
Number and conditions of applied thermal cycles for each sensor prototype.
| | Thermal Cycles, T (°C) |
|---|
| Sensor | #1 | #2 | #3 | #4 | #5 | #6 | #7 |
|---|
| 3AXC | 160 | 160 | 180 | 180 | 200 | 200 | 200 |
| 3AXE | 160 | 180 | 180 | 200 | 200 | 200 | 220 |
| 3AXF | 160 | 180 | 180 | 200 | 200 | 200 | - |


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}