




Landscape Classification System Based on RKM Clustering for Soil Survey UAV Images–Case Study of the Small Hilly Areas in Jurong City

Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Collection and Data Pre-Processing
2.3. Selection and Classification of Landscape Factors
2.4. Rough K-Means Clustering
2.5. Kappa Coefficient
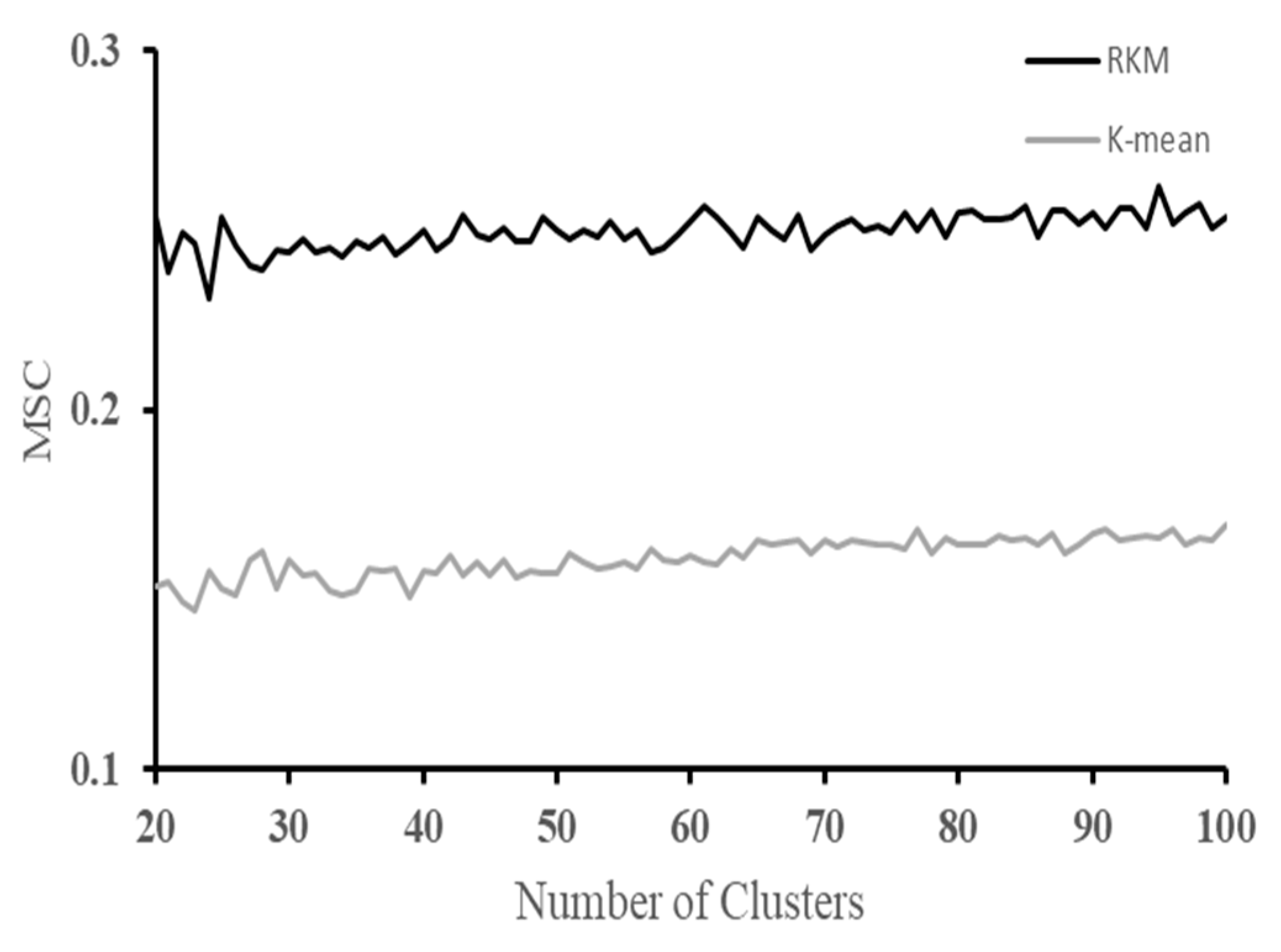
2.6. Silhouette Coefficient
2.7. Determination of the Optimal Number of Clusters
3. Results and Analysis
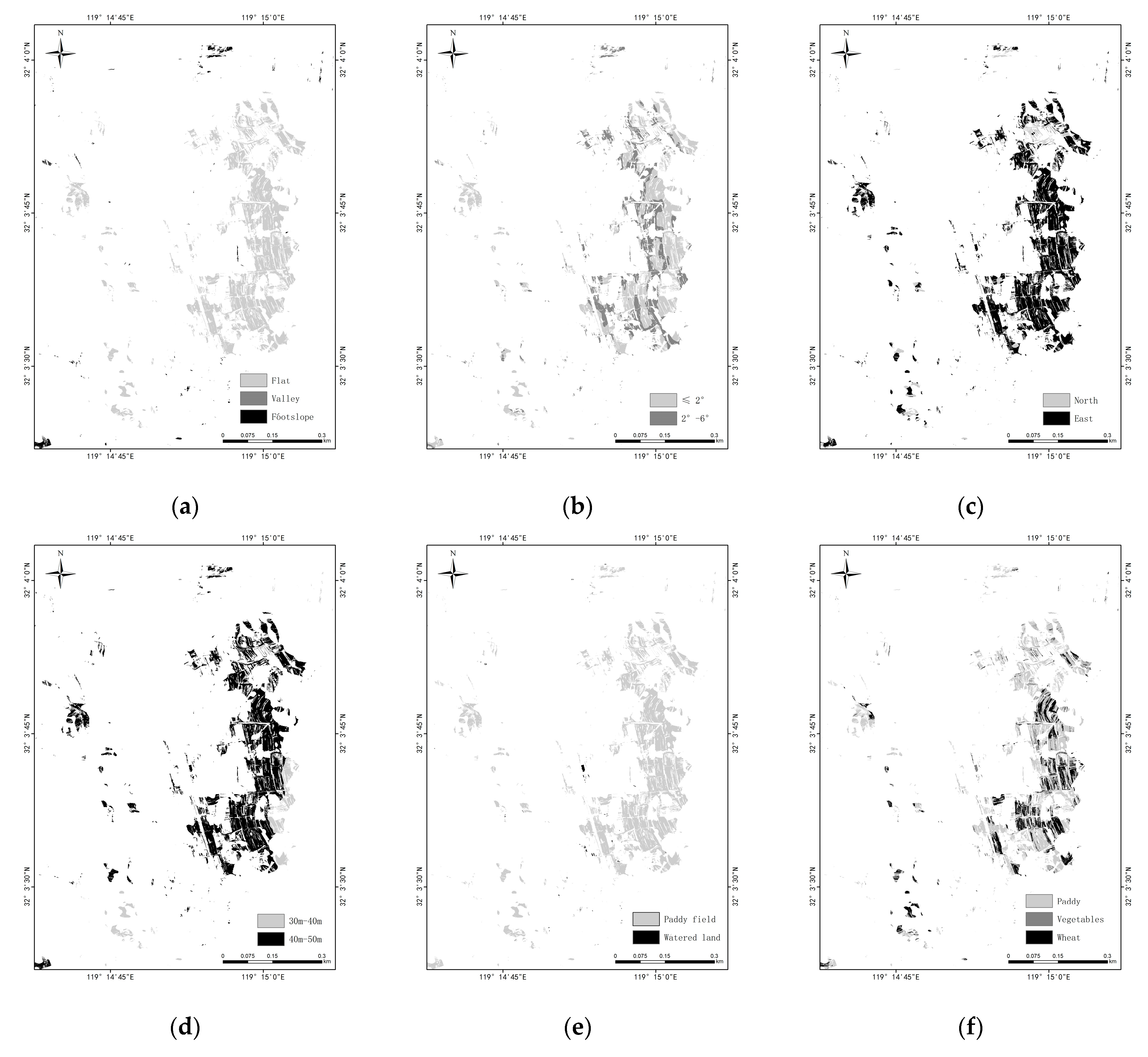
3.1. Classification and Evaluation of Landscape Factors
3.2. Landscape Classification
3.3. Landscape Outcome Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, H.Z. On the principles and methods of soil mapping-an example of Xuanlang Guang sample area in Anhui Province. Chin. J. Soil Sci. 2002, 02, 86–89. [Google Scholar]
- Nikiforova, A.A.; Bastian, O.; Fleis, M.E.; Nyrtsov, M.V.; Khropov, A.G. Theoretical development of a natural soil-landscape classification system: An interdisciplinary approach. Catena 2019, 177, 238–245. [Google Scholar] [CrossRef]
- Wang, H.Q. Preliminary Study on the Soil Series Investigation Methods in Hilly Area by Using Soil-Landscape Models. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2015. [Google Scholar]
- Zhang, P.Y. Study on Soil Series Investigation Method in Plain Agricultural Areas Based on Soil-Landscape Relationship. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2019. [Google Scholar]
- Bai, H.R. Predictive Mapping of Stagnic Anthrosols Soil Series and Evaluation of Regional Soil Fertility in Plain Agricultural. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2020. [Google Scholar]
- Nikiforova, A.A.; Fleis, M.E.; Kazantsev, N.N. Multi-scale soil-landscape maps as the basis of geographic information systems for soil melioration. IOP Conf. Ser. Earth Environ. Sci. 2019, 368, 012038. [Google Scholar] [CrossRef] [Green Version]
- Nikiforova, A.A.; Fleis, M.E.; Nyrtsov, M.V.; Kazantsev, N.N.; Kim, K.V.; Belyonova, N.K.; Kim, J.K. Problems of modern soil mapping and ways to solve them. Catena 2020, 195, 104885. [Google Scholar] [CrossRef]
- Pan, J.J.; Cao, L.D.; Li, Z.F. A Guideline for Soil Series Survey in Hilly Area; Phoenix Education Publishing, Ltd.: Nanjing, China, 2017. [Google Scholar]
- Zhu, Y.L.; Wang, D.Y.; Zhang, H.; Shi, P. Soil organic carbon content retrieved by UA V-borne high resolution spectrometer. Trans. Chin. Soc. Agric. Eng. 2021, 37, 66–72. [Google Scholar]
- Yang, N.; Cui, W.X.; Zhang, Z.T.; Zhang, J.R.; Chen, J.Y.; Du, R.Q.; Lao, C.C.; Zhou, Y.C. Soil salinity inversion at different depths using improved spectral index with UAV multispectral remote sensing. Trans. Chin. Soc. Agric. Eng. 2020, 36, 13–21. [Google Scholar]
- Ma, J.; Liu, W.H.; Jin, C.L.; Gong, K.; Liu, Z.B.; Li, Y.; Li, J.X.; Wang, S.J.; Lei, Y.X. Identification of Grassland Plants by UAV Multispectral Remote Sensing Based on CNN and SVM. Acta Agrestia Sin. 2022, 30, 3165–3174. [Google Scholar]
- Yan, G.; Li, L.; Coy, A.; Mu, X.; Zhou, H. Improving the estimation of fractional vegetation cover from UAV RGB imagery by colour unmixing. ISPRS J. Photogramm. Remote Sens. 2019, 158, 23–34. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Liu, W.; Li, X.H.; Zhu, J.X.; Zhang, H.T.; Yang, D.; Xu, C.H.; Xu, X.L. The spatial distribution pattern of rock in rocky desertification area based on unmanned aerial vehicle imagery and object-oriented classification method. J. Geo-Inf. Sci. 2020, 22, 2436–2444. [Google Scholar]
- Gao, S.; Yuan, X.P.; Gan, S.; Yang, M.L.; Yuan, X.Y.; Luo, W.D. Fusion of UAV image and LiDAR point cloud to study the detection technology of mountain surface cover landscape characteristics. Bull. Surv. Mapp. 2022, 1, 110–115. [Google Scholar]
- Zhang, S.Y.; Li, Z.F.; Xu, F.; Pan, J.J.; Jiang, X.X.; Zhang, W.M. Optimization of estuary wetland landscape classification based on multi-temporal UAV images. Chin. J. Ecol. 2020, 39, 3174–3184. [Google Scholar]
- Hu, B. Deep Learning Image Feature Recognition Algorithm for Judgment on the Rationality of Landscape Planning and Design. Complexity 2021, 2021, 1–15. [Google Scholar] [CrossRef]
- Lv, J.J.; Ma, T.; Dong, Z.W.; Yao, Y.; Yuan, Z.H. Temporal and Spatial Analyses of the Landscape Pattern of Wuhan City Based on Remote Sensing Images. Int. J. Geo-Inf. 2018, 7, 340. [Google Scholar] [CrossRef] [Green Version]
- Jonatan, A.G. Propuesta metodológica para la identificación, caracterización y cualificación de los paisajes: La cuenca endorreica de Padul (Andalucía) como caso de estudio. Boletín Asoc. Geógrafos Españoles 2019, 80, 5. [Google Scholar]
- Harrison, K.R.; Ombuki-Berman, B.M.; Engelbrecht, A.P. Visualizing and Characterizing the Parameter Configuration Landscape of Differential Evolution using Physical Landform Classification. In Proceedings of the IEEE Symposium Series on Computational Intelligence, Canberra, ACT, Australia, 1–4 December 2020; pp. 2437–2444. [Google Scholar]
- Gao, B.; Huang, Q.; He, C.; Sun, Z.; Zhang, D. How does sprawl differ across cities in China? A multi-scale investigation using nighttime light and census data. Landsc. Urban Plan. 2016, 148, 89–98. [Google Scholar] [CrossRef]
- Lu, H.D. Landscape Classification at A Small Area for Soil Series Survey and Mapping. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2014. [Google Scholar]
- Simensen, T.; Halvorsen, R.; Erikstad, L. Methods for landscape characterization and mapping: A systematic review. Land Use Policy 2018, 75, 557–569. [Google Scholar] [CrossRef]
- Chmielewski, T.J.; Butler, A.; Kułak, A.; Chmielewski, S. Landscape’s physiognomic structure: Conceptual development and practical applications. Landsc. Res. 2017, 43, 410–427. [Google Scholar] [CrossRef]
- Michalik-Śnieżek, M.; Chmielewski, S.; Chmielewski, T.J. An introduction to the classification of the physiognomic landscape types: Methodology and results of testing in the area of Kazimierz Landscape Park (Poland). Phys. Geogr. 2018, 40, 384–404. [Google Scholar] [CrossRef]
- Ma, H.R. Object-based Remote Sensing Image Classification of Forest Based on Multi-level Segmentation; Beijing Forestry University: Beijing, China, 2014. [Google Scholar]
- Zong, Y.; Li, Y.F.; Liu, H.Y. A Study of Coastal Wetland Vegetation Classification Based on Object-oriented Random Forest Method. J. Nanjing Norm. Univ. 2021, 21, 9. [Google Scholar]
- Li, Z.; Han, W.C.; Hu, H.Y.; Gao, X.; Wang, L.L.; Xiao, F.; Liu, W.C.; Guo, W.H.; Sun, D.F. Land use/cover classification based on combining spectral mixture analysis model and object-oriented method. Trans. Chin. Soc. Agric. Eng. 2021, 37, 225–233. [Google Scholar]
- Hu, J.M.; Dong, Z.Y.; Yang, X.Z. An object-oriented information extraction method for high-resolution remote sensing images. Geospat. Inf. 2021, 19, 10–13. [Google Scholar]
- Chen, M.L.; Dai, S.K. Analysis on Image Texture based on Gray-level Co-occurrence Matrix. Commun. Technol. 2012, 45, 108–111. [Google Scholar] [CrossRef]
- Jasiewicz, J.; Stepinski, T.F. Geomorphons-a pattern recognition approach to classification and mapping of landforms. Geomorphology 2013, 182, 147–156. [Google Scholar] [CrossRef]
- Ngunjiri, M.W.; Libohova, Z.; Owens, P.R.; Schulze, D.G. Landform pattern recognition and classification for predicting soil types of the Uasin Gishu Plateau, Kenya. Catena 2020, 188, 104390. [Google Scholar] [CrossRef]
- Wei, Y.C.; Zhao, M.F.; Zhu, C.D.; Zhang, X.X.; Pan, J.J. Predicting soil property in hilly regions by using landscape and multiscale micro-landform features. Chin. J. Appl. Ecol. 2022, 33, 467–476. [Google Scholar]
- Lingras, P.; Peters, G. Rough clustering. WIREs Data Min. Knowl. Discov. 2011, 1, 64–72. [Google Scholar] [CrossRef]
- Lingras, P.; Peters, G. Applying Rough Set Concepts to Clustering; Springer: London, UK, 2012. [Google Scholar]
- Cohen, J.A. Coefficient agreement for nominal scales. Educ. Psychol. Meas. 1960, 2, 37–46. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, X.J.; Zhang, K.P. Clustering Center Selection on K- means Clustering Algorithm. J. Jilin Univ. 2019, 37, 5. [Google Scholar]
- Zhou, S.B.; Xu, Z.Y.; Tang, X.Q. New method for determining optimal number of clusters in K-means clustering algorithm. Comput. Eng. Appl. 2010, 46, 27–31. [Google Scholar]
- Gong, Z.T. Chinese Soil Taxonomy; Science Press: Beijing, China, 1999. [Google Scholar]
- Wang, F. Regional Landscape Classification for Soil Series Survey in the Plain Farmland Area; Nanjing Agricultural University: Nanjing, China, 2015. [Google Scholar]
- Wang, H.Q.; Pan, J.J.; Yu, W.F.; Wang, W.Y.; Li, Z.F. The Interpretation of Landscape for Soil Series Survey in a Small Area. Chin. J. Soil Sci. 2015, 46, 257–264. [Google Scholar]
- Sun, G.; Huang, W.J.; Chen, P.F.; Gao, S.; Wen, X. Advances in UAV-based Multispectral Remote Sensing Applications. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–17. [Google Scholar]
- Yu, X.; Zhou, W.; He, H. A method of remote sensing image auto classification based on interval type-2 fuzzy c-means. In Proceedings of the IEEE International Conference on Fuzzy Systems, Beijing, China, 6–11 July 2014; pp. 223–228. [Google Scholar]
- Li, K.; Xu, J.; Zhao, T.; Liu, Z. A fuzzy spectral clustering algorithm for hyperspectral image classification. IET Image Process. 2021, 15, 2810–2817. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number of Spectrum | Name of Spectrum | Central Wavelength/nm | Full Width at Half Peak/nm |
|---|---|---|---|
| Blue | 450 | 32 | |
| Green | 560 | 32 | |
| Red | 650 | 32 | |
| Red Edge | 730 | 32 | |
| Near InfraRed | 840 | 52 |
| Feature Category | Feature Parameter | Formula |
|---|---|---|
| Spectrum feature | Mean | |
| Standard Deviation | ||
| Shape feature | NDVI | |
| NDWI | ||
| REDNDVI | ||
| Geometric feature | Length/Width | |
| Shape Index | ||
| Texture features | GLCM |
| Topography | Slope | Aspect | ||||
|---|---|---|---|---|---|---|
| Code | Category | Code | Category | Slope | Code | Category |
| 1 | Flat | 1 | Flat | ≤2° | 1 | North |
| 2 | Ridge | 2 | Gentle Slope | 2°–6° | 2 | East |
| 3 | Spur | 3 | Gentle–Middle Slope | 6°–15° | 3 | South |
| 4 | Hollow | 4 | Middle Slope | 15°∼25° | 4 | West |
| 5 | Valley | 5 | Steep Slope | ≥25° | ||
| 6 | Peak | |||||
| 7 | Shoulder | |||||
| 8 | Slope | |||||
| 9 | Footslope | |||||
| 10 | Pit | |||||
| Elevation | Land use | Object | |||
|---|---|---|---|---|---|
| Code | Elevation | Code | Category | Code | Category |
| 1 | 0–30 m | 1 | Paddy field | 1 | Paddy |
| 2 | 30–40 m | 2 | Watered land | 2 | Vegetables |
| 3 | 40–50 m | 3 | Dry land | 3 | Wheat |
| 4 | 50–60 m | 4 | Orchard | 4 | Rape |
| 5 | 60–70 m | 5 | Tea plantation | 5 | Maize |
| 6 | 70–80 m | 6 | Nursery | 6 | Sesame |
| 7 | 80–90 m | 7 | Woodland | 7 | Orchard |
| 8 | 90–100 m | 8 | Wasteland | 8 | Tea |
| 9 | 100–130 m | 9 | Greenhouse | 9 | Nursery |
| 10 | Building | 10 | Evergreen forest | ||
| 11 | Water | 11 | Mixed forests | ||
| 12 | Deciduous forest | ||||
| 13 | Wasteland | ||||
| 14 | Building | ||||
| 15 | Water | ||||
| Landscape | Area | Area Percentage | Code | Landscape | Area | Area Percentage | Code |
|---|---|---|---|---|---|---|---|
| t1-s1-a1-d4-l3-o3 | 1426.999 | 1.58% | 1 | t6-s2-a4-d9-l3-o3 | 25.5882 | 0.03% | 50 |
| t2-s1-a1-d5-l3-o3 | 324.39 | 0.36% | 2 | t6-s2-a4-d9-l7-o10 | 812.6314 | 0.90% | 51 |
| t2-s2-a3-d5-l1-o3 | 71.4506 | 0.08% | 3 | t6-s3-a1-d5-l7-o8 | 2000.857 | 2.22% | 52 |
| t3-s1-a1-d3-l1-o1 | 979.5747 | 1.09% | 4 | t6-s3-a1-d5-l9-o2 | 168.0305 | 0.19% | 53 |
| t3-s1-a1-d5-l3-o5 | 863.9857 | 0.96% | 5 | t6-s3-a1-d9-l1-o1 | 62.9914 | 0.07% | 54 |
| t3-s1-a2-d7-l7-o10 | 129.5776 | 0.14% | 6 | t6-s3-a4-d3-l3-o3 | 820.5404 | 0.91% | 55 |
| t3-s1-a3-d5-l3-o3 | 1008.926 | 1.12% | 7 | t6-s4-a1-d2-l1-o1 | 389.4215 | 0.43% | 56 |
| t3-s1-a3-d7-l3-o5 | 15.9806 | 0.02% | 8 | t6-s4-a2-d2-l4-o7 | 607.1563 | 0.67% | 57 |
| t3-s1-a4-d5-l9-o2 | 49.6719 | 0.06% | 9 | t6-s4-a2-d5-l3-o3 | 648.872 | 0.72% | 58 |
| t3-s2-a1-d6-l1-o1 | 192.4146 | 0.21% | 10 | t6-s4-a2-d7-l7-o12 | 563.2972 | 0.62% | 59 |
| t3-s2-a4-d5-l1-o1 | 361.8445 | 0.40% | 11 | t6-s4-a4-d4-l7-o13 | 1315.331 | 1.46% | 60 |
| t3-s3-a1-d9-l7-o12 | 140.2821 | 0.16% | 12 | t6-s4-a4-d5-l1-o1 | 344.0997 | 0.38% | 61 |
| t3-s3-a4-d4-l7-o10 | 972.6522 | 1.08% | 13 | t6-s4-a4-d8-l3-o5 | 162.8713 | 0.18% | 62 |
| t3-s3-a4-d9-l3-o5 | 39.3105 | 0.04% | 14 | t7-s1-a4-d3-l3-o3 | 207.3702 | 0.23% | 63 |
| t4-s1-a1-d2-l3-o3 | 469.9133 | 0.52% | 15 | t7-s2-a1-d2-l7-o9 | 350.6233 | 0.39% | 64 |
| t4-s1-a4-d2-l7-o8 | 471.4972 | 0.52% | 16 | t7-s2-a3-d2-l1-o3 | 43.0202 | 0.05% | 65 |
| t4-s1-a4-d6-l7-o10 | 376.4227 | 0.42% | 17 | t7-s2-a3-d9-l1-o1 | 24.0997 | 0.03% | 66 |
| t4-s2-a1-d5-l1-o3 | 93.5883 | 0.10% | 18 | t7-s2-a4-d9-l7-o10 | 330.6616 | 0.37% | 67 |
| t5-s1-a3-d6-l3-o5 | 119.127 | 0.13% | 19 | t7-s3-a1-d5-l7-o10 | 544.4619 | 0.60% | 68 |
| t5-s1-a4-d3-l1-o3 | 63.526 | 0.07% | 20 | t7-s3-a1-d7-l3-o5 | 49.7057 | 0.06% | 69 |
| t5-s1-a4-d5-l7-o12 | 277.9403 | 0.31% | 21 | t7-s3-a4-d9-l9-o2 | 50.7333 | 0.06% | 70 |
| t5-s2-a1-d3-l3-o5 | 381.3906 | 0.42% | 22 | t7-s4-a1-d2-l1-o1 | 103.57 | 0.11% | 71 |
| t5-s2-a1-d5-l1-o3 | 127.9758 | 0.14% | 23 | t7-s4-a1-d4-l3-o3 | 182.2174 | 0.20% | 72 |
| t5-s2-a1-d5-l9-o2 | 77.3689 | 0.09% | 24 | t7-s4-a2-d3-l7-o13 | 121.2364 | 0.13% | 73 |
| t5-s2-a1-d7-l7-o12 | 198.5637 | 0.22% | 25 | t7-s4-a3-d6-l3-o3 | 168.7981 | 0.19% | 74 |
| t5-s2-a4-d2-l3-o5 | 772.3075 | 0.86% | 26 | t7-s4-a3-d6-l7-o10 | 414.9493 | 0.46% | 75 |
| t5-s2-a4-d2-l8-o13 | 264.2767 | 0.29% | 27 | t7-s4-a4-d4-l1-o2 | 194.7145 | 0.22% | 76 |
| t5-s2-a4-d5-l1-o1 | 107.1413 | 0.12% | 28 | t7-s4-a4-d4-l3-o7 | 61.2594 | 0.07% | 77 |
| t5-s2-a4-d9-l1-o1 | 31.4418 | 0.03% | 29 | t8-s1-a1-d4-l7-o8 | 1251.572 | 1.39% | 78 |
| t5-s2-a4-d9-l7-o11 | 115.1422 | 0.13% | 30 | t8-s2-a3-d2-l8-o13 | 517.4768 | 0.57% | 79 |
| t5-s3-a1-d5-l7-o10 | 577.5642 | 0.64% | 31 | t8-s2-a4-d2-l3-o5 | 567.8578 | 0.63% | 80 |
| t5-s3-a1-d9-l3-o3 | 40.225 | 0.04% | 32 | t9-s1-a1-d2-l1-o3 | 1216.079 | 1.35% | 81 |
| t5-s3-a4-d8-l3-o5 | 82.1636 | 0.09% | 33 | t9-s1-a1-d6-l7-o13 | 299.9196 | 0.33% | 82 |
| t5-s3-a4-d8-l9-o2 | 21.2627 | 0.02% | 34 | t9-s1-a4-d3-l1-o3 | 380.9284 | 0.42% | 83 |
| t5-s4-a1-d2-l7-o10 | 289.9934 | 0.32% | 35 | t9-s1-a4-d4-l7-o10 | 1468.644 | 1.63% | 84 |
| t5-s4-a2-d3-l1-o1 | 79.8899 | 0.09% | 36 | t9-s1-a4-d9-l3-o5 | 27.4092 | 0.03% | 85 |
| t5-s4-a3-d8-l7-o12 | 247.3944 | 0.27% | 37 | t9-s2-a1-d2-l7-o12 | 429.399 | 0.48% | 86 |
| t5-s4-a4-d4-l3-o3 | 187.5225 | 0.21% | 38 | t9-s2-a2-d5-l1-o1 | 2456.642 | 2.72% | 87 |
| t5-s4-a4-d4-l7-o9 | 783.618 | 0.87% | 39 | t9-s2-a3-d5-l3-o3 | 1827.01 | 2.03% | 88 |
| t6-s1-a1-d3-l3-o3 | 377.7436 | 0.42% | 40 | t9-s2-a3-d8-l7-o11 | 139.7857 | 0.15% | 89 |
| t6-s1-a1-d9-l7-o10 | 142.0589 | 0.16% | 41 | t9-s2-a4-d2-l1-o1 | 832.891 | 0.92% | 90 |
| t6-s1-a4-d3-l1-o1 | 862.9392 | 0.96% | 42 | t9-s3-a1-d7-l3-o5 | 21.2196 | 0.02% | 91 |
| t6-s1-a4-d3-l7-o9 | 765.05 | 0.85% | 43 | t9-s3-a2-d3-l3-o5 | 54.4972 | 0.06% | 92 |
| t6-s1-a4-d6-l7-o13 | 1480.8 | 1.64% | 44 | t9-s3-a4-d5-l3-o5 | 64.5773 | 0.07% | 93 |
| t6-s2-a1-d3-l7-o13 | 1339.79 | 1.49% | 45 | t9-s4-a2-d4-l7-o13 | 107.5602 | 0.12% | 94 |
| t6-s2-a1-d5-l1-o1 | 508.4847 | 0.56% | 46 | t10-s1-a1-d4-l7-o9 | 510.7356 | 0.57% | 95 |
| t6-s2-a1-d5-l7-o8 | 680.4379 | 0.75% | 47 | Water | 17925.71 | 19.87% | 96 |
| t6-s2-a1-d9-l3-o5 | 51.557 | 0.06% | 48 | Building | 5963.977 | 6.61% | 97 |
| t6-s2-a4-d5-l3-o3 | 1297.76 | 1.44% | 49 | Buffer Zone | 23035.35 | 25.54% | 98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Z.; Lu, W.; Zhu, F.; Zhu, C.; Li, Z.; Pan, J. Landscape Classification System Based on RKM Clustering for Soil Survey UAV Images–Case Study of the Small Hilly Areas in Jurong City. Sensors 2022, 22, 9895. https://doi.org/10.3390/s22249895
Fang Z, Lu W, Zhu F, Zhu C, Li Z, Pan J. Landscape Classification System Based on RKM Clustering for Soil Survey UAV Images–Case Study of the Small Hilly Areas in Jurong City. Sensors. 2022; 22(24):9895. https://doi.org/10.3390/s22249895
Chicago/Turabian StyleFang, Zihan, Wenhao Lu, Fubin Zhu, Changda Zhu, Zhaofu Li, and Jianjun Pan. 2022. "Landscape Classification System Based on RKM Clustering for Soil Survey UAV Images–Case Study of the Small Hilly Areas in Jurong City" Sensors 22, no. 24: 9895. https://doi.org/10.3390/s22249895