
Transmission Power Control in Wireless Sensor Networks Using Fuzzy Adaptive Data Rate


Abstract
:1. Introduction
2. System Implementation
2.1. System Architecture
2.2. Implementation of TDMA
3. Adaptive Fuzzy Control Algorithm and Analysis of Power Consumption
3.1. Power Consumption in Different Data Rate and Transmission Power
3.2. Relationship between PER and SNR
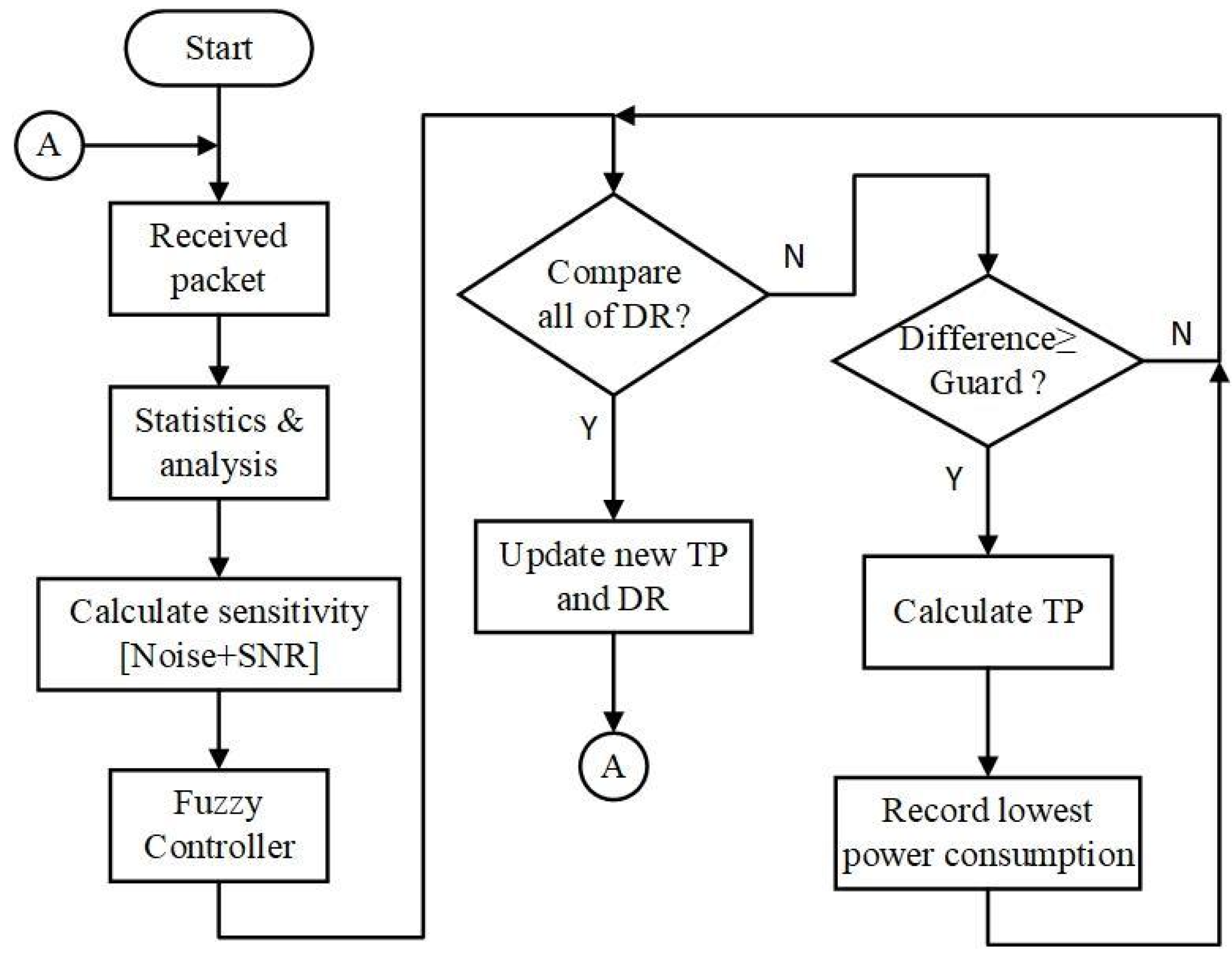
3.3. Fuzzy Control Algorithm Design
4. Experimental Results and Discussions
4.1. Allocation of Bridge and Sensor Nodes
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, I.H.; Javaid, M. Role of Internet of things (IoT) in adoption of Industry 4.0. J. Ind. Intg Mgmt. 2021, 6, 1–19. [Google Scholar] [CrossRef]
- Purohit, J. IOT and Industry 4.0—Gateway towards improving Energy Efficiency. IJARCSSE 2017, 7, 58–62. [Google Scholar] [CrossRef]
- Haron, A.S.; Mansor, Z.; Ahmad, I.; Maharum, S.M.M. The performance of 2.4 GHz and 5GHz wi-fi router placement for signal strength optimization using Altair WinProp. In Proceedings of the IEEE 7th International Conference on Smart Instrumentation, Measurement and Applications (ICSIMA), Bandung, Indonesia, 23–25 August 2021. [Google Scholar]
- Aust, S.; Ito, T. Sub 1 GHz wireless LAN propagation path loss models for urban smart grid applications. In Proceedings of the International Conference on Computing, Networking and Communications (ICNC), Maui, HI, USA, 30 January–2 February 2012; pp. 116–120. [Google Scholar] [CrossRef]
- Aust, S.; Ito, T. Sub 1 GHz wireless LAN deployment scenarios and design implications in rural areas. In Proceedings of the IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; Volume 2011, pp. 1045–1049. [Google Scholar] [CrossRef]
- Aust, S.; Prasad, R.V.; Niemegeers, I.G.M.M. IEEE 802.11ah: Advantages in standards and further challenges for sub 1 GHz wi-fi. In Proceedings of the IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; Volume 2012, pp. 6885–6889. [Google Scholar] [CrossRef]
- Bachir, A.; Dohler, M.; Watteyne, T.; Leung, K.K. MAC essentials for wireless sensor networks. IEEE Commun. Surv. Tutor. 2010, 12, 222–248. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Qiu, Z.; Luo, Y.; Wei, L.; Lin, S.; Liu, X. A modified TDMA algorithm based on adaptive timeslot exchange in ad hoc network. In Proceedings of the IEEE 4th International Conference on Computer and Communications (ICCC), Chengdu, China, 7–10 December 2018; Volume 2018, pp. 457–461. [Google Scholar] [CrossRef]
- Cao, K.; Dong, C.; Yu, F. Dynamic time-slot allocation algorithm based on environment sensing in wireless sensor network. In Proceedings of the IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 19–21 July 2019; Volume 2019, pp. 490–494. [Google Scholar] [CrossRef]
- Piyare, R.; Murphy, A.L.; Magno, M.; Benini, L. On-Demand TDMA for energy efficient data collection with LoRa and wake-up receiver. In Proceedings of the 14th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Limassol, Cyprus, 15–17 October 2018; Volume 2018, pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Sahoo, P.K.; Pattanaik, S.R.; Wu, S.L. Design and analysis of a low latency deterministic network MAC for wireless sensor networks. Sensors 2017, 17, 2185. [Google Scholar] [CrossRef] [PubMed]
- Iala, I.; Ouadou, M.; Aboutajdine, D.; Zytoune, O. Energy based collision avoidance at the MAC layer for wireless sensor network. In Proceedings of the International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Fez, Morocco, 22–24 May 2017; Volume 2017, pp. 1–5. [Google Scholar] [CrossRef]
- Polastre, J.; Hill, J.; Culler, D. Versatile low power media access for wireless sensor networks. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004. [Google Scholar] [CrossRef]
- Tanoli, U.R.; Abbasi, R.; Utmani, Q.J.; Usman, M.; Khan, I.; Jan, S. Hybrid TDMA-FDMA based inter-relay communication in cooperative networks over Nakagami-m fading channel. In Proceedings of the International Conference on Emerging Technologies, Islamabad, Pakistan, 8–9 October 2012; Volume 2012, pp. 1–5. [Google Scholar] [CrossRef]
- Snow, J.; Feng, W.-C.; Wu-chang, F. Implementing a low power TDMA protocol over 802.11. In Proceedings of the IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 13–17 March 2005; Volume 2005, pp. 75–80. [Google Scholar] [CrossRef] [Green Version]
- Bai, R.G.; Qu, Y.G.; Guo, Y.; Zhao, B.H. An Energy-Efficient TDMA MAC for Wireless Sensor Networks. In Proceedings of the 2nd IEEE Asia and the Pacific Service Computing Conference (APSCC 2007), Tsukuba, Japan, 11–14 December 2007; pp. 69–74. [Google Scholar] [CrossRef]
- Yetgin, H.; Cheung, K.T.K.; El-Hajjar, M.; Hanzo, L.H. A survey of network lifetime maximization techniques in wireless sensor networks. IEEE Commun. Surv. Tutor. 2017, 19, 828–854. [Google Scholar] [CrossRef] [Green Version]
- Akhtar, F.; Rehmani, M.H. Energy replenishment using renewable and traditional energy resources for sustainable wireless sensor networks: A review. Renew. Sustain. Energy Rev. 2015, 45, 769–784. [Google Scholar] [CrossRef]
- Ahmad, A.; Ahmad, S.; Rehmani, M.H.; Hassan, N.U. A survey on radio resource allocation in cognitive radio sensor networks. IEEE Commun. Surv. Tutor. 2015, 17, 888–917. [Google Scholar] [CrossRef]
- Sudevalayam, S.; Kulkarni, P. Energy harvesting sensor nodes: Survey and implications. IEEE Commun. Surv. Tutor. 2011, 13, 443–461. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.Y.; Jin, Z.; Choi, J.; Lee, B.; Cho, J. Transmission power control with the guaranteed communication reliability in WSN. Int. J. Distrib. Sens. Netw. 2015, 2015, 632590. [Google Scholar] [CrossRef]
- Masood, M.M.Y.; Ahmed, G.; Khan, N.M. A Kalman filter based adaptive on demand transmission power control (AODTPC) algorithm for wireless sensor networks. In Proceedings of the International Conference on Emerging Technologies, Islamabad, Pakistan, 8–9 October 2012; Volume 2012, pp. 1–6. [Google Scholar] [CrossRef]
- Hao, X.; Yao, N.; Wang, L.; Wang, J. Joint resource allocation algorithm based on multi-objective optimization for wireless sensor networks. Appl. Soft Comput. 2020, 94, 106470. [Google Scholar] [CrossRef]
- Ikram, W.; Petersen, S.; Orten, P.; Thornhill, N.F. Adaptive multi-channel transmission power control for industrial wireless instrumentation. IEEE Trans. Ind. Inform. 2014, 10, 978–990. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Luo, J. Research on multi-rate in wireless sensor network based on real platform. In Proceedings of the 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Yichang, China, 21–23 April 2012; Volume 2012, pp. 1240–1243. [Google Scholar] [CrossRef]
- Lanzisera, S.; Mehta, A.M.; Pister, K.S.J. Reducing average power in wireless sensor networks through data rate adaptation. In Proceedings of the IEEE International Conference on Communications, Dresden, Germany, 14–18 June 2009. [Google Scholar] [CrossRef]
- Rondinone, M.; Ansari, J.; Riihijärvi, J.; Mähönen, P. Designing a reliable and stable link quality metric for wireless sensor networks. In Proceedings of the workshop on Real-world wireless sensor networks, New York, NY, USA, 6–10 April 2008. [Google Scholar] [CrossRef]
- Zhang, J.; Tan, K.; Zhao, J.; Wu, H.; Zhang, Y. A practical SNR-guided rate adaptation. In Proceedings of the IEEE INFOCOM 2008-The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; Volume 2008, pp. 2083–2091. [Google Scholar] [CrossRef]
- Li, Y.; Yang, J.; Wang, J. DyLoRa: Towards Energy Efficient Dynamic LoRa Transmission Control. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; Volume 2020, pp. 2312–2320. [Google Scholar] [CrossRef]
- Hung, C.W.; Zhang, H.J.; Hsu, W.T.; Zhuang, Y.D. A low-power WSN protocol with ADR and TP hybrid control. Sensors 2020, 20, 5767. [Google Scholar] [CrossRef] [PubMed]
- Hung, C.; Hsu, W.; Hsia, K. Multiple frequency shift keying optimization of adaptive data rate for ultra-low power wireless sensor network. In Proceedings of the 12th International Conference on Developments in eSystems Engineering (DeSE), Kazan, Russia, 7–10 October 2019; Volume 2019, pp. 1026–1030. [Google Scholar] [CrossRef]
- Moe, M.; Johnsrud, S.; Hellan, S. CC13x0 Low Data Rate Operation; Texas Instruments: Texas, USA, June 2017. [Google Scholar]
- Arali, P.; Kothari, M.R.; Sreelakshmi, D.K. Design and Simulation of RF Receiver for LTE. Int. J. Eng. Res. Technol. 2018, 6, 1–3. [Google Scholar]
- Eric Nii Otorkunor Sackey. Performance Evaluation of M-ary Frequency Shift Keying Radio Modems via Measurements and Simulations. Master’s Thesis, Department of Electrical Engineering, Blekinge Institute of Technology Karlskrona, Karlskrona, Sweden, 2006. [Google Scholar]
- Precup, R.E.; Hellendoorn, H. A survey on industrial applications of fuzzy control. Comput. Ind. 2011, 62, 213–226. [Google Scholar] [CrossRef]
- Chen, H.Y.; Lee, C.H. Vibration signals analysis by explainable artificial intelligence (XAI) approach: Application on bearing faults diagnosis. IEEE Access 2020, 8, 134246–134256. [Google Scholar] [CrossRef]
- Chen, H.Y.; Lee, C.H. Electricity consumption prediction for buildings using multiple adaptive network-based fuzzy inference system models and gray relational analysis. Energy Rep. 2019, 5, 1509–1524. [Google Scholar] [CrossRef]
- Chiu, H.W.; Lee, C.H. Prediction of machining accuracy and surface quality for CNC machine tools using data driven approach. Adv. Eng. Softw. 2017, 114, 246–257. [Google Scholar] [CrossRef]
- Mamdani, E.H.; Assilian, S. An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Man-Mach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy Identification of Systems and Its Applications to Modeling and Control. IEEE Trans. Syst. Man Cybern. 1985, smc-15, 116–132. [Google Scholar] [CrossRef]
- Kaur, A.; Kaur, A. Comparison of Mamdani-Type and Sugeno-Type Fuzzy Inference Systems for Air Conditioning System. Int. J. Soft Comput. Eng. 2012, 2, 323–325. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Rate | Deviation | RX BW | Data Rate | Deviation | RX BW |
|---|---|---|---|---|---|
| 12.5 kbps | 5 kHz | 49 kHz | 300 kbps | 105 kHz | 622 kHz |
| 50 kbps | 25 kHz | 98 kHz | 400 kbps | 140 kHz | 622 kHz |
| 100 kbps | 45 kHz | 196 kHz | 450 kbps | 155 kHz | 784 kHz |
| 200 kbps | 70 kHz | 311 kHz | 500 kbps | 175 kHz | 1243 kHz |
| Transmission Power | Average Current | Transmission Power | Average Current | Transmission Power | Average Current |
|---|---|---|---|---|---|
| 14 dBm | 24.138 mA | 9 dBm | 18.181 mA | 4 dBm | 13.992 mA |
| 13 dBm | 23.894 mA | 8 dBm | 17.460 mA | 3 dBm | 13.009 mA |
| 12 dBm | 21.575 mA | 7 dBm | 16.569 mA | 2 dBm | 12.447 mA |
| 11 dBm | 20.749 mA | 6 dBm | 15.496 mA | 1 dBm | 12.064 mA |
| Data Rate (kbps) | 12.5 | 50 | 100 | 200 | 300 | 400 | 450 | 500 |
|---|---|---|---|---|---|---|---|---|
| Offset | 9.73 | 7.27 | 5.39 | 4.89 | 1.99 | 1.04 | −0.44 | −3.64 |
| Data Rate (kbps) | 12.5 | 50 | 100 | 200 | 300 | 400 | 450 | 500 |
|---|---|---|---|---|---|---|---|---|
| (dB) | 2.75 | 5.22 | 7.10 | 7.60 | 10.50 | 11.45 | 12.93 | 16.13 |
| Data Rate 50 kbps | Data RATE 100 kbps | Data Rate 200 kbps | |
|---|---|---|---|
| PER | ~1% | ~1% | ~1% |
| SNR | 5.22 dB | 7.09 dB | 7.59 dB |
| Transmission Power | 10 dBm | 12 dBm | 13 dBm |
| Power Consumption | 35.64 uC | 15.93 uC | 7.72 uC |
| Saving Rate | ╳ | 55.30% | 78.34% |
| Error Count | VL | L | M | H | VH | |
|---|---|---|---|---|---|---|
| Error Interval | ||||||
| VL | M | H | VH | VH | VH | |
| L | L | M | H | VH | VH | |
| M | L | M | M | H | VH | |
| H | VL | L | M | H | H | |
| VH | VL | VL | L | M | H | |
| Node No. | Data Rate | Transmission Power |
|---|---|---|
| 1, 3, 5, 7, 9 | Adjust according to the algorithm | |
| 2 | 8 dBm | 200 kbps |
| 4 | 9 dBm | 100 kbps |
| 6 | 8 dBm | 400 kbps |
| 8 | 5 dBm | 450 kbps |
| 10 | 10 dBm | 400 kbps |
| Node No. | PER | Average Transmission Current (µA) | Overall Average Current (µA) | Briefly Describe the Effects of Interference |
|---|---|---|---|---|
| 1 | 1.04% | 0.71 | 19.49 | It is at the entrance of the first floor and farthest from the bridge. It is more obviously affected by people walking around. |
| 2 | 0.07% | 1.12 | 20.57 | |
| 3 | 0.77% | 1.02 | 20.09 | It is in the stairwell and people walk around. The elevator also starts and stops, causing interference. |
| 4 | 1.51% | 2.33 | 23.30 | |
| 5 | 1.03% | 0.66 | 19.46 | It is outside the office and is more obviously affected by people walking around during the day. |
| 6 | 0.40% | 0.56 | 19.25 | |
| 7 | 0.42% | 0.30 | 18.86 | It is on the same floor as the bridge and few people will pass by. |
| 8 | 1.52% | 0.42 | 19.02 | |
| 9 | 1.22% | 0.59 | 19.24 | It is outside the classroom and there are some people who walk around occasionally. |
| 10 | 0.46% | 0.63 | 19.31 |
| Node Number | Battery Life |
|---|---|
| 1 | 7.03 years |
| 3 | 6.82 years |
| 5 | 7.04 years |
| 7 | 7.26 years |
| 9 | 7.12 years |
| Parameters which consume the most power | 2.04 years |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hung, C.-W.; Zhuang, Y.-D.; Lee, C.-H.; Wang, C.-C.; Yang, H.-H. Transmission Power Control in Wireless Sensor Networks Using Fuzzy Adaptive Data Rate. Sensors 2022, 22, 9963. https://doi.org/10.3390/s22249963
Hung C-W, Zhuang Y-D, Lee C-H, Wang C-C, Yang H-H. Transmission Power Control in Wireless Sensor Networks Using Fuzzy Adaptive Data Rate. Sensors. 2022; 22(24):9963. https://doi.org/10.3390/s22249963
Chicago/Turabian StyleHung, Chung-Wen, Yi-Da Zhuang, Ching-Hung Lee, Chun-Chieh Wang, and Hsi-Hsun Yang. 2022. "Transmission Power Control in Wireless Sensor Networks Using Fuzzy Adaptive Data Rate" Sensors 22, no. 24: 9963. https://doi.org/10.3390/s22249963
APA StyleHung, C.-W., Zhuang, Y.-D., Lee, C.-H., Wang, C.-C., & Yang, H.-H. (2022). Transmission Power Control in Wireless Sensor Networks Using Fuzzy Adaptive Data Rate. Sensors, 22(24), 9963. https://doi.org/10.3390/s22249963