
Kinematic Loggers—Development of Rugged Sensors and Recovery Systems for Field Measurements of Stone Rolling Dynamics and Impact Accelerations during Floods

 ,
,
Abstract
:
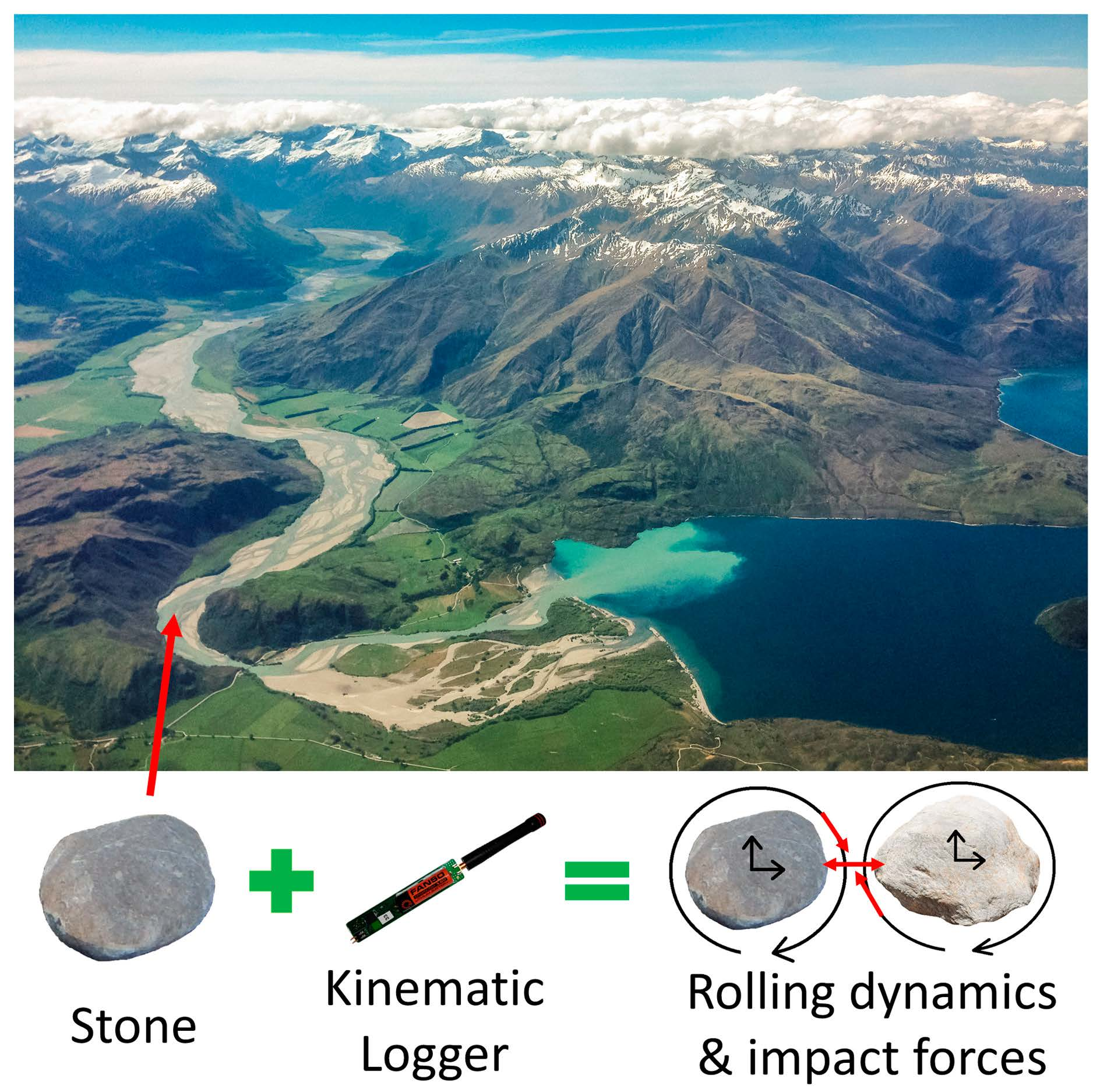
1. Introduction
2. Electronics and Sensor Design
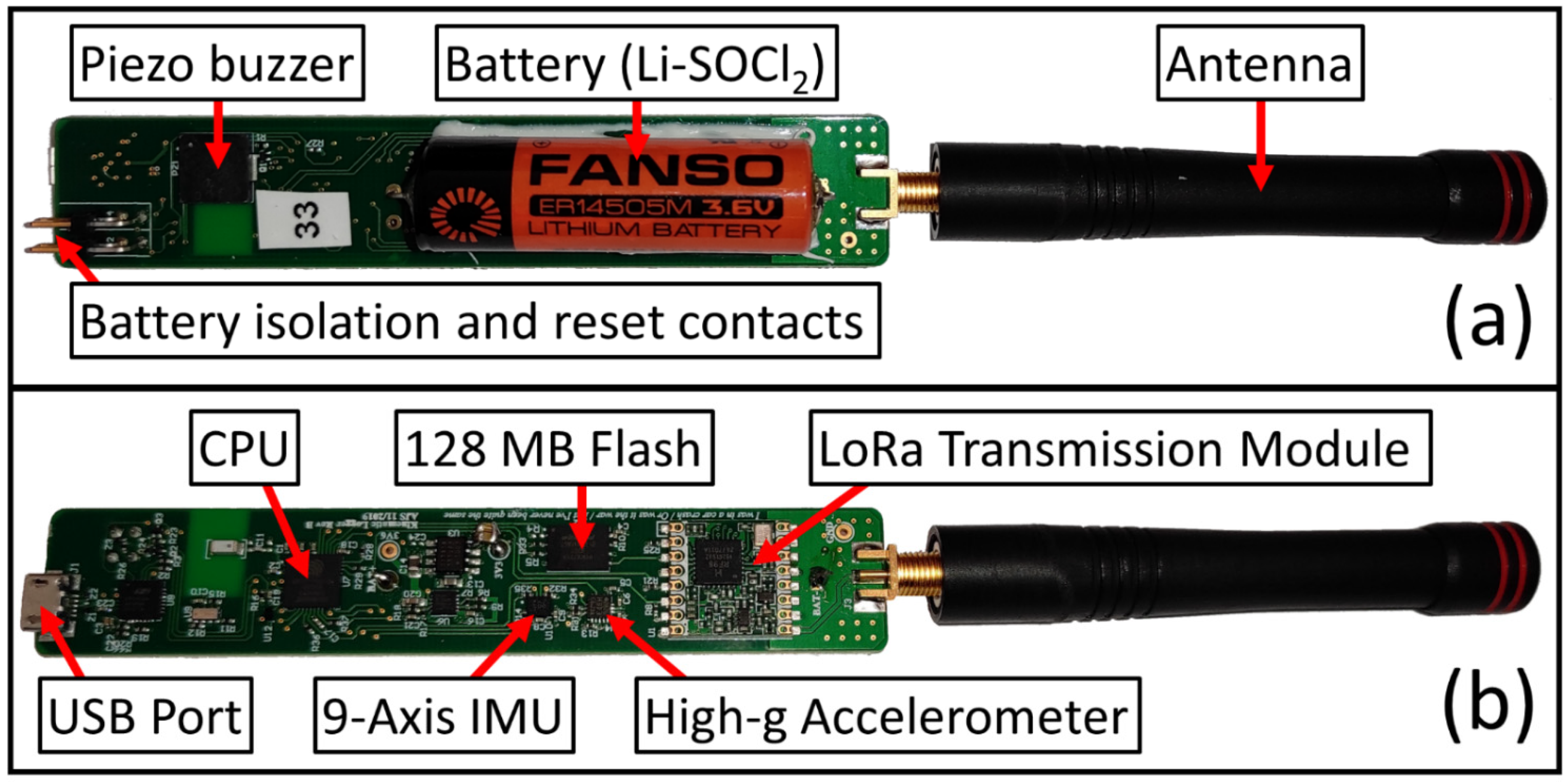
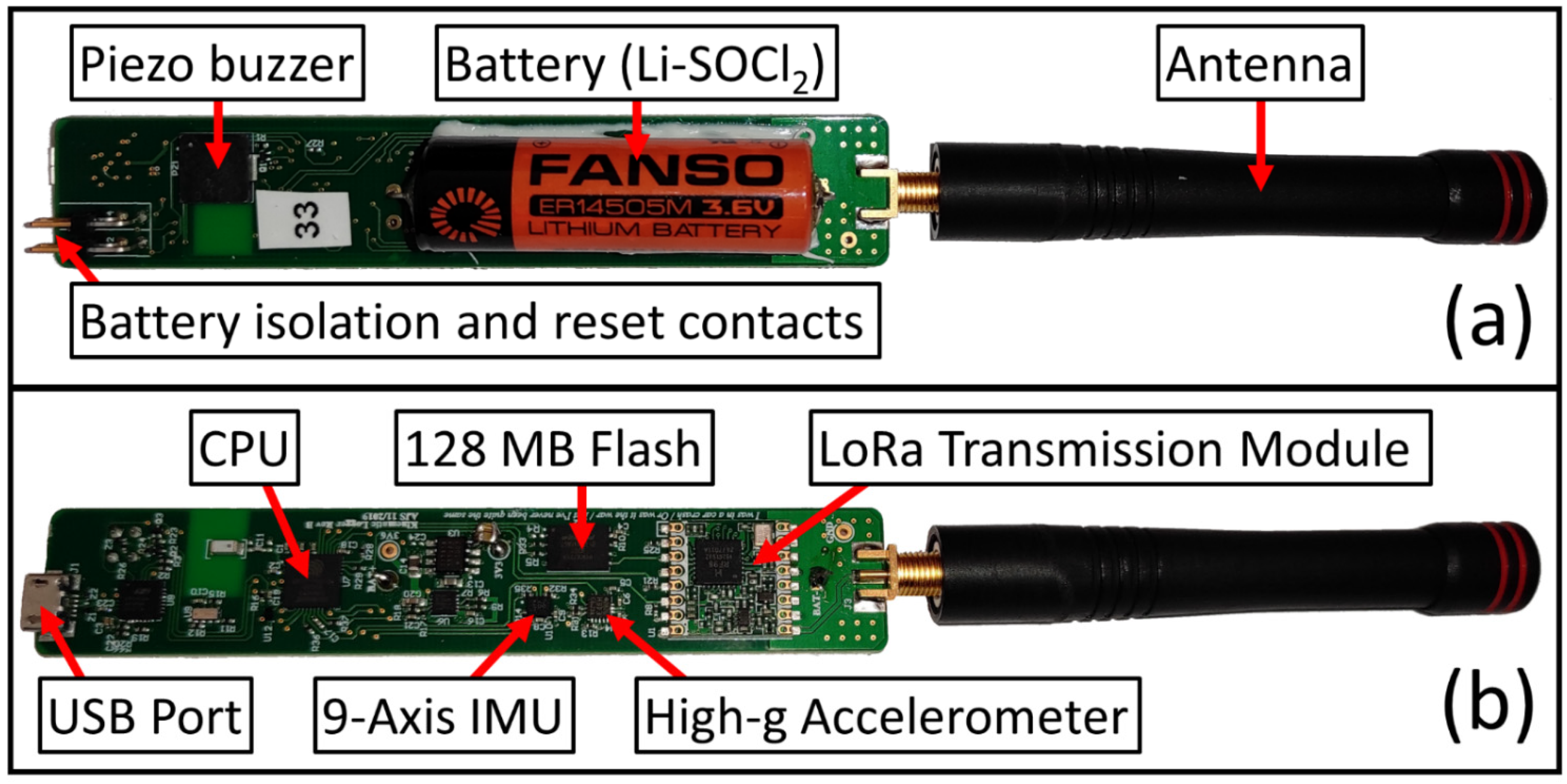
2.1. Overview of Kinematic Logger PCB Layout and Components
2.2. Components and Specifications
- Central Processing Unit (CPU)
- Inertial Measurement Unit (IMU)
- High-g accelerometer
- LoRa radio transmission module and antenna
- Flash memory
- Piezo buzzer
- Real-time clock
- Voltage regulation and power management
- USB communications
- Battery
- Battery isolation and reset
2.3. Firmware and Deployment Modes
2.4. High Frequency LoRa Recovery Messages
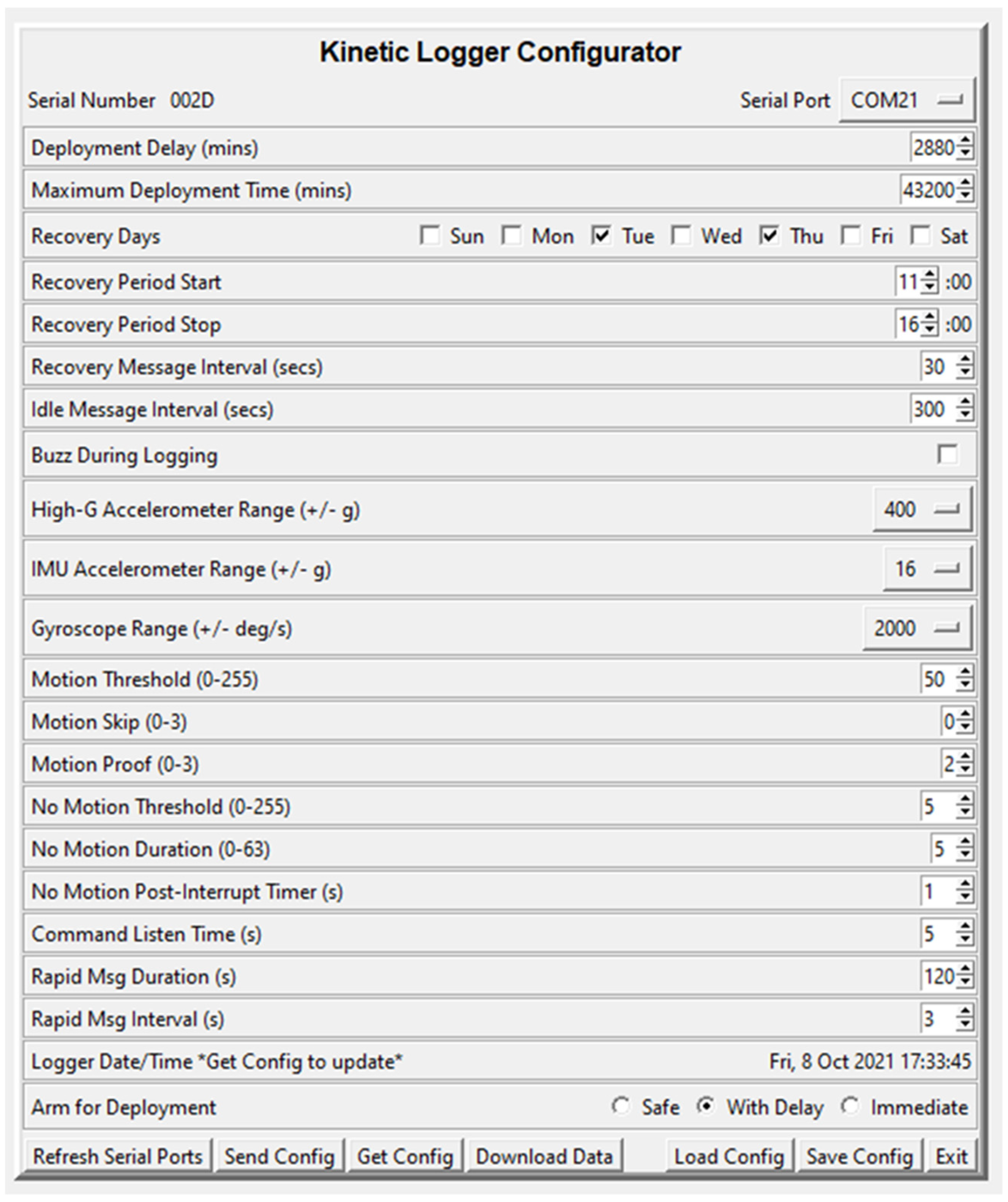
2.5. Software for Configuring Kinematic Loggers and Downloading Data
2.6. Power Consumption and Battery Life
2.7. Magnetometer Calibration and Sensor Fusion for Orientation
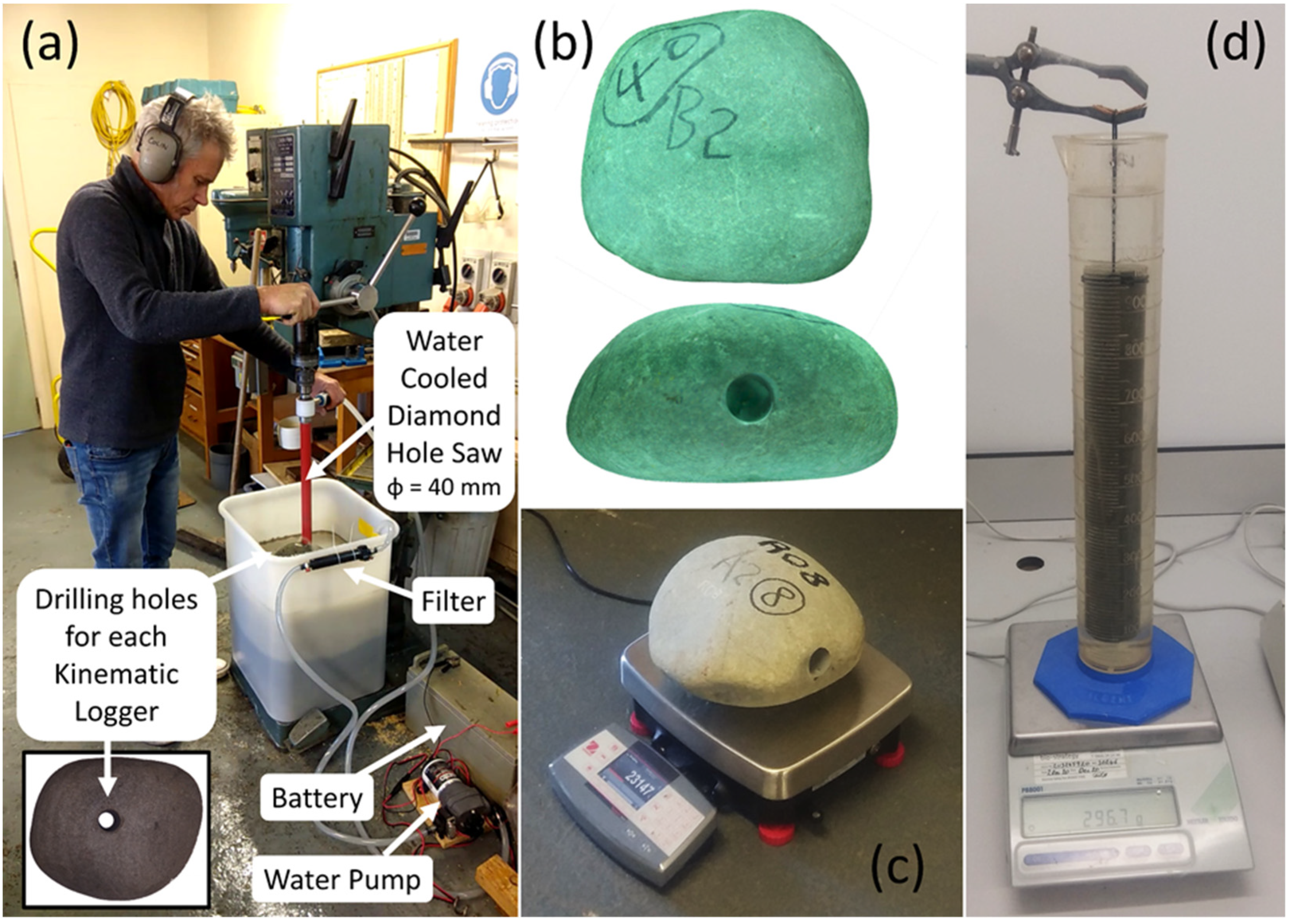
3. Stone Collection, Drilling, and Preparation for Installation of Kinematic Loggers
4. Sensor Housings, Kinematic Logger Installation Orientation, and Recovery Systems
4.1. Sensor Housings
4.2. Ballasting Sensor Housings
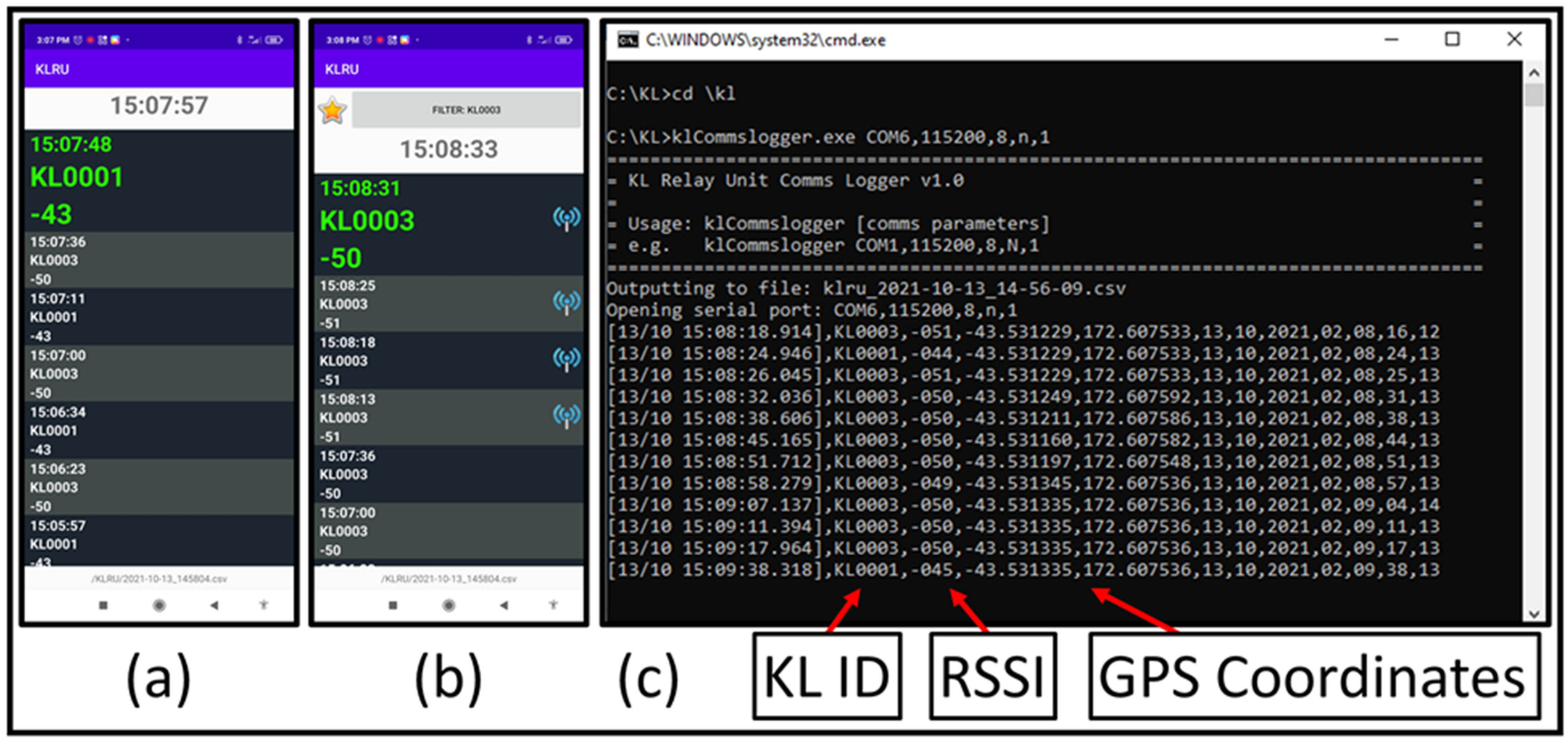
4.3. Relay Units and Recovery Systems
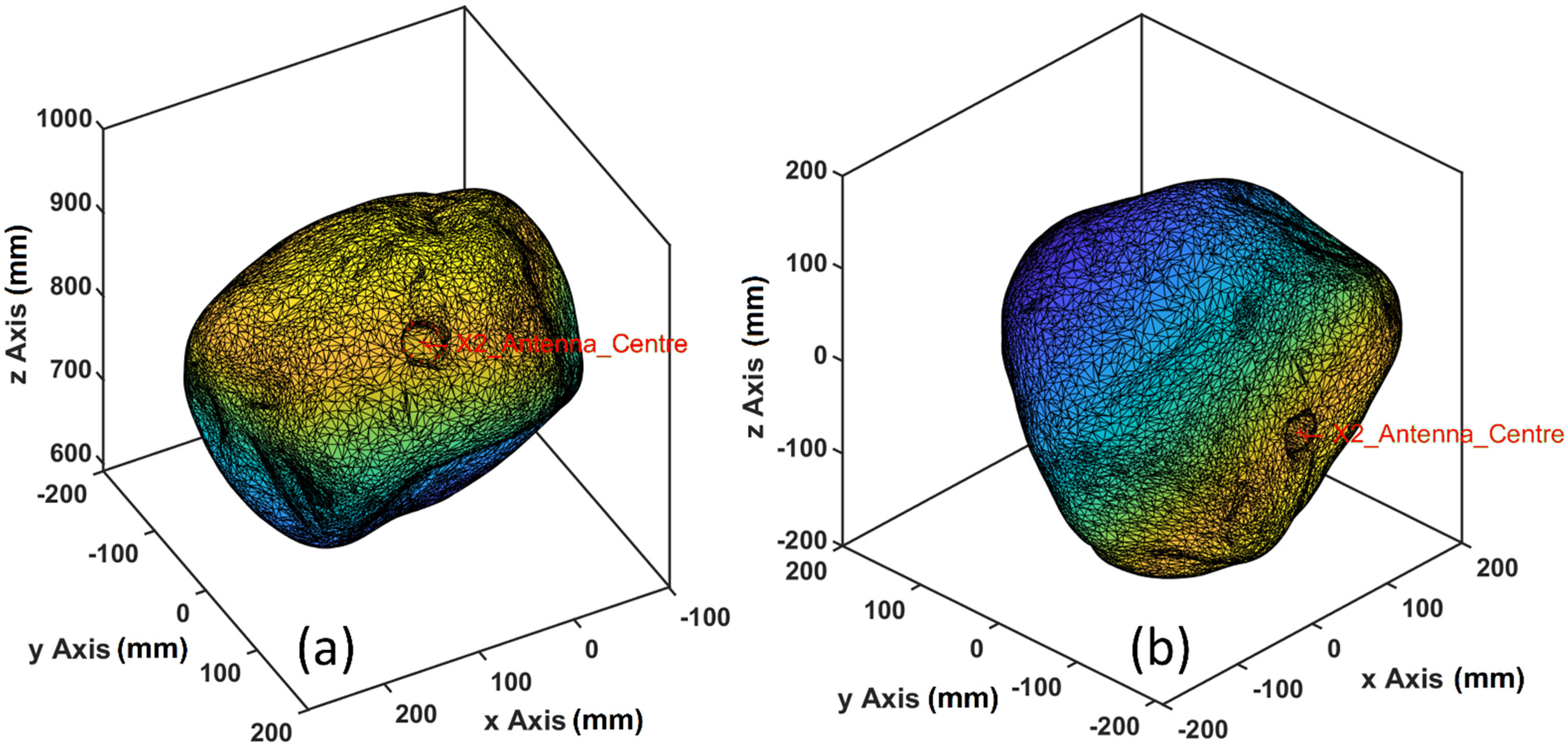
4.4. Signal Strength Analysis
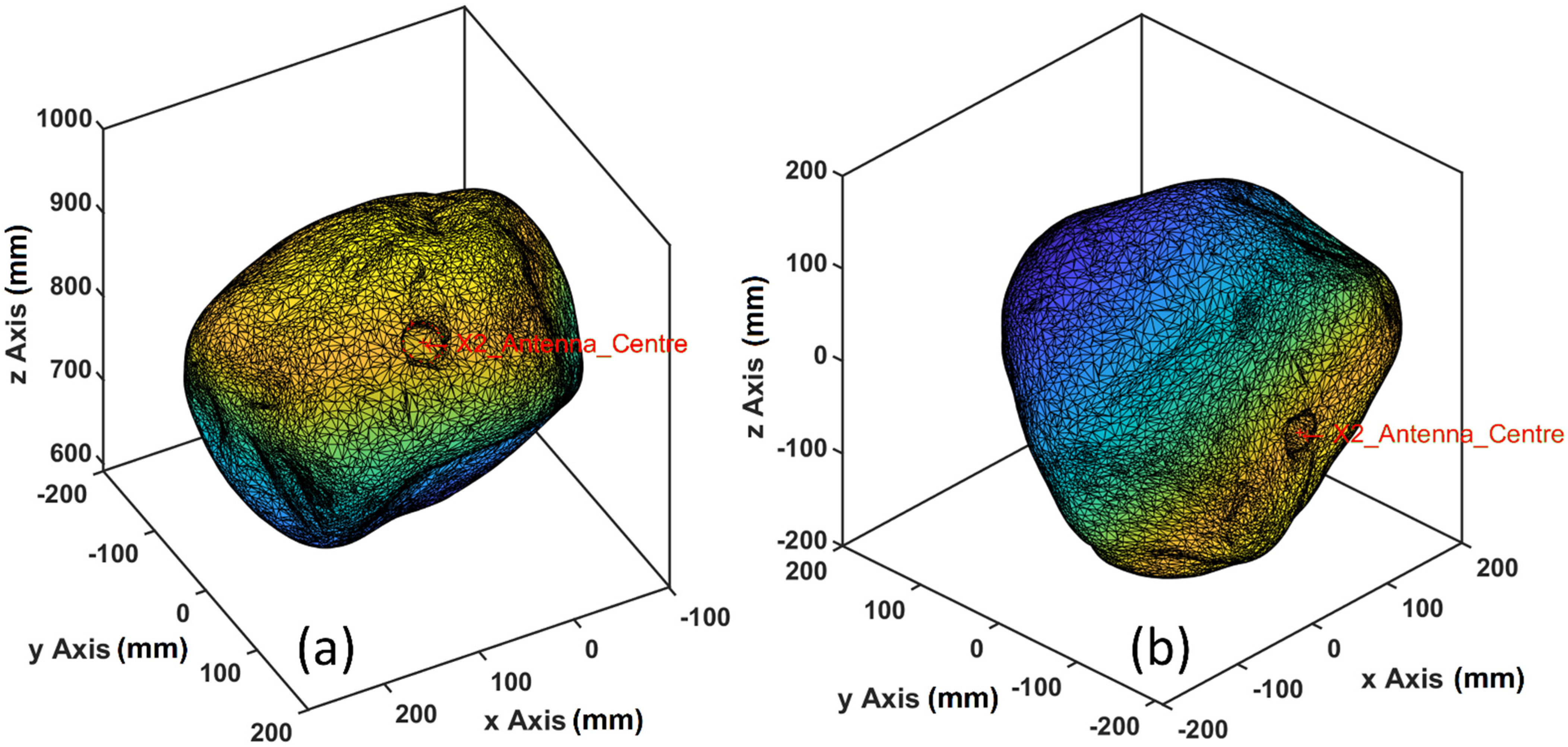
4.5. Kinematic Logger Installation Orientation Relative to the Stone
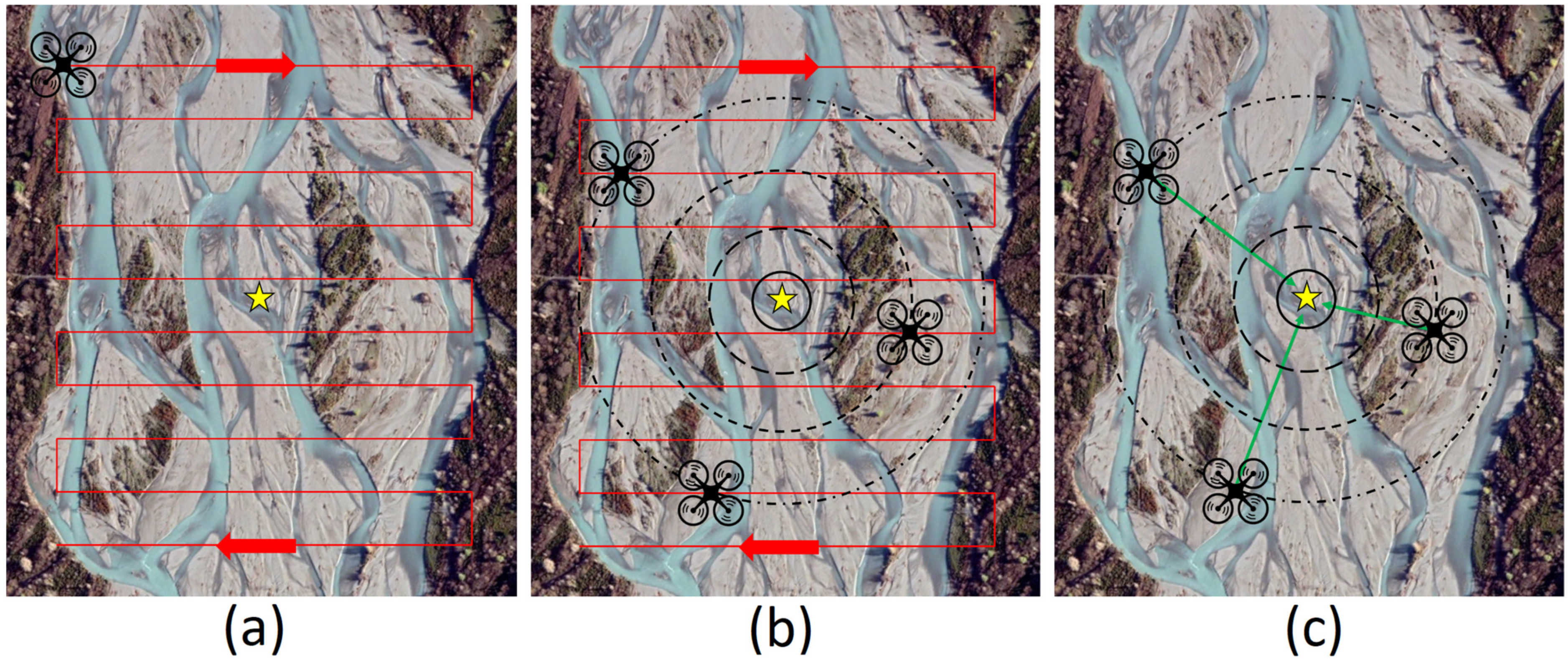
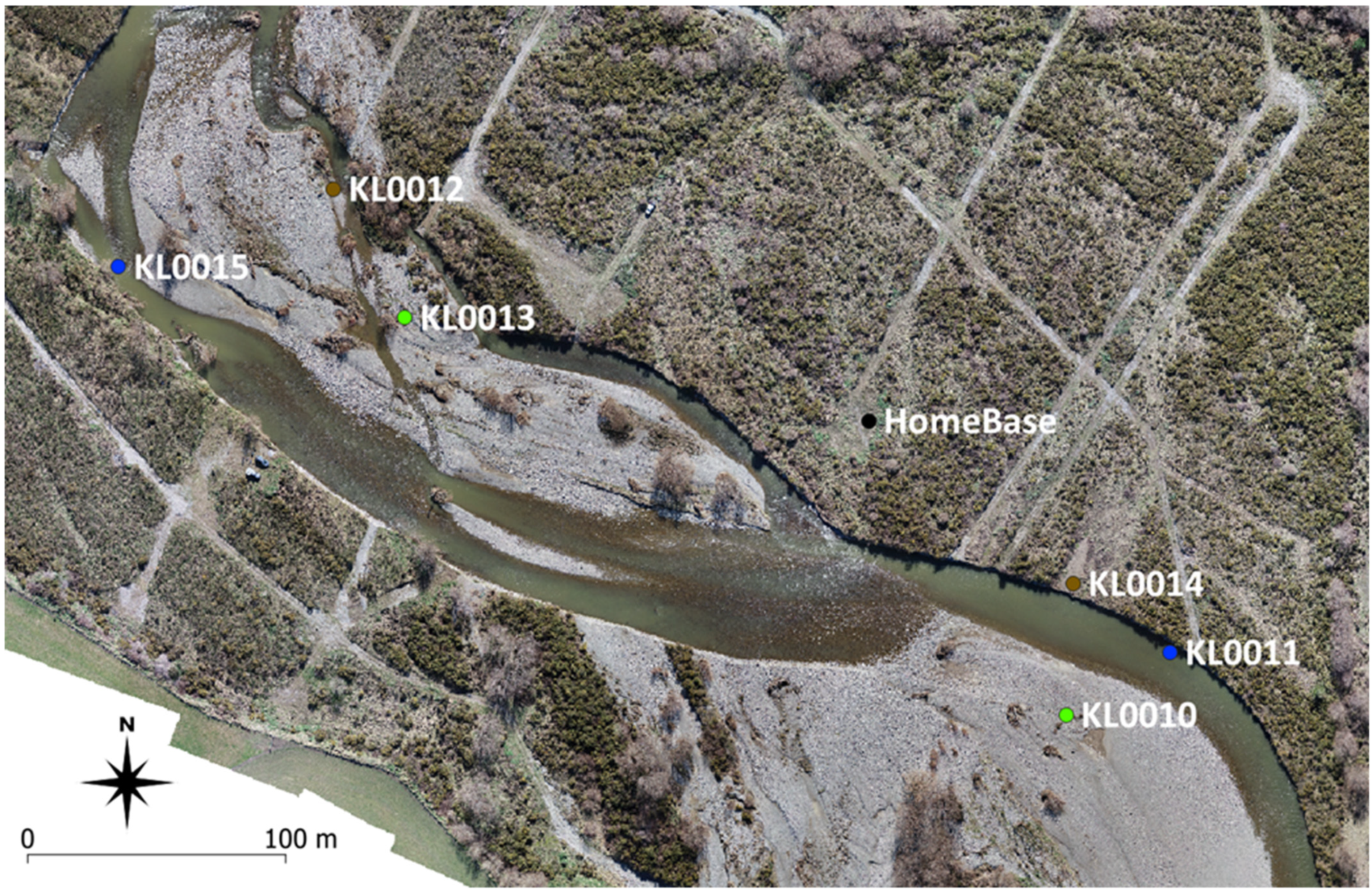
5. Field Tests of Kinematic Logger Recovery Systems
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Walling, D. The Impact of Global Change on Erosion and Sediment Transport by Rivers: Current Progress and Future Challenges; UNESCO: Paris, France, 2009; pp. 1–30. [Google Scholar]
- Boettinger, J. Alluvium and alluvial soils. In Encyclopedia of Soils in the Environment, 1st ed.; Hillel, D., Hatfield, J., Powlson, D., Rosenzweig, C., Scow, K., Singer, M., Sparks, D., Eds.; Elsevier: Amsterdam, The Netherlands, 2005; Volume 1, pp. 45–49. [Google Scholar]
- Ramankutty, N.; Evan, A.; Monfreda, C.; Foley, J. Farming the planet: 1. Geographic distribution of global agricultural lands in the year 2000. Glob. Biogeochem. Cycles 2008, 22, 1–19. [Google Scholar] [CrossRef]
- Garcia, M. Sedimentation Engineering: Processes, Measurements, Modelling, and Practice; ASCE: Reston, VA, USA, 2008; pp. 1–1132. [Google Scholar]
- Gomez, B.; Church, M. An assessment of bed load sediment transport formulae for gravel bed rivers. Water Resour. Res. 1989, 25, 1161–1186. [Google Scholar] [CrossRef]
- Haddadchi, A.; Omid, M.; Dehghani, A. Bed load equation analysis using bed load-material grain size. J. Hydrol. Hydromech. 2013, 61, 241–249. [Google Scholar] [CrossRef] [Green Version]
- McEwan, I.; Habersack, H.; Heald, J. Discrete particle modelling and active tracers: New techniques for studying sediment transport as a Lagrangian phenomenon. In Gravel Bed Rivers V; Mosley, M., Ed.; NZHS: Wellington, New Zealand, 2001; pp. 339–360. [Google Scholar]
- Gomez, B. Bedload transport. Earth-Sci. Rev. 1991, 31, 89–132. [Google Scholar] [CrossRef]
- Gray, J.; Laronne, J.; Marr, J. Bedload-Surrogate Monitoring Technologies; USGS: Reston, VA, USA, 2010; pp. 1–48. [Google Scholar]
- Lane, S.; Richards, K.; Chandler, J. Morphological estimation of the time-integrated bed load transport rate. Water Resour. Res. 1995, 31, 761–772. [Google Scholar] [CrossRef]
- Rickenmann, D. Bed-Load Transport Measurements with Geophones and Other Passive Acoustic Methods. J. Hydraul. Eng. 2017, 143, 03117004. [Google Scholar] [CrossRef]
- Vázquez-Tarrío, D.; Recking, A.; Liébault, F.; Tal, M.; Menéndez-Duarte, R. Particle transport in gravel-bed rivers: Revisiting passive tracer data. Earth Surf. Proc. Landf. 2019, 44, 112–128. [Google Scholar] [CrossRef]
- Edwards, T.; Glysson, G. Field Methods for Measurement of Fluvial Sediment; USGS: Reston, VA, USA, 1999; pp. 1–97. [Google Scholar]
- Hicks, D.M.; Gomez, G. Sediment Transport. In Tools in Fluvial Geomorphology, 2nd ed.; Kondolf, M., Piégay, H., Eds.; John Wiley & Sons: Chichester, UK, 2016. [Google Scholar]
- Whiting, P.; Stamm, J.; Moog, D.; Orndorff, R. Sediment-transporting flows in headwater streams. Geol. Soc. Am. Bull. 1999, 111, 450–466. [Google Scholar] [CrossRef]
- Habersack, H. Radio-tracking gravel particles in a large braided river in New Zealand: A field test of the stochastic theory of bed load transport proposed by Einstein. Hydrol. Process. 2001, 15, 377–391. [Google Scholar] [CrossRef]
- Habersack, H. Use of radio-tracking techniques in bed load transport investigations. In Erosion and Sediment Transport Measurement in Rivers: Technological and Methodological Advances; Bogen, J., Fergus, T., Walling, D., Eds.; IAHS Press: Wallingford, UK, 2003; pp. 172–180. [Google Scholar]
- Nichols, M. A radio frequency identification system for monitoring coarse sediment particle displacement. Appl. Eng. Agric. 2004, 20, 783. [Google Scholar] [CrossRef] [Green Version]
- Lamarre, H.; MacVicar, B.; Roy, A. Using passive integrated transponder (PIT) tags to investigate sediment transport in gravel-bed rivers. J. Sediment. Res. 2005, 75, 736–741. [Google Scholar] [CrossRef]
- Liedermann, M.; Tritthart, M.; Habersack, H. Particle path characteristics at the large gravel-bed river Danube: Results from a tracer study and numerical modelling. Earth Surf. Proc. Landf. 2013, 38, 512–522. [Google Scholar] [CrossRef]
- May, C.; Pryor, B. Initial motion and bedload transport distance determined by particle tracking in a large regulated river. River Res. Appl. 2014, 30, 508–520. [Google Scholar] [CrossRef]
- Cassel, M.; Piégay, H.; Lavé, J. Effects of transport and insertion of radio frequency identification (RFID) transponders on resistance and shape of natural and synthetic pebbles: Applications for riverine and coastal bed load tracking. Earth Surf. Proc. Landf. 2017, 42, 399–413. [Google Scholar] [CrossRef]
- Ryder, D.; Mika, S. Smart rocks and sand slugs: Innovative methods for modelling sediment transport in rivers. In Proceedings of 8th Australian Stream Management Conference; Vietz, G., Flatley, A., Rutherfurd, I., Eds.; RBMS: Leura, Australia, 2016; pp. 466–472. [Google Scholar]
- Olinde, L.; Johnson, J. Using RFID and accelerometer-embedded tracers to measure probabilities of bed load transport, step lengths, and rest times in a mountain stream. Water Resour. Res. 2015, 51, 7572–7589. [Google Scholar] [CrossRef] [Green Version]
- Nikora, V.; Habersack, H.; Huber, T.; McEwan, I. On bed particle diffusion in gravel bed flows under weak bed load transport. Water Resour. Res. 2002, 38, 1081. [Google Scholar] [CrossRef]
- Spazzapan, M.; Petrovčič, J.; Mikoš, M. New tracer for monitoring dynamics of sediment transport in turbulent flows. Acta Hydrotech. 2004, 22, 135–148. [Google Scholar]
- Dwivedi, A.; Melville, B.; Akeila, E.; Salcic, Z. Design of ‘Smart’ pebble for sediment entrainment study. In Advances in Fluid Mechanics VII; Rahman, M., Brebbia, C., Eds.; WIT Press: Southampton, UK, 2008; pp. 341–350. [Google Scholar]
- Maniatis, G.; Hoey, T.; Sventek, J. Sensor enclosures: Example application and implications for data coherence. J. Sens. Actuator Netw. 2013, 2, 761–779. [Google Scholar] [CrossRef] [Green Version]
- Gronz, O.; Hiller, P.; Wirtz, S.; Becker, K.; Iserloh, T.; Seeger, M.; Brings, C.; Aberle, J.; Casper, M.; Ries, J. Smartstones: A small 9-axis sensor implanted in stones to track their movements. Catena 2016, 142, 245–251. [Google Scholar] [CrossRef] [Green Version]
- Solc, T.; Stefanovska, A.; Hoey, T.; Mikoš, M. Application of an instrumented tracer in an abrasion mill for rock abrasion studies. J. Mech. Eng. 2012, 58, 263–270. [Google Scholar] [CrossRef]
- McGinnis, R.; Perkins, N. A highly miniaturized, wireless inertial measurement unit for characterizing the dynamics of pitched baseballs and softballs. Sensors 2012, 12, 11933–11945. [Google Scholar] [CrossRef] [Green Version]
- Volkwein, A.; Klette, J. Semi-automatic determination of rockfall trajectories. Sensors 2014, 14, 18187–18210. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Caviezel, A.; Schaffner, M.; Cavigelli, L.; Niklaus, P.; Bühler, Y.; Bartelt, P.; Magno, M.; Benini, L. Design and Evaluation of a Low-Power Sensor Device for Induced Rockfall Experiments. IEEE Trans. Instrum. Meas. 2018, 67, 767–779. [Google Scholar] [CrossRef] [Green Version]
- Kok, M.; Hol, J.; Schön, T. Using inertial sensors for position and orientation estimation. Found. Trends Signal Process. 2017, 11, 1–153. [Google Scholar] [CrossRef] [Green Version]
- Pedley, M.; Stanley, M.; Baranski, Z. Freescale Sensor Fusion Kalman Filter (Technical Note); Freescale Semiconductor: Austen, TX, USA, 2014; pp. 1–25. [Google Scholar]
- Qureshi, U.; Shaikh, F.; Aziz, Z.; Shah, S.; Sheikh, A.; Felemban, E.; Qaisar, S. RF path and absorption loss estimation for underwater wireless sensor networks in different water environments. Sensors 2016, 16, 890. [Google Scholar] [CrossRef] [PubMed]
- Goldoni, E.; Prando, L.; Vizziello, A.; Savazzi, P.; Gamba, P. Experimental data set analysis of RSSI-based indoor and outdoor localization in LoRa networks. Internet Technol. Lett. 2019, 2, e75. [Google Scholar] [CrossRef] [Green Version]
- Matt, J. Object-Oriented Tools for Fitting Conics and Quadrics. Available online: https://www.mathworks.com/matlabcentral/fileexchange/87584-object-oriented-tools-for-fitting-conics-and-quadrics (accessed on 1 September 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode/Function | CPU Frequency When Awake | Average Current (mA) | Current Consumption (mAh) |
|---|---|---|---|
| Deployment delay | 10 MHz | 0.175 | Delay duration × 0.175 |
| Logging (awaiting motion interrupt) | 10 MHz | 0.195 | Logging duration × 0.195 |
| Logging (active) | 160 MHz | 46 | 1.83 h × 46 = 84.2 |
| Recovery mode | 10 MHz | 0.175 | Recovery duration × 0.175 |
| LoRa Transmission 14 dBm | 80 MHz | N/A | 0.015 |
| LoRa Transmission 17 dBm | 80 MHz | N/A | 0.017 |
| LoRa Receiving | 80 MHz | 30 | Listening time × 30 |
| Kinematic Logger ID | LoRa Transmission Power | Deployment Environment | Depth (m) | Proximity to Home Base (m) | Time to Recovery the KL (min) | Detected with UAV |
|---|---|---|---|---|---|---|
| KL0010 | 17 dBm | Surface | 0 | 137.1 | 102.5 | Y |
| KL0011 | 17 dBm | Underwater | 0.6 | 146.3 | 105.1 | Y |
| KL0012 | 17 dBm | Buried | 0.7 | 226.1 | 63.1 | Y |
| KL0013 | 14 dBm | Surface | 0 | 184.2 | 70.2 | Y |
| KL0014 | 14 dBm | Buried | 0.6 | 101.3 | 96.9 | Y |
| KL0015 | 14 dBm | Underwater | 1.15 | 295.8 | 77.4 | N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Biggs, H.; Starr, A.; Smith, B.; de Lima, S.; Sykes, J.; Haddadchi, A.; Smart, G.; Hicks, M. Kinematic Loggers—Development of Rugged Sensors and Recovery Systems for Field Measurements of Stone Rolling Dynamics and Impact Accelerations during Floods. Sensors 2022, 22, 1013. https://doi.org/10.3390/s22031013
Biggs H, Starr A, Smith B, de Lima S, Sykes J, Haddadchi A, Smart G, Hicks M. Kinematic Loggers—Development of Rugged Sensors and Recovery Systems for Field Measurements of Stone Rolling Dynamics and Impact Accelerations during Floods. Sensors. 2022; 22(3):1013. https://doi.org/10.3390/s22031013
Chicago/Turabian StyleBiggs, Hamish, Andrew Starr, Brendon Smith, Steve de Lima, Julian Sykes, Arman Haddadchi, Graeme Smart, and Murray Hicks. 2022. "Kinematic Loggers—Development of Rugged Sensors and Recovery Systems for Field Measurements of Stone Rolling Dynamics and Impact Accelerations during Floods" Sensors 22, no. 3: 1013. https://doi.org/10.3390/s22031013
APA StyleBiggs, H., Starr, A., Smith, B., de Lima, S., Sykes, J., Haddadchi, A., Smart, G., & Hicks, M. (2022). Kinematic Loggers—Development of Rugged Sensors and Recovery Systems for Field Measurements of Stone Rolling Dynamics and Impact Accelerations during Floods. Sensors, 22(3), 1013. https://doi.org/10.3390/s22031013