1. Introduction
Recently, human-following mobile robots have been introduced to ease the burden of human operators in various applications [
1,
2,
3]. Robust and reliable human tracking is a key technology of following robots, and it enables mobile robots to operate in cooperation with humans. Following robots have been successfully applied in several domains, including logistics [
4,
5], shopping [
6,
7,
8], and smart factories [
9,
10,
11]; however, they are not technically mature and require further technical development for robust and reliable human tracking.
Human-tracking methods can be classified depending on the type of sensors used to measure the location of a target person. Camera vision was generally adopted in previous studies because it provides abundant scene information with relatively low cost [
12]. However, the absence of depth information, a narrow field of view, and malfunctions due to illumination changes make it difficult to use only camera vision for tracking. Depth cameras and LiDAR have been used to supplement camera vision to provide three-dimensional point clouds of a target object. Previous studies have proposed human-tracking methods that combine camera vision with depth camera or LiDAR data [
13,
14]. However, these sensor-fusion methods also have a critical limitation because tracking failure can frequently occur in crowed environments when the camera loses the target when it is hidden by opaque obstacles.
A wireless-communication-based indoor positioning system (IPS) can be used to robustly measure the position of the target person regardless of surrounding obstacles. Even though the accuracy may be affected by the obstacles, the system does not lose the target. Wireless LAN (WLAN) [
15], Bluetooth [
16], and Zigbee [
17] have been used for indoor positioning in various applications, but meter-level positioning errors (>1 m) prevent the use of these systems for human tracking in following robots. Ultra-wideband (UWB)-based IPS, which uses frequency bands ranging from 3.1 to 10.6 GHz with a broad occupancy bandwidth of more than 20% of the central frequency, provides a more accurate position measurement (<30 cm) compared with other IPS methods, and it can be adopted in the following robot as an effective sensor system for human tracking.
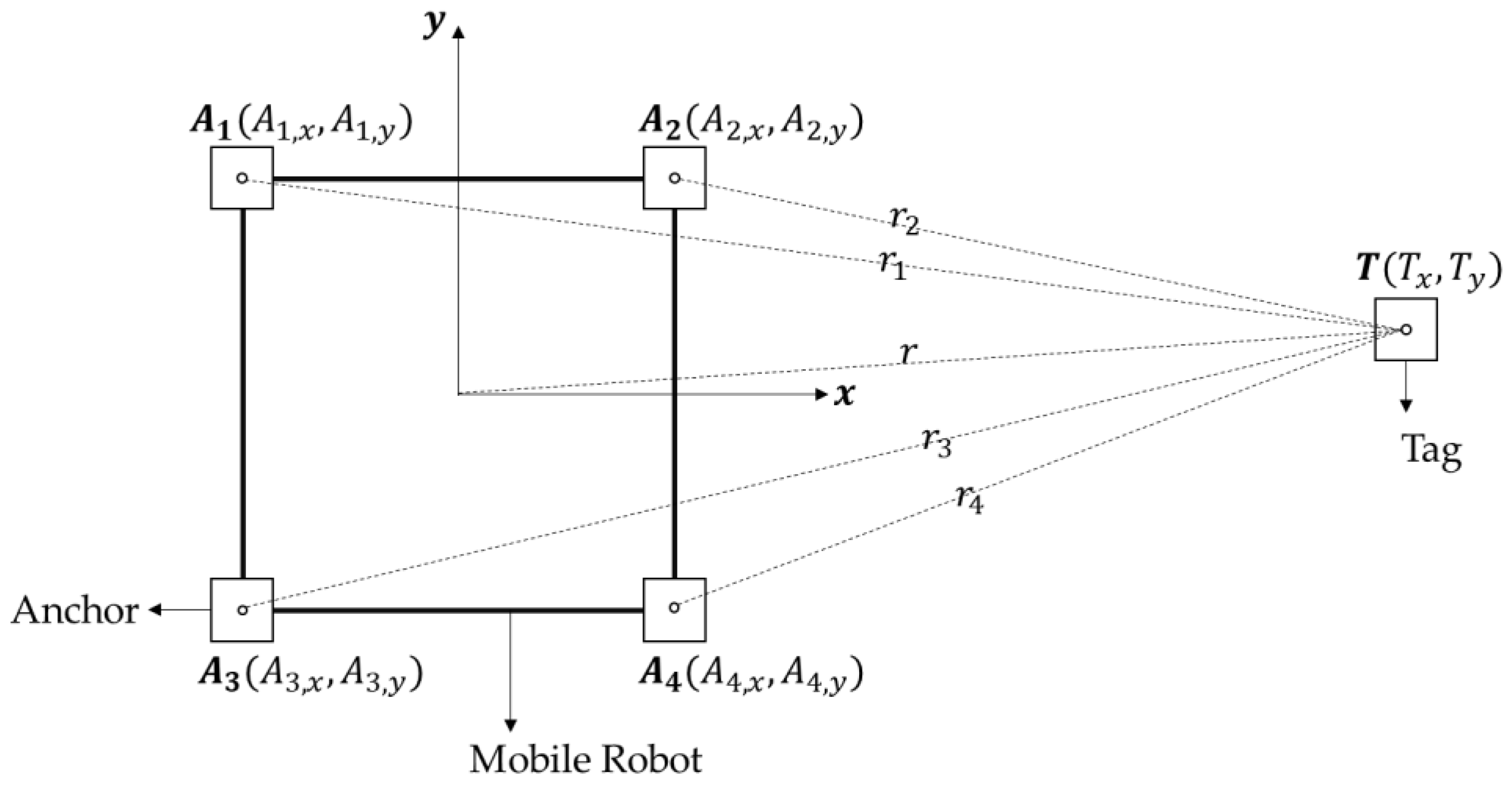
UWB-based IPS is composed of multiple UWB transceiver modules that are stationarily installed in the environment, called anchors, and a transceiver module installed on a moving target, called a tag. The system estimates the position of the tag using the given distances between the tag and each anchor, which are calculated using the time-of-flight of UWB communication. Previous studies describe two types of approaches to reduce positioning errors under the given errors in a distance measurement, i.e., fingerprinting and geometric approaches. In the fingerprinting approaches, machine learning techniques are used to estimate the position of the tag using empirical datasets, which consist of experimentally measured UWB transceiver signals and corresponding true locations [
18,
19]. It provides accurate position estimation for pre-trained environments, but it is difficult to use in practical applications because the positioning accuracies are too dependent on the training datasets, which are not applicable to unknown environments. The geometric approaches estimate the position of the tag utilizing the geometrical relations between the transceivers. The geometric approaches estimate the position of the tag utilizing the geometrical relations between the transceivers. In the literature, several methods have been proposed including receive signal strength (RSS), angle-of-arrival (AOA), time-difference of arrival (TDOA), and time-of-arrival (TOA) [
20]. The geometric approaches can be classified into two categories, i.e., parametric and nonparametric methods, according to the description of the error characteristics in the distance measurement [
18]. The parametric method defines the error characteristics using a probability density function, and it requires a sufficiently large number of samples to ensure the reliability of the probability density function. Maximum likelihood [
21,
22] and Bayesian estimation [
23] have been proposed for the precise parameterization of the error that results in an improvement of the positioning accuracy; however, the accuracy can be critically degraded by variations in the error characteristics. The nonparametric method, which determines the error characteristics based on descriptive statistics, provides a position estimation that is robust to the uncertainties in the errors. Even though the parametric method may demonstrate superior performance in specific cases, the nonparametric method is more appropriate for the UWB-based IPS, owing to device-dependent errors in the UWB-based distance measurement, such as clock drift, frequency drift, and a timestamp that is difficult to represent as a probability density function [
24].
A typical example of the nonparametric method is the least square (LS) approximation. In a practical situation, the LS approximation sensitively responds to non-line-of-sight (NLOS) situations and device-dependent measurement errors [
25]. The weighted least square (WLS) approximation, which introduces weight factors to the LS, was proposed to improve the performance of the LS approximation [
26,
27]; however, it experiences difficulties in determining the weight factors based on the covariance of errors. Residual weighted least square (RWLS) approximation, which evaluates the reliability of data using residuals rather than weight factors, has been proposed to address this problem [
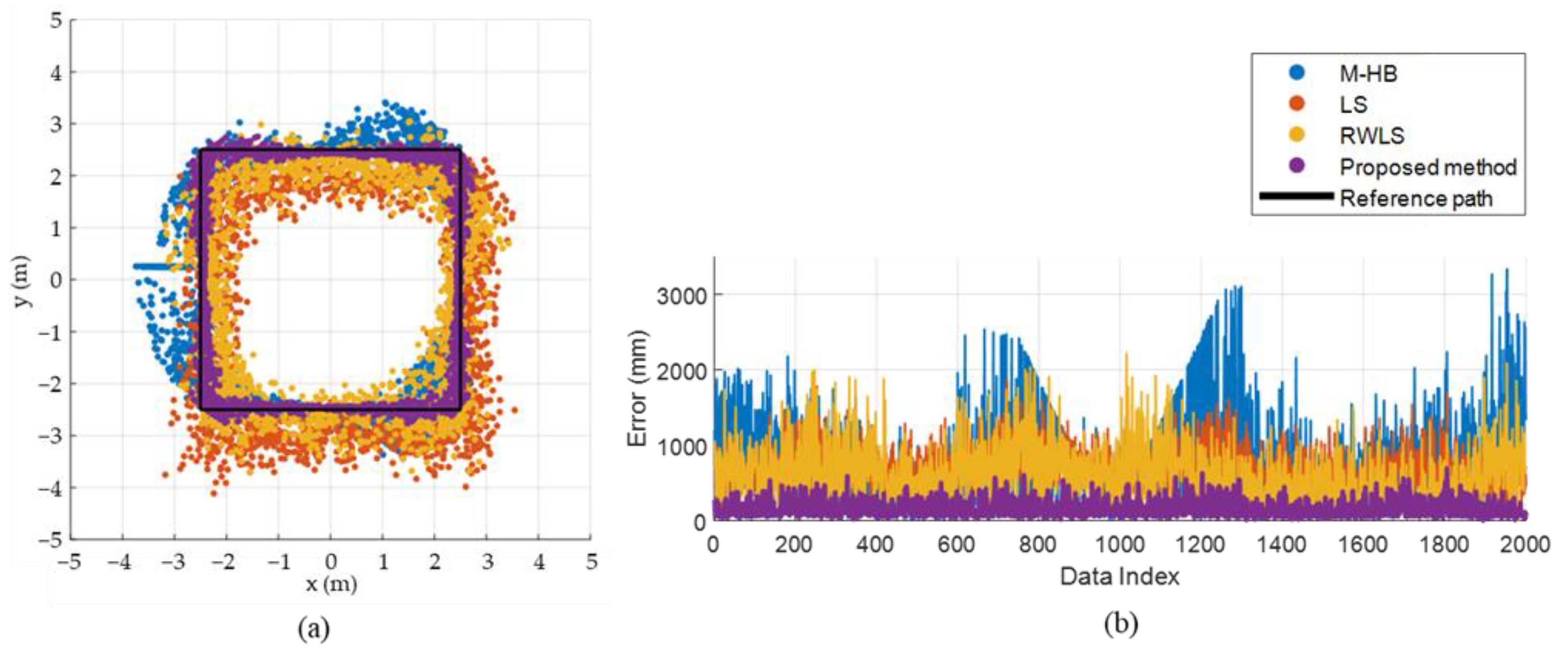
27]. The LS-based approximations find the optimal position estimation inside a particular area bound that covers possible distance-measurement errors. Unlike the LS-based approximation, the modified hyperbolic (M-HB) algorithm estimates the position of the tag by investigating possible intersection points between lines that connect the points of the tag to each anchor [
28]. It uses distance data from two of the three anchors to create two intersections that are probable tag positions, and the remaining anchor determines the correct intersection between the two. However, M-HB has difficulty in identifying the exact position of the tag in the case where the distances between the remaining anchor and the two intersections are same, thereby limiting its angle of use.
Previous UWB-based positioning methods assumed that the UWB transceivers are configured as a UWB tag moves in the area enclosed by multiple (>3) UWB anchors that are stationarily installed in the environment. However, the configuration of the UWB transceivers should be modified for human tracking in the following robot. The UWB anchors should be mounted on the robot because it aims to identify the position of the tag relative to the robot instead of the environment. In this configuration, the positioning error can increase because the tag is located outside the convex hull made by the anchors [
29]. The anchors installed in close proximity also negatively affect the positioning accuracy [
30].
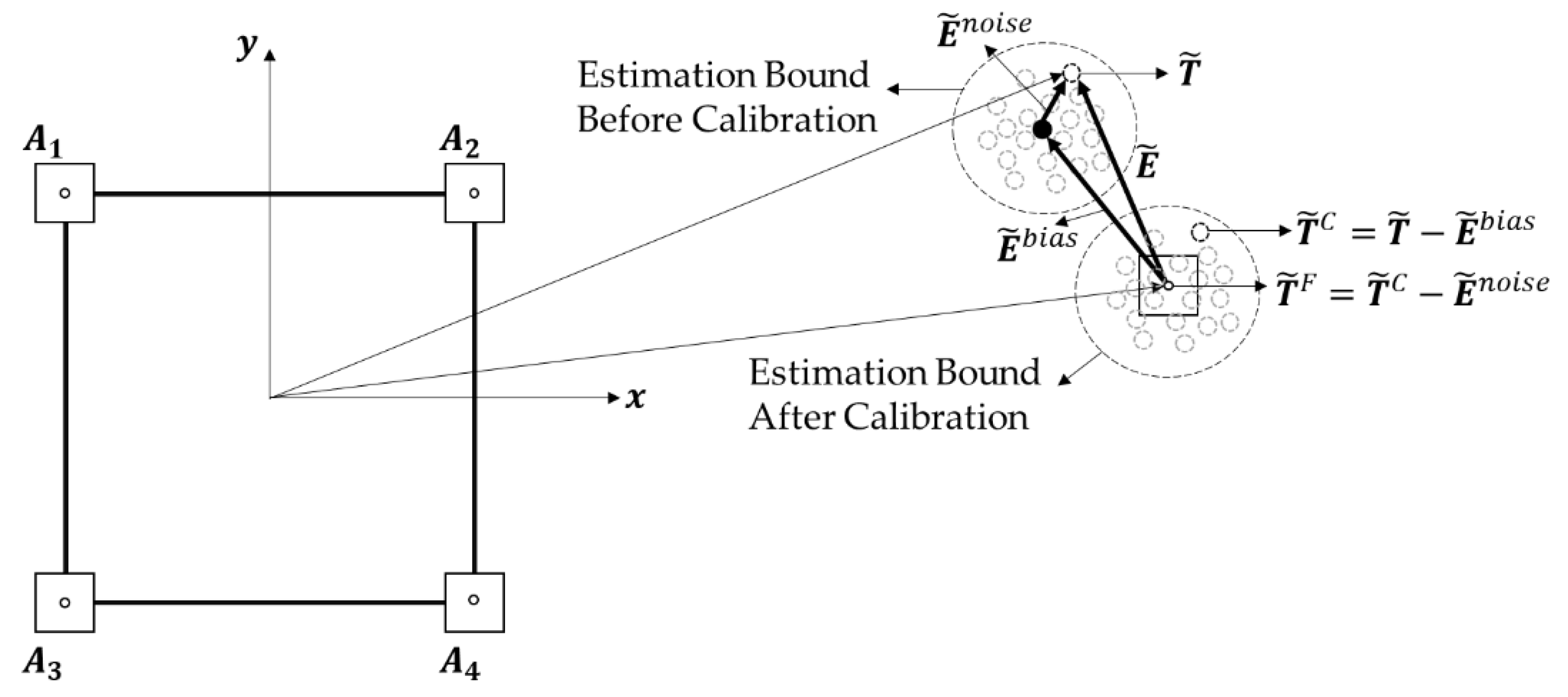
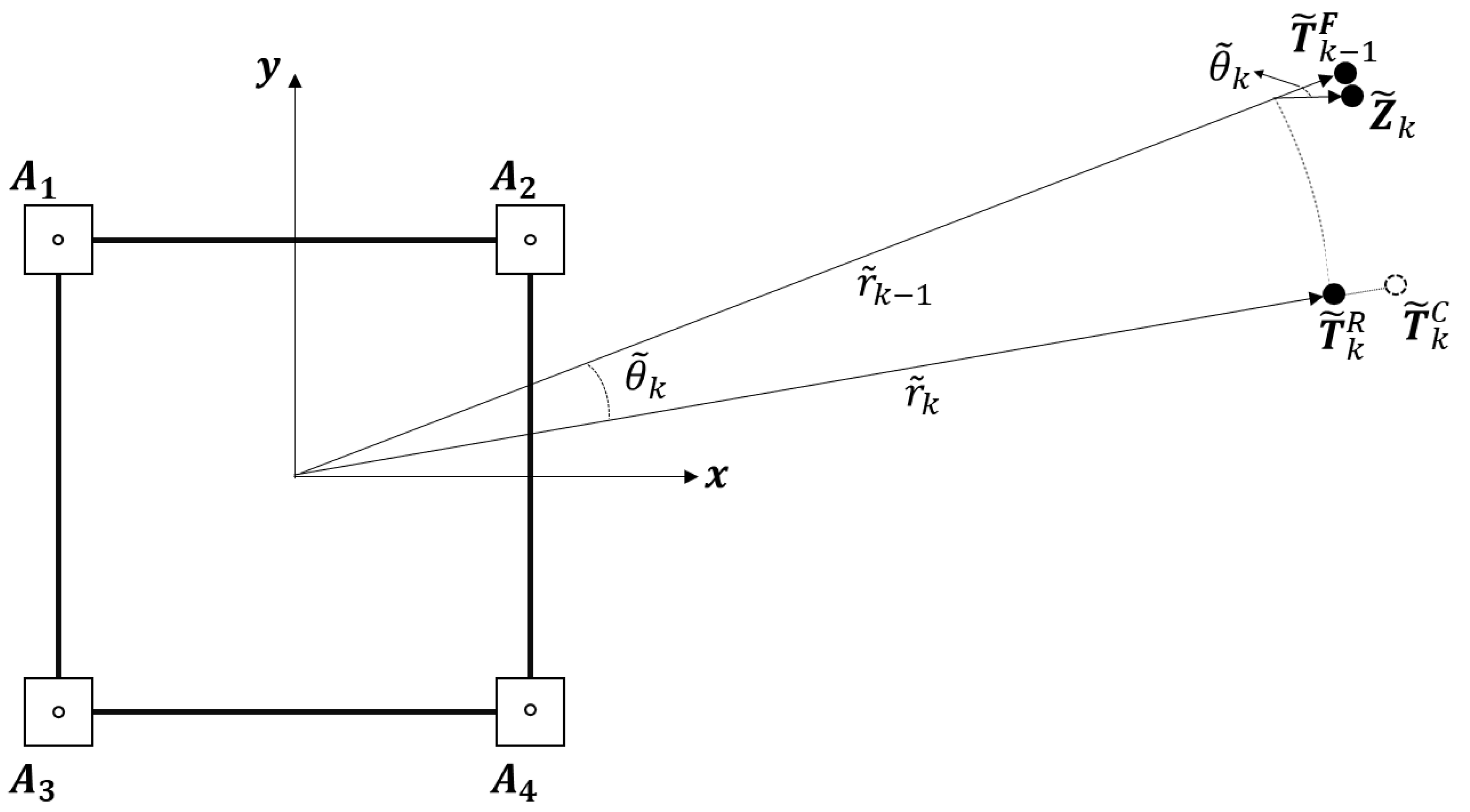
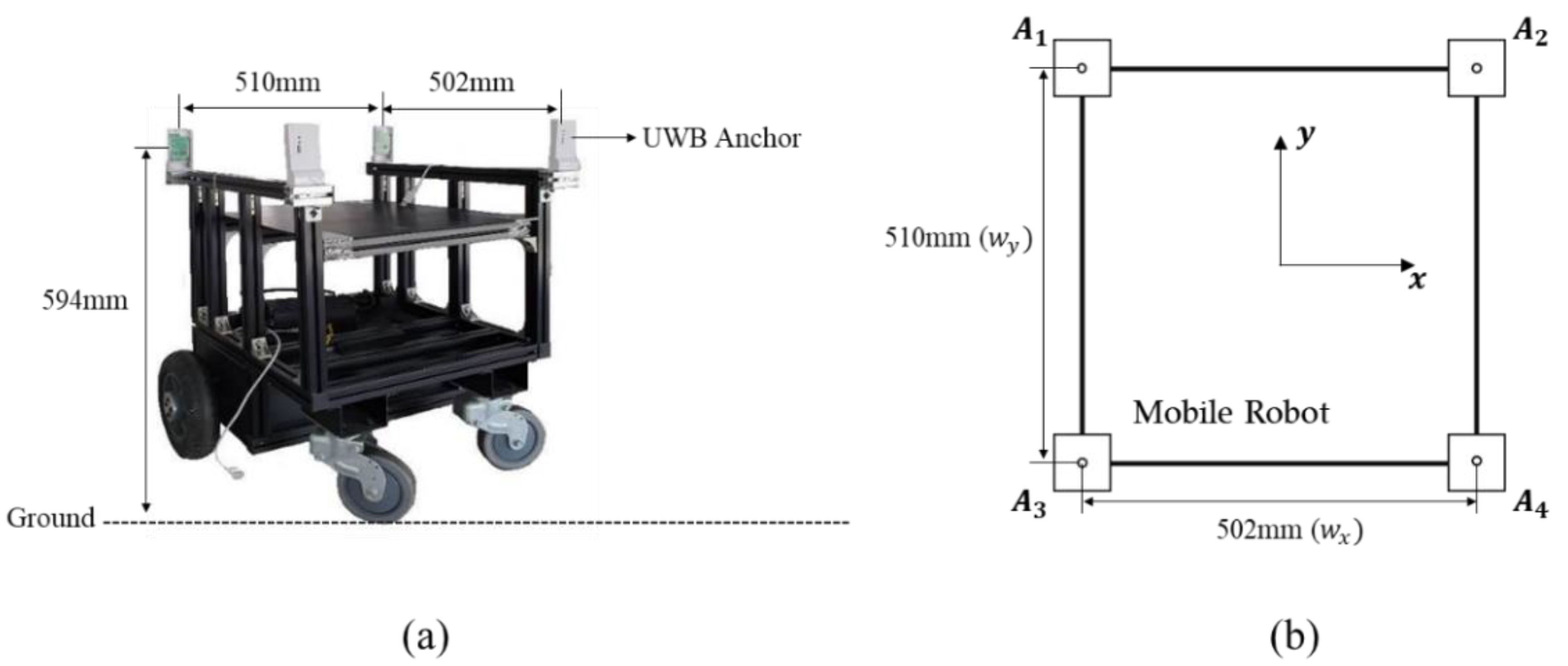
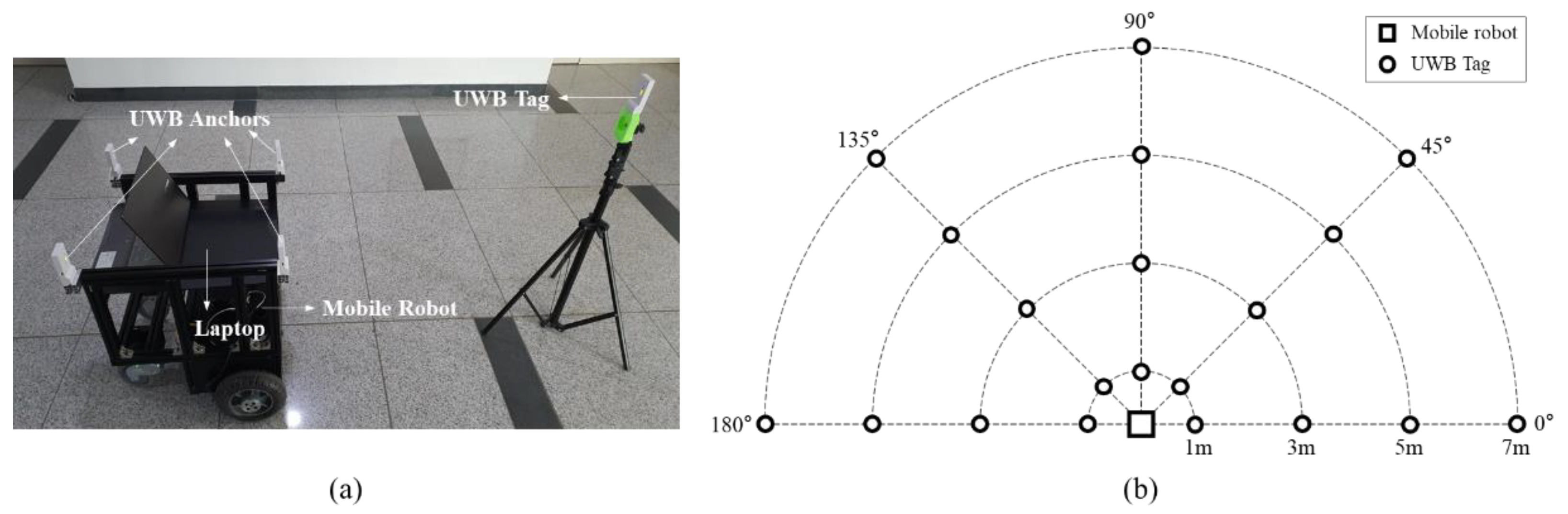
Assuming a configuration in which the human holds a UWB transceiver (tag) and four UWB transceivers are mounted on the mobile robot, this study proposes a novel method to estimate the position of the tag relative to the mobile robot for precise and robust human tracking in the following robot. Based on the previous LS approximation framework, the proposed method improves the positioning accuracy by developing sensor calibration to manage device-dependent error characteristics, as well as the interactive complementary filter to reduce the standard deviation of positioning errors. The main contribution of this study is the novel component-wise localization error correction method that alleviate not only the bias but also the deviation in the localization error. This paper identified two main components of localization error in the LS approximation through the mathematical derivation and proposed the error correction methods that alleviate the errors component by component. As the proposed method precisely tackles each error component based on in-depth error analysis, it achieved superior localization performance compared to the methods proposed in the literature. The contributions of this paper are as follows:
This study proposes a component-wise error correction method to increase the accuracy of UWB localization based on the in-depth analysis of UWB error characteristics. The core UWB error components are classified into two parts, i.e., bias and noise, and error corrections that fit into each component are proposed.
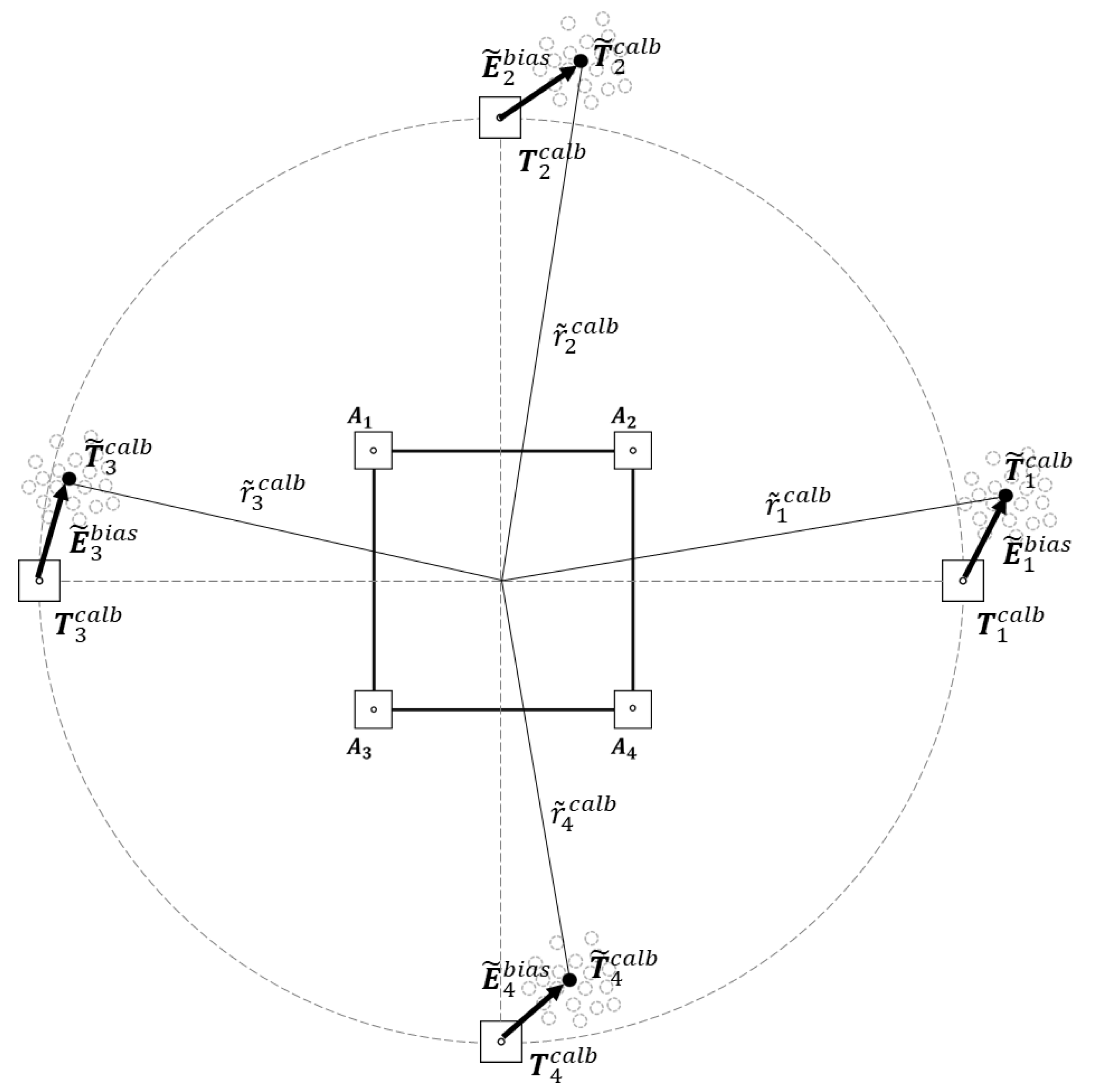
The sensor calibration is proposed to measure and compensate the device-dependent bias errors, which consistently appear in UWB localization. By conducting the calibration only once in the initialization, it can successfully correct the consistent bias of the localization.
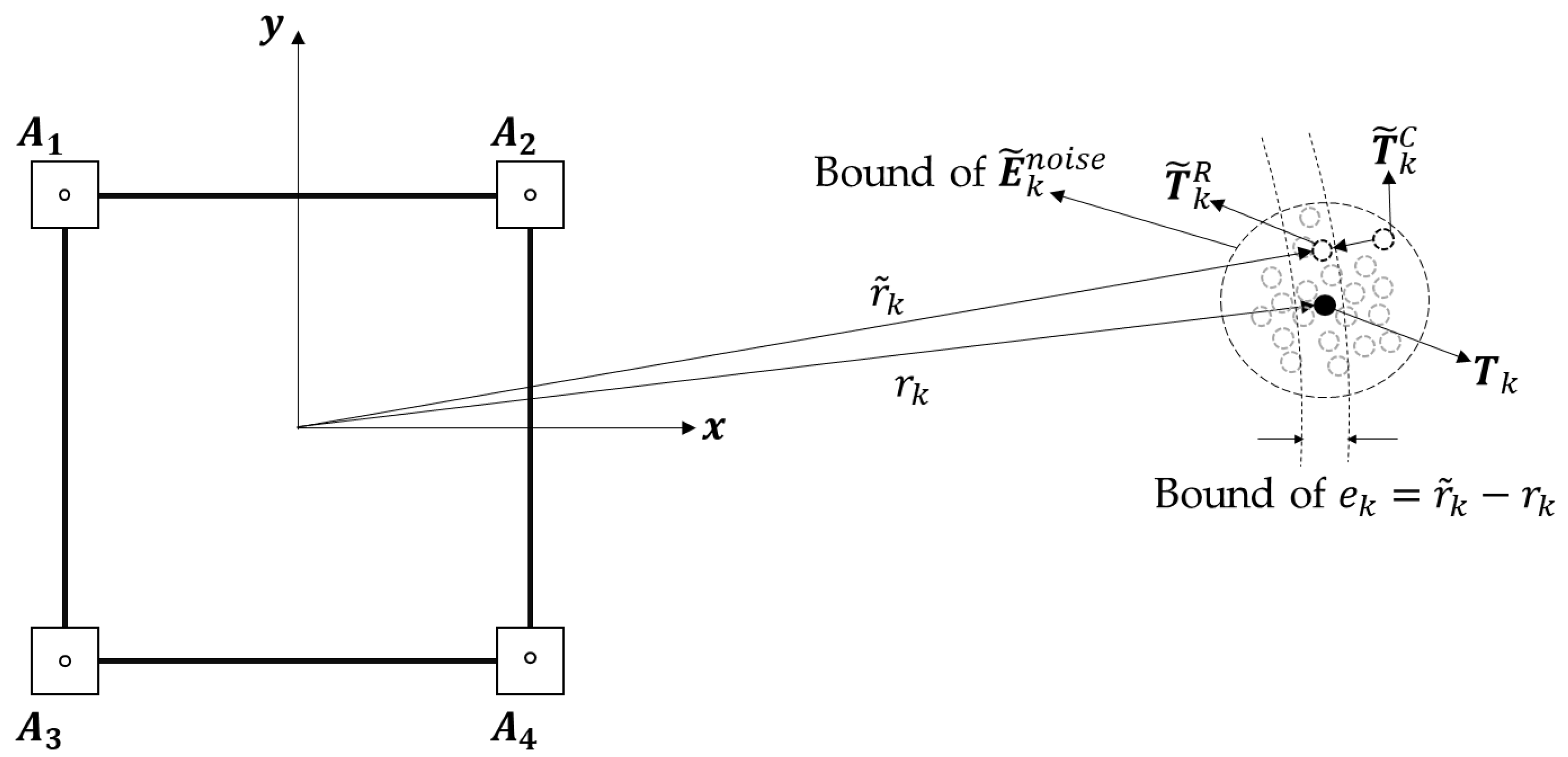
The interactive complementary filter is proposed to alleviate the high-frequency noise of the localization. Radial and tangential components of the localization noise are significantly reduced by the proposed filter.
The following manuscript is structured as follows. In
Section 2, the component-wise error correction method is described in detail including mathematical descriptions on the localization error analysis, initial calibration to correct bias error, and iterative complementary filter to alleviate deviation of the error. In
Section 3, simulation and experimental results are presented to evaluate the performance of the proposed method. In
Section 4, we discuss the advantages and limitations and conclude the paper in the following section.
4. Discussion
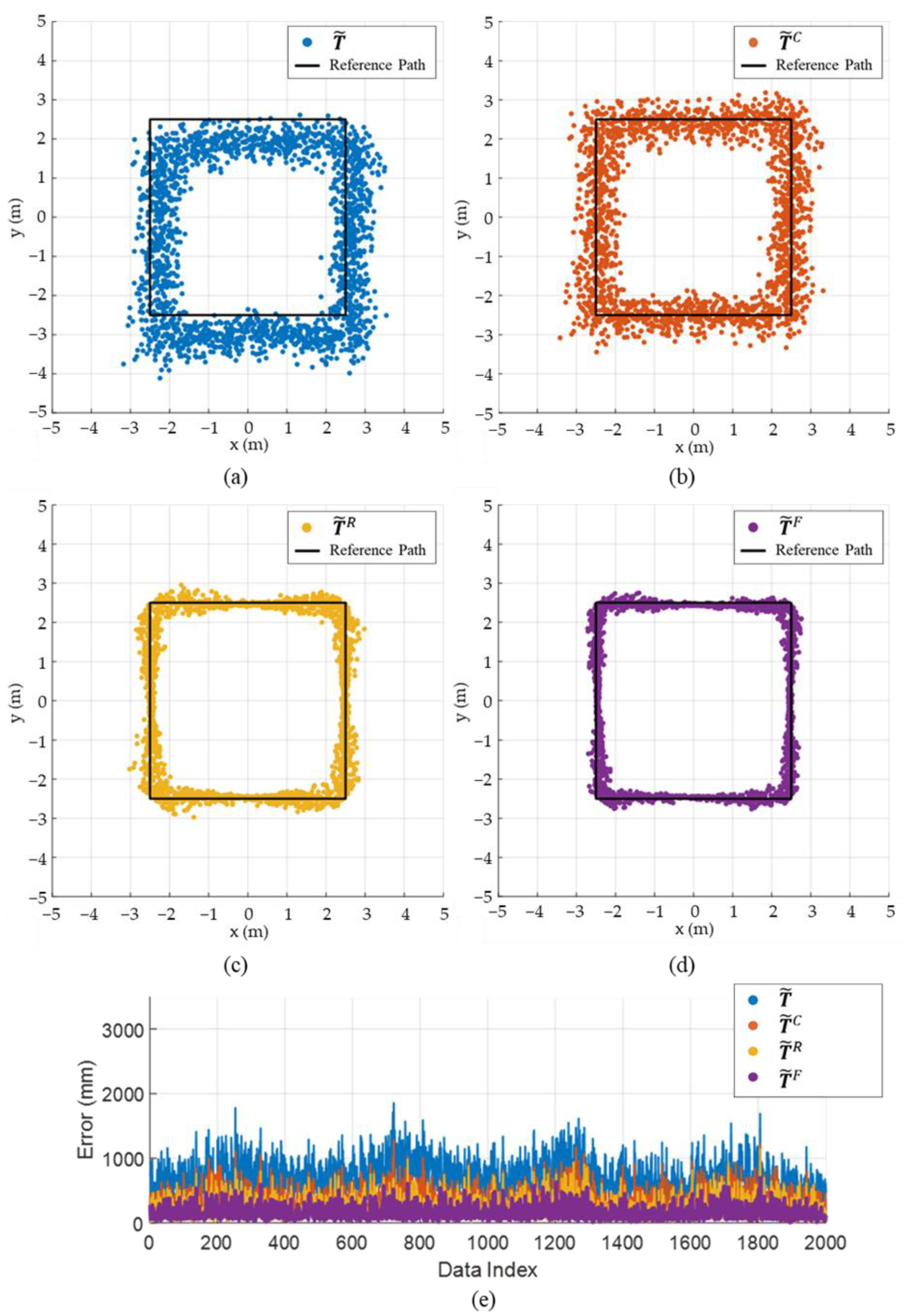
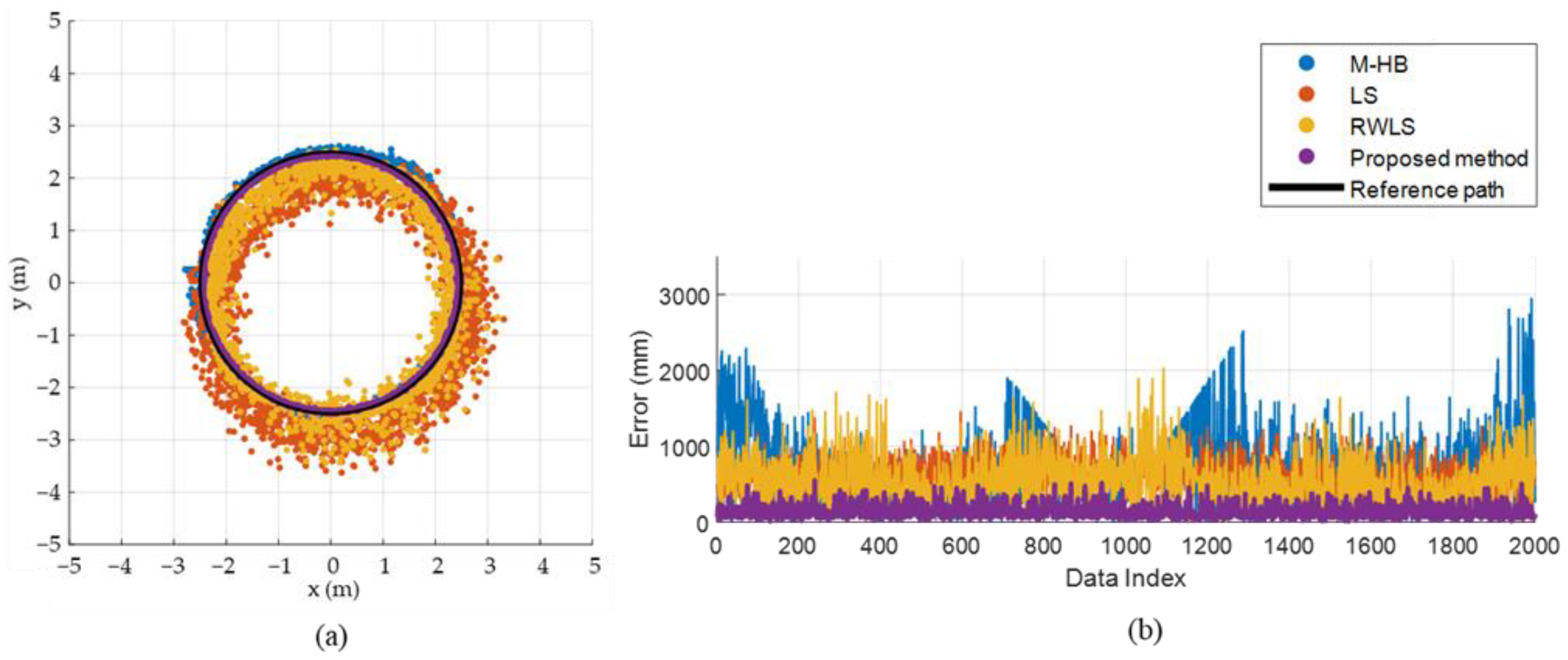
In the proposed UWB localization method, the anchors are mounted in a narrow region constrained by the size of the mobile robot, and the tag is positioned outside of the convex hull of the anchors. This results in large errors that are proportional to the distance between the tag and the anchors. To overcome this disadvantageous UWB configuration and to enhance localization accuracy, this study proposed component-wise error corrections that effectively alleviate device-dependent bias and high-frequency noise component by component based on the in-depth analysis of localization errors. The experimental validation shows that the localization errors were considerably improved by up to 50.6% by applying the proposed initial calibration and the ICF compared with the conventional LS approximation.
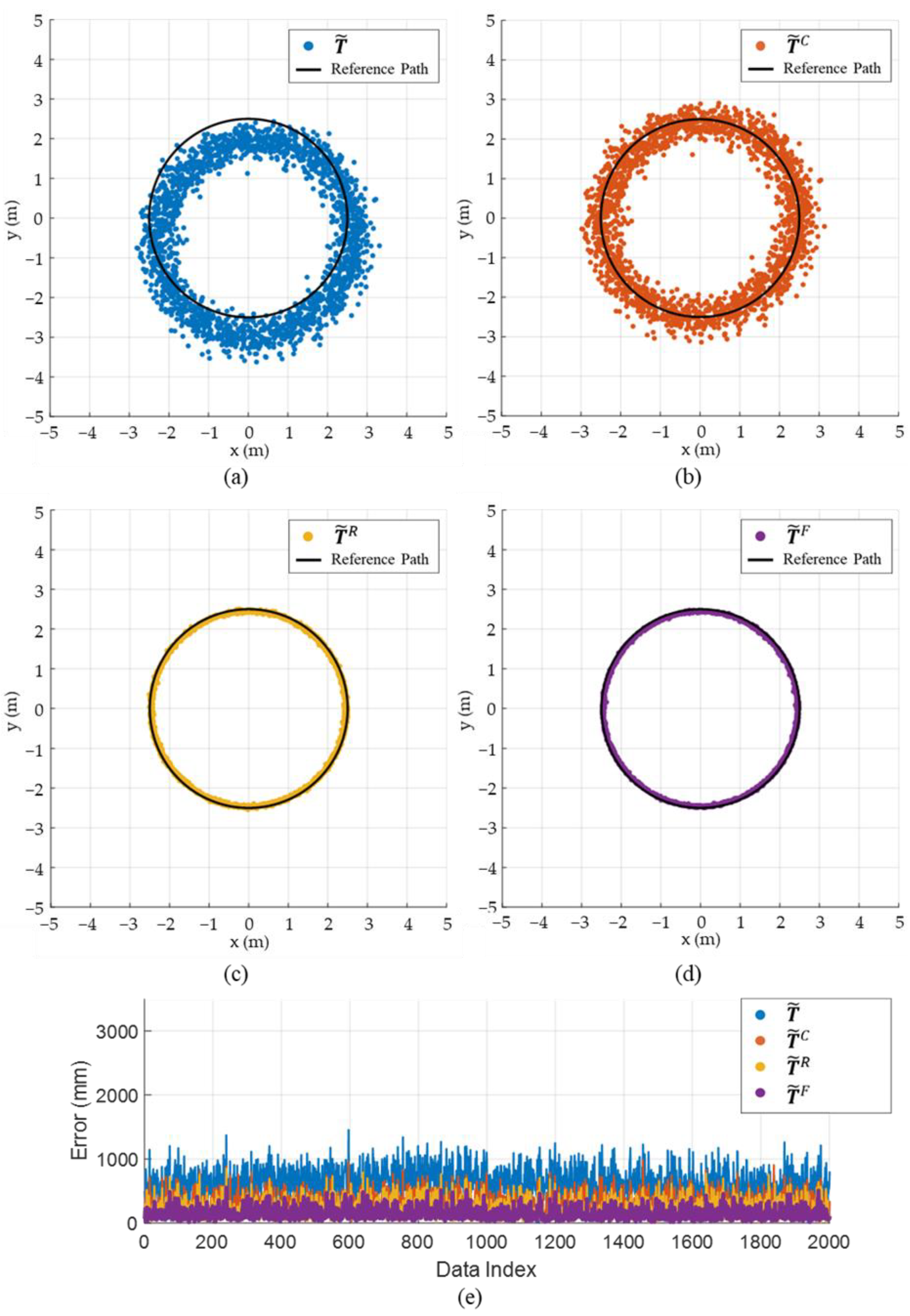
The UWB localization errors originate from the errors in the distance measurement between the anchor and tag pair, which varies depending on both the device and antenna orientations. Hence, calibrating the distance-measurement errors for each anchor and tag pair cannot effectively remove the resultant localization bias. This study proposed an initial calibration method to measure the localization bias, which is specific to the given anchor configuration, not to a single anchor module. The bias is measured at four reference positions, in which the tag is located in four different directions from the anchors, to consider the variation in the bias errors depending on the antenna orientation. Furthermore, normalization of the bias enables the calibration of the bias error, not only in various directions, but also at various distances to the tag position. The bias corrections made by the proposed calibration method considerably improved the localization error of the conventional LS approximation by up to 49% in the simulation results.
Although the initial calibration effectively corrects bias errors, noise-like high-frequency error components still remain in the localization. The ICF is proposed to eliminate the high-frequency error component (). Assuming that the distance estimation of the LS approximation is more reliable than the localization, the bias-removed tag position is adjusted in the radial direction before applying the iterative filter. The radial directional deviations were significantly reduced in this step. The remaining error components were alleviated by iteratively updating the current estimation as a weighted sum of the previous and current estimation. In this iterative procedure, the weight values were flexibly determined by evaluating the reliability of each estimation. The ICF contributed to the improvement in the variation of the error, and the standard deviation of the error was substantially improved by up to 62% in the simulation results.
The proposed component-wise error correction method significantly improved target localization accuracy by up to 77 and 51% compared with the LS approximation in the simulation and experimental validation, respectively; however, there is still a limitation that should be addressed in future research. In this paper, the effect of the human, who hold the tag, or any other obstacles causing non-line-of-sight (NLOS) situations to the localization accuracy. We have conducted pilot experiment to identify the human effect to the localization accuracy. The experimental results reveal that the human effect was not significant, but it requires in-depth analysis and additional experiments to prove practical applicability of the proposed method. Although the magnitude and deviation of the error were reduced compared with previous methods, the error still increases as the tag position moves farther away from the anchor, as shown in
Table 6. This error characteristic is inherent to the UWB configuration of the following robot, and it can be improved using additional sensors, such as an inertial measurement unit (IMU). We believe that sensor fusion with the IMU can improve the localization performance of the proposed method in future research.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}