
Optimal Design of PV Systems in Electrical Distribution Networks by Minimizing the Annual Equivalent Operative Costs through the Discrete-Continuous Vortex Search Algorithm

 ,
, 
 ,
,  and
and 
Abstract
:1. Introduction
- The generalization of the proposed master–slave optimization algorithm to accurately locate and size the PV sources in electrical distribution networks with AC or DC operating technologies, which were not previously reported in the current literature.
- The improvement of the current literature reports for the IEEE 33- and 69-bus systems with the classical Chu and Beasley genetic algorithm.
2. Mathematical Formulation
2.1. Formulation of the Objective Function
2.2. Set of Constraints
2.3. Model Interpretation
3. Methodology Proposed
3.1. Slave Stage: Matricial Backward/Forward Power Flow Method
- if the current through the line l leaves the node k;
- if the current through the line l arrives the node k;
- if the line l is not connected to the node k.
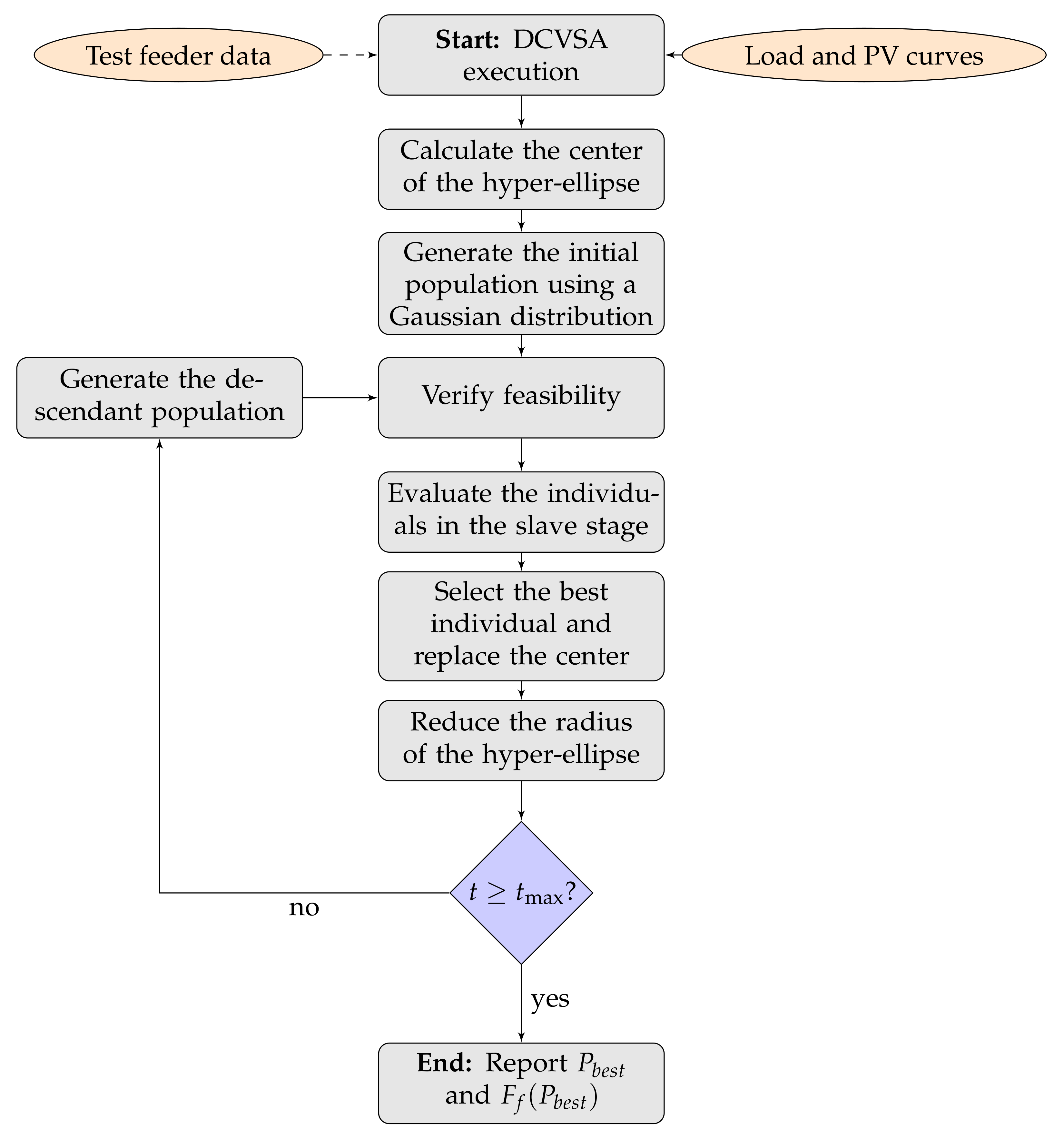
3.2. Master Stage: DCVSA
| Algorithm 1: Solution of the multiperiod power flow problem using the matricial backward/forward power flow formulation to determine the fitness function of the studied optimization problem |
 |
3.2.1. Initial Solution
3.2.2. Candidate Solutions
3.2.3. Updating of the Current Solution
3.2.4. Radius Reduction
4. Test Systems
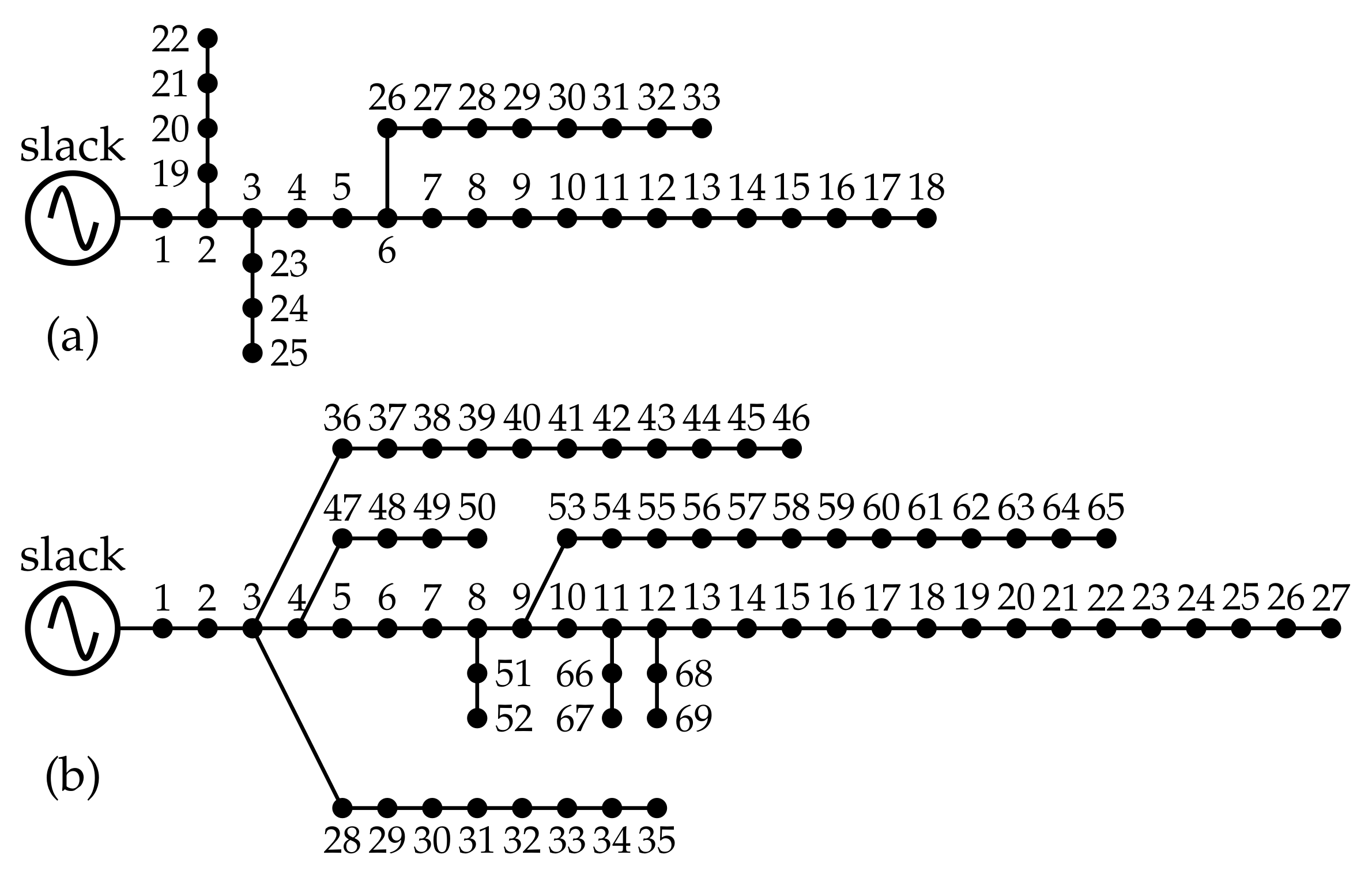
4.1. IEEE 33-Node Test Feeder
4.2. IEEE 69-Node Test Feeder
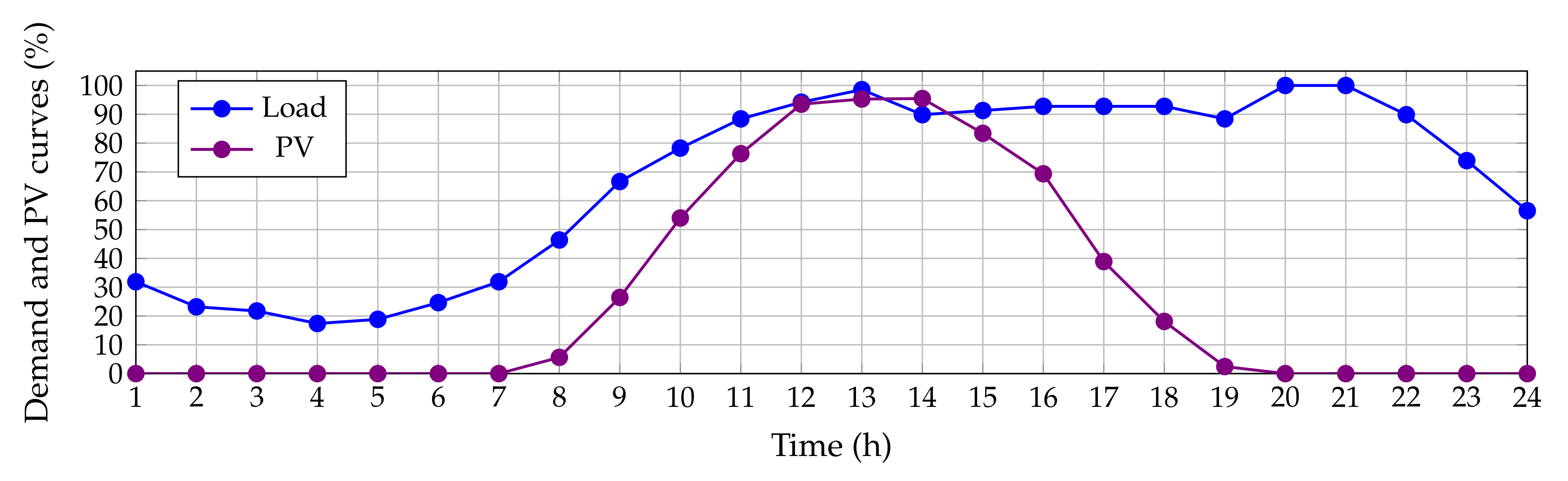
4.3. Demand and Generation Curves
5. Numerical Results and Simulations
- i.
- Application of the DCVSA developed and its comparisons with existing methodologies into the IEEE 33- and IEEE 69-node test systems with their AC versions.
- ii.
- The minimization of the total annual operating cost using the proposed master–slave methodology for the DC versions of the IEEE 33- and IEEE 69-bus systems.
5.1. Case 1: Results in the AC IEEE 33-Bus System
5.2. Case 1: Results in the AC IEEE 69-Nodes System
5.3. Case 2: Results in the DC IEEE 33-Bus System
5.4. Case 2: Results in the DC IEEE 69-Node System
6. Conclusions and Future Works
- ✓
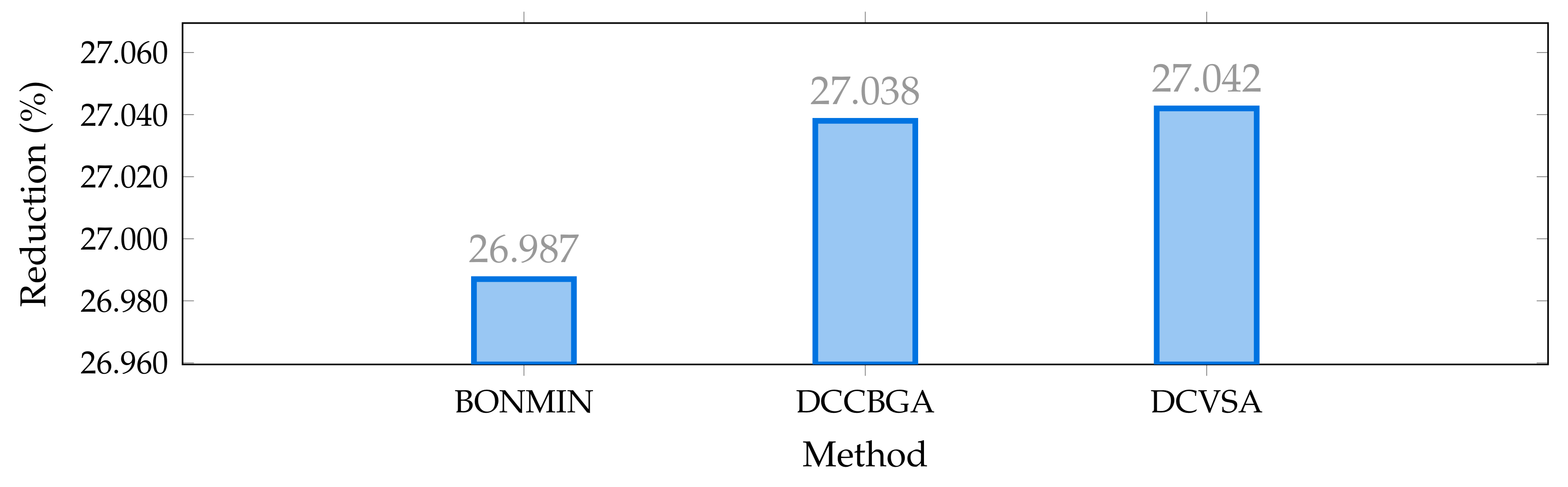
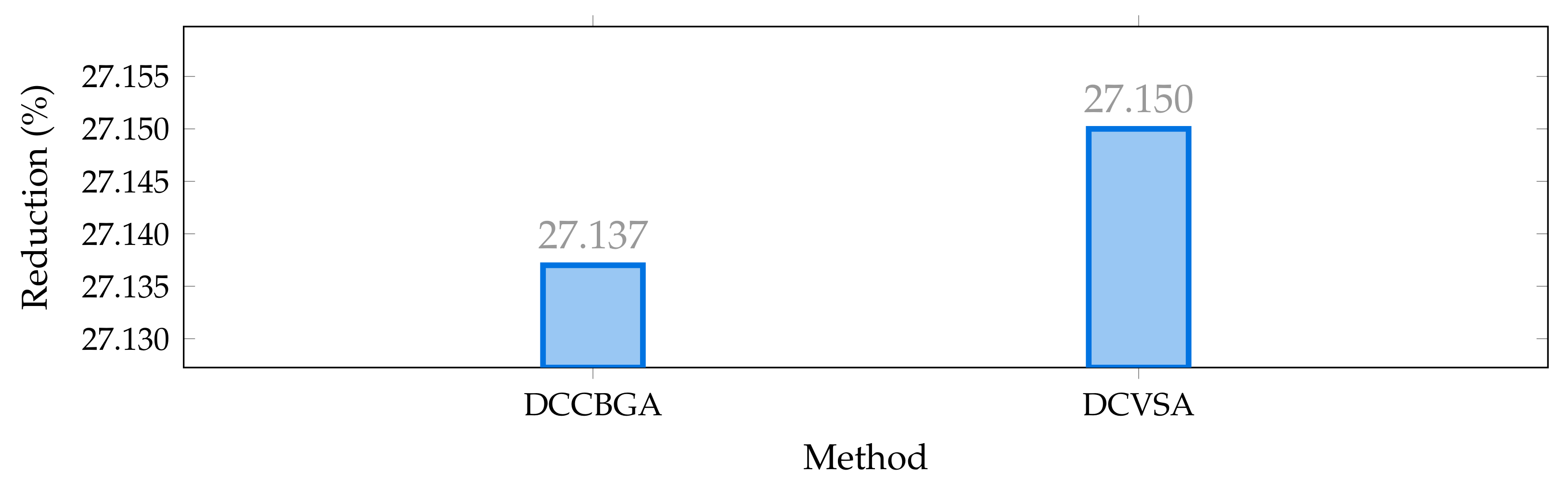
- The reduction from the base case reached by DCVSA was 27.04%, and 27.15% for the test systems in their AC version; in their DC versions, the reductions were 26.94% and 27.03%, respectively.
- ✓
- The proposed methodology obtained the lower standard deviation values when solving the PV units’ location and sizing problem for the IEEE 33- and IEEE 69-node test systems in their AC versions, with the values of US$/year 1154.08 and US$/year 2666.46, respectively. These values were considerably lower than the comparative DCCBGA, which confirmed the effectiveness and robustness of the proposed DCVSA to solve the studied problem ensuring that at each evaluation, the final objective function value will produce a small variation. In the case of the DC grids, these values were US$/year 1652.82 and US$/year 2710.94.
- ✓
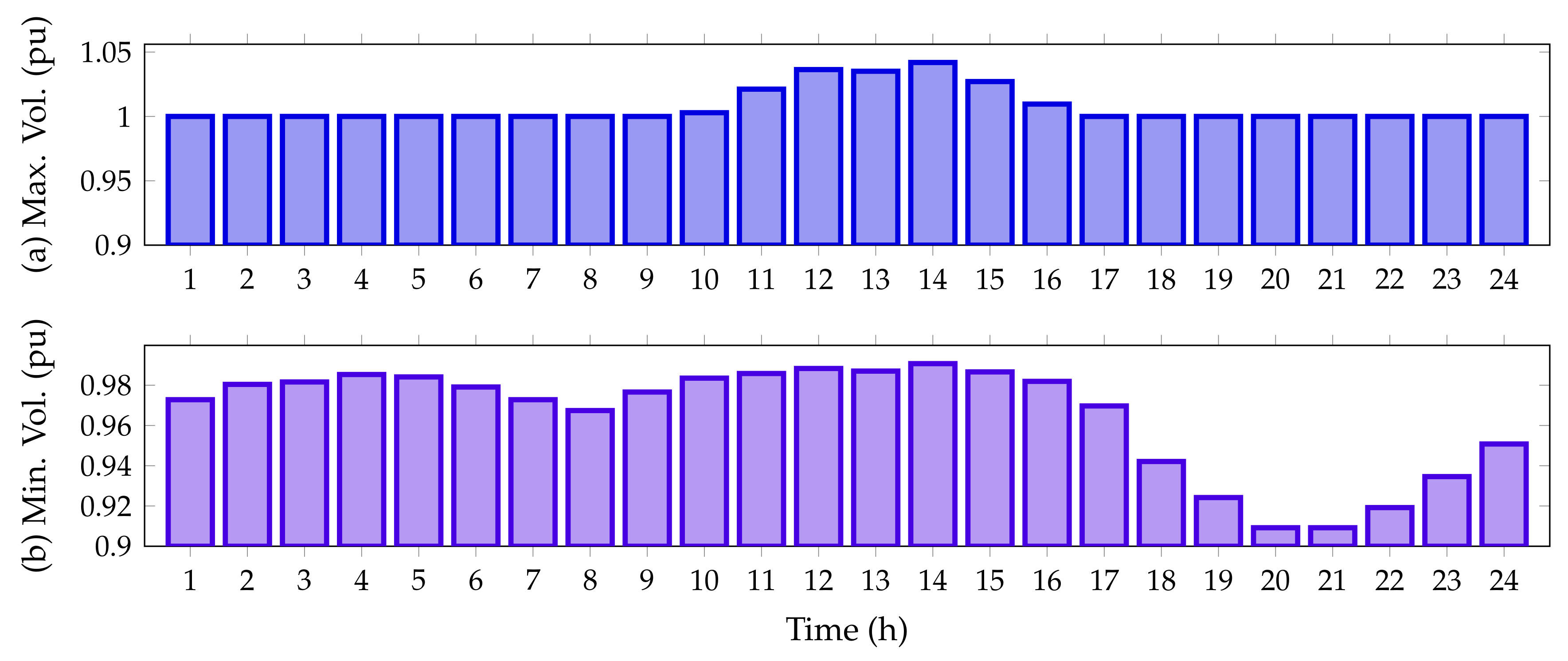
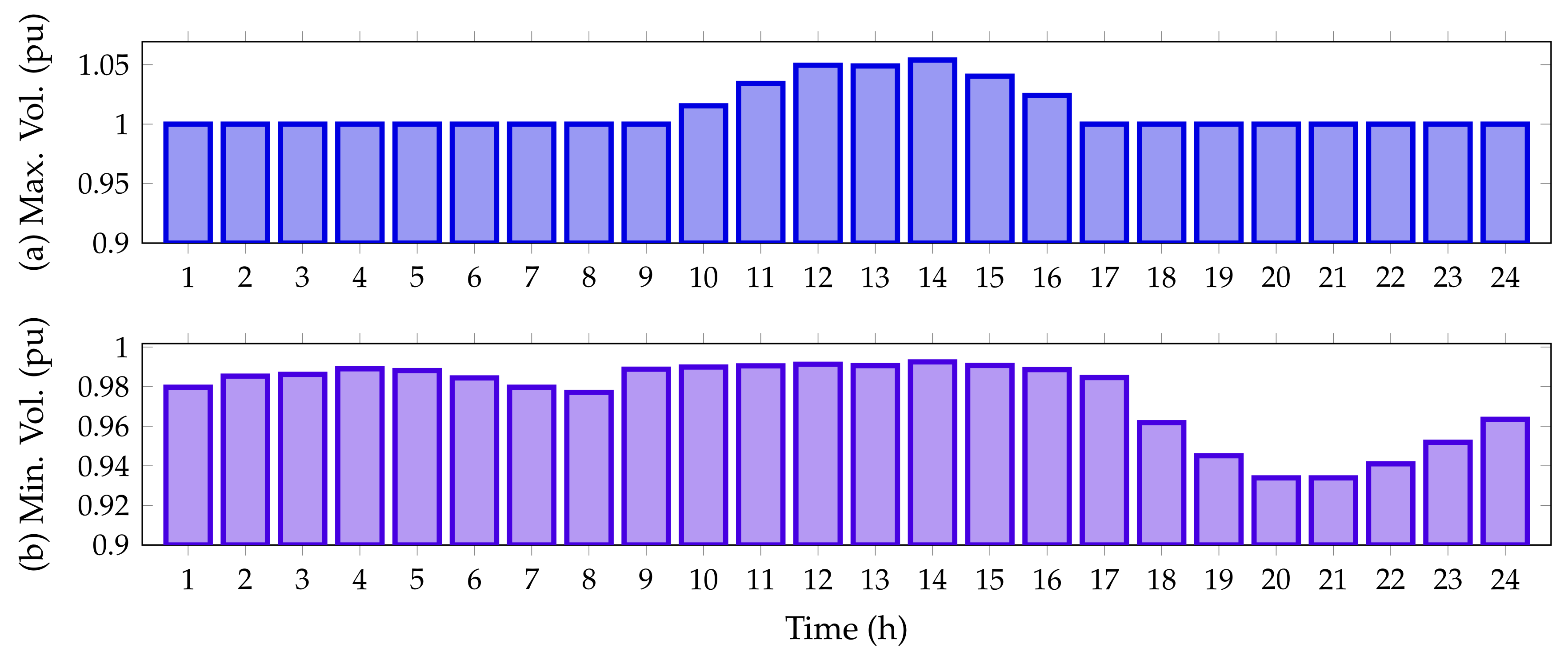
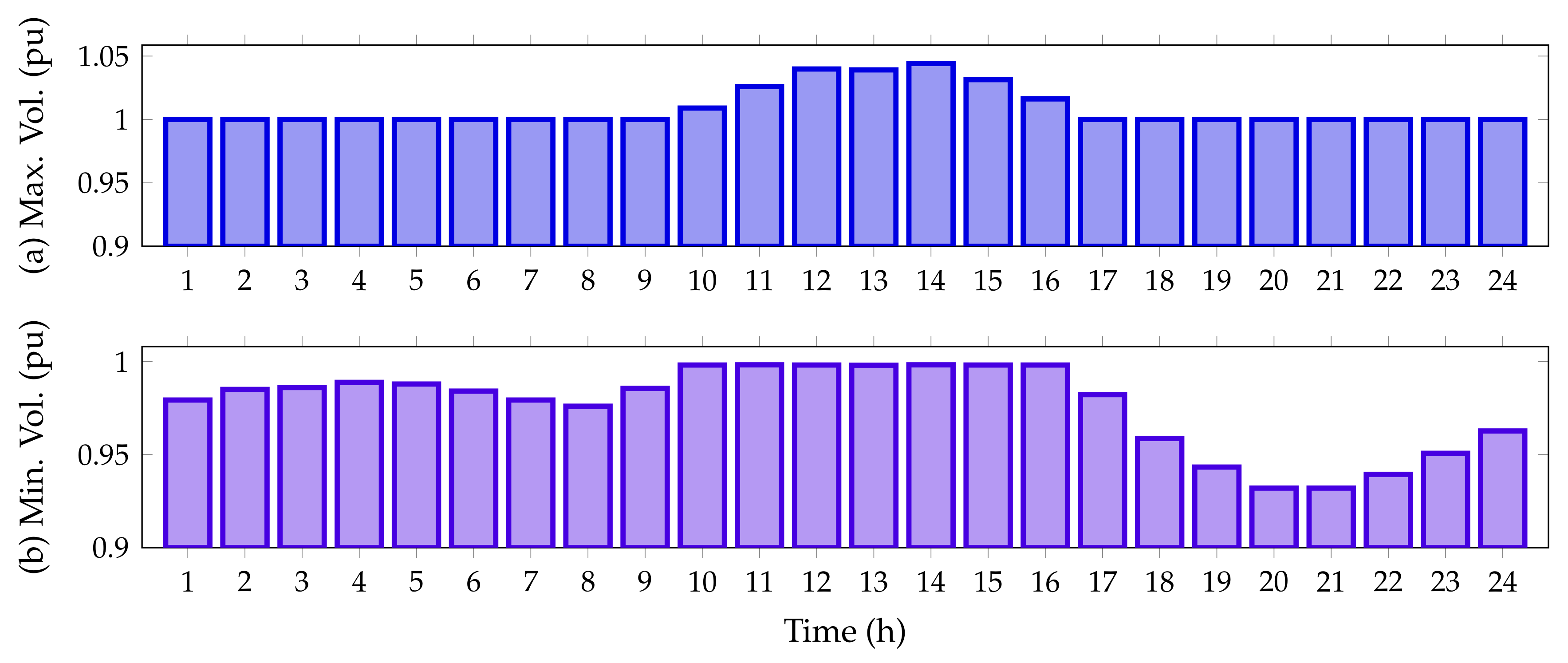
- Regarding the voltage profiles of both systems in their AC version, it was observed that, during the period of maximum PV energy injection, i.e., hour 14, the voltage at some nodes is above the voltage at the substation node, with the magnitudes 1.0291 pu and 1.0419 pu, respectively, while the minimum voltage values found during the time period of maximum power demand and minimum PV energy injection, i.e., in hours 20 and 21, had values of 0.9038 pu and 0.90919 pu, respectively. The same behavior was experienced in the DC grid equivalents. The most significant characteristic of these results is that it recorded evidence that the voltage regulation bounds assigned in of the nominal voltage were always fulfilled by the solutions reached by the DCVSA.
- ✓
- The proposed solution methodology is independent of the number of nodes of the AC or DC network under study; however, in the number of nodes of the grid increase, the solution space size increases as well; this implies that the total processing times required to identify the optimal solution will also increase; however, these increments can be from a few minutes to hours, which is not a critical aspect in distribution system planning projects where the solution quality assumes the greatest importance instead of the total processing times.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Löfquist, L. Is there a universal human right to electricity? Int. J. Hum. Rights 2020, 24, 711–723. [Google Scholar] [CrossRef]
- Matias-Camargo, S.R. Los servicios públicos como derechos fundamentales. Derecho Real. 2014, 12, 315–329. [Google Scholar] [CrossRef]
- Sarkodie, S.A.; Adams, S. Electricity access, human development index, governance and income inequality in Sub-Saharan Africa. Energy Rep. 2020, 6, 455–466. [Google Scholar] [CrossRef]
- Bouzid, A.M.; Guerrero, J.M.; Cheriti, A.; Bouhamida, M.; Sicard, P.; Benghanem, M. A survey on control of electric power distributed generation systems for microgrid applications. Renew. Sustain. Energy Rev. 2015, 44, 751–766. [Google Scholar] [CrossRef] [Green Version]
- Jursová, S.; Burchart-Korol, D.; Pustějovská, P.; Korol, J.; Blaut, A. Greenhouse gas emission assessment from electricity production in the Czech Republic. Environments 2018, 5, 17. [Google Scholar] [CrossRef] [Green Version]
- Abdmouleh, Z.; Gastli, A.; Ben-Brahim, L.; Haouari, M.; Al-Emadi, N.A. Review of optimization techniques applied for the integration of distributed generation from renewable energy sources. Renew. Energy 2017, 113, 266–280. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Fouad, M. Control and Optimization of Distributed Generation Systems; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Dhivya, S.; Arul, R. Demand Side Management Studies on Distributed Energy Resources: A Survey. Trans. Energy Syst. Eng. Appl. 2021, 2, 17–31. [Google Scholar] [CrossRef]
- García, F.N.J.; Cardona, L.F.E.; Lopez, O.L.O.; Franco, A.M.R. Characterization of photovoltaic solar energy systems in a Colombian region. Investigación e Innovación en Ingenierías 2021, 9, 157–174. [Google Scholar] [CrossRef]
- Moreno, R.; Larrahondo, D. The First Auction of Non-Conventional Renewable Energy in Colombia: Results and Perspectives. Int. J. Energy Econ. Policy 2021, 11, 528. [Google Scholar] [CrossRef]
- Fajardo, P.; Ávila, R.; Aristizábal, A.J.; Ospina, D. Transition of energy policy and regulation on distributed generation (DG) in Colombia. AIP Conf. Proc. 2019, 2123, 020013. [Google Scholar]
- IPSE. Boletín Datos IPSE Septiembre 2021; IPSE: Bogotá, Colombia, 2021. [Google Scholar]
- Paz-Rodríguez, A.; Castro-Ordoñez, J.F.; Montoya, O.D.; Giral-Ramírez, D.A. Optimal Integration of Photovoltaic Sources in Distribution Networks for Daily Energy Losses Minimization Using the Vortex Search Algorithm. Appl. Sci. 2021, 11, 4418. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grisales-Noreña, L.F.; Alvarado-Barrios, L.; Arias-Londoño, A.; Álvarez-Arroyo, C. Efficient Reduction in the Annual Investment Costs in AC Distribution Networks via Optimal Integration of Solar PV Sources Using the Newton Metaheuristic Algorithm. Appl. Sci. 2021, 11, 1525. [Google Scholar] [CrossRef]
- Ayodele, T.; Ogunjuyigbe, A.; Akinola, O. Optimal location, sizing, and appropriate technology selection of distributed generators for minimizing power loss using genetic algorithm. J. Renew. Energy 2015, 2015, 832917. [Google Scholar] [CrossRef] [Green Version]
- Montoya, O.D.; Grisales-Noreña, L.F.; Perea-Moreno, A.J. Optimal Investments in PV Sources for Grid-Connected Distribution Networks: An Application of the Discrete–Continuous Genetic Algorithm. Sustainability 2021, 13, 3633. [Google Scholar] [CrossRef]
- Moradi, M.H.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar] [CrossRef]
- Mohanty, B.; Tripathy, S. A teaching learning based optimization technique for optimal location and size of DG in distribution network. J. Electr. Syst. Inform. Technol. 2016, 3, 33–44. [Google Scholar] [CrossRef] [Green Version]
- Grisales-Noreña, L.F.; Gonzalez Montoya, D.; Ramos-Paja, C.A. Optimal sizing and location of distributed generators based on PBIL and PSO techniques. Energies 2018, 11, 1018. [Google Scholar] [CrossRef] [Green Version]
- Montoya, O.D.; Molina-Cabrera, A.; Chamorro, H.R.; Alvarado-Barrios, L.; Rivas-Trujillo, E. A Hybrid approach based on SOCP and the discrete version of the SCA for optimal placement and sizing DGs in AC distribution networks. Electronics 2021, 10, 26. [Google Scholar] [CrossRef]
- Raharjo, J.; Adam, K.B.; Priharti, W.; Zein, H.; Hasudungan, J.; Suhartono, E. Optimization of Placement and Sizing on Distributed Generation Using Technique of Smalling Area. In Proceedings of the 2021 IEEE Electrical Power and Energy Conference (EPEC), Toronto, ON, Canada, 20–21 October 2021; pp. 475–479. [Google Scholar]
- Selim, A.; Kamel, S.; Alghamdi, A.S.; Jurado, F. Optimal placement of DGs in distribution system using an improved harris hawks optimizer based on single-and multi-objective approaches. IEEE Access 2020, 8, 52815–52829. [Google Scholar] [CrossRef]
- Kaur, S.; Kumbhar, G.; Sharma, J. A MINLP technique for optimal placement of multiple DG units in distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 609–617. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L. An exact MINLP model for optimal location and sizing of DGs in distribution networks: A general algebraic modeling system approach. Ain Shams Eng. J. 2020, 11, 409–418. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grisales-Noreña, L.F.; Gil-González, W.; Alcalá, G.; Hernandez-Escobedo, Q. Optimal location and sizing of PV sources in DC networks for minimizing greenhouse emissions in diesel generators. Symmetry 2020, 12, 322. [Google Scholar] [CrossRef] [Green Version]
- Radosavljević, J.; Arsić, N.; Milovanović, M.; Ktena, A. Optimal placement and sizing of renewable distributed generation using hybrid metaheuristic algorithm. J. Modern Power Syst. Clean Energy 2020, 8, 499–510. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Grisales-Noreña, L.F.; Perea-Moreno, A.J.; Hernandez-Escobedo, Q. Optimal placement and sizing of wind generators in AC grids considering reactive power capability and wind speed curves. Sustainability 2020, 12, 2983. [Google Scholar] [CrossRef] [Green Version]
- Huy, P.D.; Ramachandaramurthy, V.K.; Yong, J.Y.; Tan, K.M.; Ekanayake, J.B. Optimal placement, sizing and power factor of distributed generation: A comprehensive study spanning from the planning stage to the operation stage. Energy 2020, 195, 117011. [Google Scholar] [CrossRef]
- Gil-González, W.; Garces, A.; Montoya, O.D.; Hernández, J.C. A mixed-integer convex model for the optimal placement and sizing of distributed generators in power distribution networks. Appl. Sci. 2021, 11, 627. [Google Scholar] [CrossRef]
- Elkadeem, M.R.; Elaziz, M.A.; Ullah, Z.; Wang, S.; Sharshir, S.W. Optimal Planning of Renewable Energy-Integrated Distribution System Considering Uncertainties. IEEE Access 2019, 7, 164887–164907. [Google Scholar] [CrossRef]
- Ali, A.; Raisz, D.; Mahmoud, K.; Lehtonen, M. Optimal Placement and Sizing of Uncertain PVs Considering Stochastic Nature of PEVs. IEEE Trans. Sustain. Energy 2020, 11, 1647–1656. [Google Scholar] [CrossRef] [Green Version]
- Khoso, A.H.; Shaikh, M.M.; Hashmani, A.A. A New and Efficient Nonlinear Solver for Load Flow Problems. Eng. Technol. Appl. Sci. Res. 2020, 10, 5851–5856. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, K. Accelerated Computation and Tracking of AC Optimal Power Flow Solutions using GPUs. arXiv 2021, arXiv:2110.06879. [Google Scholar]
- Montoya, O.D.; Gil-González, W. Dynamic active and reactive power compensation in distribution networks with batteries: A day-ahead economic dispatch approach. Comput. Electr. Eng. 2020, 85, 106710. [Google Scholar] [CrossRef]
- Chen, X.; Li, Z.; Wan, W.; Zhu, L.; Shao, Z. A master–slave solving method with adaptive model reformulation technique for water network synthesis using MINLP. Sep. Purif. Technol. 2012, 98, 516–530. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Giral, D.A. On the Matricial Formulation of Iterative Sweep Power Flow for Radial and Meshed Distribution Networks with Guarantee of Convergence. Appl. Sci. 2020, 10, 5802. [Google Scholar] [CrossRef]
- Herrera-Briñez, M.C.; Montoya, O.D.; Alvarado-Barrios, L.; Chamorro, H.R. The Equivalence between Successive Approximations and Matricial Load Flow Formulations. Appl. Sci. 2021, 11, 2905. [Google Scholar] [CrossRef]
- Shen, T.; Li, Y.; Xiang, J. A graph-based power flow method for balanced distribution systems. Energies 2018, 11, 511. [Google Scholar] [CrossRef] [Green Version]
- Lun, T.; Wei, T.; Chang, X.; Shumin, M.; Liang, W.; Xia, Y. Network connectivity identification method based on incidence matrix and branch pointer vector. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 429–433. [Google Scholar]
- Zhang, S.; Yan, Y.; Bao, W.; Guo, S.; Jiang, J.; Ma, M. Network topology identification algorithm based on adjacency matrix. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies-Asia (ISGT-Asia), Auckland, New Zealand, 4–7 December 2017; pp. 1–5. [Google Scholar]
- Simpson-Porco, J.W.; Dörfler, F.; Bullo, F. On resistive networks of constant-power devices. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 811–815. [Google Scholar] [CrossRef] [Green Version]
- Sahoo, R.R.; Ray, M. PSO based test case generation for critical path using improved combined fitness function. J. King Saud Univ.-Comput. Inform. Sci. 2020, 32, 479–490. [Google Scholar] [CrossRef]
- Zhang, X.; Beram, S.M.; Haq, M.A.; Wawale, S.G.; Buttar, A.M. Research on algorithms for control design of human–machine interface system using ML. Int. J. Syst. Assur. Eng. Manag. 2021, 1–8. [Google Scholar] [CrossRef]
- Roshan, R.; Porwal, R.; Sharma, C.M. Review of search based techniques in software testing. Int. J. Comput. Appl. 2012, 51, 42–45. [Google Scholar] [CrossRef]
- Harman, M.; Jia, Y.; Zhang, Y. Achievements, open problems and challenges for search based software testing. In Proceedings of the 2015 IEEE 8th International Conference on Software Testing, Verification and Validation (ICST), Graz, Austria, 13–17 April 2015; pp. 1–12. [Google Scholar]
- Anzola, D.; Castro, J.; Giral, D. Herramienta de simulación para el análisis de flujo óptimo clásico utilizando multiplicadores de Lagrange. Trans. Energy Syst. Eng. Appl. 2021, 2, 1–16. [Google Scholar] [CrossRef]
- Doğan, B.; Ölmez, T. A new metaheuristic for numerical function optimization: Vortex Search algorithm. Inform. Sci. 2015, 293, 125–145. [Google Scholar] [CrossRef]
- Gharehchopogh, F.S.; Maleki, I.; Dizaji, Z.A. Chaotic vortex search algorithm: Metaheuristic algorithm for feature selection. Evol. Intell. 2021, 1–32. [Google Scholar] [CrossRef]
- Sahoo, N.; Prasad, K. A fuzzy genetic approach for network reconfiguration to enhance voltage stability in radial distribution systems. Energy Conver. Manag. 2006, 47, 3288–3306. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Montoya, O.D.; Ramos-Paja, C.A. An energy management system for optimal operation of BSS in DC distributed generation environments based on a parallel PSO algorithm. J. Energy Storage 2020, 29, 101488. [Google Scholar] [CrossRef]
- Castiblanco-Pérez, C.M.; Toro-Rodríguez, D.E.; Montoya, O.D.; Giral-Ramírez, D.A. Optimal Placement and Sizing of D-STATCOM in Radial and Meshed Distribution Networks Using a Discrete-Continuous Version of the Genetic Algorithm. Electronics 2021, 10, 1452. [Google Scholar] [CrossRef]
- Wang, P.; Wang, W.; Xu, D. Optimal sizing of distributed generations in DC microgrids with comprehensive consideration of system operation modes and operation targets. IEEE Access 2018, 6, 31129–31140. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Montoya, O.D.; Ramos-Paja, C.A.; Hernandez-Escobedo, Q.; Perea-Moreno, A.J. Optimal location and sizing of distributed generators in DC Networks using a hybrid method based on parallel PBIL and PSO. Electronics 2020, 9, 1808. [Google Scholar] [CrossRef]
- Monteiro, V.; Monteiro, L.F.C.; Franco, F.L.; Mandrioli, R.; Ricco, M.; Grandi, G.; Afonso, J.L. The Role of Front-End AC/DC Converters in Hybrid AC/DC Smart Homes: Analysis and Experimental Validation. Electronics 2021, 10, 2601. [Google Scholar] [CrossRef]
- Montoya, O.D.; Serra, F.M.; De Angelo, C.H. On the efficiency in electrical networks with AC and DC operation technologies: A comparative study at the distribution stage. Electronics 2020, 9, 1352. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 0.1390 | US$/kWh | T | 365 | días | |
| 10 | % | 20 | años | ||
| 1 | h | 2 | % | ||
| 1036.49 | US$/kWp | 0.0019 | US$/kWh | ||
| 3 | - | % | |||
| 0 | kW | 2400 | kW | ||
| US$/V | US$/V | ||||
| US$/W | US$/A |
| Method | Site and Size (Node, MVAr) | (US$/year) | (US$/year) | (US$/year) |
|---|---|---|---|---|
| Bench. Case | - | 3,700,455.38 | 3,700,455.38 | 0 |
| BONMIN | 2,701,824.14 | 2,233,247.50 | 468,576.64 | |
| DCCBGA | 2,699,932.29 | 2,240,724.98 | 459,207.31 | |
| DCVSA | 2,699,761.71 | 2,238,872.09 | 460,889.62 |
| Method | Best (US$/year) | Mean (US$/year) | Worst (US$/year) | SD (US$/year) | Avg. Time (s) |
|---|---|---|---|---|---|
| BONMIN | 2,701,824.14 | 2,701,824.14 | 2,701,824.14 | 0 | 3.64 |
| DCCBGA | 2,699,932.29 | 2,702,178.35 | 2,705,870.99 | 1221.67 | 5.30 |
| DCVSA | 2,699,761.71 | 2,701,911.72 | 2,705,353.76 | 1154.08 | 170.23 |
| Method | Site and Size (Node, MVAr) | (US$/year) | (US$/year) | (US$/year) |
|---|---|---|---|---|
| Bench. Case | - | 3,878,199.93 | 3,878,199.93 | 0 |
| DCCBGA | 2,825,783.32 | 2,345,138.38 | 480,644.95 | |
| DCVSA | 2,825,261.56 | 2,341,670.47 | 483,591.08 |
| Method | Best (US$/year) | Mean (US$/year) | Worst (US$/year) | SD (US$/year) | Avg. Time (s) |
|---|---|---|---|---|---|
| DCCBGA | 2,825,783.32 | 2,829,498.36 | 2,844,469.50 | 2827.18 | 22.36 |
| DCVSA | 2,825,261.56 | 2,829,039.72 | 2,834,150.92 | 2666.56 | 887.64 |
| Method | Site and Size (Node, MVAr) | (US$/year) | (US$/year) | (US$/year) |
|---|---|---|---|---|
| Bench. Case | - | 3,644,043.01 | 3,644,043.01 | 0 |
| DCVSA | 2,662,425.32 | 2,209,300.38 | 453,124.93 |
| Method | Site and Size (Node, MVAr) | (US$/year) | (US$/year) | (US$/year) |
|---|---|---|---|---|
| Bench. Case | - | 3,817,420.38 | 3,817,420.38 | 0 |
| DCVSA | 2,785,538.58 | 2,314,281.30 | 471,257.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortés-Caicedo, B.; Molina-Martin, F.; Grisales-Noreña, L.F.; Montoya, O.D.; Hernández, J.C. Optimal Design of PV Systems in Electrical Distribution Networks by Minimizing the Annual Equivalent Operative Costs through the Discrete-Continuous Vortex Search Algorithm. Sensors 2022, 22, 851. https://doi.org/10.3390/s22030851
Cortés-Caicedo B, Molina-Martin F, Grisales-Noreña LF, Montoya OD, Hernández JC. Optimal Design of PV Systems in Electrical Distribution Networks by Minimizing the Annual Equivalent Operative Costs through the Discrete-Continuous Vortex Search Algorithm. Sensors. 2022; 22(3):851. https://doi.org/10.3390/s22030851
Chicago/Turabian StyleCortés-Caicedo, Brandon, Federico Molina-Martin, Luis Fernando Grisales-Noreña, Oscar Danilo Montoya, and Jesus C. Hernández. 2022. "Optimal Design of PV Systems in Electrical Distribution Networks by Minimizing the Annual Equivalent Operative Costs through the Discrete-Continuous Vortex Search Algorithm" Sensors 22, no. 3: 851. https://doi.org/10.3390/s22030851
APA StyleCortés-Caicedo, B., Molina-Martin, F., Grisales-Noreña, L. F., Montoya, O. D., & Hernández, J. C. (2022). Optimal Design of PV Systems in Electrical Distribution Networks by Minimizing the Annual Equivalent Operative Costs through the Discrete-Continuous Vortex Search Algorithm. Sensors, 22(3), 851. https://doi.org/10.3390/s22030851