1. Introduction
The performance of antenna arrays regarding low side lobe level (SLL) and high directivity, at the same time that there is a far field depression on a certain range of their radiation pattern, represents a very interesting concern on antenna array designs with impact not only on radar [
1] and space applications [
2], but also in the new design strategies for the future 5G communication deployment [
3,
4], where options such as metamaterial-based antenna designs are becoming of high interest in recent literature [
5]. In this same framework, but concerning channel coding design, low density parity check (LDPC) coding is attracting great attention for improving transmission reliability [
6,
7].
Nowadays, suppressing power in precise angular regions of the radiation pattern of high-performance antennas still represents a challenge for the antenna community. In such a way, to have control over these above-mentioned parameters by altering the element excitations and configuration, results in a complex problem with a variety of approaches [
8,
9,
10]. Numerical optimization methods are commonly used in order to find the appropriate solution with the desired characteristics without extensively checking all the possibilities in the solution space.
Array thinning is a technique for the design of antenna arrays, based on removing (or turning off) some elements of an array without significantly changing its beamwidth [
8] (p. 92). Consequently, as is well-known, the directivity of the array will be directly related to the area of illumination of the aperture, therefore, a reduction in a fraction of the level at the filled case is expected, by means of the elements removed. In such a case, it may be possible to exploit this strategy to build moderate high directive arrays. In this framework, after analyzing the different possibilities regarding the cost savings of complex power divider networks, uniform illumination represents a potentially good alternative for feeding these solutions. Therefore, by restricting the excitation possibilities from a continuous problem to a binary one, the number of solutions is decreased to a finite combination of zeros and ones.
Therefore, when analyzing the literature, it can be seen that extensive studies lowering the SLL of the pattern while maintaining a high directivity in thinned arrays have been developed. For instance, examples of using genetic algorithms (GA) [
11,
12], fast Fourier transform techniques (FFT) [
13], ant colony optimization (ACO) [
14], differential algorithm (DA) [
15], pattern search algorithms (PS) [
16], and biogeography-based optimization (BS) [
17] correspond to interesting approaches included within the literature.
At the same time, as has already been mentioned, avoiding interference with a receiving signal by suppressing the radiation pattern in a certain direction or range is also of great interest. Several approaches to this optimization problem have also been addressed in the literature from achieving a certain region of the radiation pattern under a desired level by altering the thinned pattern of the array [
18] to using optimization algorithms in order to minimize the value of the radiation pattern in a certain direction, where examples based on GA [
19] or the whale optimization algorithm (WO) [
20] by altering the excitation amplitudes and phases or the interelement spacing can be reported.
On the other hand, the placement of deep, analytic, nulls of the radiation pattern is a very interesting approach since it represents a more accurate method of guaranteeing the presence of a null position on the radiation pattern. Examples of works achieving this placement via the control of the interelement spacing using particle swarm optimization (PSO) [
21] can be highlighted. Alternatively, methods of controlling nulls through formulations involving changes in amplitude and phase of each element in the array [
22,
23] can be reported.
In the present work, thinned uniform arrays are proposed to maintain low cost and ease of implementation of the feeding network. To this aim, the use of the seminal work of Schelkunoff [
24], in order to represent the roots of the array as in [
25], is proposed to discern between the deep analytical nulls and the filled ones. Therefore, we can optimize our pattern by minimizing the distance from a desired deep null to the closest one from our pattern lying on the unit circle, while maintaining a high directivity and low SLL with the simulated annealing algorithm (SA). To the best knowledge of the authors, none of the previous methodologies described in the literature have simultaneously dealt with deep null fixing and array thinning in array pattern synthesis.
3. Results
In the following, all the described examples are based on linear and planar arrays with interelement spacings of , and regarding the optimization stage, coefficients of the cost function implemented to obtain the optimized values in each case were . The values of these coefficients have been set after tuning of the parameters to obtain the results reported in this work.
3.1. Fixing One Null
In order to study the variation in the SLL, an optimized array achieving the lowest SLL and maximizing directivity, without fixing any nulling direction, was defined as the reference. After this, a sweep was made, fixing one null every from to keeping the directivity to the one of the reference array. This process has been conducted for two different sized arrays: one with 40 elements and another with 80 elements.
3.1.1. 40-Element Linear Arrays
The optimized reference array, calculated without fixing any nulls, resulted in a SLL of with a normalized peak directivity of 0.9 (which corresponds to dB and 36 elements turned on).
In the sweep, all the obtained arrays were able to fix the same desired directivity as the reference array. The distance between the desired nulling direction and the achieved one, for every calculated direction, is shown in
Figure 4a. The SLL variation with the one achieved in the reference array is reported in
Figure 4b.
The average distance between the desired null and the obtained one was
with a standard deviation of
The average difference between the obtained
and the reference one was
with a standard deviation of
The high deviations obtained for cases near the edge of the array pattern (
) report serious difficulties in fixing the angular positions of the nulls and lowering the
due to the last element of the array always being on, as explained in
Section 2.4. Thus, it can be noted how fixing nulls near the edge of the radiation pattern, guaranteeing the same directivity and number of elements, which leads to a null filling of worst performance. On the other hand, fixing nulls near the central region of the pattern is also difficult due to the vicinity to the main beam. Therefore, we restricted this analysis to a more realistic range from
to
as the average distance between the desired null and the obtained one was
with a standard deviation of
, and the average difference between the obtained
and the reference one was
with a standard deviation of
3.1.2. 80-Element Linear Array
The optimized reference array, calculated without fixing any nulls, presents a SLL of and a normalized peak directivity of 0.83 (which corresponds to dB and 66 elements turned on).
In the sweep, all the obtained arrays were able to fix the same desired directivity as the reference array. The distance between the desired nulling direction and the achieved one, for every calculated direction is shown in
Figure 5a. The SLL variation with the one achieved in the reference array is reported in
Figure 5b.
The average distance between the desired null and the obtained one was with a standard deviation of The average difference between the obtained SLL and the reference one was with a standard deviation of As for the previous example, if we restrict the calculation to the best working region of the sweep (which in this case was from to ), now the average distance between the desired null and the obtained one is with a standard deviation of and the average difference between the obtained SLL and the reference one is with a standard deviation of
3.2. Fixing Multiple Nulls
By introducing multiple terms in the sum of the nulling directions cost, we can fix more than one deep null in our pattern. Four examples are shown in
Figure 6, fixing two and three nulling directions, close together, and with a wide separation between each desired deep null.
Examples shown in
Figure 6a,b consist of 40-element arrays. In the first example, nulls at positions
and
were desired, and the closest achieved nulling directions were
and
, respectively. The normalized peak directivity of the resulting pattern was
(which corresponds to
dB and 30 elements turned on) and the SLL was −
In the example from
Figure 6b, the desired nulling directions were
and
, and deep nulls at
and
were achieved, with a normalized peak directivity of
(which corresponds to
and 30 elements turned on), resulting in a SLL of −
Figure 6c,d correspond to 60-element arrays with three desired nulling directions. In the example shown in
Figure 6c, deep nulls at angles of
,
, and
were desired, and the closest obtained nulling directions were
,
and
, with a normalized peak directivity of
(which corresponds to
and 44 elements turned on) and a SLL of −11.24 dB. In the pattern from
Figure 6d, three separated deep nulls at
,
, and
were desired, and nulls at angles of
,
, and
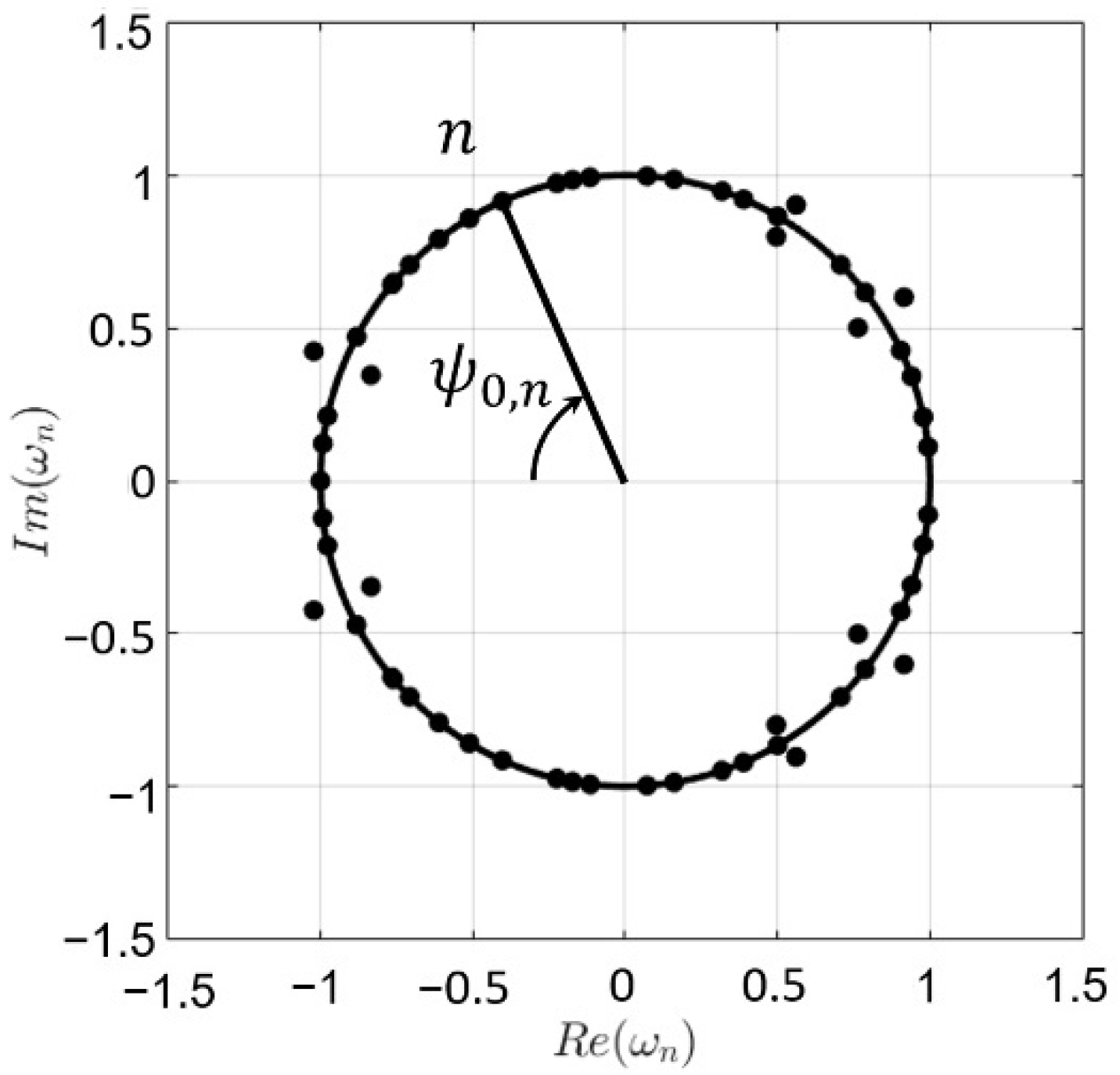
were achieved. A graphical representation of the roots of the pattern with the Schelkunoff unit circle, highlighting the ones corresponding to the fixed deep nulls lying on the unit circle, is reported in
Figure 7. The normalized peak directivity in this case was
(which corresponds to 16.97 dB and 50 elements turned on) and the SLL = −17.84 dB.
The roots of the radiation pattern from
Figure 6d, shown in
Figure 7, are either exactly on the Schelkunoff unit circle, or are given by pairs, with the same
, one inside and one outside. The study made in [
30] addressed this, concluding on the existence of a multiplicity of solutions, corresponding to different relative excitation vectors of the array, resulting in the same contributions to the amplitude of the radiation pattern. Although this is applicable in our case, it has been checked that the case here reported is the only one resulting in real, symmetric values, consisting of ones and zeros for the relative excitation vector.
3.3. Binary GA Comparison
To develop a crosscheck and comparing the performance of the present method, a binary GA algorithm [
11,
31] has been introduced in the same optimization strategy including the same null fixing method and cost function (6). Both optimizations were encoded in MATLAB R2021b by Mathworks Inc. (Natick, Apple Hill Campus, MA, USA) and all calculations were performed in a personal computer with an AMD A10-9600P processor running at 2.40 GHz and 12 GB of RAM.
The obtained antenna arrays with the GA presented similar deviations from the desired characteristics of the pattern in all the mentioned examples, with a population size of 350, single-point crossover with a crossover fraction of , roulette selection, mutation of bits with a probability of and one elite individual per generation.
Although this method a priori represents the most natural way of facing thinned linear arrays of uniform relative excitations, due to its binary nature, it results in a considerable time difference with the hybrid SA. Similar running times can sometimes be achieved for small arrays up to 40 elements in size, as shown in
Table 1, but our experimentation showed a great increase in the difference for arrays with more elements, up to a factor of approximately nine times the running time of the SA for a 200-element array.
3.4. Planar Arrays with Separable Distribution
Extending the result obtained for two 40-element linear arrays, each one optimized by the method here reported fixing two different nulling directions, so we calculated the relative excitation pattern for a planar array with a rectangular grid and boundary with a separable distribution.
For the
axis (
), an array with desired nulling directions in
and
was calculated, achieving deep nulls at
and
. The normalized peak directivity of this pattern was
(which corresponds to
dB and 34 turned on) and the
was
dB. For the
axis (
), an array with desired nulling directions in
and
was synthesized, obtaining deep nulls at
and
with a normalized peak directivity of
(which corresponds to
dB and 36 turned on) and a SLL of
dB. Both relative excitation vectors for the arrays are shown in
Table 2.
The corresponding relative excitation pattern for the planar array generated by the separable distribution procedure is shown in
Figure 8a, while its corresponding normalized far-field radiation pattern is shown in
Figure 8b.
We must highlight the fact that our linear arrays are optimized lying on the
axis, so when we produce the planar array on the
plane, the null positions of our linear patterns are shifted
in the
coordinate, aside from one of them (the one chosen to be in the
axis) turned
around the
axis, in the
coordinate. The radiation diagram shown in
Figure 8b uses the coordinate system
and
, so with the described shifts resulting from the movement of the linear arrays, our deep nulls are now at
,
,
and
, where the plus and minus sign comes from the symmetry of the linear array patterns. The resulting far field pattern from the planar array presents a SLL of
dB, and a normalized peak directivity of
(which corresponds to a peak directivity of
dB and
elements turned on), where the peak directivity of the uniformly excited planar array of the same size was used in the normalization.
4. Discussion
In the present work, an innovative method for fixing deep nulls in radiation patterns of symmetrical linear arrays based on the hybrid SA global optimization algorithm was implemented. This method is able to synthesize required radiation patterns restricting the possible relative excitation values for the arrays to a binary possibility of zero or one, facilitating the feeding network implementation. To the best knowledge of the authors, this approach represents the first achievement of simultaneously including both array thinning and deep null fixing in the array pattern synthesis framework.
The algorithm shows a great ability for fixing a single nulling direction in a big range of the pattern, maintaining a fixed desired directivity, while keeping the SLL close to the one from the optimized array without any fixed deep nulls. In the case of the 40-element array, an average deviation of from the desired nulling direction was achieved in the range , and the average difference between the obtained SLL and the reference one was . For the 80-element array, an average deviation of from the desired nulling direction was achieved in the range , and the average difference between the obtained SLL and the reference one in this case was
In order to show the flexibility of the procedure, examples with multiple nulling directions have been also analyzed, both in angles close together and presenting a large separation between them. In such a case, it is important to highlight the increased difficulty for each added deep null, resulting in worst fixing precision or higher of the pattern produced by the method.
Regarding computational costs, it can be concluded that running time differences between the present methodology and GA-based alternatives increase considerably with the number of elements of the arrays.
An extension for fixing certain nulling directions in planar arrays, while keeping the relative excitations of the antenna array elements binary (zeros and ones) was implemented by using separable distributions, obtaining the desired radiation patterns with fixed nulls in the and planes. This method leads to the desired nulling patterns in the mentioned planes, but reduced SLL elsewhere with a consequent beam broadening and reduced directivity. Separable distributions are also strictly only applicable to planar arrays with rectangular grids and boundaries, limiting their use.
As future developments for the strategy regarding linear array approaches, studies involving non-symmetrical solutions are under consideration. To this aim, it is important to highlight that for a sum pattern, as its amplitude distribution is always symmetrical, an asymmetrical phase distribution becomes mandatory in addressing an asymmetrical nature of the pattern [
26] (p. 167). Therefore, the envisaged idea is based on the introduction of an asymmetrical phase distribution within the present methodology to improve its flexibility.
Additionally, an alternative planar extension also under consideration is based on the collapsed distributions paradigm [
29,
32]. More precisely, the implementation of relative excitations for the planar array with
and
as boundary conditions can be proposed as a working hypothesis. In such a way, a two
bit basis for the feeding network could be managed: one bit regarding relative amplitudes (0 and 1), and another bit for relative phases (
and
) of the active elements. A second optimization stage is here proposed, after the generation of the linear arrays, looking for the individual relative excitation values for each element of the planar array in order to achieve, as collapsed distributions at certain angles, the linear arrays from the first optimization. In such a way, the invocation of the principle of collapsed distributions will guarantee the implementation of a methodology to project relative excitations of 1 or 0 for the equivalent linear arrays as required.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}