
Computer Vision-Based Classification of Flow Regime and Vapor Quality in Vertical Two-Phase Flow


Abstract
:1. Introduction
- The development of a high-performing CNN-based flow regime classifier for vertical flow, which is applicable to a wide range of flow regimes (with some being visually similar); the classifier is trained using a large dataset, one where the only inputs are images captured by a camera.
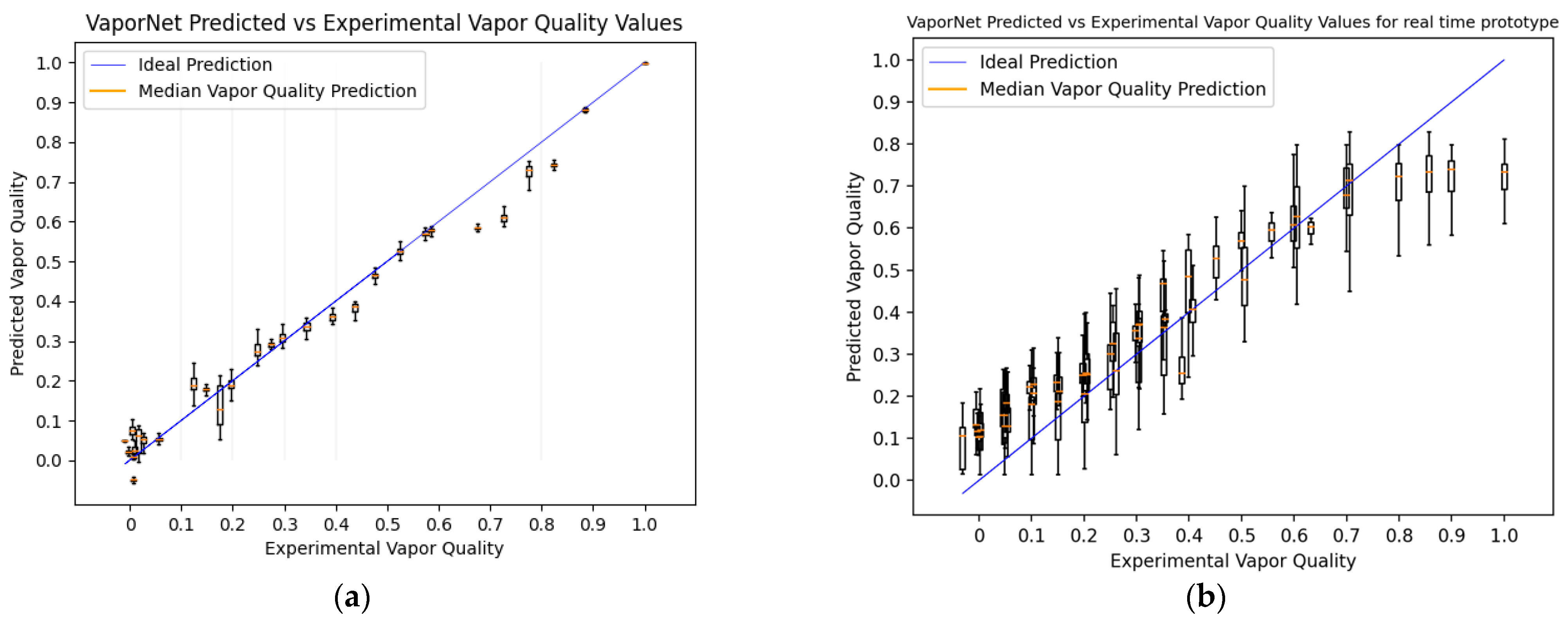
- The detailing of the first published deep learning and image-based method (with mass flow rate and pressure also included as inputs) for vapor quality estimation.
- The fact that these methods make use of only camera images (and static flow parameters for vapor quality estimation) leads to them being more accessible, as they require less technical or domain-specific knowledge for deployment.
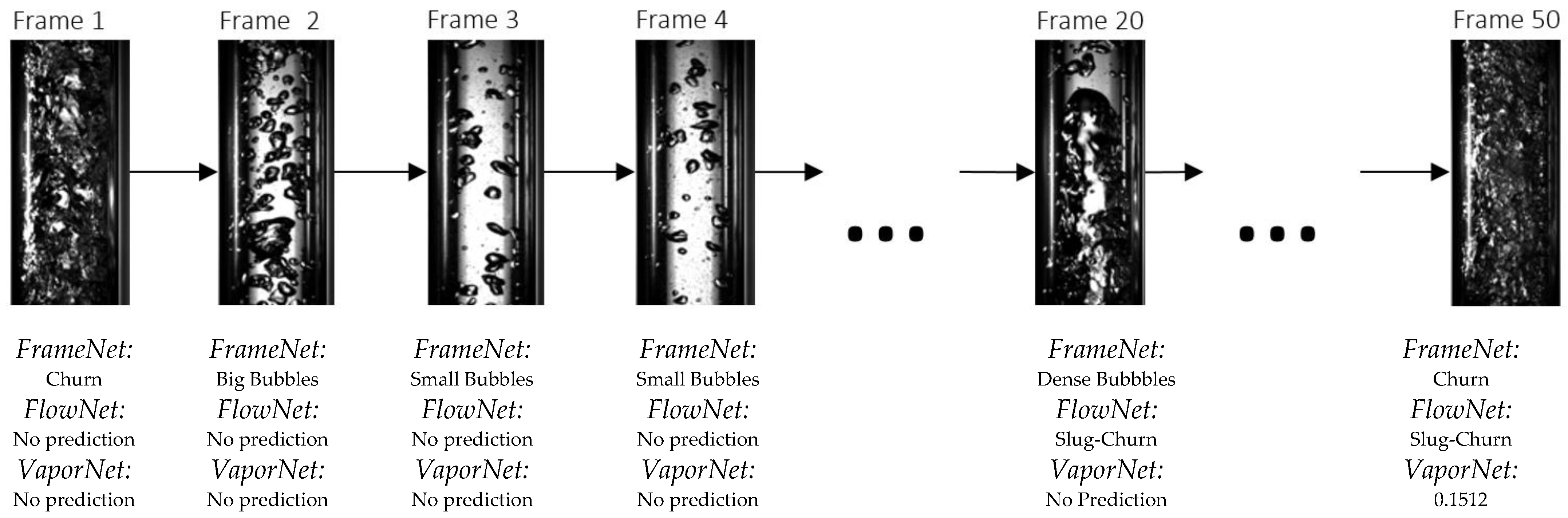
- The use of only camera images also allows for the real-time deployment of these classifiers. The real-time deployment (at a prototype level) of a flow regime and vapor quality classifier is a novel achievement that is presented in this paper. These real-time implementations are advantageous in that they allow the above models to be utilized within a control feedback loop.
- The LSTM’s use of image sequences to account for temporal flow characteristics will be shown to be useful in image-based two-phase flow studies.
- By utilizing image features extracted by a CNN network for these distinct tasks, this method is shown to be a viable alternative to manual image feature extraction in analyzing two-phase flow.
2. Materials and Methods
2.1. Experimental Setup
2.1.1. Two-Phase Flow Data Generation
2.1.2. Image Acquisition for Offline Testing and Model Training
2.1.3. Laboratory Prototype and Real-Time Image Acquisition
2.2. Model Architecture
2.2.1. Image Feature Extraction
2.2.2. Recurrent Layer
2.2.3. Classification Layer
2.3. Class Definitions and Data Preparation
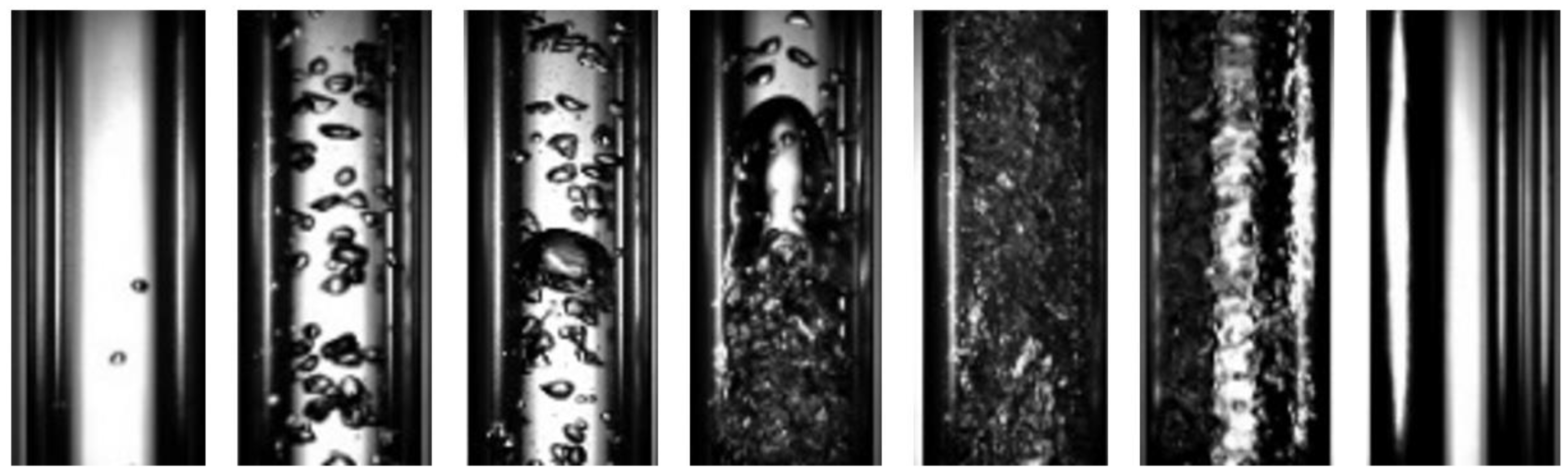
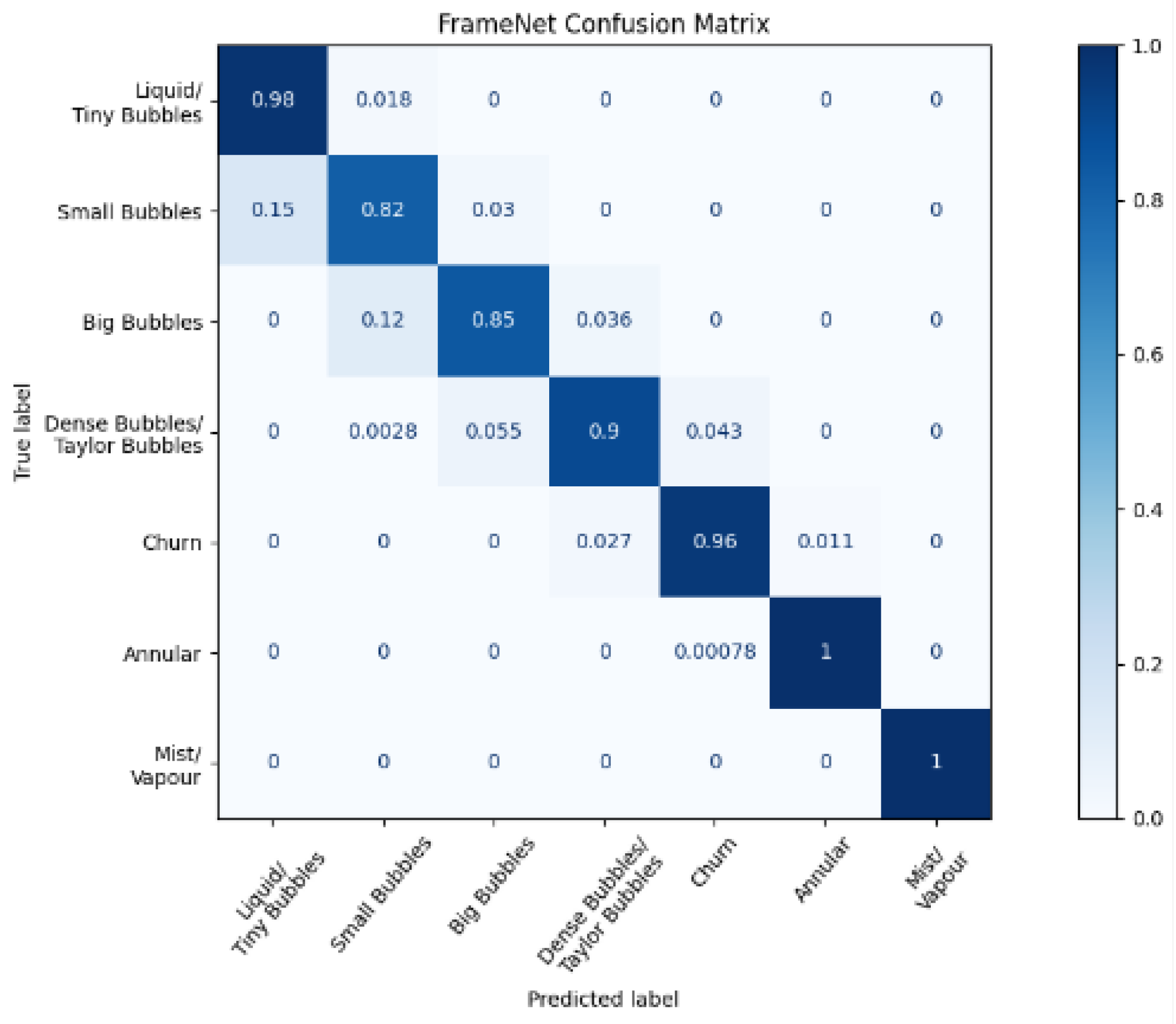
- Liquid/tiny bubbles: A small number of tiny, discrete gas bubbles flow in a continuous liquid phase.
- Small bubbles: A few small, discrete gas bubbles flow in a continuous liquid phase.
- Big bubbles: A few small, discrete gas bubbles, with some large spherical bubbles and slug-like bubbles within the fluid, flow in a continuous liquid phase.
- Dense bubbles/Taylor bubbles: Many small- to medium-sized discrete bubbles flow in a continuous liquid phase. The bubbles are distributed more consistently and densely across the image, with more than half the viewing section of the tube being taken up by bubbles. Taylor bubbles are also found in this frame class.
- Churn: A mix of gas and liquid that flows chaotically, with no visible bubbles.
- Annular: A gas core forms from the center of the pipe. A wavy liquid film flows along the walls of the pipe, and liquid droplets are dispersed within the gas core.
- Mist/vapor: No liquid is visible, as a continuous gas phase flows through the channel.
2.4. Model Training
3. Results
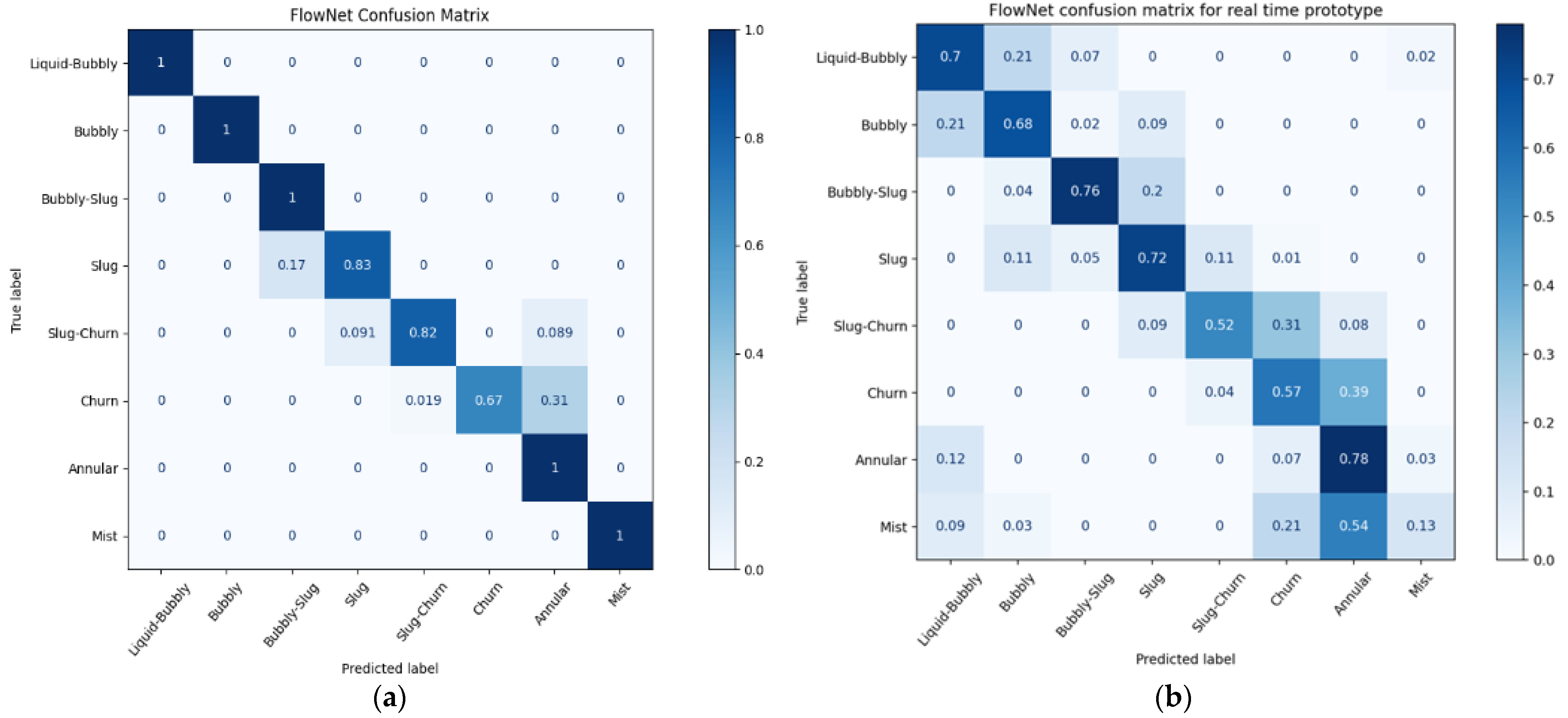
3.1. Model Performance
3.2. Real-Time Performance
4. Discussion
4.1. Offline Results
4.2. Real-Time Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Holland, F.; Bragg, R. Gas–liquid two-phase flow. In Fluid Flow for Chemical Engineers, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 1995; pp. 219–267. ISBN 9780080523699. [Google Scholar]
- Ghajar, J.; Bhagwat, S.M. Flow Patterns, Void Fraction and Pressure Drop in Gas-Liquid Two Phase Flow at Different Pipe Orientations. In Frontiers and Progress in Multiphase Flow 1; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; pp. 157–212. ISBN 9783030416256. [Google Scholar]
- Schmid, D.; Verlaat, B.; Petagna, P.; Revellin, R.; Schiffmann, J. Flow pattern observations and flow pattern map for adiabatic two-phase flow of carbon dioxide in vertical upward and downward direction. Exp. Therm. Fluid Sci. 2022, 131, 110526. [Google Scholar] [CrossRef]
- Quitiaquez, W.; Herrera, A.; Isaza-Roldán, C.; Mena, M.; Nieto-Londoño, C.; Toapanta-Ramos, F. Numerical analysis of flow patterns maps in horizontal pipes with variation of inclination angles in a collector/evaporator of a DX-SAHP. Mater. Today Proc. 2022, 49, 194–201. [Google Scholar] [CrossRef]
- Song, Q.; Chen, G.; Yang, Z.; Wang, H.; Gong, M. New adiabatic and condensation two-phase flow pattern maps of R14 in a horizontal tube. Int. J. Heat Mass Transf. 2018, 127, 910–924. [Google Scholar] [CrossRef]
- Abuaf, N.; Jones, O., Jr.; Zimmer, G. Optical probe for local void fraction and interface velocity measurements. Rev. Sci. Instrum. 1978, 49, 1090–1094. [Google Scholar] [CrossRef] [PubMed]
- Oriol, J.; Leclerc, J.P.; Jallut, C.; Tochon, P.; Clement, P. Characterization of the two-phase flow regimes and liquid dispersion in horizontal and vertical tubes by using coloured tracer and non-intrusive optical detector. Chem. Eng. Sci. 2008, 63, 24–34. [Google Scholar] [CrossRef]
- Manera, A.; Ozar, B.; Paranjape, S.; Ishii, M.; Prasser, H.-M. Comparison between wire-mesh sensors and conductive needle-probes for measurements of two-phase flow parameters. Nucl. Eng. Des. 2009, 239, 1718–1724. [Google Scholar] [CrossRef]
- Ghosh, S.; Pratihar, D.; Maiti, B.; Das, P. Identification of flow regimes using conductivity probe signals and neural networks for counter-current gas-liquid two-phase flow. Chem. Eng. Sci. 2012, 84, 417–436. [Google Scholar] [CrossRef]
- Prasser, H.M.; Scholz, D.; Zippe, C. Bubble size measurement using wire-mesh sensors. Flow Meas. Instrum. 2001, 4, 299–312. [Google Scholar] [CrossRef]
- Banowski, M.; Patmonoaji, A.; Lucas, D.; Hampel, U. A novel fuzzy-logic based method for determination of individual bubble velocity and size from dual-plane ultrafast X-ray tomography data of two-phase flow. Int. J. Multiph. Flow 2017, 96, 144–160. [Google Scholar] [CrossRef] [Green Version]
- Azizi, S.; Yadav, A.; Lau, Y.M.; Hampel, U.; Roy, S.; Schubert, M. On the experimental investigation of gas-liquid flow in bubble columns using ultrafast X-ray tomography and radioactive particle tracking. Chem. Eng. Sci. 2017, 170, 320–331. [Google Scholar] [CrossRef]
- Hanus, R.; Zych, M.; Kusy, M.; Jaszczur, M.; Petryka, L. Identification of liquid-gas flow regime in a pipeline using gamma-ray absorption technique and computational intelligence methods. Flow Meas. Instrum. 2018, 60, 17–23. [Google Scholar] [CrossRef]
- Murai, Y.; Tasaka, Y.; Nambu, Y.; Takeda, S.Y.; Gonzalez, A.R. Ultrasonic detection of moving interfaces in gas–liquid two-phase flow. Flow Meas. Instrum. 2010, 21, 356–366. [Google Scholar] [CrossRef]
- Duan, Q.; Peng, J.; Wang, L.; Yan, Y. Measurement of the void fraction of gas-liquid two-phase CO2 flow using laser attenuation techniques. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference: Discovering New Horizons in Instrumentation and Measurement, Houston, TX, USA, 14–17 May 2018. [Google Scholar] [CrossRef]
- Kashdan, J.; Shrimpton, J.; Whybrew, A. Two-Phase Flow Characterization by Automated Digital Image Analysis. Part 1: Fundamental Principles and Calibration of the Technique. Part. Part. Syst. Charact. 2003, 20, 387–397. [Google Scholar] [CrossRef]
- Ulbrich, R.; Krótkiewicz, M.; Szmolke, N.; Anweiler, S.; Masiukiewicz, M.; Zajac, D. Recognition of two-phase flow patterns with the use of dynamic image analysis. Proc. Inst. Mech. Eng. Part E-J. Process Mech. Eng. 2002, 216, 227–233. [Google Scholar] [CrossRef]
- Chakraborty, S.; Das, P.K. A unique methodology of objective regime classification for two phase flow based on the intensity of digital images. Exp. Therm. Fluid Sci. 2018, 99, 537–546. [Google Scholar] [CrossRef]
- Shanthi, C.; Pappa, N.; Suganya, J.A. Digital Image Processing Based Flow Regime Identification of Gas/Liquid Two - Phase Flow. IFAC Proc. Vol. 2013, 46, 409–414. [Google Scholar] [CrossRef]
- Yunlong, Z.; Fei, C.; Bin, S. Identification Method of Gas-Liquid Two-phase Flow Regime Based on Image Multi-feature Fusion and Support Vector Machine. Chin. J. Chem. Eng. 2008, 16, 832–840. [Google Scholar] [CrossRef]
- Sunde, C.; Avdic, S.; Pázsit, I. Classification of two-phase flow regimes via image analysis and a neuro-wavelet approach. Prog. Nucl. Energy 2005, 46, 348–358. [Google Scholar] [CrossRef]
- Liu, L.; Bai, B. Flow regime identification of swirling gas-liquid flow with image processing technique and neural networks. Chem. Eng. Sci. 2019, 199, 588–601. [Google Scholar] [CrossRef]
- Almalki, N.; Ahmed, W. Prediction of Two-Phase Flow Patterns Using Machine Learning Algorithms. In Proceedings of the 7th International Conference on Fluid Flow, Heat and Mass Transfer (FFHMT’20), Virtual Conference, Niagara Falls, ON, Canada, 15–17 November 2020. [Google Scholar] [CrossRef]
- Ezzatabadipour, M.; Singh, P.; Robinson, M.; Guillen, P.; Torres, C. Deep Learning as a Tool to Predict Flow Patterns in Two-Phase Flow. In Proceedings of the Workshop on Data Mining for Oil and Gas (DM4OG), Houston, TX, USA, 27–29 April 2017; Jorge, A., Larrazabal, G., Guillen, P., Lopes, R.L., Eds.; Self Published: Houston, TX, USA, 2017. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Poletaev, E.; Pervunin, K.S.; Tokarev, M.P. Artificial neural network for bubbles pattern recognition on the images. J. Phys. Conf. Ser. 2016, 754, 072002. [Google Scholar] [CrossRef] [Green Version]
- Haas, T.; Schubert, C.; Eickhoff, M.; Pfeifer, H. BubCNN: Bubble detection using Faster RCNN and shape regression network. Chem. Eng. Sci. 2020, 216, 115467. [Google Scholar] [CrossRef]
- Gao, Z.; Hou, L.; Dang, W.; Wang, X.; Hong, X.; Yang, X.; Chen, G. Multitask-based Temporal-Channelwise CNN for Parameter Prediction of Two-phase Flows. IEEE Trans. Ind. Inform. 2020, 17, 6329–6336. [Google Scholar] [CrossRef]
- Brantson, E.T.; Abdulkadir, M.; Akwensi, P.; Osei, H.; Appiah, T.; Assie, K.; Samuel, S. Gas-liquid vertical pipe flow patterns convolutional neural network classification using experimental advanced wire mesh sensor images. J. Nat. Gas Sci. Eng. 2022, 99, 104406. [Google Scholar] [CrossRef]
- Du, M.; Yin, H.; Chen, X.; Wang, X. Oil-in-Water Two-Phase Flow Pattern Identification From Experimental Snapshots Using Convolutional Neural Network. IEEE Access 2019, 7, 6219–6225. [Google Scholar] [CrossRef]
- Seal, M.; Abadi, S.N.R.; Mehrabi, M.; Meyer, J. Machine learning classification of in-tube condensation flow patterns using visualization. Int. J. Multiph. Flow 2021, 143, 103755. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Shi, B.; Bai, X.; Yao, C. An End-to-End Trainable Neural Network for Image-based Sequence Recognition. Comput. Vis. Pattern Recognit. 2015, arXiv:1507.05717. [Google Scholar]
- Carrasco-Davis, R.; Cabrera-Vives, G.; Förster, F.; Estévez, P.A.; Huijse, P.; Protopapas, P.; Reyes, I.; Martínez-Palomera, J.; Donoso, C. Deep Learning for Image Sequence Classification of Astronomical Events. Publ. Astron. Soc. Pac. 2019, 131, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Sahu, P.; Yu, D.; Yager, K.; Dasari, M.; Qin, H. In-Operando Tracking and Prediction of Transition in Material System using LSTM. In Proceedings of the 1st International Workshop, Tempe, AZ, USA, 11 June 2018. [Google Scholar] [CrossRef]
- Schmidt, R.M. Recurrent neural networks (rnns): A gentle introduction and overview. arXiv 2019, arXiv:1912.05911. [Google Scholar]
- Hinton, G.; Abdel-rahman, M.G.E. Speech Recognition with Deep Recurrent Neural Networks. Neural Evol. Comput. 2013, arXiv:1303.5778. [Google Scholar]
- Salehinejad, H.; Sankar, S.; Barfett, J.; Colak, E.; Valaee, S. Recent advances in recurrent neural networks. arXiv 2017, arXiv:1801.01078. [Google Scholar]
- Taitel, Y.; Bornea, D.; Dukler, A.E. Modelling flow pattern transitions for steady upward gas-liquid flow in vertical tubes. AIChE J. 1980, 26, 345–354. [Google Scholar] [CrossRef]
- Simard, P.; Steinkraus, D.; Platt, J. Best Practices for Convolutional Neural Networks Applied to Visual Document Analysis. In Proceedings of the 7th International Conference on Document Analysis and Recognition (ICDAR 2003), Edinburgh, Scotland, 3–6 August 2003. [Google Scholar] [CrossRef]
- Wilson, A.C.; Roelofs, R.; Stern, M.; Srebro, N.; Recht, B. The Marginal Value of Adaptive Gradient Methods in Machine Learning. In Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Kingma, P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Advances in Neural Information Processing Systems 32; Neural Information Processing Systems Foundation, Inc. (NIPS): Vancouver, BC, Canada, 2019. [Google Scholar]
- Vanwinckelen, G.; Blockeel, H. On Estimating Model Accuracy with Repeated Cross-Validation. In Proceedings of the BeneLearn 2012: Proceedings of the 21st Belgian-Dutch Conference on Machine Learning, Ghent, Belgium, 24–25 May 2012. Gjem ISBN: 978-94-6197-044-2. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. Model Assessment and Selection. In The Elements of Statistical Learning; Springer: New York, NY, USA, 2009; pp. 241–247. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | FrameNet | FlowNet | VaporNet |
|---|---|---|---|
| Optimizer | SGD | Adam | Adam |
| Learning Rate | 1 × 10−3 | 1 × 10−4 | 1 × 10−4 |
| Batch Size | 10 | 256 | 256 |
| Training Epochs | 30 | 60 | 100 |
| Momentum | 0.9 | Adaptive | Adaptive |
| Fold | FrameNet Accuracy (%) | FlowNet Accuracy (%) | VaporNet RMSE in Vapor Quality Prediction |
|---|---|---|---|
| Fold-1 | 93.0 | 91.5 | 4.8 × 10−2 |
| Fold-2 | 92.5 | 95.4 | 5.2 × 10−2 |
| Fold-3 | 91.0 | 92.5 | 4.4 × 10−2 |
| Fold-4 | 90.6 | 87.4 | 6.1 × 10−2 |
| Fold-5 | 92.3 | 91.8 | 6.4 × 10−2 |
| Mean | 91.9 | 91.7 | 5.5 × 10−2 |
| Standard Deviation | 0.9 | 2.6 | 0.8 × 10−2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kadish, S.; Schmid, D.; Son, J.; Boje, E. Computer Vision-Based Classification of Flow Regime and Vapor Quality in Vertical Two-Phase Flow. Sensors 2022, 22, 996. https://doi.org/10.3390/s22030996
Kadish S, Schmid D, Son J, Boje E. Computer Vision-Based Classification of Flow Regime and Vapor Quality in Vertical Two-Phase Flow. Sensors. 2022; 22(3):996. https://doi.org/10.3390/s22030996
Chicago/Turabian StyleKadish, Shai, David Schmid, Jarryd Son, and Edward Boje. 2022. "Computer Vision-Based Classification of Flow Regime and Vapor Quality in Vertical Two-Phase Flow" Sensors 22, no. 3: 996. https://doi.org/10.3390/s22030996
APA StyleKadish, S., Schmid, D., Son, J., & Boje, E. (2022). Computer Vision-Based Classification of Flow Regime and Vapor Quality in Vertical Two-Phase Flow. Sensors, 22(3), 996. https://doi.org/10.3390/s22030996