Dual-Beam Steerable TMAs Combining AM and PM Switched Time-Modulation



Abstract
:1. Introduction
- The low cost and insertion losses of the array feeding network.
- The easy and precise method for realising electronic beamsteering by simply controlling the on-off switching instants [7].
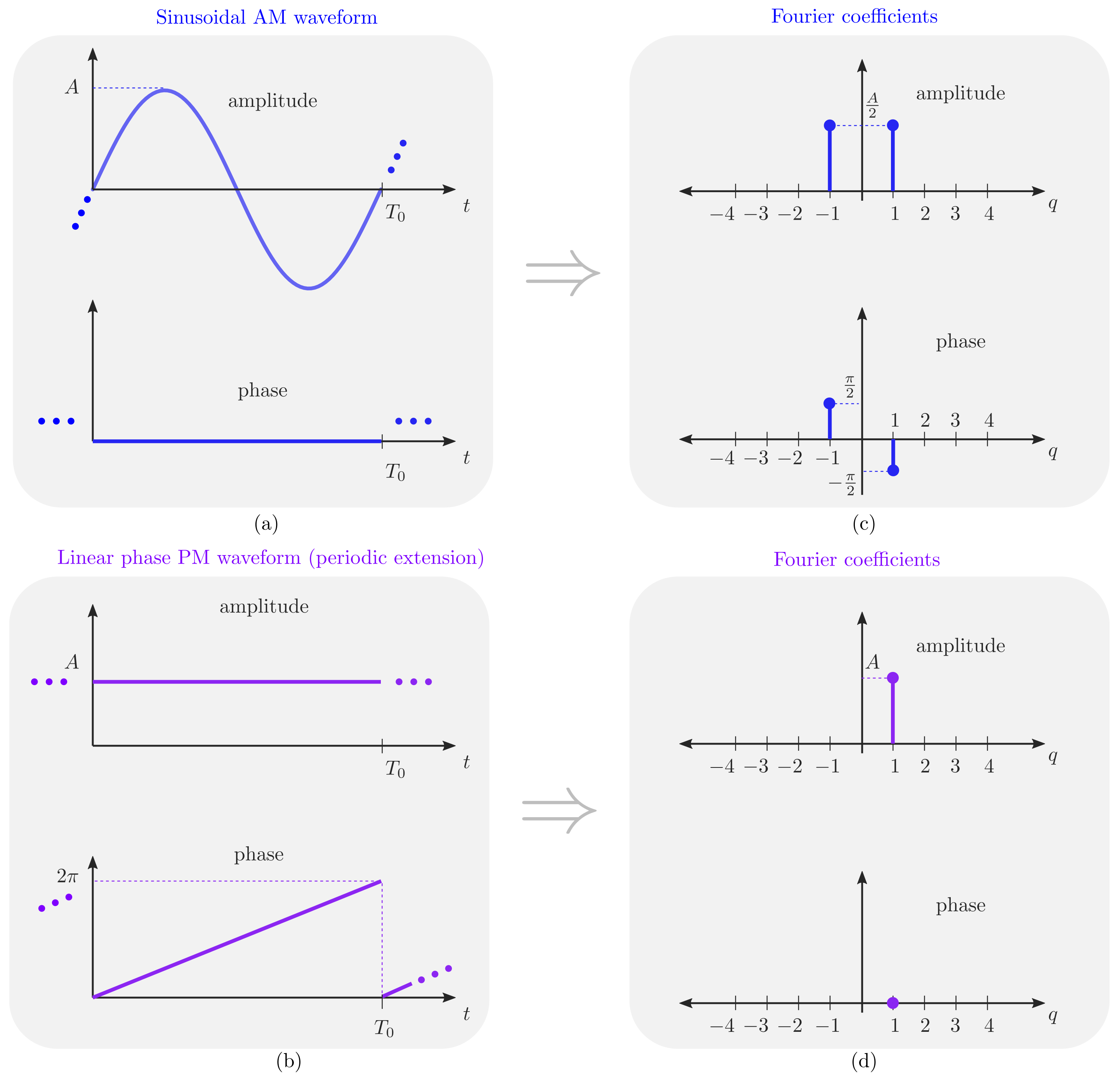
2. AM and Linear-Phase PM Modulation with Switched Networks
2.1. AM and PM Periodic Modulating Signals
2.2. Discretization of the Modulating Signals: Characteristics and Generation
- , →
- , →
- , →
- , →

3. Design of Dual-Beam Steerable TMAs Combining AM and PM BFNs
4. Numerical Simulations
5. Comparison with Existing Dual-Beam Architectures

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Frequency (GHz) | Insertion Loss (dB) | References |
|---|---|---|---|
| 6-bit VPS | S band | [21,22,23] | |
| 2-way splitter/combiner | 1.7–3 (S band) | 0.5 | [24] |
| 3-way splitter/combiner | 1.6–2.8 (S band) | 0.8 | [24] |
| SPDT RF switch | 0.05–26.5 | 0.4 | [23] |
| time delay-line (PCB) | 2.4 ± 0.0025 | 0.06 | [25] |

- Power efficiency takes into account the insertion losses associated with the specific hardware devices employed, , and additionally, in the case of the TMA technology, it also considers the time-modulation radiation efficiency, Equation (11), due to the fact that non-useful harmonics are also radiated, hence wasting power.In view of Figure 8a, the power efficiency of the dual-beam standard phased array feeding network isFor the case of the TMA architecture in Figure 8b, which was thoroughly analyzed in [18], the power efficiency obeys towith dB, whereas (see Figure 8b):beingwhich, by substituting successively the values from Table 3 in Equations (13)–(15), leads toRegarding the antenna feeding network proposed in this article (see Figure 8c), we havewhereand since dB, we have that (Table 3)Note that the proposed antenna feeding network offers the best figure in terms of power efficiency.
- Phase sensitivity. We compare the minimum phase step, , that each steering array architecture is capable of providing. We saw at the beginning of this section that, in the case of a standard phased array (see Figure 8a) with 6-bit VPSs, . The great advantage of TMA architectures (see Figure 8b,c) is that is directly proportional to [18]. By considering the SPDT switches in Table 3, with ns, we achieve (analogously to [18]) a , which is significantly better than that offered by a standard architecture with 6-bit VPSs.
- The hardware complexity analysis is necessarily centered on two elements: the number of SPDT switches and the number of power splitter/combiners employed by the BFN architecture. Note that a b-bit digital phase shifter usually employs SPDT switches [21,22,23]. Thus, the BFN of a standard dual-beam phased array with 6-bit VPSs (see Figure 8a) will have 24 SPDT switches. On the other hand, the dual-beam TMA with AM waveforms shown in Figure 8b requires 9 SPDT switches, whereas the proposed TMA combining AM with PM waveforms (see Figure 8c) uses only 7 SPDT switches. If we now compare the number of power splitter/combiners required by the three architectures, we observe that the TMA architecture with AM waveforms quadruplicates the number of these elements with respect to the other two (i.e., 8 versus 2). Thus, it is concluded that the proposed architecture is objectively the most advantageous in terms of complexity.
- Cost effectiveness. Among all the hardware devices listed in Table 3, the most expensive is clearly the 6-bit VPSs. Therefore, we will analyze the percentage of savings of each TMA architecture with respect to the standard phased array. We can see that the strongest differential aspect of the proposed TMA architecture for WSN applications (see Figure 8c) is the significant cost savings. All quantitative results of the comparative are presented in Table 4.
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AF | array factor |
| AM | amplitude modulation |
| BS | beamsteering |
| BFN | beamforming network |
| DOA | direction of arrival |
| DSB | double sideband |
| PM | phase modulation |
| RF | radio frequency |
| SP4T | single-pole four-throw |
| SP8T | single-pole eight-throw |
| SPDT | single-pole dual-throw |
| SSB | single sideband |
| TMA | time-modulated array |
| VPS | variable phase shifter |
| ULA | uniform linear array |
| WSN | wireless sensor network |
References
- Senouci, M.R.; Mellouk, A. Deploying Wireless Sensor Networks: Theory and Practice; ISTE Press-Elsevier: London, UK, 2016. [Google Scholar]
- Curiac, D.I. Wireless Sensor Network Security Enhancement Using Directional Antennas: State of the Art and Research Challenges. Sensors 2016, 16, 488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- George, R.; Mary, T.A.J. Review on directional antenna for wireless sensor network applications. IET Commun. 2020, 14, 715–722. [Google Scholar] [CrossRef]
- Mottola, L.; Voigt, T.; Picco, G.P. Electronically-switched directional antennas for wireless sensor networks: A full-stack evaluation. In Proceedings of the 2013 IEEE International Conference on Sensing, Communications and Networking (SECON), New Orleans, LA, USA, 24–27 June 2013; pp. 176–184. [Google Scholar] [CrossRef] [Green Version]
- Catarinucci, L.; Guglielmi, S.; Colella, R.; Tarricone, L. Switched-beam antenna for WSN nodes enabling hardware-driven power saving. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems, Warsaw, Poland, 7–10 September 2014; pp. 1079–1086. [Google Scholar] [CrossRef] [Green Version]
- Maneiro-Catoira, R.; Brégains, J.; García-Naya, J.A.; Castedo, L. Time Modulated Arrays: From their Origin to their Utilization in Wireless Communication Systems. Sensors 2017, 17, 590. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Q.; Zhang, J.; Wu, W.; Fang, D. Enhanced Single-Sideband Time-Modulated Phased Array with Lower Sideband Level and Loss. IEEE Trans. Antennas Propag. 2020, 68, 275–286. [Google Scholar] [CrossRef]
- Chen, Q.; Bai, L.; He, C.; Jin, R. On the Harmonic Selection and Performance Verification in Time-Modulated Array-Based Space Division Multiple Access. IEEE Trans. Antennas Propag. 2021, 69, 3244–3256. [Google Scholar] [CrossRef]
- Maneiro Catoira, R.; Brégains, J.; Garcia-Naya, J.A.; Castedo, L.; Rocca, P.; Poli, L. Performance Analysis of Time-Modulated Arrays for the Angle Diversity Reception of Digital Linear Modulated Signals. IEEE J. Sel. Top. Signal Process. 2017, 11, 247–258. [Google Scholar] [CrossRef]
- Li, G.; Yang, S.; Nie, Z. Direction of Arrival Estimation in Time Modulated Linear Arrays With Unidirectional Phase Center Motion. IEEE Trans. Antennas Propag. 2010, 58, 1105–1111. [Google Scholar] [CrossRef]
- He, C.; Cao, A.; Chen, J.; Liang, X.; Zhu, W.; Geng, J.; Jin, R. Direction Finding by Time-Modulated Linear Array. IEEE Trans. Antennas Propag. 2018, 66, 3642–3652. [Google Scholar] [CrossRef]
- He, C.; Liang, X.; Li, Z.; Geng, J.; Jin, R. Direction Finding by Time-Modulated Array With Harmonic Characteristic Analysis. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 642–645. [Google Scholar] [CrossRef]
- Rocca, P.; Zhu, Q.; Bekele, E.; Yang, S.; Massa, A. 4-D Arrays as Enabling Technology for Cognitive Radio Systems. IEEE Trans. Antennas Propag. 2014, 62, 1102–1116. [Google Scholar] [CrossRef]
- Zhu, Q.; Yang, S.; Yao, R.; Nie, Z. Directional Modulation Based on 4-D Antenna Arrays. IEEE Trans. Antennas Propag. 2014, 62, 621–628. [Google Scholar] [CrossRef]
- Bogdan, G.; Yashchyshyn, Y.; Jarzynka, M. Time-Modulated Antenna Array With Lossless Switching Network. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1827–1830. [Google Scholar] [CrossRef]
- Yao, A.M.; Wu, W.; Fang, D.G. Single-Sideband Time-Modulated Phased Array. IEEE Trans. Antennas Propag. 2015, 63, 1957–1968. [Google Scholar] [CrossRef]
- Bogdan, G.; Godziszewski, K.; Yashchyshyn, Y.; Kim, C.H.; Hyun, S. Time Modulated Antenna Array for Real-Time Adaptation in Wideband Wireless Systems-Part I: Design and Characterization. IEEE Trans. Antennas Propag. 2019, 68, 6964–6972. [Google Scholar] [CrossRef]
- Maneiro-Catoira, R.; García-Naya, J.A.; Brégains, J.C.; Castedo, L. Multibeam Single-Sideband Time-Modulated Arrays. IEEE Access 2020, 8, 151976–151989. [Google Scholar] [CrossRef]
- Understanding RF/Microwave Solid State Switches and Their Applications. Keysight Application Note. Available online: http://www.keysight.com/us/en/assets/7018-01705/application-notes/5989-7618.pdf (accessed on 30 September 2021).
- Zeng, Q.; Yang, P.; Yin, L.; Lin, H.; Wu, C.; Yang, F.; Yang, S. Phase Modulation Technique for Harmonic Beamforming in Time-Modulated Arrays. IEEE Trans. Antennas Propag. 2021, in press. [Google Scholar] [CrossRef]
- Analog Devices. SPDT Switches, DVariable Phase Shifters. HMC545A. HMC649A, HMC642A. Available online: https://www.analog.com (accessed on 30 September 2021).
- Qorvo. Monolithic Microwave Integrated Circuit (MMIC) Digital Phase Shifters. Available online: http://www.qorvo.com (accessed on 30 September 2021).
- Macom. MMIC Digital Phase Shifters and SPMT Switches: MASW-00x100 Series. Available online: https://www.macom.com (accessed on 30 September 2021).
- Minicircuits. Available online: http://www.minicircuits.com (accessed on 30 September 2021).
- Rogers. RO4000 Hydrocarbon Ceramic Laminates. Available online: https://www.rogerscorp.com (accessed on 30 September 2021).
- Hong, W.; Jiang, Z.H.; Yu, C.; Zhou, J.; Chen, P.; Yu, Z.; Zhang, H.; Yang, B.; Pang, X.; Jiang, M.; et al. Multibeam Antenna Technologies for 5G Wireless Communications. IEEE Trans. Antennas Propag. 2017, 65, 6231–6249. [Google Scholar] [CrossRef]




| q | i | Frequency | Dynamic Excitations () | (dB) |
|---|---|---|---|---|
| 1 | 1 | 0 | ||
| 1 | 0 | |||
| 1 | ||||
| 1 | 7 | |||
| 1 |
| q | i | Frequency | Dynamic Excitations () | (dB) |
|---|---|---|---|---|
| 1 | 1 | 0 | ||
| 1 | 0 | |||
| 1 | 7 | |||
| 1 | ||||
| 1 | ||||
| Architecture | SPDT Switches | Splitters | TMA Cost Savings (%) | ||
|---|---|---|---|---|---|
| standard PA | 24 | 2 | - | ||
| TMA AM [18] | 9 | 8 | |||
| TMA AM/PM [this work] | 7 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maneiro-Catoira, R.; Brégains, J.; García-Naya, J.A.; Castedo, L. Dual-Beam Steerable TMAs Combining AM and PM Switched Time-Modulation. Sensors 2022, 22, 1399. https://doi.org/10.3390/s22041399
Maneiro-Catoira R, Brégains J, García-Naya JA, Castedo L. Dual-Beam Steerable TMAs Combining AM and PM Switched Time-Modulation. Sensors. 2022; 22(4):1399. https://doi.org/10.3390/s22041399
Chicago/Turabian StyleManeiro-Catoira, Roberto, Julio Brégains, José A. García-Naya, and Luis Castedo. 2022. "Dual-Beam Steerable TMAs Combining AM and PM Switched Time-Modulation" Sensors 22, no. 4: 1399. https://doi.org/10.3390/s22041399