
Research on Shipborne Helicopter Electric Rapid Secure Device: System Design, Modeling, and Simulation

 ,
,
Abstract
:1. Introduction
2. RSD Working Characteristics
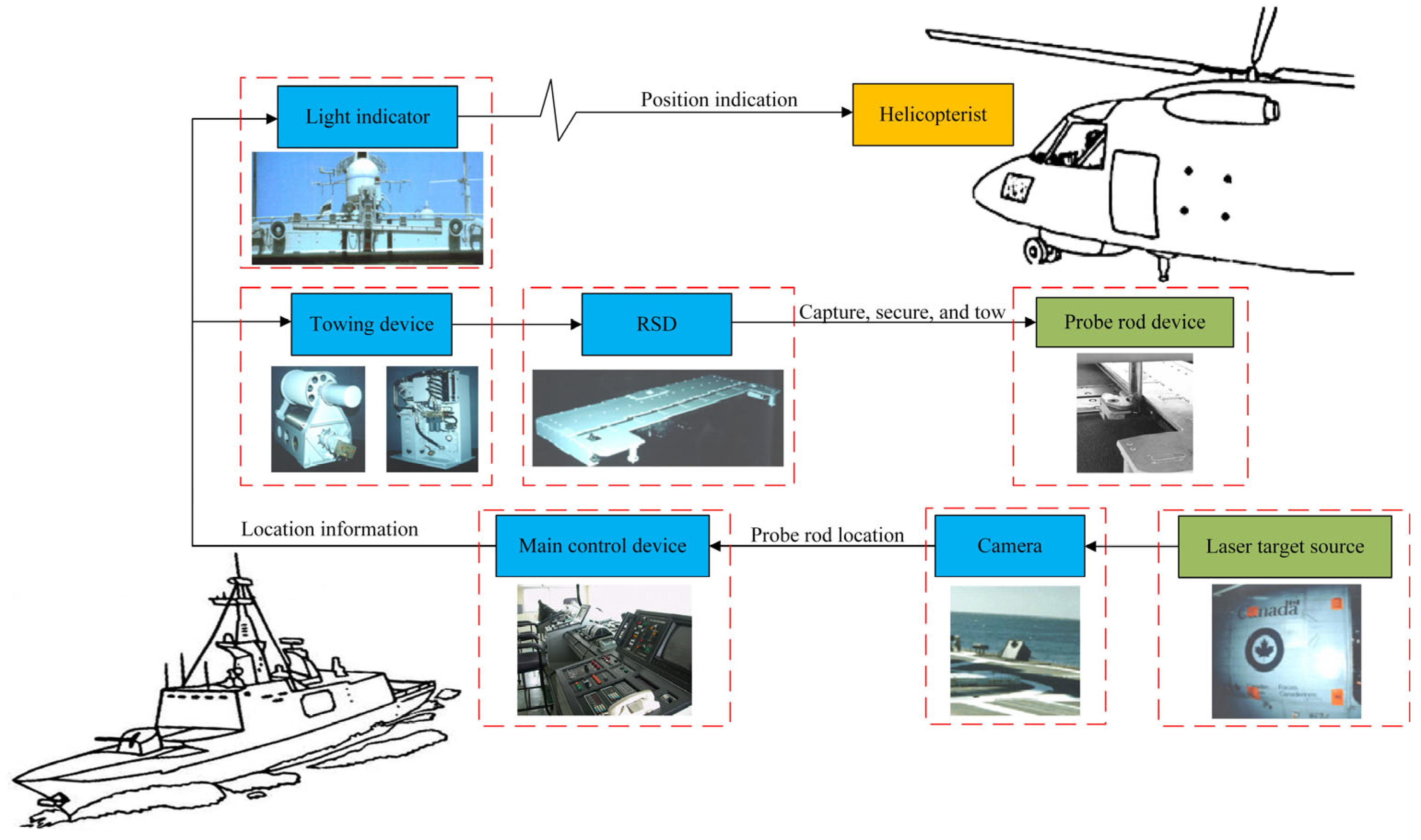
2.1. The Functional Principle of ASIST
- When performing the shipborne helicopter capture mission, the RSD uses an accumulator as the power source to drive the claw movement through a hydraulic cylinder. In this process, the velocity of the claw is uncontrollable, which leads to a significant impact force of the claw on the probe rod. As shown in Figure 3, the impact force was measured as high as 5 kN. Therefore, ASIST cannot assist the landing of small shipborne aircraft such as the UAV, which significantly limits the scope of its application;
- When performing the shipborne helicopter towing mission, the RSD uses a quantitative hydraulic pump as its power source, making the claw’s velocity uncontrollable. As a result, the position of the shipborne helicopter needs to be adjusted repeatedly during the towing process. Moreover, the process is time-consuming, complicated, and requires highly experienced operators.
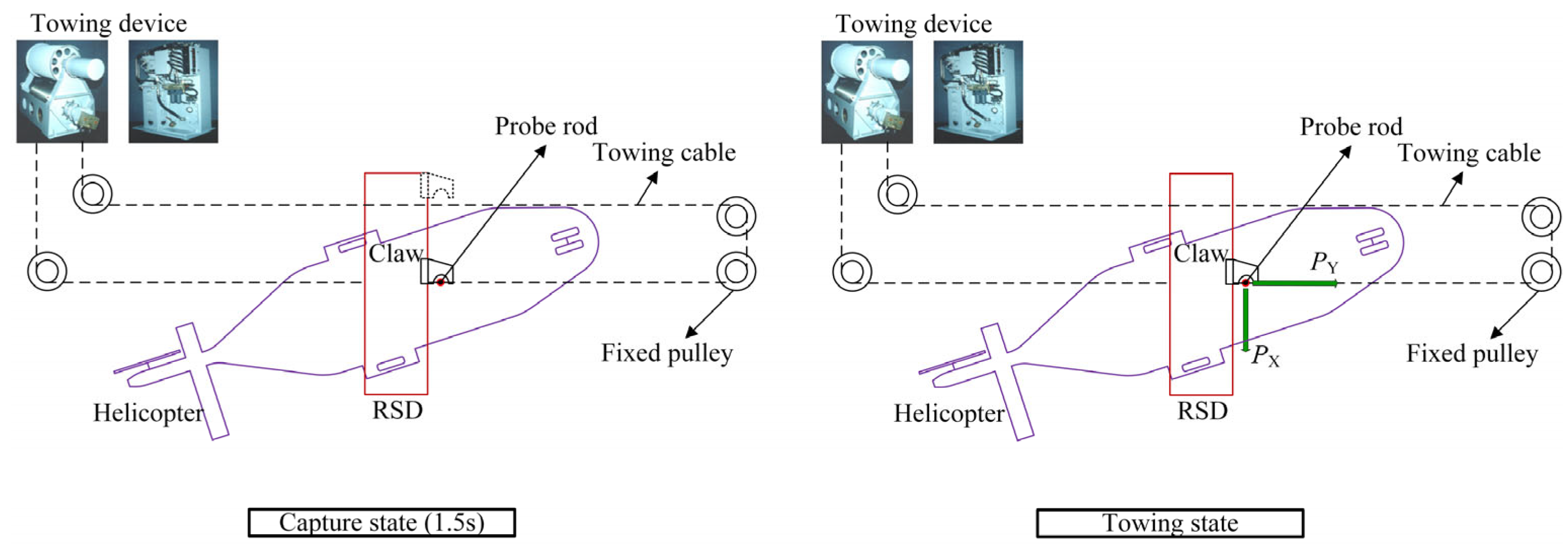
2.2. Force Analysis of RSD
- After the helicopter lands, the RSD drives the mechanical claw to capture the probe rod within no more than 1.5 s;
- After capturing the probe rod, the RSD can reliably lock the helicopter by the claw under the condition of no more than 7-level sea conditions;
- Under the condition of no more than 3-level sea conditions, the RSD and towing device work together to tow the helicopter to the designated position.
3. Design of ERSD
3.1. Main Transmission System Design
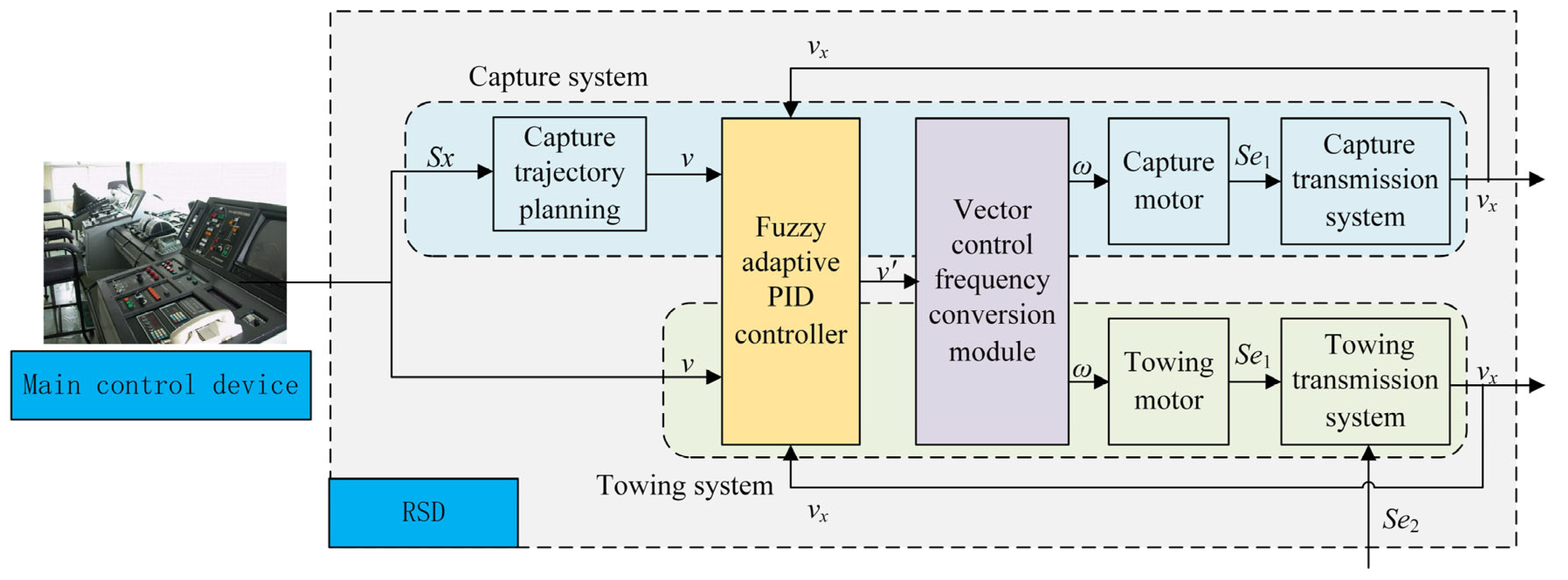
3.2. Control System Design
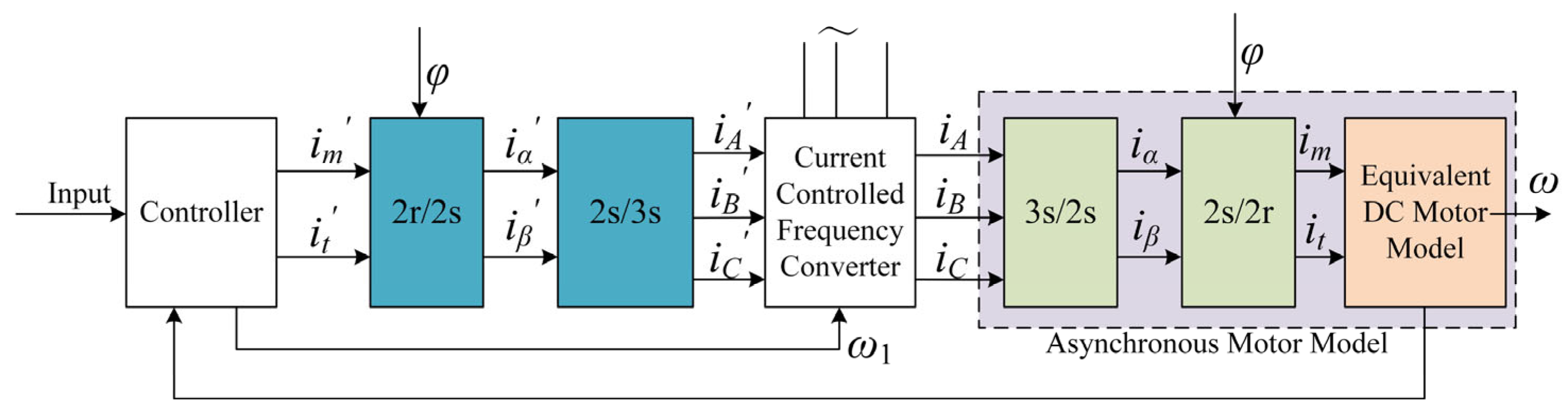
3.2.1. Vector Control Frequency Conversion Module
3.2.2. Fuzzy Adaptive PID Controller Design
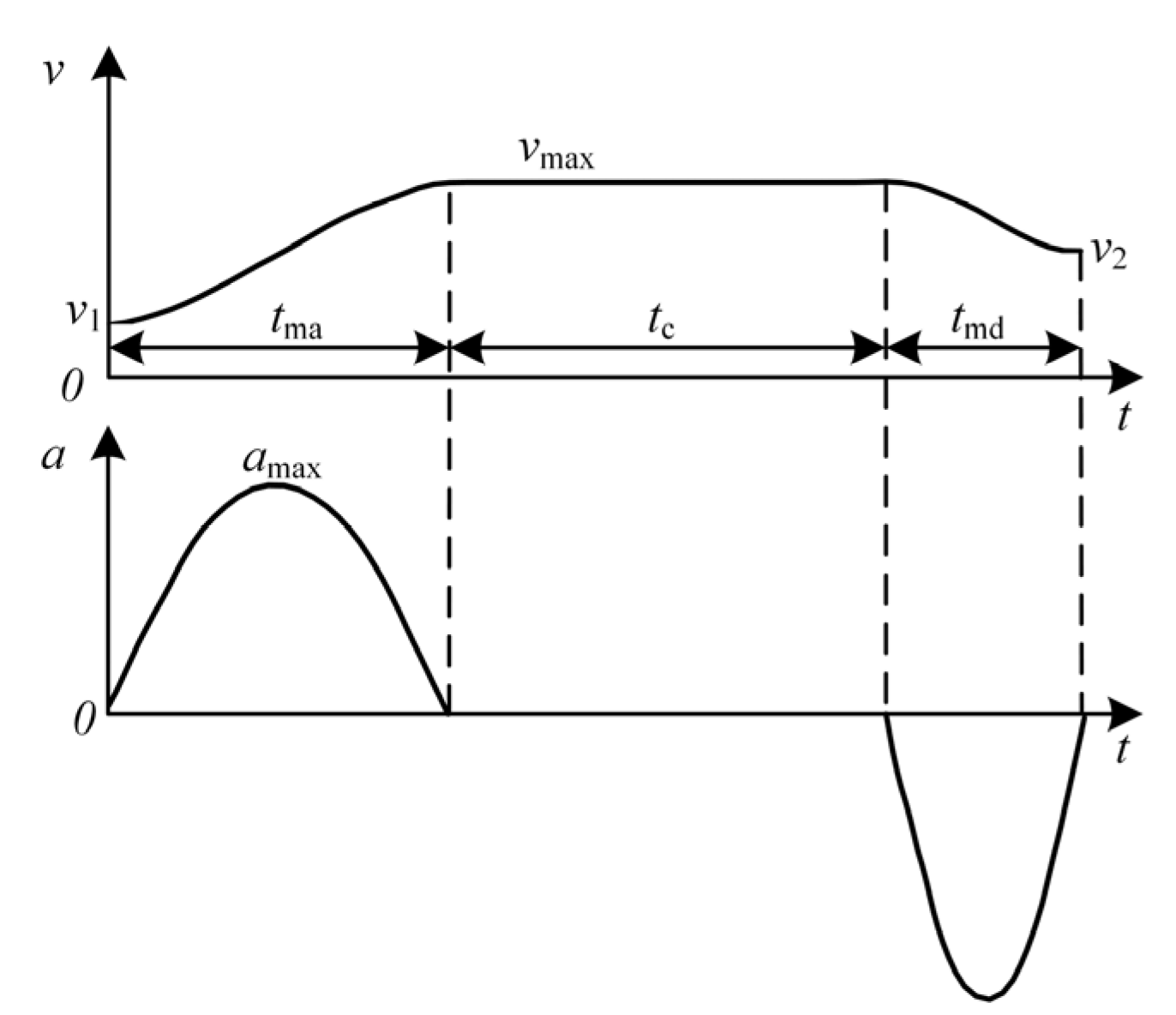
3.3. The Capture Trajectory Planning
- The total capture time should be as short as possible, and the maximum capture range should not be less than 2000 mm;
- The velocity changes as smoothly as possible during the capture process;
- When the claw captures the probe rod, the impact force does not exceed 1000 N. (The experimental results show that the allowable capture velocity is approximately 0.8 m/s).
- The far range
- 2.
- The mid range
- 3.
- The close range
4. System Modeling and Simulation
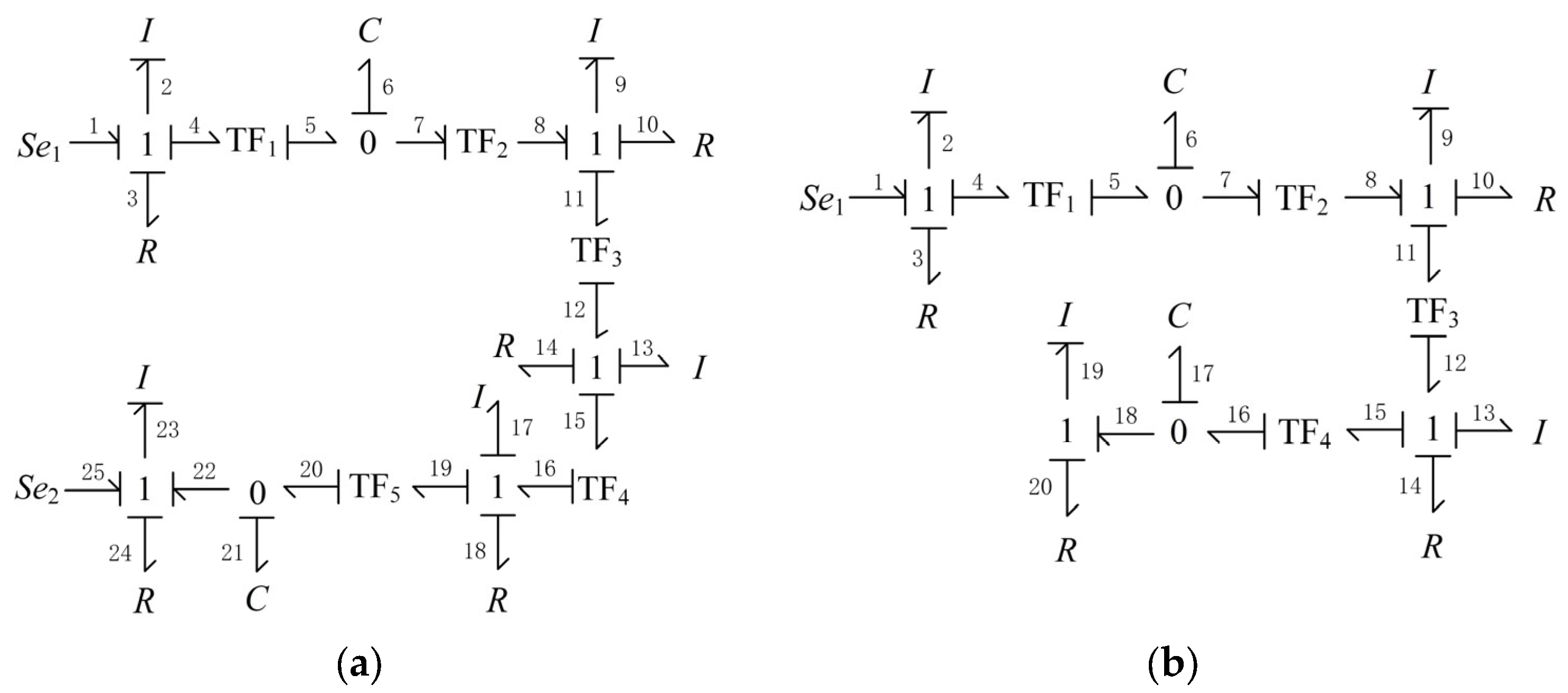
4.1. Dynamic Model of the Transmission System
- The driving torque of the towing motor (Se1) overcomes the rotational damping (R3) and drives the active belt wheel to rotate (I2);
- The active belt wheel drives the driven shaft, electromagnetic brake, and gearbox input shaft to overcome the rotational damping and rotate together (I9, R10) through the synchronous belt (TF1, TF2), during which the length of the synchronous belt will change with the change of the tension force on the belt (C6);
- After the gearbox (TF3), the output shaft drives the clutch and ball screw to rotate together (I13, R14);
- The screw transmission pair of the ball screw (TF4) transforms the fixed axis rotation of the screw into the axial translation of the movable pulley (I17, R18);
- Through pulley transmission (TF5), the movable pulley drives the chain and claw to overcome friction damping and move laterally (I23, R24); and the length of the chain also varies with the tension (C21);
- The probe road also applies an external load force to the claw (Se2).
4.2. System Controllability Analysis
4.3. System Simulating
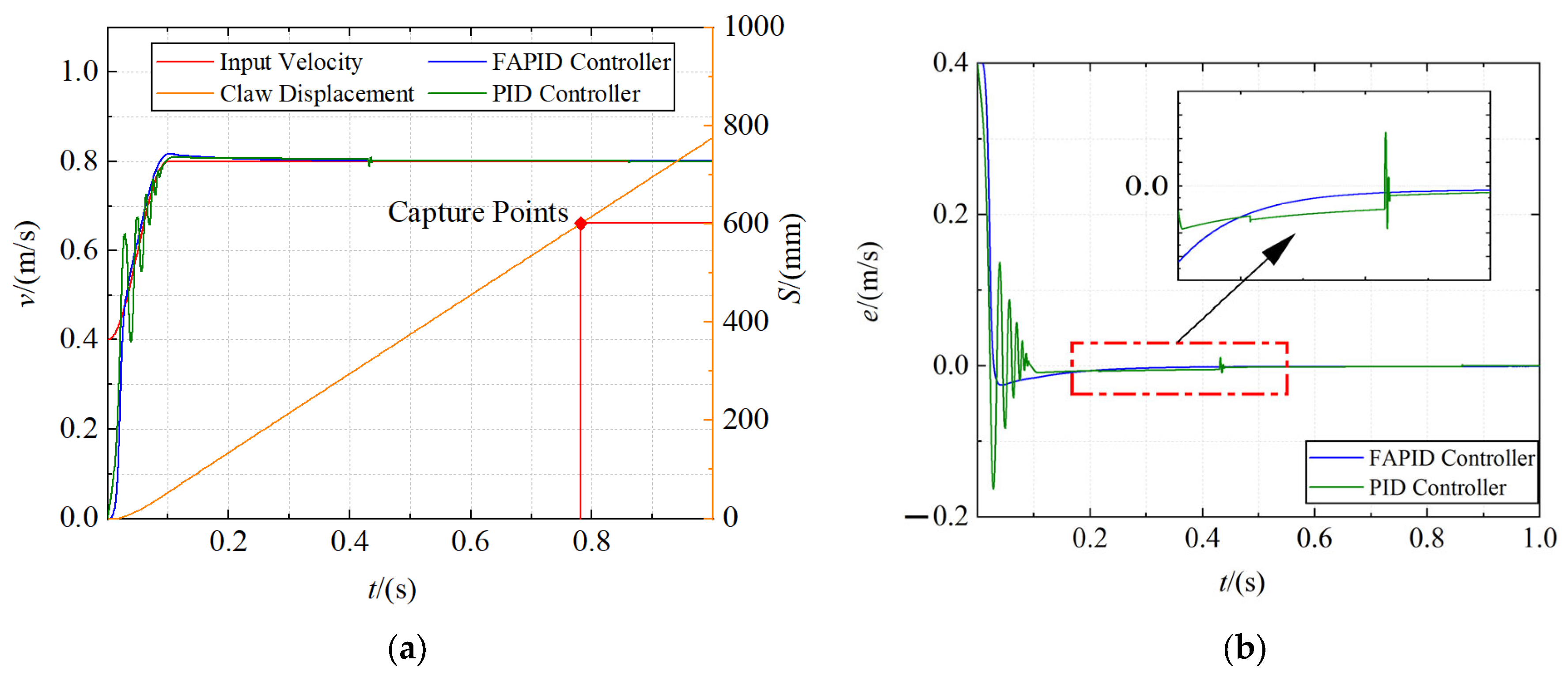
- Capture system simulation
- 2.
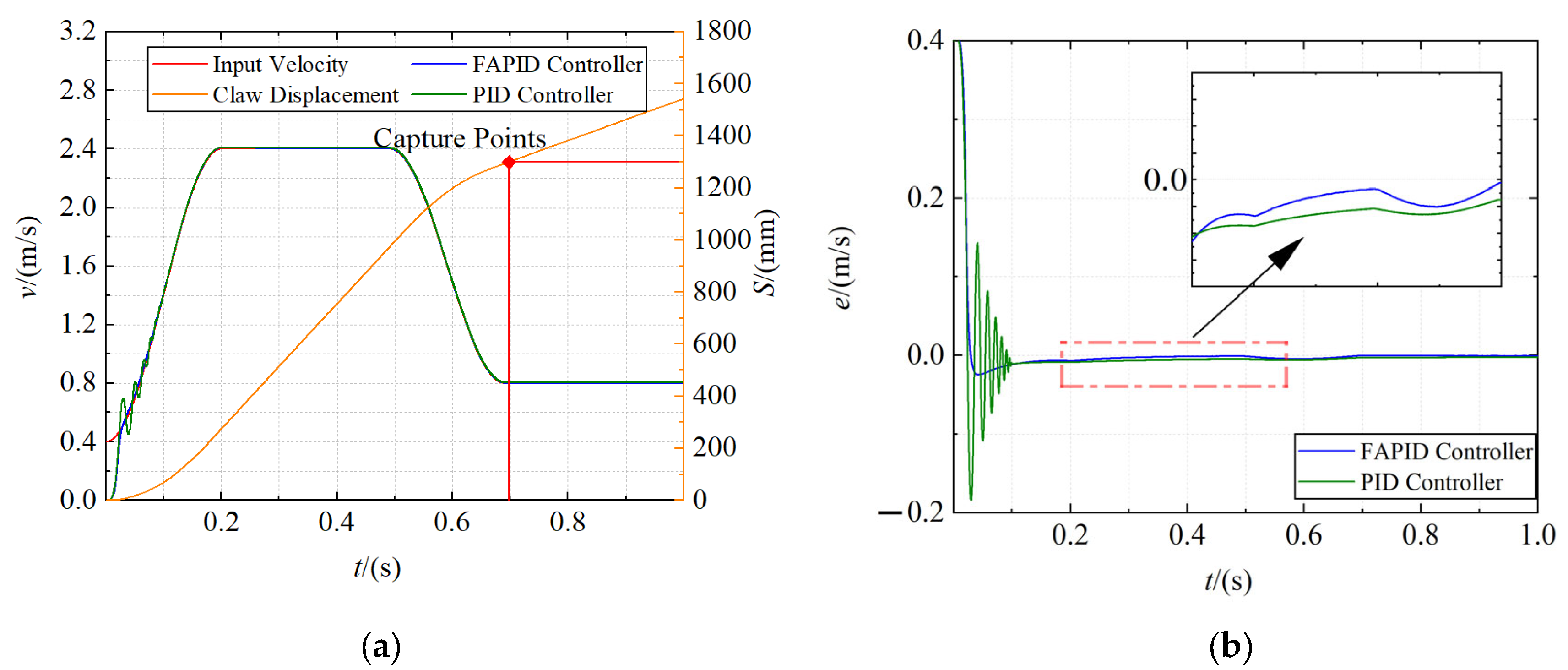
- Towing system simulation
5. Discussion
- As shown in Figure 15, based on meeting the functional requirements of the original RSD, the ERSD reduces the maximum capture time by approximately 47%, the maximum capture velocity by approximately 53%, and the capture impact force by approximately 80%;
- The claw can still have good velocity tracking performance under the maximum interference load of 34,000 N.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Chang, B.; Wang, H.; Yang, L. Status and development trends of the shipboard helicopters. Fligh. Dynam. 2016, 34, 7–12. [Google Scholar]
- Liao, Z.; Lu, X.; Huang, Y.; Zhen, Z. Research progress of landing guidance and control for carrier-based helicopter. Trans. Nanjing. Univ. Aeronaut. Astronaut. 2018, 50, 745–753. [Google Scholar]
- Zan, S.J. Experimental determination of rotor thrust in a ship airwake. J. Am. Helicopter. Soc. 2002, 47, 100–108. [Google Scholar] [CrossRef]
- Lee, R.G.; Zan, S.J. Unsteady aerodynamic loading on a helicopter fuselage in a ship airwake. J. Am. Helicopter. Soc. 2004, 49, 149–159. [Google Scholar] [CrossRef]
- Colwell, J.L. Effects of flight deck motion in high seas on the hovering maritime helicopter. In Proceedings of the 58th Annual Forum Proceedings-AHS International, Montréal, QC, Canada, 11–13 June 2002. [Google Scholar]
- Wall, A.S.; Afagh, F.F.; Langlois, R.G.; Zan, S.J. Modeling helicopter blade sailing: Dynamic formulation and validation. J. Appl. Mech. 2008, 75, 61004–61014. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Z.C.; Xiong, Z.; Xiao, J.X.; Li, G.H. Collision modeling method of ship-board helicopter landing. J. Syst. Eng. Electron. 2015, 430, 1691–1696. [Google Scholar]
- Zhao, D.X.; Wang, Q.; Zhang, Z.X. Extenics theory for reliability assessment of carrier helicopter based on analytic hierarchy process. J. Jilin Univ. Eng. Tech. 2016, 46, 1528–1531. [Google Scholar]
- Wang, Q.; Zhao, D.X.; Wei, H.L.; Zhao, Y. Study of the landing dynamics of carrier based helicopter under complex sea conditions. J. Northeast. Univ. Nat. Sci. 2017, 38, 1595–1600. [Google Scholar]
- Wang, Q.; Zhao, D.X.; Zhao, Y.; Chen, N. Dynamic analysis of carrier helicopter on complex. J. Jilin Univ. Eng. Tech. 2017, 47, 1109–1113. [Google Scholar]
- Salt, D. Electro-optic precision approach and landing system. In Proceedings of the Synthetic Vision for Vehicle Guidance and Control, Orlando, FL, USA, 17–18 April 1995. [Google Scholar]
- Grant, L.J.V. Talon Hydraulic Helicopter/Shipboard Securing System. Nav. Eng. J. 1991, 103, 212–217. [Google Scholar] [CrossRef]
- Linn, D.R.; Langlois, R.G. Development and experimental validation of a shipboard helicopter on-deck maneuvering simulation. J. Aircr. 2006, 43, 895–906. [Google Scholar] [CrossRef]
- Boukhalfa, G.; Belkacem, S.; Chikhi, A.; Benaggoune, S. Genetic algorithm and particle swarm optimization tuned fuzzy PID controller on direct torque control of dual star induction motor. J. Cent. South. Univ. 2019, 26, 1886–1896. [Google Scholar] [CrossRef]
- Qi, X.; Su, T.; Zhou, K.; Yang, J.; Gan, X.; Zhang, Y. Development of ac motor model predictive control strategy: An overview. P. CSEE 2021, 41, 6408–6418. [Google Scholar]
- He, H.C.; Sun, L.; Zhang, Y.F. Asynchronous motor active disturbance rejection control based on vector control. Electr. Mach. Contrl. 2019, 31, 120–125. [Google Scholar]
- He, H.C.; Sun, L.; Zhang, Y.F.; Zhou, Q. Research of sensorless vector control performance for induction motor at very low-speed and zero-speed. P. CSEE 2019, 39, 6095–6103+6190. [Google Scholar]
- Lei, A.; Song, C.X.; Lei, Y.L.; Yao, F. Design Optimization of vehicle asynchronous motors based on fractional harmonic response analysis. Mech. Sci. 2021, 12, 689–700. [Google Scholar] [CrossRef]
- Xia, C.Y.; Yu, J.L.; Tian, C.Y.; Hou, X.X. Slip frequency type vector control for brushless doubly-fed machine. Control. Decis. 2019, 34, 649–654. [Google Scholar]
- Li, Y.; Qin, Y.; Zhou, Y.; Zhao, C. Model predictive torque control for permanent magnet synchronous motor based on dynamic finite-control-set using fuzzy control. Energy Rep. 2020, 6, 128–133. [Google Scholar] [CrossRef]
- Zhao, X.M.; Wang, H.L.; Zhu, W.B. Feedback linearization control of permanent magnet linear synchronous motor based on adaptive fuzzy controller and nonlinear disturbance observer. Control Theory A 2021, 38, 595–602. [Google Scholar]
- Liu, Q.; Zhang, Z.; Zhao, D.; Wang, L.; Meng, F.; Liu, C. Research on Speed Tracking of Asynchronous Motor Based on Fuzzy Control and Vector Control. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar]
- Tipsuwanpom, R.; Runghimmawan, T.; Intajag, S.; Krongratana, V. Fuzzy logic PID controller based on FPGA for process control. In Proceedings of the 2004 IEEE International Symposium on Industrial Electronics, Ajaccio, France, 4–7 May 2004. [Google Scholar]
- Guo, X.G.; Li, C.X. A new flexible acceleration and deceleration algorithm. J. Shanghai Jiaotong Univ. 2003, 2, 205–207+212. [Google Scholar]
- Aftabi Talami, M.; Jamali, A.; Nariman-zadeh, N. A new method for extracting the state equations from bond graph of dynamical systems (SEBG method). J. Gen. Syst. 2021, 50, 703–723. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Parameters | Value | Name of Parameters | Value |
|---|---|---|---|
| LH | 0.9 m | MH | 10,000 kg |
| LE | 0.9 m | L | 7 m |
| B | 3.5 m | H | 2 m |
| LW | 0.9 m | HW | 1.3 m |
| Name of Parameters | 3-Level Sea Condition | 7-Level Sea Condition |
|---|---|---|
| ρ | 1.29 kg/m3 | 1.29 kg/m3 |
| θ | 10° | 16° |
| ax | 1 m/s2 | 2 m/s2 |
| az | 2 m/s2 | 4 m/s2 |
| VW | 12 m/s | 30 m/s |
| Name of Parameters | Value | Name of Parameters | Value |
|---|---|---|---|
| Power of the asynchronous motor | 5 kW | Power of frequency converter | 5.5 kW |
| The reduction ratio of the gearbox | 40 | The lead of the ball screw | 20 mm |
| Friction torque of the brake | 30 N·m | Capture area width | 2000 mm |
| Name of Parameters | Value | Name of Parameters | Value |
|---|---|---|---|
| I2 | 1.04 × 10−3 kg·m2 | R14 | 2.5 × 10−3 N·m/(rad/s) |
| R3 | 8.2 × 10−4 N·m/(rad/s) | TF4(m4) | 2π/(20 × 10−3) rad/m |
| TF1(m1) | 1/48.51 × 10−3 rad/m | I17 | 35.753 kg |
| C6 | 1/15,200 m/N | R18 | 40 N/(m/s) |
| TF2(m2) | 48.51 × 10−3 m/rad | TF5(m5) | 1/2 |
| I9 | 3.865 × 10−3 kg·m2 | C21 | 0.5 × 10−7 m/N |
| R10 | 3.8 × 10−3 N·m/(rad/s) | I23 | 10,044.328 kg |
| TF3(m3) | 40 | R24 | 30 N/(m/s) |
| I13 | 2.295 × 10−2 kg·m2 | - | - |
| Name of Parameters | Value | Name of Parameters | Value |
|---|---|---|---|
| I2 | 1.04 × 10−3 kg·m2 | TF3(m3) | 2π/(20 × 10−3) rad/m |
| R3 | 8.2 × 10−4 N·m/(rad/s) | I13 | 35.753 kg |
| TF1(m1) | 1/48.51 × 10−3 rad/m | R14 | 40 N/(m/s) |
| C6 | 1/15,200 m/N | TF4(m4) | 1/2 |
| TF2(m2) | 48.51 × 10−3 m/rad | C17 | 0.5 × 10−7 m/N |
| I9 | 9.22 × 10−3 kg·m2 | I19 | 44.328 kg |
| R10 | 2 × 10−3 N·m/(rad/s) | R20 | 30 N/(m/s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Liu, Q.; Zhao, D.; Wang, L.; Yang, P. Research on Shipborne Helicopter Electric Rapid Secure Device: System Design, Modeling, and Simulation. Sensors 2022, 22, 1514. https://doi.org/10.3390/s22041514
Zhang Z, Liu Q, Zhao D, Wang L, Yang P. Research on Shipborne Helicopter Electric Rapid Secure Device: System Design, Modeling, and Simulation. Sensors. 2022; 22(4):1514. https://doi.org/10.3390/s22041514
Chicago/Turabian StyleZhang, Zhuxin, Qian Liu, Dingxuan Zhao, Lixin Wang, and Pengcheng Yang. 2022. "Research on Shipborne Helicopter Electric Rapid Secure Device: System Design, Modeling, and Simulation" Sensors 22, no. 4: 1514. https://doi.org/10.3390/s22041514