
Lessons Learned from a Distributed RF-EMF Sensor Network

 ,
,  , , ,
, , , 

Abstract
:1. Introduction
2. Materials and Methods
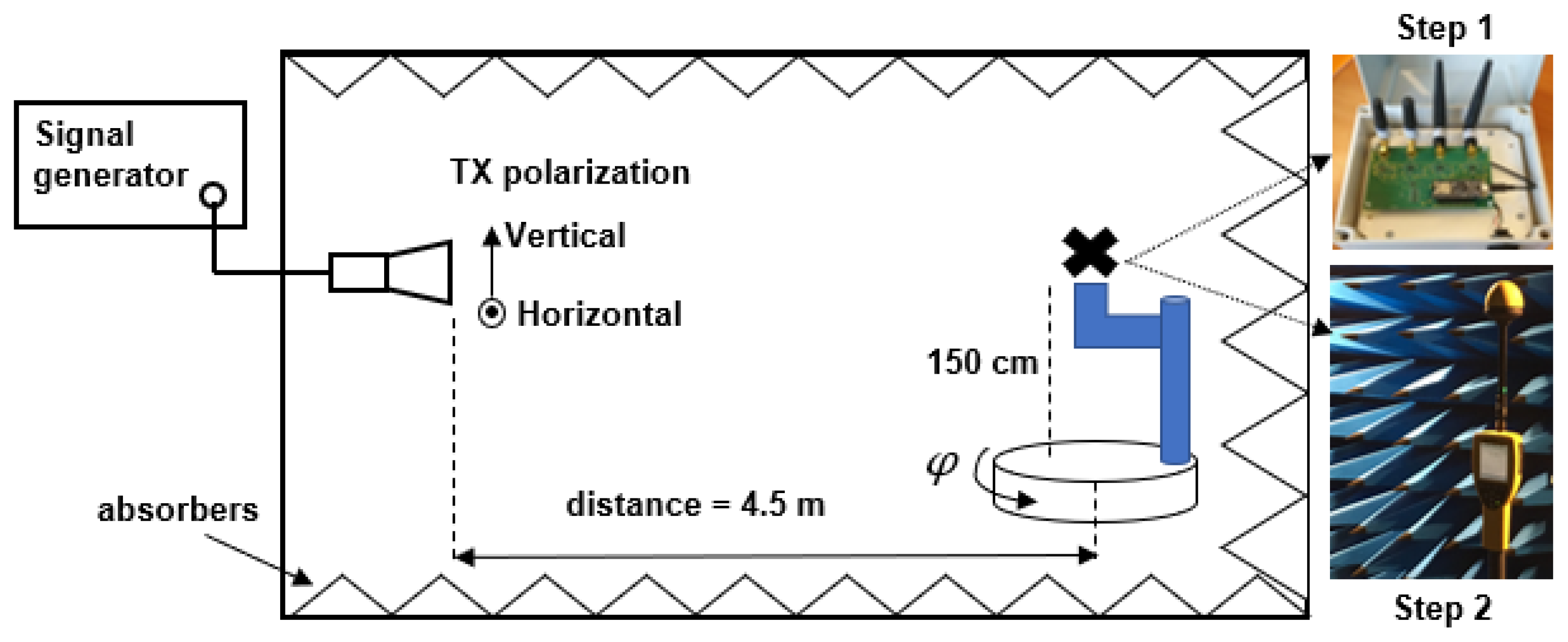
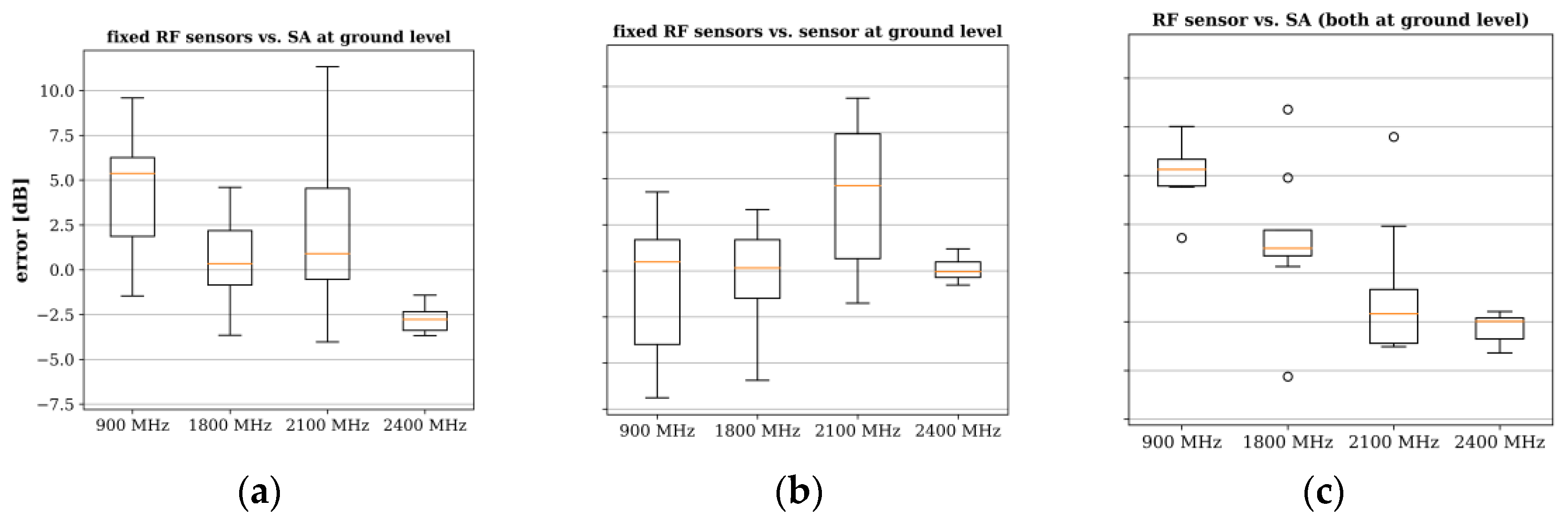
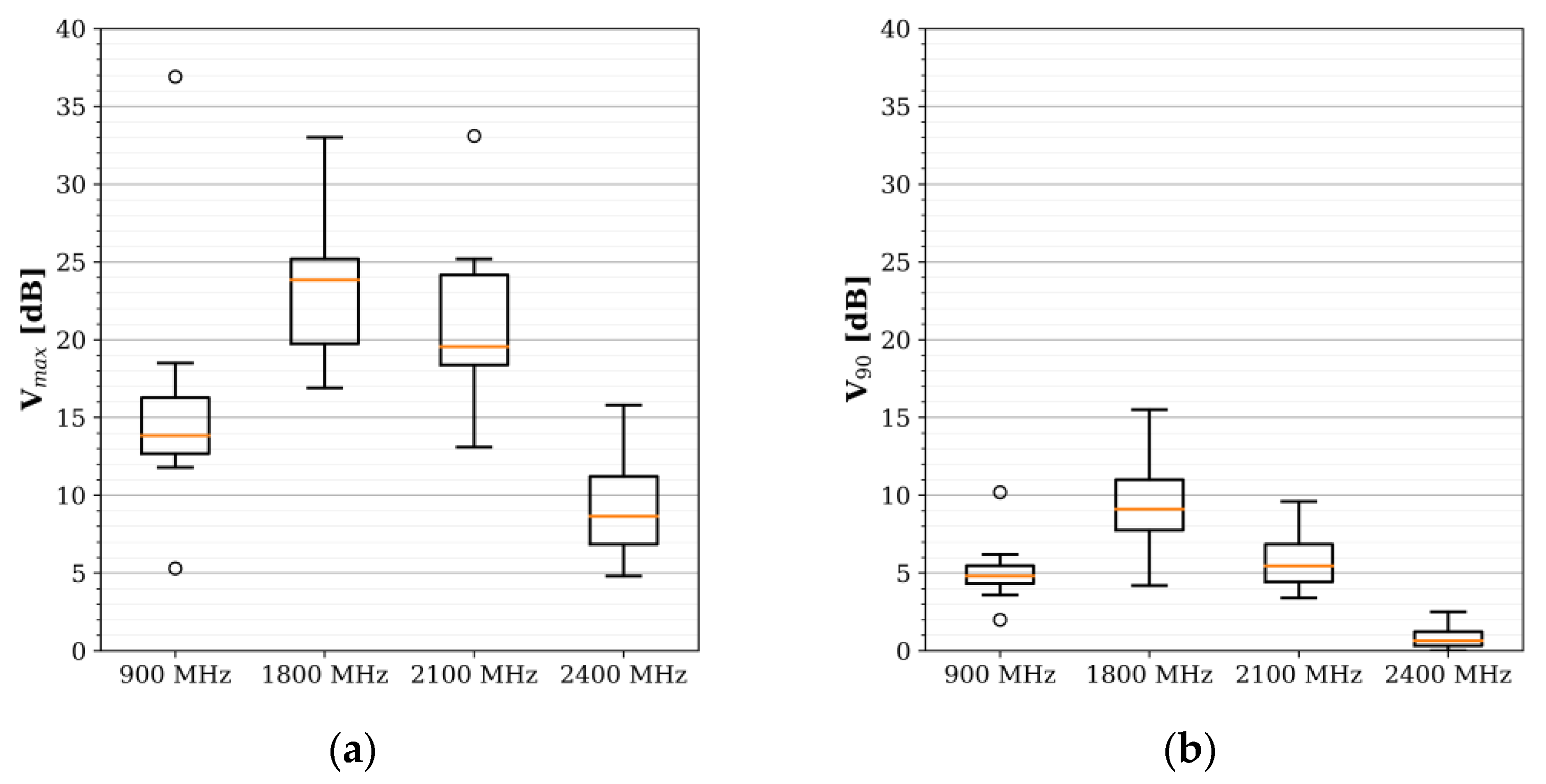
2.1. RF-EMF Sensor Node
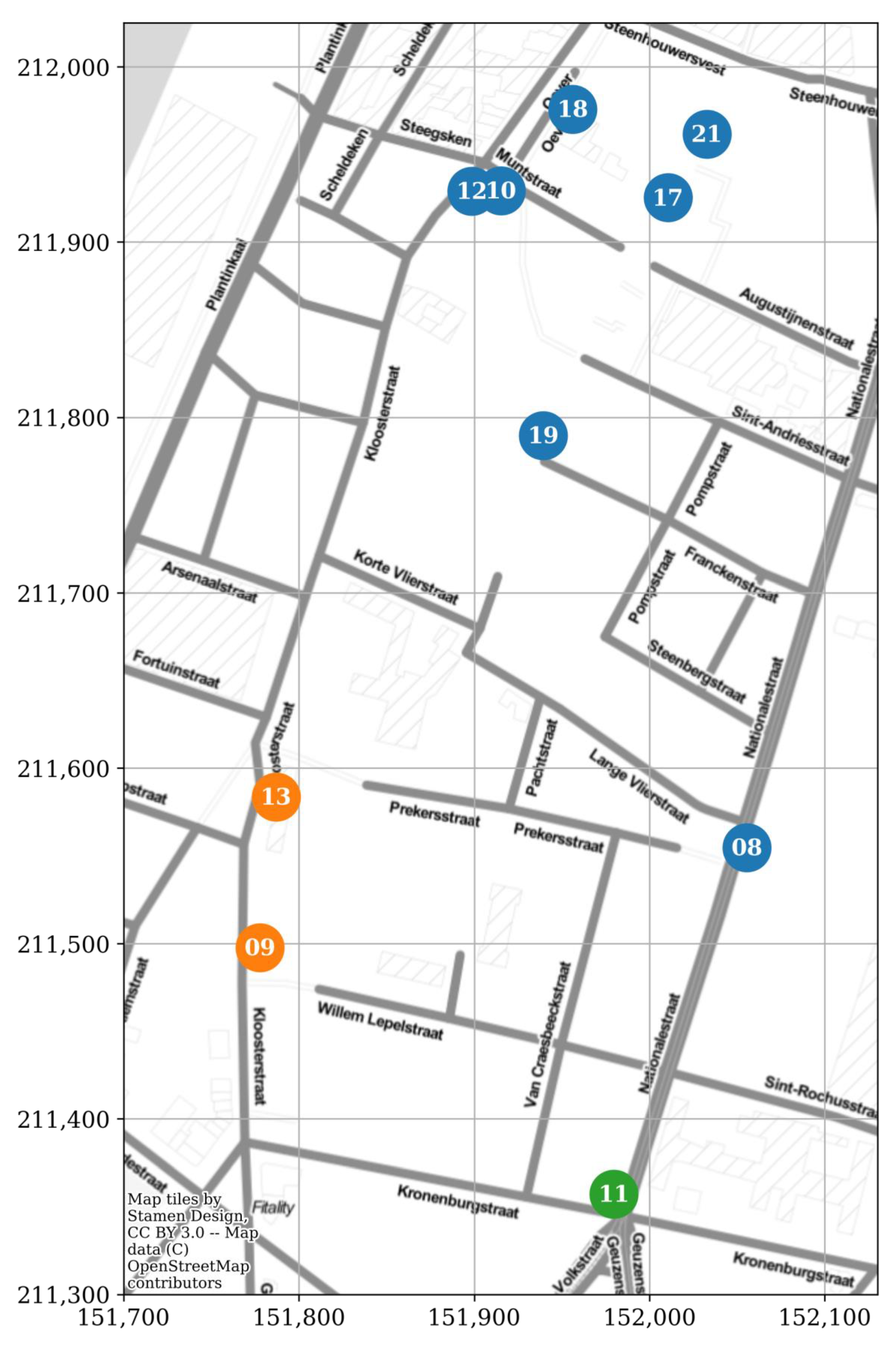
2.2. Deployment of Fixed RF-EMF Sensor Network
2.3. Deployment of Mobile RF-EMF Sensor Network
3. Results
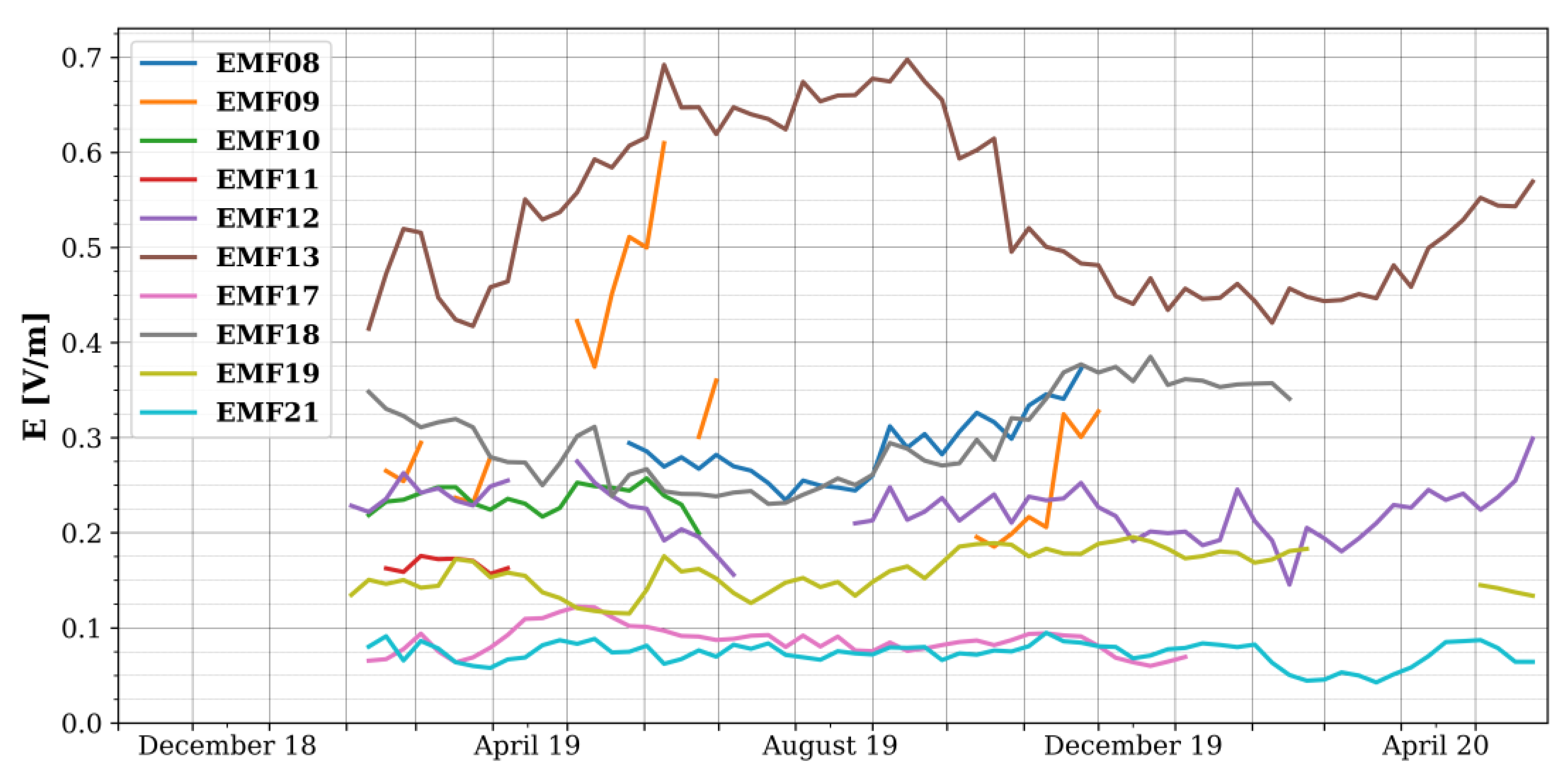
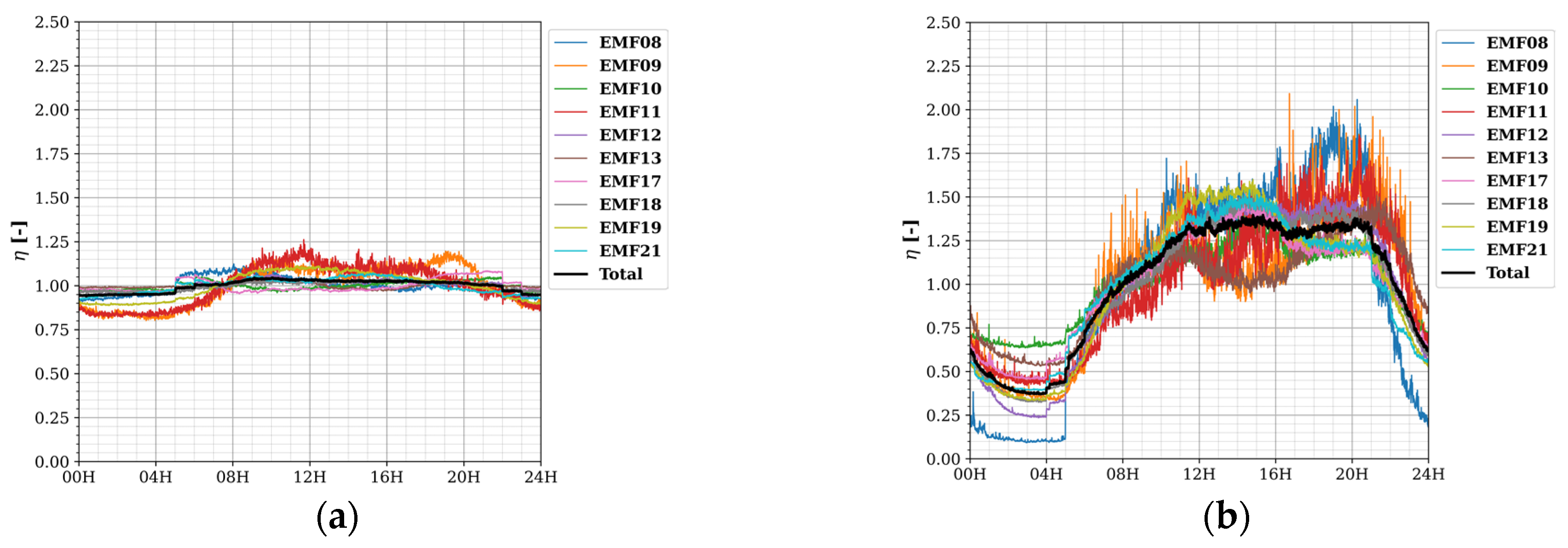
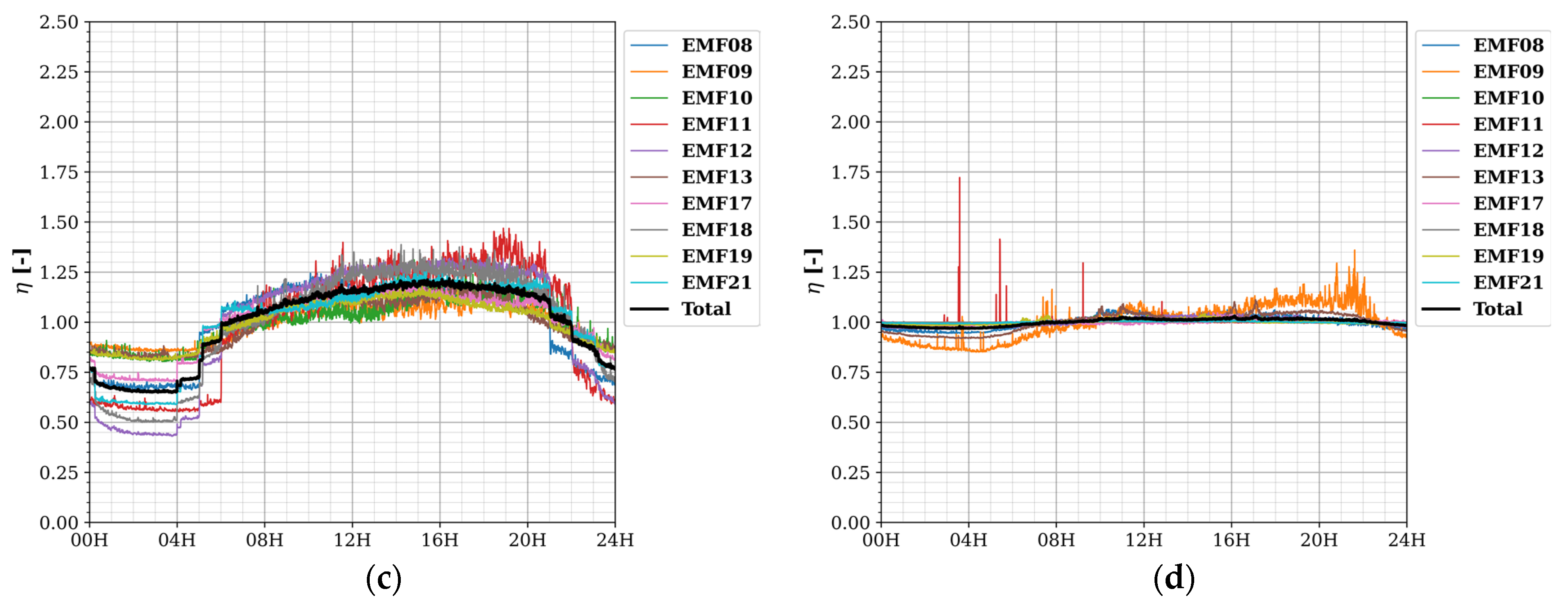
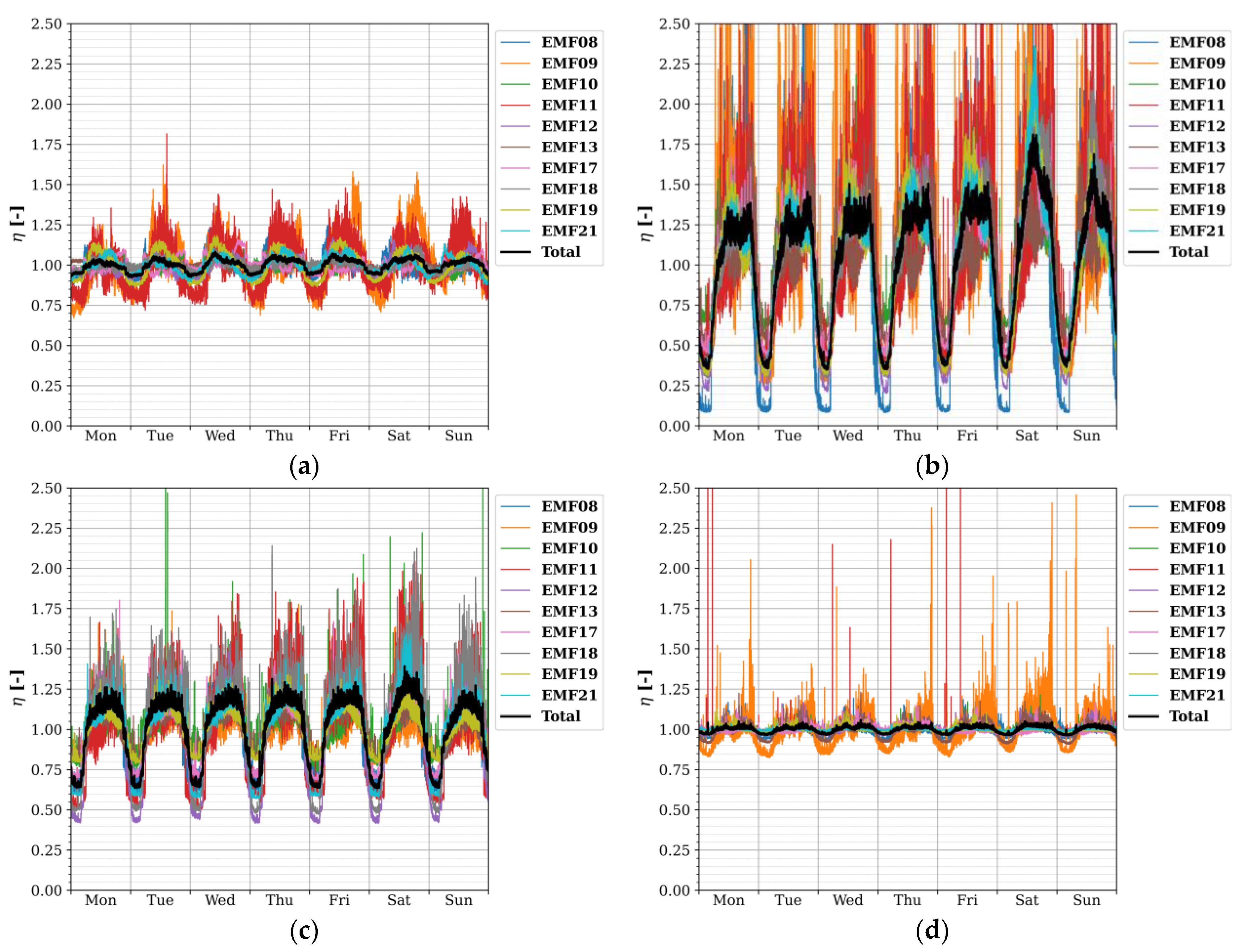
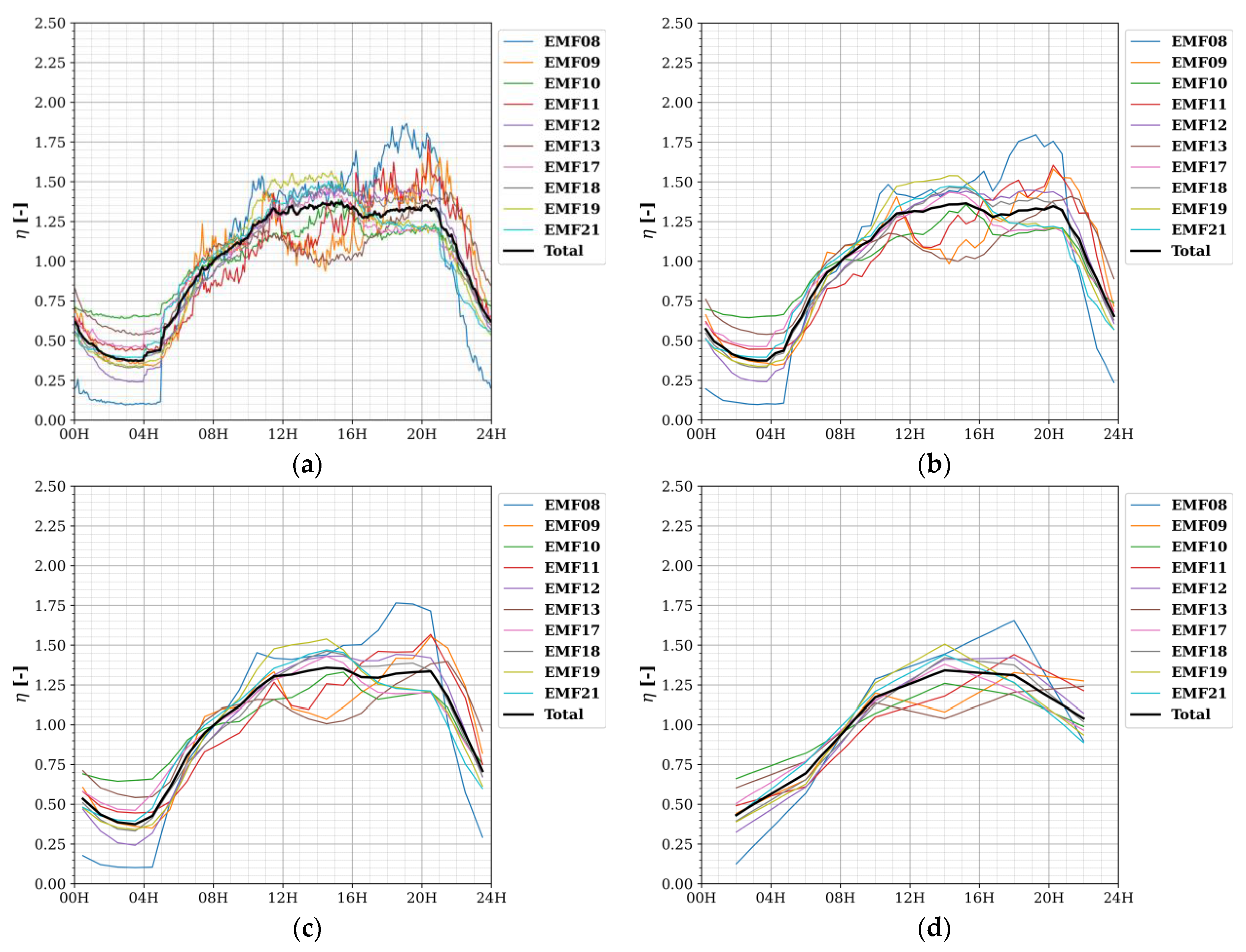
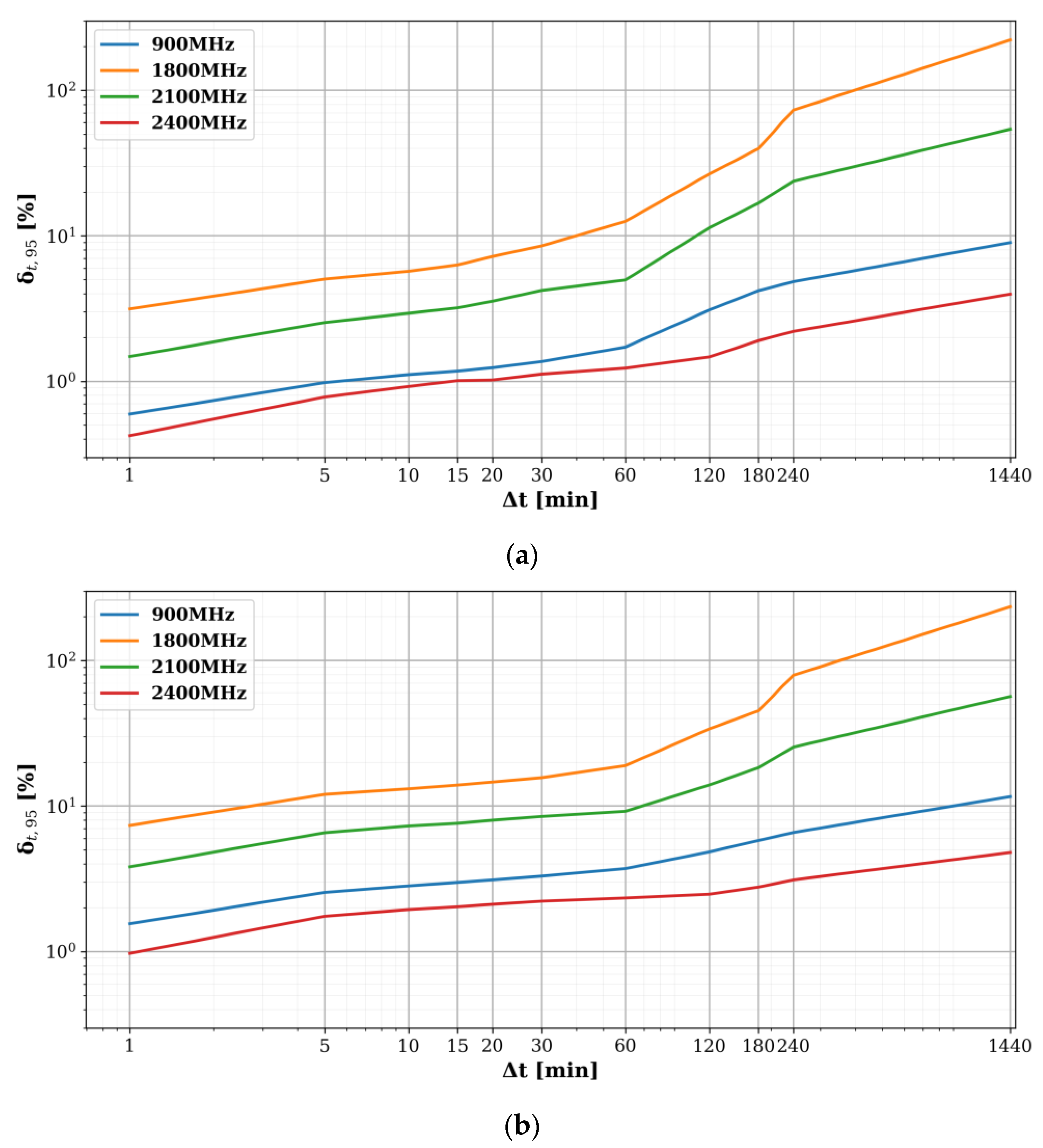
3.1. Temporal Variability of RF-EMF
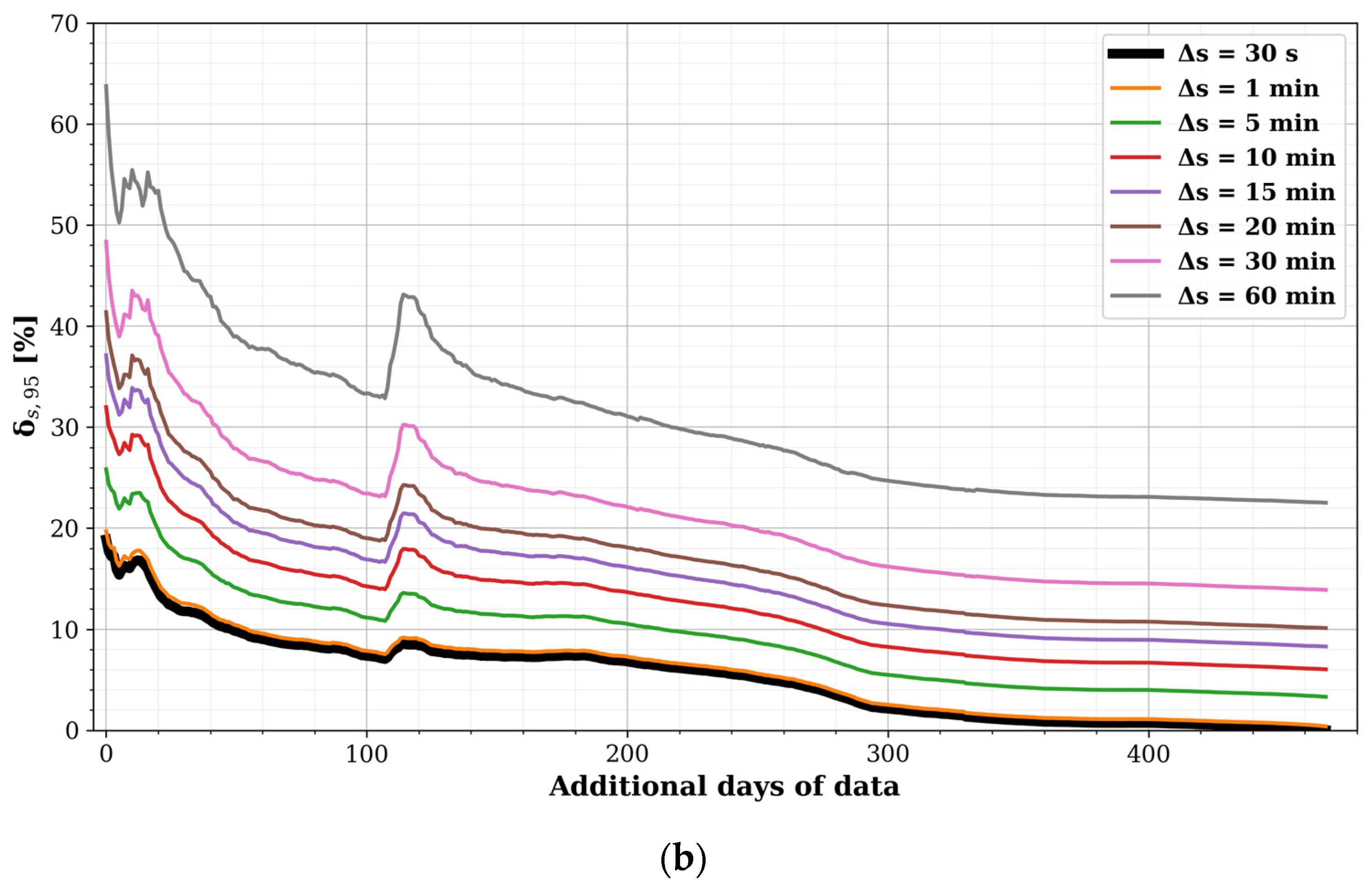
3.2. Lessons for Future RF-EMF Sensor Networks
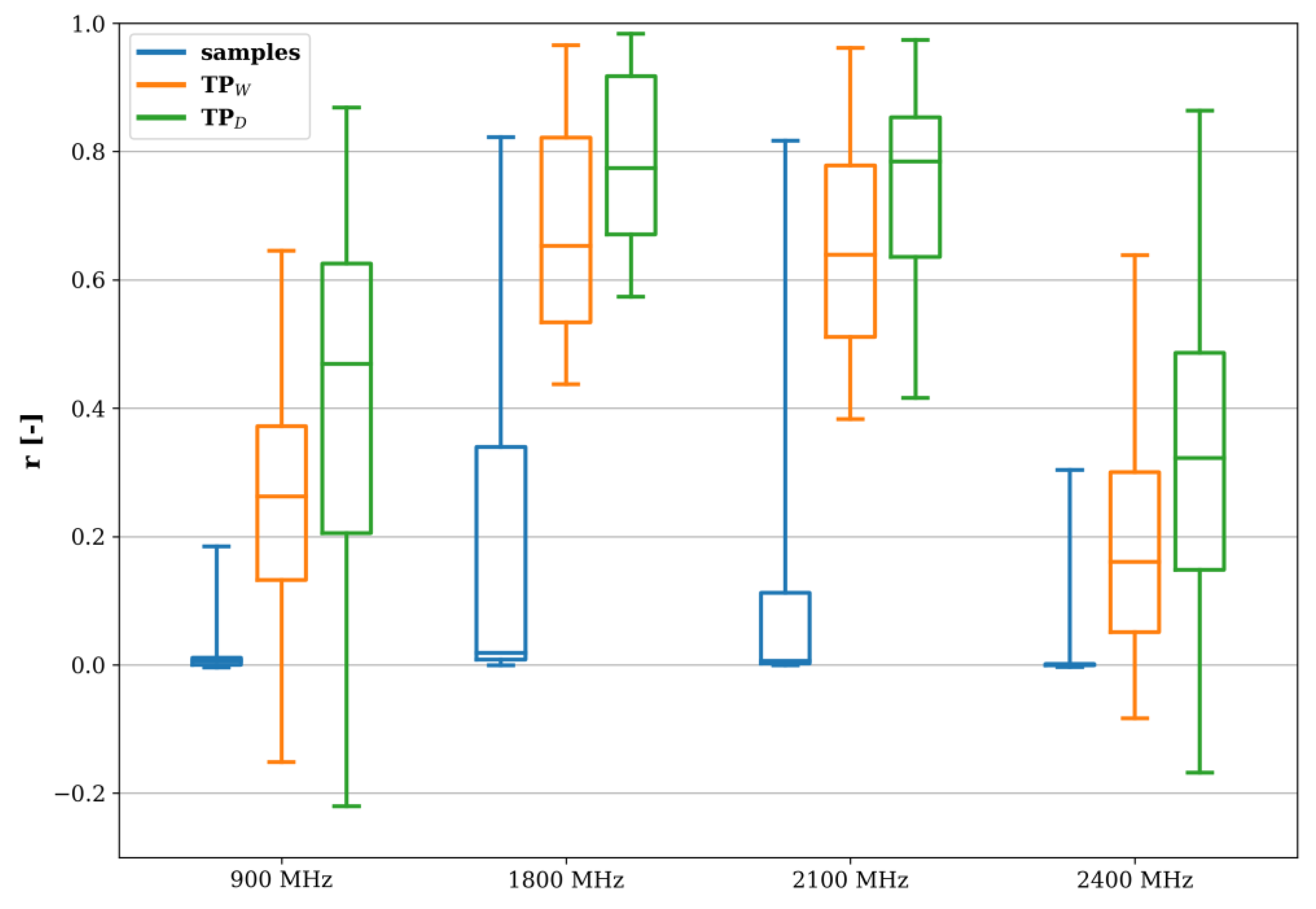
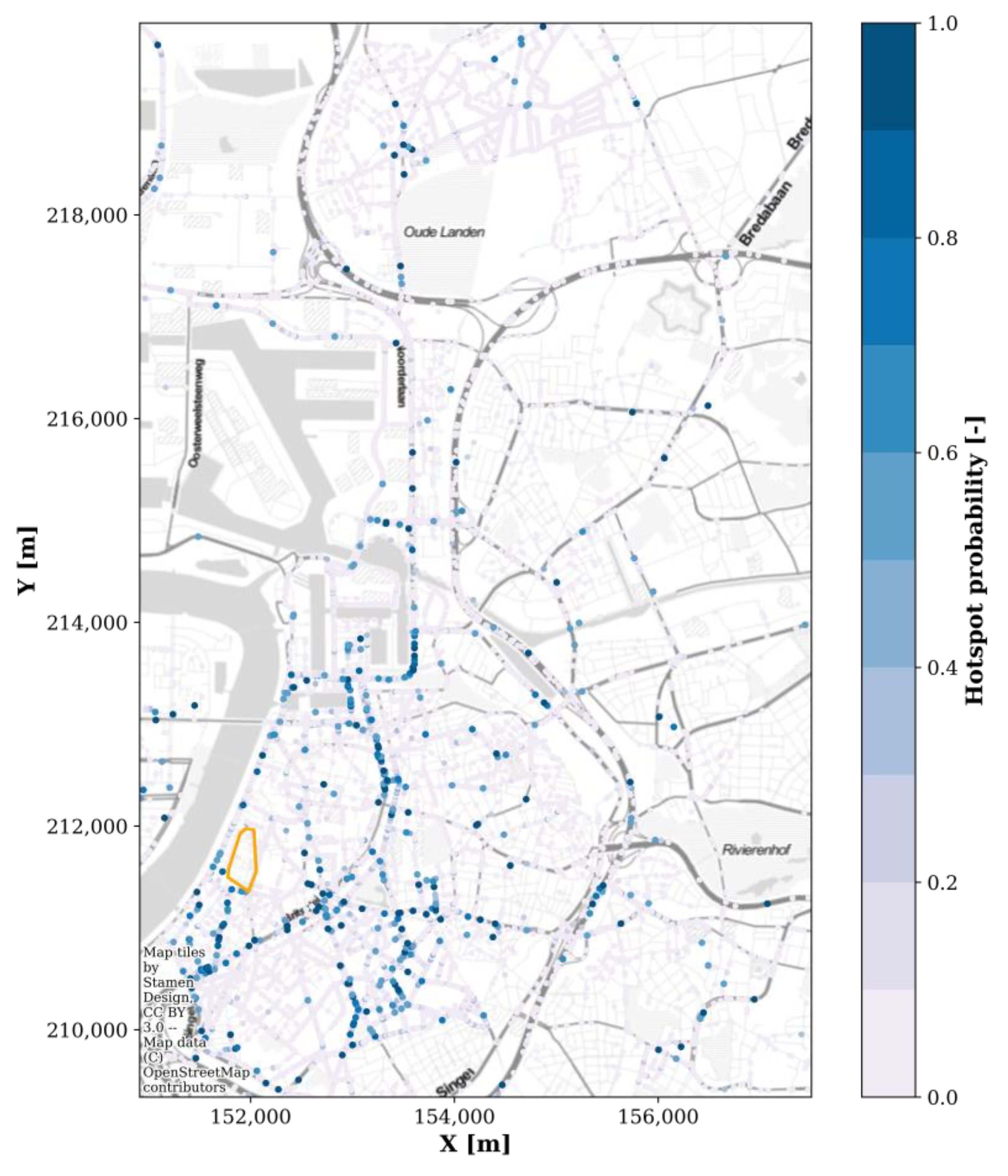
3.3. Identification of Hotspots in Mobile RF-EMF Sensor Network
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Eavg (V/m) | |||
|---|---|---|---|---|
| 900 MHz | 1800 MHz | 2100 MHz | 2400 MHz | |
| SRM-3006 | 0.24 | 0.15 | 0.10 | 0.03 |
| RF sensor EMF20 | 0.44 | 0.14 | 0.08 | 0.02 |
| Fixed RF sensors | 0.46 | 0.13 | 0.15 | 0.02 |
References
- Andreev, S.; Dobre, C. The Internet of Things and Sensor Networks. IEEE Commun. Mag. 2019, 57, 70. [Google Scholar] [CrossRef]
- Chiaraviglio, L.; Cacciapuoti, A.S.; Di Martino, G.; Fiore, M.; Montesano, M.; Trucchi, D.; Blefari-Melazzi, N. Planning 5G Networks Under EMF Constraints: State of the Art and Vision. IEEE Access 2018, 6, 51021–51037. [Google Scholar] [CrossRef]
- Dürrenberger, G.; Fröhlich, J.; Röösli, M.; Mattsson, M.O. EMF monitoring-concepts, activities, gaps and options. Int. J. Environ. Res. Public Health 2014, 11, 9460–9479. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- World Health Organization (WHO). Research Agenda for Radiofrequency Fields. Available online: https://apps.who.int/iris/handle/10665/44396 (accessed on 22 December 2021).
- Gotsis, A.; Papanikolaou, N.; Komnakos, D.; Yalofas, A.; Constantinou, P. Non-ionizing electromagnetic radiation monitoring in Greece. Ann. Telecommun. 2008, 63, 109–123. [Google Scholar] [CrossRef]
- Manassas, A.; Boursianis, A.; Samaras, T.; Sahalos, J.N. Continuous electromagnetic radiation monitoring in the environment: Analysis of the results in Greece. Radiat. Prot. Dosim. 2012, 151, 437–442. [Google Scholar] [CrossRef]
- Troisi, F.; Boumis, M.; Grazioso, P. The Italian national electromagnetic field monitoring network. Ann. Telecommun. 2008, 63, 97–108. [Google Scholar] [CrossRef]
- Oliveira, C.; Sebastiao, D.; Carpinteiro, G.; Correia, L.M.; Fernandes, C.A.; Serraiha, A.; Marques, N. The moniT Project: Electromagnetic Radiation Exposure Assessment in Mobile Communications. IEEE Antennas Propag. 2007, 49, 44–53. [Google Scholar] [CrossRef]
- Bolte, J.F.B.; Maslanyj, M.; Addison, D.; Mee, T.; Kamer, J.; Colussi, L. Do car-mounted mobile measurements used for radio-frequency spectrum regulation have an application for exposure assessments in epidemiological studies? Environ. Int. 2016, 86, 75–83. [Google Scholar] [CrossRef]
- Lemaire, T.; Wiart, J.; De Doncker, P. Variographic analysis of public exposure to electromagnetic radiation due to cellular base stations. Bioelectromagnetics 2016, 37, 557–562. [Google Scholar] [CrossRef] [Green Version]
- Carciofi, C.; Garzia, A.; Valbonesi, S.; Gandolfo, A.; Franchelli, R. RF electromagnetic field levels extensive geographical monitoring in 5G scenarios: Dynamic and standard measurements comparison. In Proceedings of the IEEE TEMS International Conference on Technology and Entrepreneurship (ICTE), Bologna, Italy, 20–23 September 2020. [Google Scholar] [CrossRef]
- Diez, L.; Agüero, R.; Muñoz, L. Electromagnetic field assessment as a smart city service: The SmartSantander use-case. Sensors 2017, 17, 1250. [Google Scholar] [CrossRef] [Green Version]
- Aerts, S.; Wiart, J.; Martens, L.; Joseph, W. Assessment of long-term spatio-temporal radiofrequency electromagnetic field exposure. Environ. Res. 2018, 161, 136–143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Diez, L.F.; Anwar, S.M.; de Lope, L.R.; Le Hennaff, M.; Toutain, Y.; Aguëro, R. Design and integration of a low-complexity dosimeter into the smart city for EMF assessment. In Proceedings of the European Conference on Networks and Communications (EuCNC), Bologna, Italy, 23–26 June 2014. [Google Scholar] [CrossRef]
- International Commission on Non-Ionizing Radiation Protection (ICNIRP). Guidelines for Limiting Exposure to Electromagnetic Fields (100 kHz to 300 GHz). Health Phys. 2020, 118, 483–524. [Google Scholar] [CrossRef] [PubMed]
- Podevijn, N.; Trogh, J.; Aernouts, M.; Berkvens, R.; Martens, L.; Weyn, M.; Joseph, W.; Plets, D. LoRaWAN Geo-Tracking Using Map Matching and Compass Sensor Fusion. Sensors 2020, 20, 5815. [Google Scholar] [CrossRef] [PubMed]
- Joseph, W.; Vermeeren, G.; Verloock, L.; Heredia, M.M.; Martens, L. Characterization of personal RF electromagnetic field exposure and actual absorption for the general public. Health Phys. 2008, 95, 317–330. [Google Scholar] [CrossRef]
- Aerts, S.; Deschrijver, D.; Verloock, L.; Dhaene, T.; Martens, L.; Joseph, W. Assessment of outdoor radiofrequency electromagnetic field exposure through hotspot localization using kriging-based sequential sampling. Environ. Res. 2013, 126, 184–191. [Google Scholar] [CrossRef] [Green Version]
- Aerts, S.; Verloock, L.; Van Den Bossche, M.; Colombi, D.; Martens, L.; Tornevik, C.; Joseph, W. In-Situ Measurement Methodology for the Assessment of 5G NR Massive MIMO Base Station Exposure at Sub-6 GHz Frequencies. IEEE Access 2019, 7, 184658–184667. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Silhouettes: A Graphical Aid to the Interpretation and Validation of Cluster Analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Bolte, J.F.B. Lessons learnt on biases and uncertainties in personal exposure measurement surveys of radiofrequency electromagnetic fields with exposimeters. Environ. Int. 2016, 94, 724–735. [Google Scholar] [CrossRef]
- Aerts, S.; Joseph, W.; Maslanyj, M.; Addison, D.; Mee, T.; Colussi, L.; Kamer, J.; Bolte, J. Prediction of RF-EMF exposure levels in large outdoor areas through car-mounted measurements on the enveloping roads. Environ. Int. 2016, 94, 482–488. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Wiart, J. Sensor-Aided EMF Exposure Assessments in an Urban Environment Using Artificial Neural Networks. Int. J. Environ. Res. Public Health 2020, 17, 3052. [Google Scholar] [CrossRef]
- Aminzadeh, R.; Thielens, A.; Agneessens, S.; Van Torre, P.; Van den Bossche, M.; Dongus, S.; Eeftens, M.; Huss, A.; Vermeulen, R.; de Seze, R.; et al. A multi-band body-worn distributed radio-frequency exposure meter: Design, on-body calibration and study of body morphology. Sensors 2018, 18, 272. [Google Scholar] [CrossRef] [PubMed] [Green Version]








| Parameter | Value |
|---|---|
| Frequency Range | 925–2484 MHz |
| ‘900 MHz’: 925–960 MHz |
| ‘1800 MHz’: 1805–1880 MHz |
| ‘2100 MHz’: 2110–2170 MHz |
| ‘2400 MHz’: 2400–2484 MHz |
| Sensitivity level | 0.02 V/m |
| Dimensions (L × W × H) | 18 × 18 × 15 cm3 |
| Dynamic range | 70 dB |
| Supply voltage | 5 VDC USB power |
| Power consumption | Max. 150 mA (0.75 W) |
| Output sampling time Δs | 1000 ms |
| Internal sampling time | 5 ms |
| Output format fixed nodes | ASCII UART serial output at 9600 baud |
| Output format mobile nodes | I2C ASCII output |
| Node ID | Number of 30 s Samples | Temporal Coverage (%) | 99% Interval of E30s (V/m) | |||
|---|---|---|---|---|---|---|
| 900 MHz | 1800 MHz | 2100 MHz | 2400 MHz | |||
| EMF08 * | 508,398 | 37.09 | 0.19–0.40 | 0.05–0.62 | 0.10–0.20 | 0.02–0.03 |
| EMF09 * | 280,823 | 20.48 | 0.13–0.60 | 0.06–0.32 | 0.08–0.19 | 0.02–0.03 |
| EMF10 | 323,434 | 23.59 | 0.20–0.28 | 0.11–0.25 | 0.07–0.17 | 0.03–0.04 |
| EMF11 | 145,647 | 10.62 | 0.12–0.22 | 0.06–0.31 | 0.06–0.17 | 0.03–0.03 |
| EMF12 | 1,127,490 | 82.25 | 0.12–0.31 | 0.03–0.18 | 0.06–0.23 | 0.03–0.04 |
| EMF13 | 1,307,392 | 95.37 | 0.35–0.75 | 0.17–0.63 | 0.07–0.13 | 0.03–0.04 |
| EMF17 | 922,189 | 67.27 | 0.05–0.13 | 0.03–0.11 | 0.02–0.05 | 0.03–0.06 |
| EMF18 | 1,047,889 | 76.44 | 0.19–0.41 | 0.03–0.21 | 0.04–0.19 | 0.03–0.03 |
| EMF19 | 1,105,401 | 80.63 | 0.10–0.22 | 0.02–0.11 | 0.03–0.07 | 0.03–0.03 |
| EMF21 | 1,321,186 | 96.38 | 0.03–0.10 | 0.03–0.12 | 0.02–0.06 | 0.03–0.03 |
| Avg. | 808,985 | 59.01 | 0.17–0.39 | 0.08–0.34 | 0.06–0.16 | 0.03–0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aerts, S.; Vermeeren, G.; Van den Bossche, M.; Aminzadeh, R.; Verloock, L.; Thielens, A.; Leroux, P.; Bergs, J.; Braem, B.; Philippron, A.; et al. Lessons Learned from a Distributed RF-EMF Sensor Network. Sensors 2022, 22, 1715. https://doi.org/10.3390/s22051715
Aerts S, Vermeeren G, Van den Bossche M, Aminzadeh R, Verloock L, Thielens A, Leroux P, Bergs J, Braem B, Philippron A, et al. Lessons Learned from a Distributed RF-EMF Sensor Network. Sensors. 2022; 22(5):1715. https://doi.org/10.3390/s22051715
Chicago/Turabian StyleAerts, Sam, Günter Vermeeren, Matthias Van den Bossche, Reza Aminzadeh, Leen Verloock, Arno Thielens, Philip Leroux, Johan Bergs, Bart Braem, Astrid Philippron, and et al. 2022. "Lessons Learned from a Distributed RF-EMF Sensor Network" Sensors 22, no. 5: 1715. https://doi.org/10.3390/s22051715
APA StyleAerts, S., Vermeeren, G., Van den Bossche, M., Aminzadeh, R., Verloock, L., Thielens, A., Leroux, P., Bergs, J., Braem, B., Philippron, A., Martens, L., & Joseph, W. (2022). Lessons Learned from a Distributed RF-EMF Sensor Network. Sensors, 22(5), 1715. https://doi.org/10.3390/s22051715