
CCAIB: Congestion Control Based on Adaptive Integral Backstepping for Wireless Multi-Router Network




Abstract
:1. Introduction
- A wireless network model is introduced, in which a serial topology is considered and the interrelationships between connecting routers is formulated.
- The adaptive control theory is applied to estimate the packet loss ratios of the uplink and downlink. Based on the estimation, a novel congestion control algorithm called CCAIB is designed using the integral backstepping procedure. Different from the previous work for wired networks, the packet loss ratios of the wireless links are taken into account.
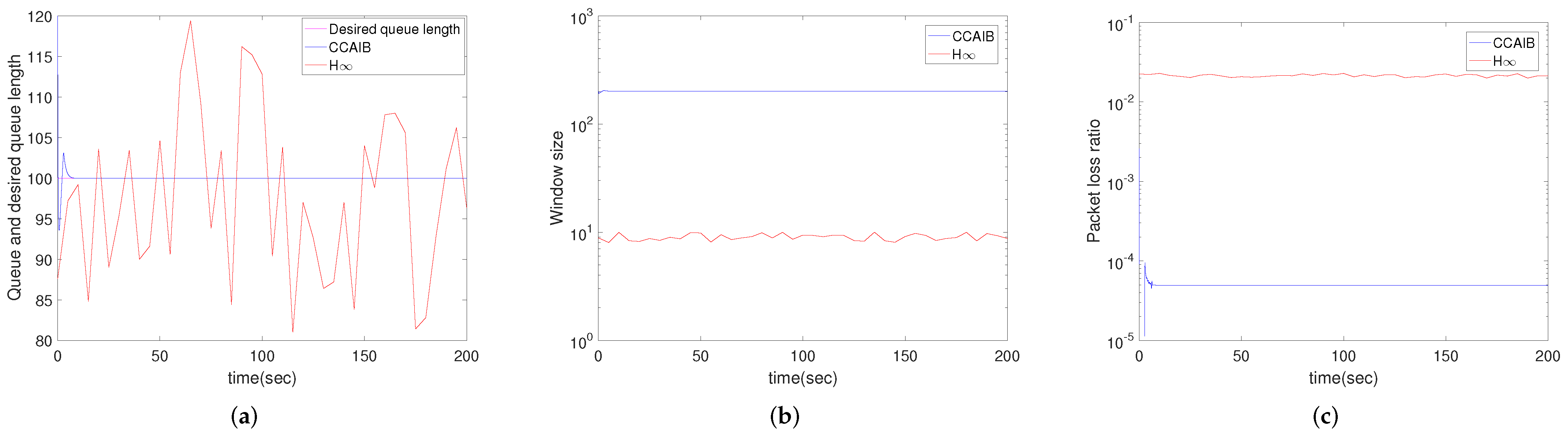
- Comparison is conducted between CCAIB and H∞ in the performance of queue length stability, window size and packet loss ratio in the queue.
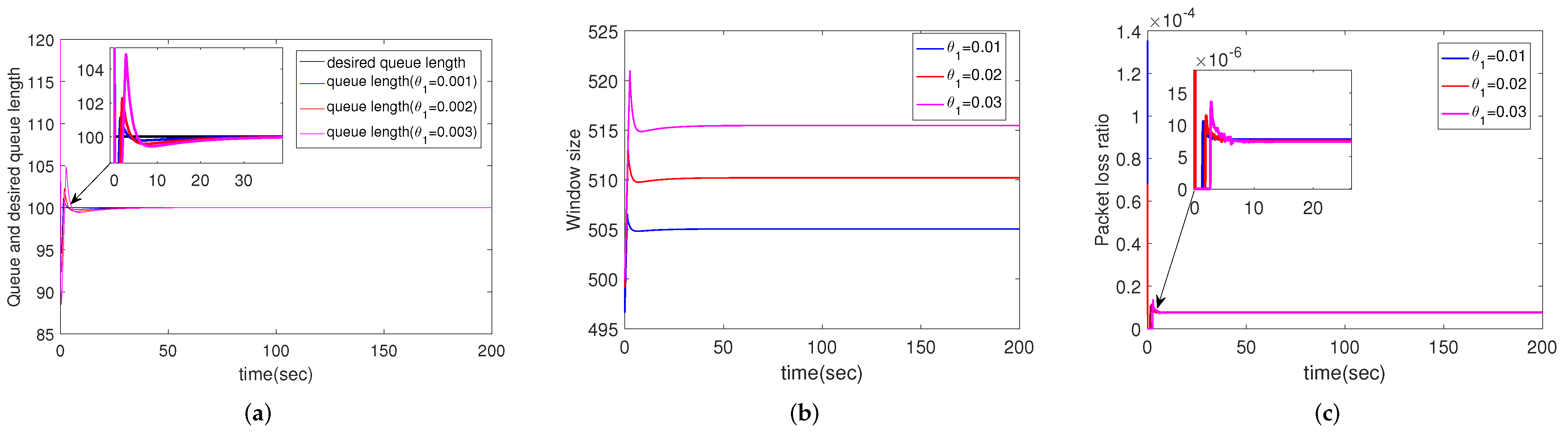
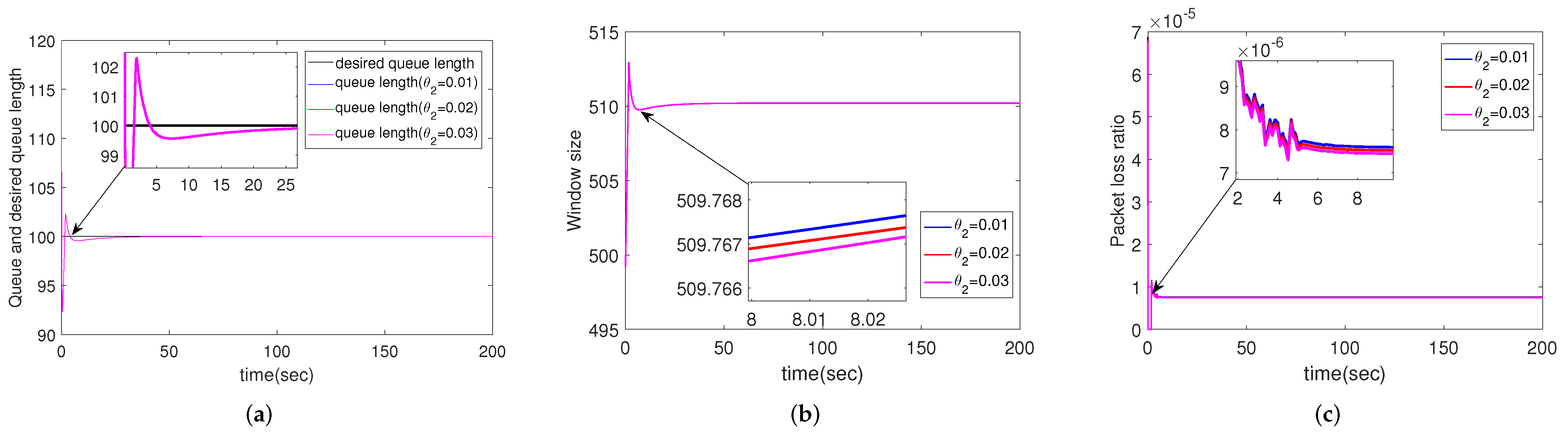
- The influence of network parameters such as link capacity, propagation delay, wireless packet loss ratios, desired queue length and router location on the performance of CCAIB are analyzed.
2. Congestion Control Model for Wireless Multi-Router Networks
3. CCAIB Algorithm
4. Performance Evaluation
4.1. Network Topology and Parameters
4.2. Results and Analysis
4.2.1. Comparison between CCAIB and H∞ Algorithm
4.2.2. Simulation Results for Different Link Capacity
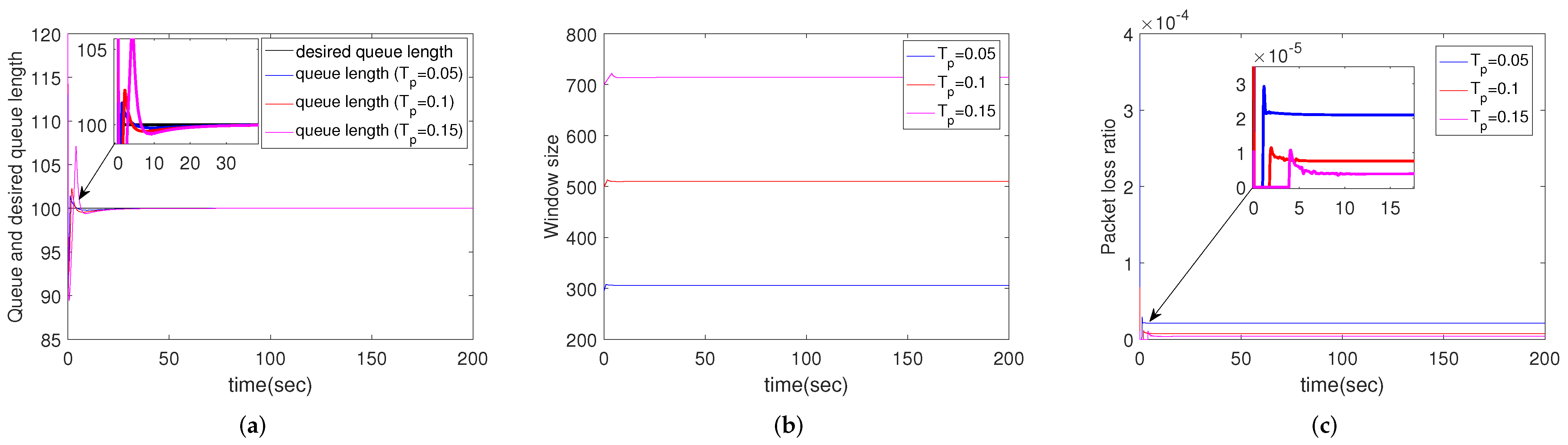
4.2.3. Simulation Results for Different Propagation Delays
4.2.4. Simulation Results for Different Packet Loss Ratios of Uplink
4.2.5. Simulation Results for Different Packet Loss Ratios of Downlink
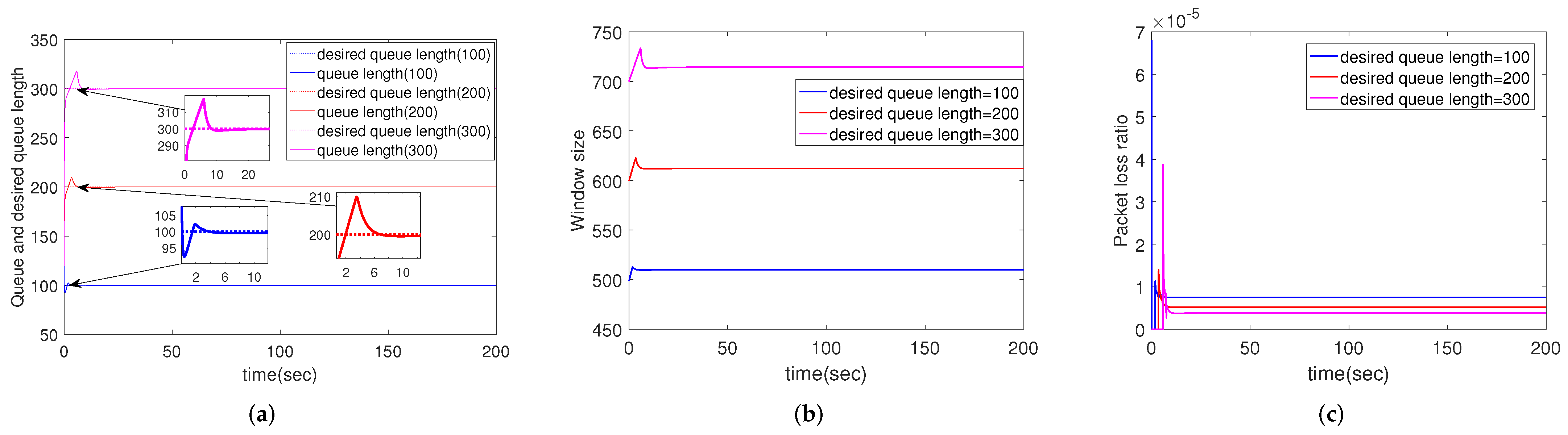
4.2.6. Simulation Results for Different Desired Queue Length
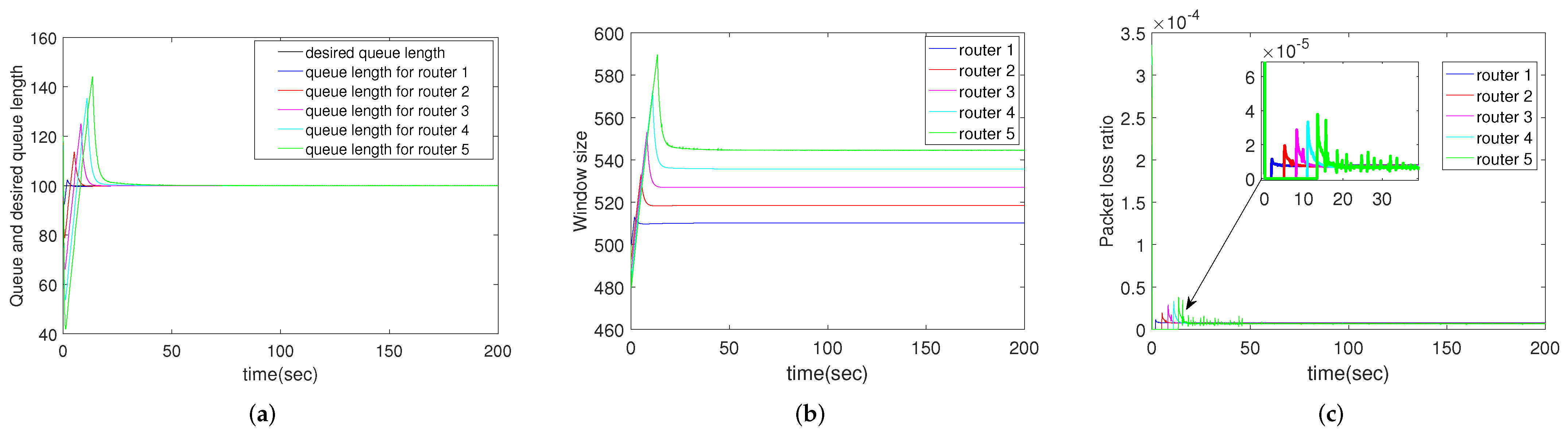
4.2.7. Simulation Results for Different Routers
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brakmo, L.S.; Peterson, L.L. Tcp vegas: End to end congestion avoidance on a global internet. IEEE J. Sel. Areas Commun. 1995, 13, 1465–1480. [Google Scholar] [CrossRef] [Green Version]
- Floyd, S.; Henderson, T.T.; Gurtovand, A. The Newreno Modification to Tcp’s Fast Recovery Algorithm; RFC 3782; RFC Editor: Marina del Rey, CA, USA, 1999; pp. 1–20. [Google Scholar]
- Ha, S.; Rhee, I.; Xu, L.S. Cubic: A new tcp-friendly high-speed tcp variant. ACM SIGOPS Oper. Syst. Rev. 2008, 5, 64–74. [Google Scholar] [CrossRef]
- Cardwell, N.; Cheng, Y.C.; Gunn, C.S.; Yeganeh, S.-H.; Jacobson, V. Bbr: Congestion-based congestion control. Commun. ACM 2017, 2, 58–66. [Google Scholar] [CrossRef] [Green Version]
- Winstein, K.; Balakrishnan, H. Tcp ex machina: Computer-generated congestion control. In Proceedings of the ACM SIGCOMM’13, Hong Kong, China, 12–16 August 2013; pp. 123–134. [Google Scholar]
- Kim, J.-H.; Yeom, I. Reducing queue oscillation at a congested link. IEEE Trans. Parallel Distrib. Syst. 2008, 3, 394–407. [Google Scholar]
- Crowcroft, J.; Davie, B.; Deering, S.; Systems, C.; Estrin, D.; Floyd, S.; Jacobson, V.; Minshall, G.; Partridge, C.; Peterson, L.; et al. Recommendation on Queue Management and Congestion Avoidance in the Internet; RFC 2309; RFC Editor: Marina del Rey, CA, USA, 1998. [Google Scholar]
- Floyd, S.; Jacobson, V. Random early detection gateways for congestion avoidance. IEEE/ACM Trans. Netw. 1993, 4, 397–413. [Google Scholar] [CrossRef]
- Floyd, S.; Gummadi, R.; Shenker, S. Adaptive Red: An Algorithm for Increasing the Robustness of Red’s Active Queue Management; Technical Report; AT&T Center for Internet Research at ICSI: Berkeley, CA, USA, 2001; pp. 1–12. [Google Scholar]
- OttT, T.J.; Lakshman, V.; Wong, L.H. Sred: Stabilized red. In Proceedings of the 8th Annual Joint Conference of the IEEE Computer and Communications Societies, New York, NY, USA, 21–25 March 1999; pp. 1346–1355. [Google Scholar]
- Lin, D.; Morris, R. Dynamics of random early detection. ACM SIGCOMM Comput. Commun. Rev. 1997, 4, 127–137. [Google Scholar] [CrossRef]
- Aweya, J.; Ouellette, M.; Montuno, D.Y. An optimization-oriented view of random early detection. Comput. Commun. 2001, 12, 1170–1187. [Google Scholar] [CrossRef]
- Floyd, S.; Fall, K. Promoting the use of end-to-end congestion control in the internet. IEEE/ACM Trans. Netw. 2001, 4, 458–472. [Google Scholar] [CrossRef]
- Aweya, J.; Ouellette, M.; Montuno, D.Y.; Chapman, A. Enhancing tcp performance with a load-adaptive red mechanism. Int. J. Netw. Manag. 2010, 1, 31–50. [Google Scholar] [CrossRef]
- Zhou, K.; Yeung, K.L.; Li, V.O.K. Nonlinear red: A simple yet efficient active queue management scheme. Comput. Netw. 2006, 18, 3784–3794. [Google Scholar] [CrossRef]
- Christiansen, M.; Jeffay, K.; Ott, D.; Smith, F.D. Newblock Tuning red for web traffic. IEEE/ACM Trans. Netw. 2001, 3, 249–264. [Google Scholar] [CrossRef]
- Nichols, K.; Jacobson, V. Controlling queue delay. Commun. ACM 2012, 7, 42–50. [Google Scholar] [CrossRef]
- Pan, R.; Natarajan, P.; Piglione, C.; Prabhu, M.S.; Subramanian, V.; Baker, F.; Versteeg, B. Pie: A lightweight control scheme to address the bufferbloat problem. In Proceedings of the IEEE 14th International Conference on High Performance Switching and Routing, Taipei, Taiwan, 8–11 July 2013; pp. 148–155. [Google Scholar]
- Misra, V.; Gong, W.B.; Towsley, D. Fluid-based analysis of a network of aqm routers supporting tcp flows with an application to red. ACM Sigcomm Stockh. Swed. 2000, 4, 151–160. [Google Scholar] [CrossRef]
- Yang, H.; Yang, O.W.W.; Huang, C. Self-tuning pi tcp flow controller for aqm routers with interval gain and phase margin assignment. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM’04), Dallas, TX, USA, 1–3 December 2004; pp. 1324–1328. [Google Scholar]
- Sun, J.; Chen, G.; Ko, K.T.; Chan, S.; Zukerman, M. Pd-controller: A new active queue management scheme. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM’03), San Francisco, CA, USA, 1–5 December 2003; pp. 3103–3107. [Google Scholar]
- Bisoy, S.K.; Pattnaik, P.K. Design of feedback controller for tcp/aqm networks. Eng. Sci. Technol. Int. J. 2017, 4, 116–132. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; He, J.W.; Chen, Q.W. A robust active queue management scheme for network congestion control. Comput. Electr. Eng. 2013, 2, 285–294. [Google Scholar] [CrossRef]
- Wang, D.; Yu, H.; Jing, Y.W.; Jiang, N.; Zhang, S.Y. Study on the congestion in complex network based on traffic awareness algorithm. Acta Phys. Sin. 2009, 10, 6802–6808. [Google Scholar] [CrossRef]
- Wang, K.; Jing, Y.W.; Liu, Y.; Liu, X.; Dimirovski, G.M. Adaptive finite-time congestion controller design of tcp/aqm systems based on neural network and funnel control. Neural Comput. Appl. 2020, 13, 9471–9478. [Google Scholar] [CrossRef]
- Mohammadi, S.; Pour, H.M.; Jafari, M.; Javadi, A. Fuzzy-based pid active queue manager for tcp/ip networks. In Proceedings of the 10th International Conference on Information Sciences Signal Processing and Their Applications, Kuala Lumpur, Malaya, 10 May 2010; pp. 434–439. [Google Scholar]
- Bigdeli, N.; Haeri, M. Predictive functional control for active queue management in congested tcp/ip networks. ISA Trans. 2009, 1, 107–121. [Google Scholar] [CrossRef]
- Predictive, L.; Liu, X.Z.; Salmasi, F.R. Predictive sliding-mode congestion control for wireless access networks with singular and non-singular control gain. IET Control Theory Appl. 2020, 13, 1722–1732. [Google Scholar]
- Han, C.W.; Li, M.Q.; Jing, Y.W.; Liu, L.; Pang, Z.H.; Sun, D.H. Nonlinear model predictive congestion control for networks. IFAC Pap. Online 2017, 1, 552–557. [Google Scholar] [CrossRef]
- Kunniyur, S.S.; Srikant, R. An adaptive virtual queue algorithm for active queue management. IEEE/ACM Trans. Netw. 2004, 2, 286–299. [Google Scholar] [CrossRef]
- Deng, X.; Yi, S.W.; Kesidis, G.; Das, C.R. Stabilized virtual buffer(svb)—An active queue management scheme for internet quality-of-service. In Proceedings of the IEEE Global Telecommunications Conference, Taipei, Taiwan, 17–21 November 2002; pp. 1628–1632. [Google Scholar]
- Athuraliya, S.; Li, V.H.; Low, S.H.; Yin, Q. Rem: Active queue management. Teletraffic Sci. Eng. 2001, 4, 817–828. [Google Scholar]
- Wang, N.; Sun, J.C.; Han, M.; Zheng, Z.; Er, M.J. Adaptive approximation based regulation control for a class of uncertain nonlinear systems without feedback linearizability. IEEE Trans. Neural Netw. Learn. Syst. 2018, 8, 3747–3760. [Google Scholar]
- Zheng, X.L.; Yang, X.B. Improved adaptive nn backstepping control design for a perturbed pvtol aircraft. Neurocomputing 2020, 410, 51–60. [Google Scholar] [CrossRef]
- Hua, C.C.; Gang, F.; Guan, X.P. Robust controller design of a class of nonlinear time delay systems via backstepping method. Automatica 2008, 2, 567–573. [Google Scholar] [CrossRef]
- Jeon, B.J.; Seo, M.G.; Shin, H.S.; Tsourdos, A. Understandings of classical and incremental backstepping controllers with model uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2020, 4, 2628–2641. [Google Scholar] [CrossRef] [Green Version]
- Chehardoli, H.; Noroozi, Z. Time optimal paths and acceleration lines of robotic manipulators. In Proceedings of the 7th International Conference on Control Instrumentation, and Automation, Tabriz, Iran, 23–24 February 2021; pp. 30–35. [Google Scholar]
- Zheng, X.Y.; Zhang, H.; Yan, H.C.; Yang, F.W.; Wang, Z.P.; Vlacic, L. Active full-vehicle suspension control via cloud-aided adaptive backstepping approach. IEEE Trans. Cybern. 2020, 7, 3113–3124. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.P.; Jing, Y.W.; Zhou, S.W. Adaptive backstepping H∞ tracking control with prescribed performance for internet congestion. ISA Trans. 2018, 72, 92–99. [Google Scholar] [CrossRef]
- Li, Z.H.; Liu, Y.; Jing, Y.W. Active queue management algorithm for tcp networks with integral backstepping and minimax. Int. J. Control Autom. Syst. 2019, 7, 1059–1066. [Google Scholar] [CrossRef]
- Lin, M.N.; Ren, T.; Yuan, H.W.; Li, M. The congestion control for tcp network based on input/output saturation. In Proceedings of the 29th Chinese Control and Decision Conference, Chongqing, China, 28–30 May 2017; pp. 1166–1171. [Google Scholar]
- Li, Z.H.; Liu, Y.; Jing, Y.W. Design of adaptive backstepping congestion controller for tcp networks with udp flows based on minimax. ISA Trans. 2019, 95, 27–34. [Google Scholar] [CrossRef]
- Jing, Y.W.; Li, Z.H.; Dimirovski, G.; Mastorakis, N.; Mladenov, V.; Bulucea, A. Minimax based congestion control for tcp network systems with udp flows. In Proceedings of the MATEC Web of Conferences, Majorca, Spain, 14–17 July 2018; pp. 1–7. [Google Scholar]
- Wang, K.; Jing, Y.W.; Zhang, S.Y.; Dimirovski, G.M. Hamiltonian theory applied to ameliorate the complexity of tcp network congestion control. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Banff, AB, Canada, 5–8 October 2017. [Google Scholar]
- Yang, X.H.; Wang, Z.Q. Nofc-vrtt:nonlinear aqm algorithm based on variable rtt. Control Decis. 2010, 1, 69–73. [Google Scholar]
- Zheng, X.P.; Zhang, N.N.; Dimirovski, M.G.; Jing, Y.W. Adaptive sliding mode congestion control for diffserv network. Ifac Proc. Vol. 2008, 2, 12983–12987. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Liu, X.P.; Jing, Y.W.; Zhang, Z.Y.; Chen, X.Y. Congestion tracking control for uncertain tcp/aqm network based on integral backstepping. ISA Trans. 2019, 89, 131–138. [Google Scholar] [CrossRef] [PubMed]
- Shah-Mansouri, V.; Abolfazli, E. Dynamic adjustment of queue levels in tcp vegas-based networks. Electron. Lett. 2016, 5, 361–363. [Google Scholar]
- Wang, K.; Liu, Y.; Liu, X.P.; Jing, Y.W.; Zhang, S.Y. Adaptive fuzzy funnel congestion control for tcp/aqm network. ISA Trans. 2019, 52, 11–17. [Google Scholar] [CrossRef]
- Bauso, D.; Giarre, L.; Neglia, G. Active queue management stability in multiple bottleneck networks. In Proceedings of the 1st International Symposium on Control, Communications and Signal Processing, Hammamet, Tunisia, 27 September 2004; pp. 369–372. [Google Scholar]
- Wang, L.C.; Cai, L.; Liu, X.Z.; Shen, S.; Zhang, J.S. Stability analysis of multiple-bottleneck networks. Comput. Netw. 2009, 3, 338–352. [Google Scholar] [CrossRef] [Green Version]
- Alaoui, S.B.; Houssaine, E.; Chaibi, N. New design of anti-windup and dynamic output feedback control for tcp/aqm system with asymmetrical input constraints. Int. J. Syst. Sci. 2021, 9, 1822–1834. [Google Scholar] [CrossRef]
- Zheng, F.; Nelson, J. A H∞ approach to congestion control design for aqm routers supporting tcp flows in wireless access networks. Comput. Netw. 2007, 6, 1684–1704. [Google Scholar] [CrossRef]
- Qian, Y.P.; Hu, W.K.; Lin, X.Z.; Wang, B. Fractional order proportional integral controller for active queue management of wireless network. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 21–24 July 2011; pp. 4406–4410. [Google Scholar]
- Yang, J.; Lim, D.K.; Oh, W.G. Lq-servo congestion control for tcp/aqm system in wireless network environment. Int. J. Control Autom. 2013, 3, 281–290. [Google Scholar]
- Ma, L.; Liu, X.; Wang, H.; Zhou, Y. Congestion tracking control for wireless tcp/aqm network based on adaptive integral backstepping. Int. J. Control Autom. Syst. 2020, 9, 2289–2296. [Google Scholar] [CrossRef]
- Xiao, X. Technical, Commercial and Regulatory Challenges of Qos-an Internet Service Model Perspective; Morgan Kaufmann: San Francisco, CA, USA, 2008; pp. 201–223. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meanings | Ranges |
|---|---|---|
| Window size | ||
| Queue length | ||
| RTT | ||
| Queue packet loss ratio | ||
| Link capacity | ||
| Propagation time | ||
| M | Number of congestion routers | |
| Packet loss ratio of downlink before router i | ||
| Packet loss ratio of uplink before router i |
| Case | Link Capacity | Delay | Packet Loss Ratio |
|---|---|---|---|
| 1 | 1000 packets/s | 100 ms | 0.005 |
| 2 | 3000 packets/s | 100 ms | 0.005 |
| 3 | 1000 packets/s | 100 ms | 0.05 |
| 4 | 3000 packets/s | 100 ms | 0.05 |
| Router location | Router 1 |
|---|---|
| Link capacity | 4000 packets/s |
| Propagation delay | 100 ms |
| Wireless packet loss ratio | 0.02 |
| Desired queue length | 100 packets |
| Parameters | Values | Remark |
|---|---|---|
| 10 | ||
| 10 | ||
| 10 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, X.; Ma, L.; Liu, X. CCAIB: Congestion Control Based on Adaptive Integral Backstepping for Wireless Multi-Router Network. Sensors 2022, 22, 1818. https://doi.org/10.3390/s22051818
Deng X, Ma L, Liu X. CCAIB: Congestion Control Based on Adaptive Integral Backstepping for Wireless Multi-Router Network. Sensors. 2022; 22(5):1818. https://doi.org/10.3390/s22051818
Chicago/Turabian StyleDeng, Xiaoping, Lujuan Ma, and Xiaoping Liu. 2022. "CCAIB: Congestion Control Based on Adaptive Integral Backstepping for Wireless Multi-Router Network" Sensors 22, no. 5: 1818. https://doi.org/10.3390/s22051818
APA StyleDeng, X., Ma, L., & Liu, X. (2022). CCAIB: Congestion Control Based on Adaptive Integral Backstepping for Wireless Multi-Router Network. Sensors, 22(5), 1818. https://doi.org/10.3390/s22051818