
Wireless Communication Test on 868 MHz and 2.4 GHz from inside the 18650 Li-Ion Enclosed Metal Shell




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Health Monitoring in Energy Storage
1.2. Contribution and Paper Organization
2. Methodology
2.1. Experimental Setup
- An empty metal shell is constructed from nickel-plated cold-rolled steel, which is also used for the full Li-ion cell [37], including every element of its geometry.
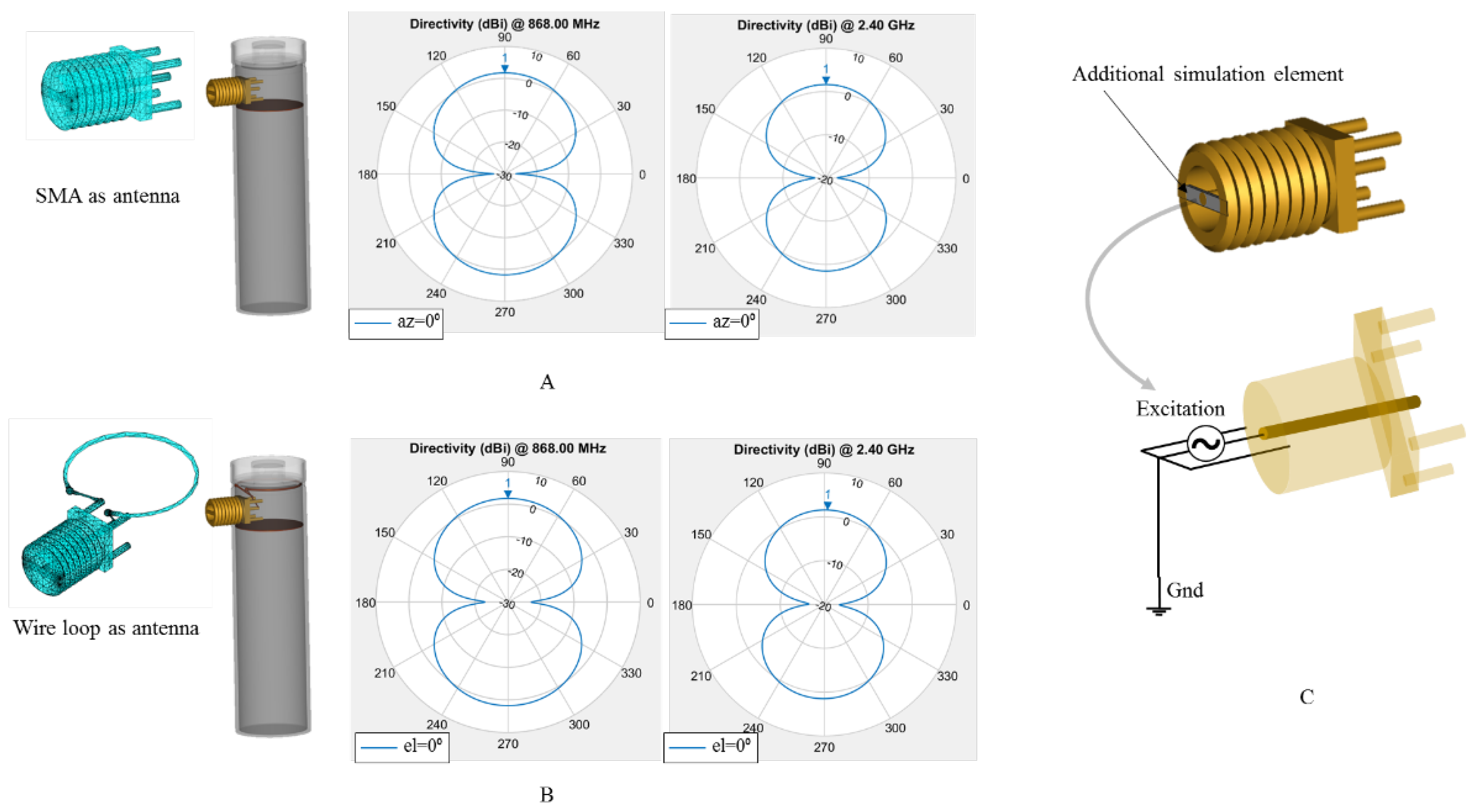
- The radiative structures placed inside the cell’s metal shell, such as the SMA connector and the wire loop, are generic and not tuned or optimised for the specific selected frequencies of 868 MHz and 2.4 GHz.
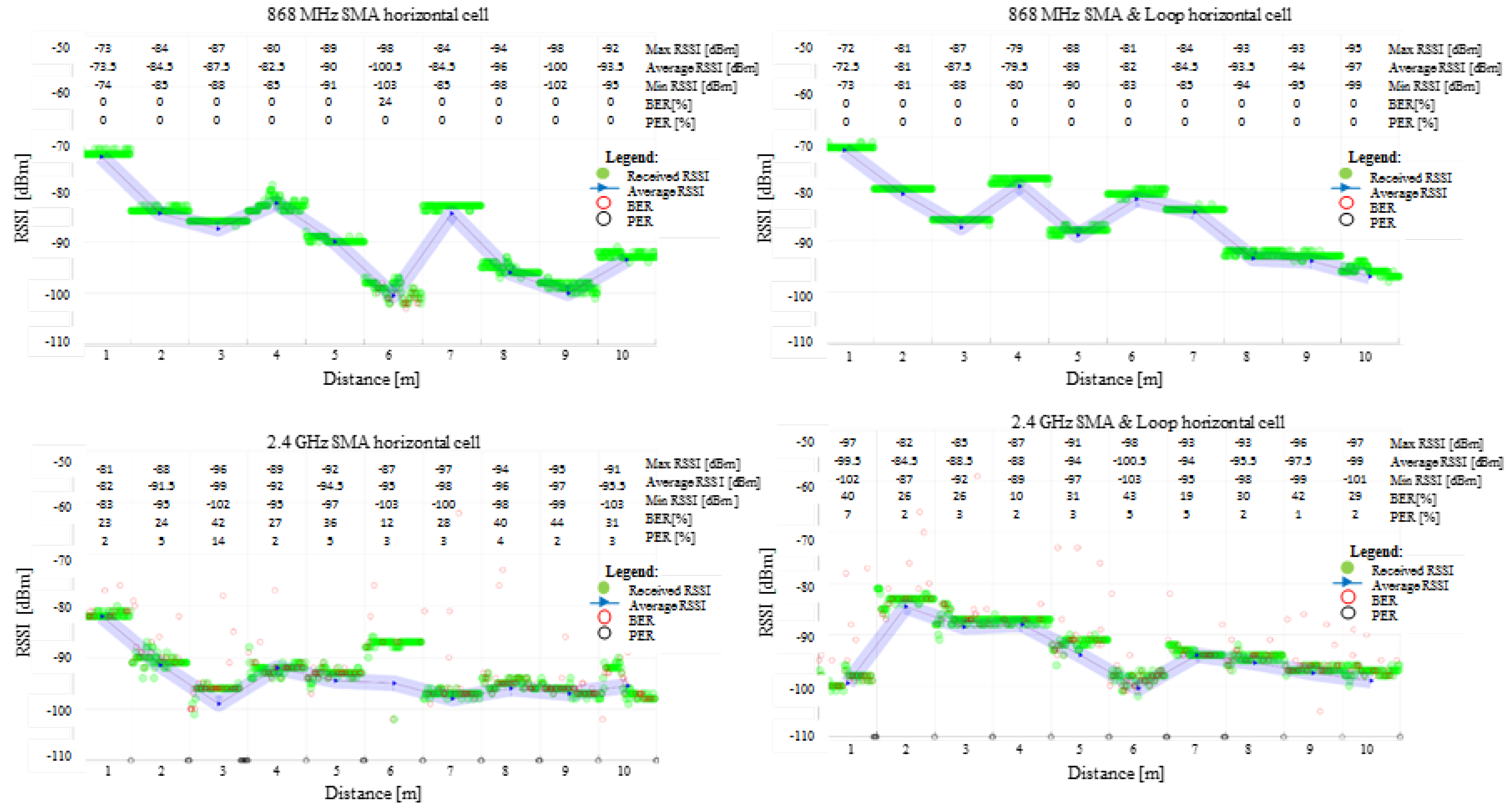
- Using GFSK modulation on IEEE 802.15.4, a large payload of 120 bytes is transmitted with Tx power set to 0 dBm one hundred times at each test point, whereas employing the highest data rate supported by the utilised communication standard of 150 kbps for 868 MHz and 250 kbps for 2.4 GHz [38].
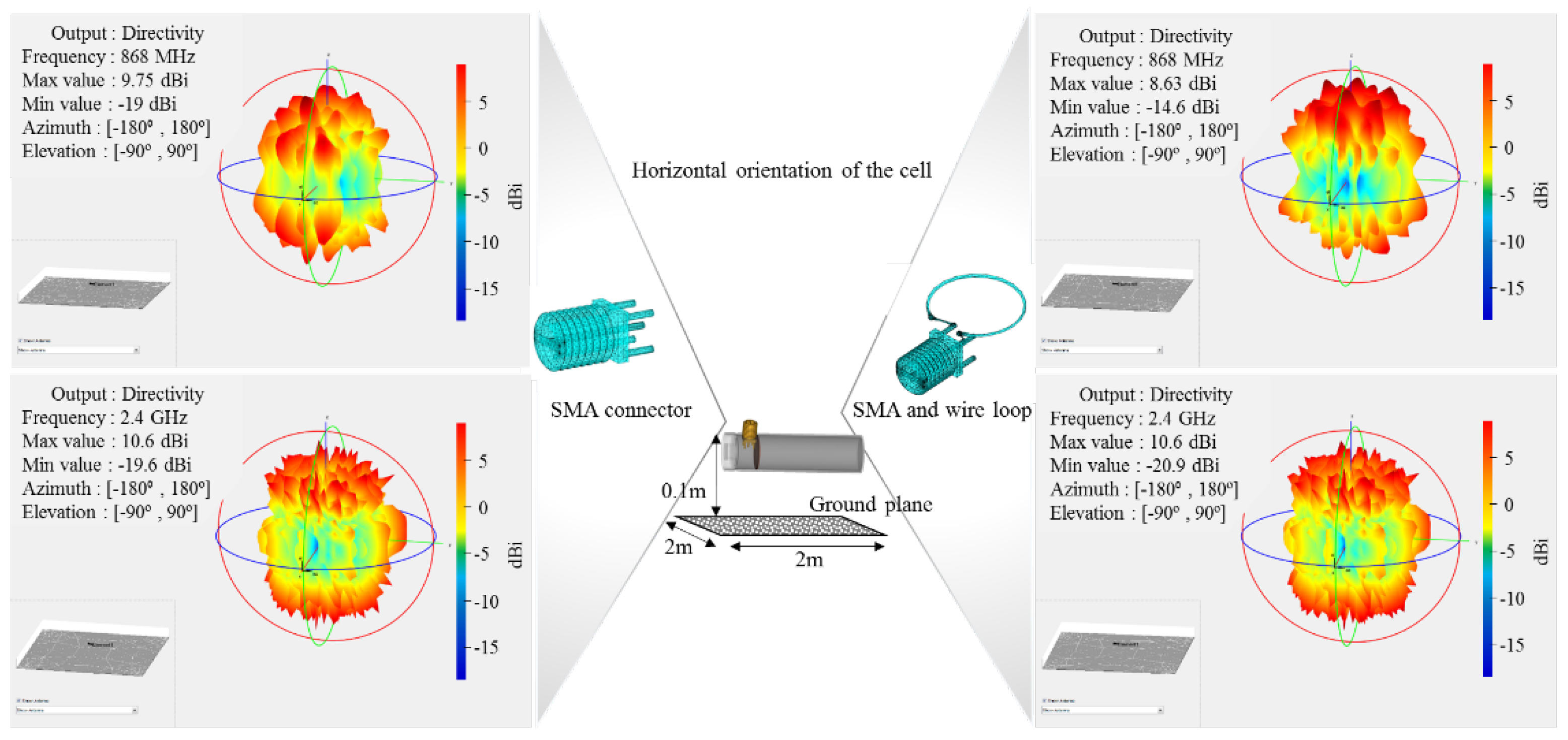
2.2. Simulation Setup
3. Results and Discussion
3.1. Empirical Experimental Results
3.2. Simulation Results
4. Conclusions and Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thomas, F.L.; Guenter, S.; Guenter, H.; Rose, M.; Jossen, A. Power Line Communications for Automotive High Voltage Battery Systems: Channel Modeling and Coexistence Study with Battery Monitoring. Energies 2021, 14, 1851. [Google Scholar]
- Timothy, A.V.; Begum, G.; EH, S.J.; James, M. Development of an in-vehicle power line communication network with in-situ instrumented smart cells. Transp. Eng. 2021, 6, 100098. [Google Scholar]
- Koshkouei, M.J.; Kampert, E.; Moore, A.D.; Higgins, M.D. Evaluation of an in situ QAM-based Power Line Communication system for lithium-ion batteries. IET Electr. Syst. Transp. 2021, 1–11. [Google Scholar] [CrossRef]
- Gozdur, R.; Przerywacz, T.; Bogdański, D. Low Power Modular Battery Management System with a Wireless Communication Interface. Energies 2021, 14, 6320. [Google Scholar] [CrossRef]
- Mattia, R.; Meng, J.; Gherman, T.; Grandi, G.; Teodorescu, R. Smart battery pack for electric vehicles based on active balancing with wireless communication feedback. Energies 2019, 12, 3862. [Google Scholar]
- Huang, L.T.; Ha, D.S.; Cho, H. Low Power Design of a Wireless Sensor Node to Monitor Electric Car Batteries. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3045–3050. [Google Scholar]
- Mathew, S.A.; Prakash, R.; John, P.C. A smart wireless battery monitoring system for Electric Vehicles. In Proceedings of the 2012 12th International Conference on Intelligent Systems Design and Applications (ISDA), Kochi, India, 27–29 November 2012; pp. 189–193. [Google Scholar]
- Alapati, S.V.; Nadella, I.; Bobba, P.B.; Upadhayay, M.D. Development of wireless charging system along with power line communication used in Electric Vehicles. E3S Web Conf. 2019, 87, 1021. [Google Scholar] [CrossRef] [Green Version]
- Lidiya, K.; Buchberger, T.; Diehl, S.; Ehrensberger, M.; Hanzl, C.; Hartmann, C.; Hölzle, M.; Kleiner, J.; Lewerenz, M.; Liebhart, B.; et al. Critical review of intelligent battery systems: Challenges, implementation, and potential for electric vehicles. Energies 2021, 14, 5989. [Google Scholar]
- Fleming, J.; Amietszajew, T.; McTurk, E.; Towers, D.P.; Greenwood, D.; Bhagat, R. Development and evaluation of in-situ instrumentation for cylindrical Li-ion cells using fibre optic sensors. HardwareX 2018, 3, 100–109. [Google Scholar] [CrossRef]
- Rente, B.; Fabian, M.; Vidakovic, M.; Liu, X.; Li, X.; Li, K.; Sun, T.; Grattan, K.T. V Lithium-Ion battery state-of-charge estimator based on FBG-based strain sensor and employing machine learning. IEEE Sens. J. 2020, 21, 1453–1460. [Google Scholar] [CrossRef]
- Fleming, J.; Amietszajew, T.; Charmet, J.; Roberts, A.J.; Greenwood, D.; Bhagat, R. The design and impact of in-situ and operando thermal sensing for smart energy storage. J. Energy Storage 2019, 22, 36–43. [Google Scholar] [CrossRef]
- Jichao, H.; Wang, Z.; Ma, F.; Yang, J.; Xu, X.; Qu, C.; Zhang, J.; Shan, T.; Hou, Y.; Zhou, Y. Thermal Runaway Prognosis of Battery Systems Using the Modified Multi-Scale Entropy in Real-World Electric Vehicles. IEEE Trans. Transp. Electrif. 2021, 7, 2269–2278. [Google Scholar]
- Amietszajew, T.; Fleming, J.; Roberts, A.J.; Widanage, W.D.; Greenwood, D.; Kok, M.D.R.; Pham, M.; Brett, D.J.L.; Shearing, P.R.; Bhagat, R. Hybrid thermo-electrochemical In Situ instrumentation for lithium-ion energy storage. Batter. Supercaps 2019, 2, 934–940. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Wang, Y.; Yung, W.K.C.; Pecht, M. Ultrasonic health monitoring of lithium-ion batteries. Electronics 2019, 8, 751. [Google Scholar] [CrossRef] [Green Version]
- Surya, S.; Rao, V.; Williamson, S.S. Comprehensive Review on Smart Techniques for Estimation of State of Health for Battery Management System Application. Energies 2021, 14, 4617. [Google Scholar] [CrossRef]
- Amietszajew, T.; McTurk, E.; Fleming, J.; Bhagat, R. Understanding the limits of rapid charging using instrumented commercial 18650 high-energy Li-ion cells. Electrochim. Acta 2018, 263, 346–352. [Google Scholar] [CrossRef]
- Mohammed, A.-S.; Bartosz, P.; Maciej, Z.; Karwat, A.; Pol, M.; Chełchowski, Ł.; Van Mierlo, J.; Berecibar, M. Slow and Fast Charging Solutions for Li-Ion Batteries of Electric Heavy-Duty Vehicles with Fleet Management Strategies. Sustainability 2021, 13, 10639. [Google Scholar]
- Yang, X.G.; Liu, T.; Wang, C.Y. Thermally modulated lithium iron phosphate batteries for mass-market electric vehicles. Nat. Energy 2021, 6, 176–185. [Google Scholar] [CrossRef]
- Lee, M.; Lee, J.; Lee, I.; Lee, J.; Chon, A. Wireless battery management system. In Proceedings of the World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–5. [Google Scholar]
- Rauniyar, A.; Irfan, M.; Saputra, O.D.; Kim, J.W.; Lee, A.R.; Jang, J.M.; Shin, S.Y. Design and development of a Real-Time monitoring system for multiple lead–acid batteries based on Internet of things. Future Internet 2017, 9, 28. [Google Scholar] [CrossRef] [Green Version]
- Bacquet, S.; Maman, M. Radio Frequency Communications for Smart Cells in Battery Pack for Electric Vehicle. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014. [Google Scholar]
- Yang, L.; Li, N.; Hu, L.; Wang, S.; Wang, L.; Zhou, J.; Song, W.L.; Sun, L.; Pan, T.S.; Chen, H.S.; et al. Internal field study of 21700 battery based on long-life embedded wireless temperature sensor. Acta Mech. Sin. Xuebao 2021, 37, 895–901. [Google Scholar] [CrossRef]
- Samanta, A.; Williamson, S.S. A Survey of Wireless Battery Management System: Topology, Emerging Trends, and Challenges. Electronics 2021, 10, 2193. [Google Scholar] [CrossRef]
- Huang, X.; Acharya, A.B.; Meng, J.; Sui, X.; Stroe, D.-I.; Teodorescu, R. Wireless Smart Battery Management System for Electric Vehicles. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 5620–5625. [Google Scholar]
- Kim, H.; Shin, K.G. Efficient sensing matters a lot for large-scale batteries. In Proceedings of the IEEE/ACM Second International Conference on Cyber-Physical Systems, Chicago, IL, USA, 12–14 April 2011; pp. 197–205. [Google Scholar]
- Takeuchi, T.; Terada, T. Evaluation of Wireless Communication Performance in a Li-ion Battery System. J. Auto Contr. Eng. 2014, 2, 26–30. [Google Scholar] [CrossRef]
- Otto, A.; Rzepka, S.; Mager, T.; Michel, B.; Lanciotti, C.; Günther, T.; Kanoun, O. Battery management network for fully electrical vehicles featuring smart systems at cell and pack level. In Advanced Microsystems for Automotive Applications; Springer: New York, NY, USA, 2012; pp. 3–14. [Google Scholar]
- Ibrahim, M.A.; Hassan, G.; Hassanein, H.S.; Obaia, K. A wireless sensor platform for industrial non-hermetic metallic enclosures. In Proceedings of the 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 165–170. [Google Scholar]
- Kumar, P.S.; Xie, L.; Soong, B.-H.; Lee, M.Y. Feasibility for utilizing IEEE 802.15. 4 compliant radios inside rotating electrical machines for wireless condition monitoring applications. IEEE Sens. J. 2018, 18, 4293–4302. [Google Scholar] [CrossRef]
- Vlad, M.; Erik, K.; Higgins, M.D. Position Discrimination of a 2.4 GHz IEEE 802.15. 4 RF Mobile Source Inside-Outside a Vehicle. In Proceedings of the IEEE International Conference on Smart Applications, Communications and Networking (SmartNets), Glasgow, UK, 22–24 September 2021; pp. 1–6. [Google Scholar]
- Mankins, J.C. Technology readiness levels. White Pap. April 1995, 6, 1995. [Google Scholar]
- Straub, J. In search of technology readiness level (TRL) 10. Aerosp. Sci. Technol. 2015, 46, 312–320. [Google Scholar] [CrossRef]
- Texas Instruments CC1200: Low Power and High Performance Wireless Transceiver. Available online: https://www.ti.com/product/CC1200 (accessed on 2 June 2021).
- Texas Instruments CC2520: Second Generation 2.4 GHz ZigBee/IEEE 802.15.4 Wireless Transceiver. Available online: https://www.ti.com/product/CC2520 (accessed on 10 October 2021).
- Texas Instruments SmartRF Studio 7 Documentation. Available online: http://software-dl.ti.com/lprf/smartrftm_studio/docs/help/html/srfstudio.html (accessed on 10 October 2021).
- Wang, L.; Yin, S.; Yu, Z.; Wang, Y.; Yu, T.X.; Zhao, J.; Xie, Z.; Li, Y.; Xu, J. Unlocking the significant role of shell material for lithium-ion battery safety. Mater. Des. 2018, 160, 601–610. [Google Scholar] [CrossRef]
- Ramonet, A.G.; Noguchi, T. IEEE 802.15. 4 Now and Then: Evolution of the LR-WPAN Standard. ICACT Trans. Adv. Commun. Technol. 2020, 8, 1198–1210. [Google Scholar]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Lu, N.H. Linearized, unified two-ray formulation for propagation over a plane earth. In Proceedings of the Sensors for Industry Conference, Houston, TX, USA, 8–10 February 2005; pp. 95–100. [Google Scholar]
- Zöchmann, E.; Guan, K.; Rupp, M. Two-ray models in mmWave communications. In Proceedings of the IEEE 18th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Sapporo, Japan, 3–6 July 2017; pp. 1–5. [Google Scholar]
- Saleh, F. A three ray propagation model for line of sight PCS and micro-cellular services. In Proceedings of the 6th International Symposium on Personal, Indoor and Mobile Radio Communications, Toronto, ON, Canada, 27–29 September 1995; Volume 2, pp. 388–391. [Google Scholar]
- Vlad, M.; Kampert, E.; Higgins, M.D. Ray Tracing 3D Source Modelling for Optical Reflectance Sensing with Wireless Ranging Application. In Proceedings of the IEEE International Symposium on Robotic and Sensors Environments (ROSE), Virtual, 28–29 October 2021; pp. 1–8. [Google Scholar]
- ITU. Effects of building materials and structures on radiowave propagation above about 100 MHz. In Recommendation ITU-R P.2040-2; ITU: Geneva, Switzerland, 2021; pp. 1–30. [Google Scholar]
- Velagapudi, P.; Eravatri, B.C.; Mantri, M.B.; Mani, V.V. Performance analysis of various IEEE 802.15. 4 PHYs under Rayleigh fading channel. In Proceedings of the International Conference on Advanced Computing and Communication Systems, Coimbatore, India, 19–21 December 2013; pp. 1–5. [Google Scholar]
- Zhou, C.; Plass, T.; Jacksha, R.; Waynert, J.A. RF Propagation in Mines and Tunnels: Extensive measurements for vertically, horizontally, and cross-polarized signals in mines and tunnels. IEEE Antennas Propag. Mag. 2015, 57, 88–102. [Google Scholar] [CrossRef]
- Rudd, K.; Craid, R.; Ganley, M.; Hartless, R. Building Materials and Propagation Final Report-Ofcom; Office of Communications: London, UK, 2014. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marsic, V.; Amietszajew, T.; Igic, P.; Faramehr, S.; Fleming, J. Wireless Communication Test on 868 MHz and 2.4 GHz from inside the 18650 Li-Ion Enclosed Metal Shell. Sensors 2022, 22, 1966. https://doi.org/10.3390/s22051966
Marsic V, Amietszajew T, Igic P, Faramehr S, Fleming J. Wireless Communication Test on 868 MHz and 2.4 GHz from inside the 18650 Li-Ion Enclosed Metal Shell. Sensors. 2022; 22(5):1966. https://doi.org/10.3390/s22051966
Chicago/Turabian StyleMarsic, Vlad, Tazdin Amietszajew, Petar Igic, Soroush Faramehr, and Joe Fleming. 2022. "Wireless Communication Test on 868 MHz and 2.4 GHz from inside the 18650 Li-Ion Enclosed Metal Shell" Sensors 22, no. 5: 1966. https://doi.org/10.3390/s22051966
APA StyleMarsic, V., Amietszajew, T., Igic, P., Faramehr, S., & Fleming, J. (2022). Wireless Communication Test on 868 MHz and 2.4 GHz from inside the 18650 Li-Ion Enclosed Metal Shell. Sensors, 22(5), 1966. https://doi.org/10.3390/s22051966