
DC Power Line Communication (PLC) on 868 MHz and 2.4 GHz Wired RF Transceivers



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
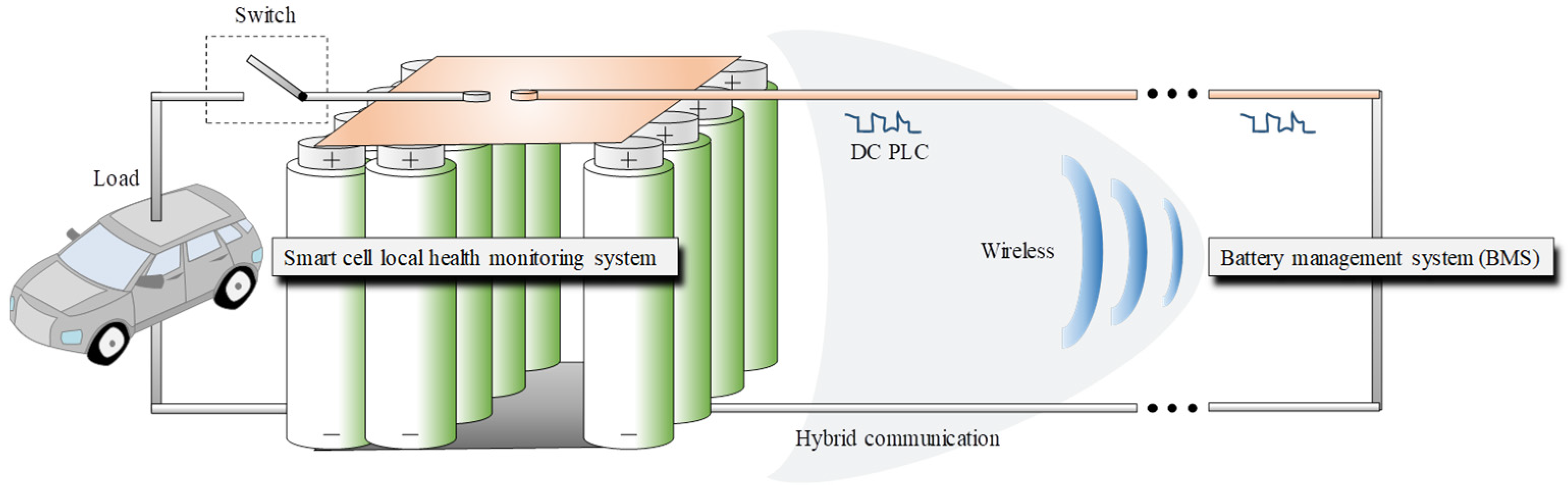
1.1. Health Monitoring Technology in Energy Storage
1.2. Proposed Solution
1.3. Contribution and Paper Organization
2. Methodology and Experimental Setup
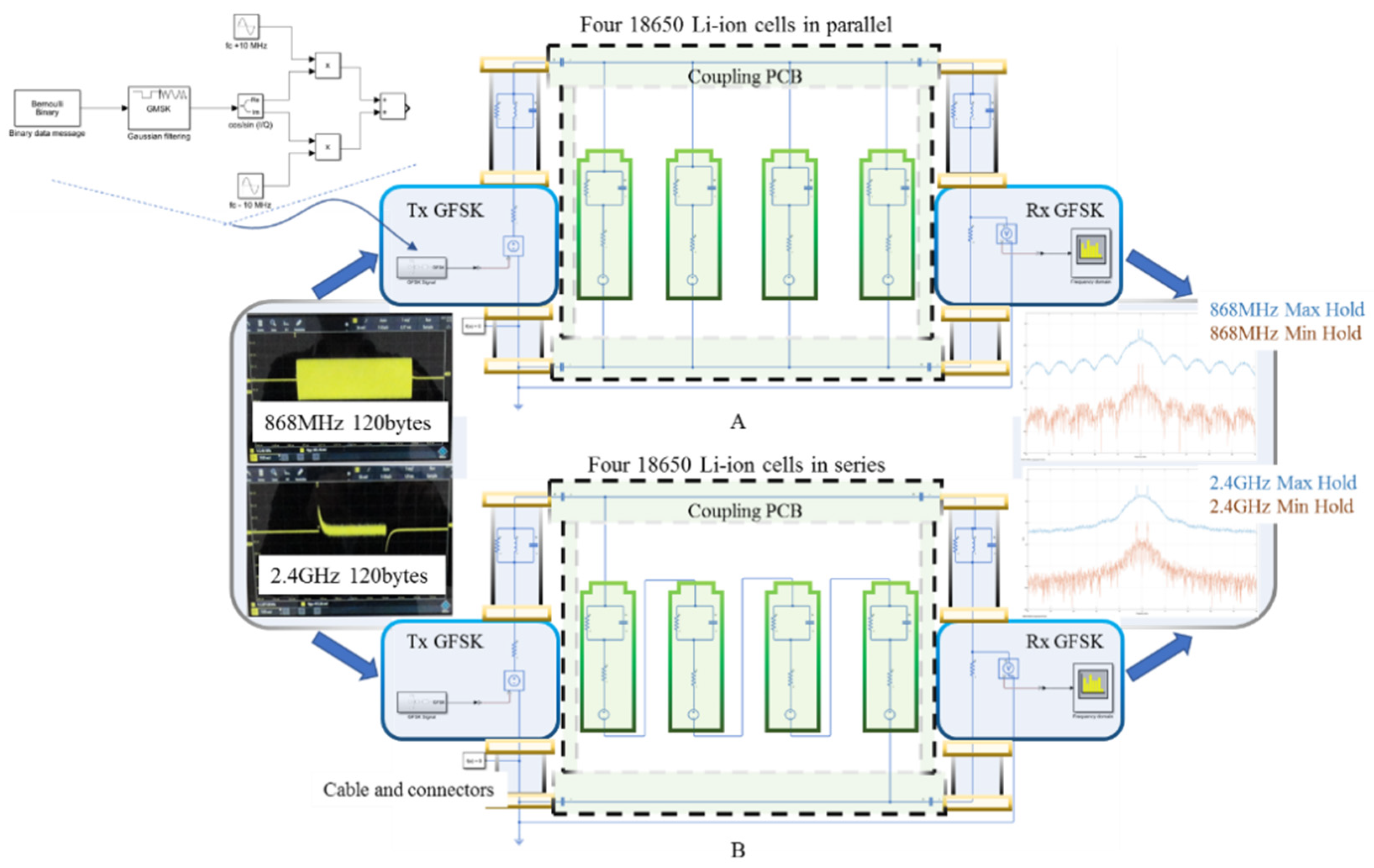
2.1. MATLAB Simulation Setup
2.2. Empirical Experimental Setup
3. Results and Discussion
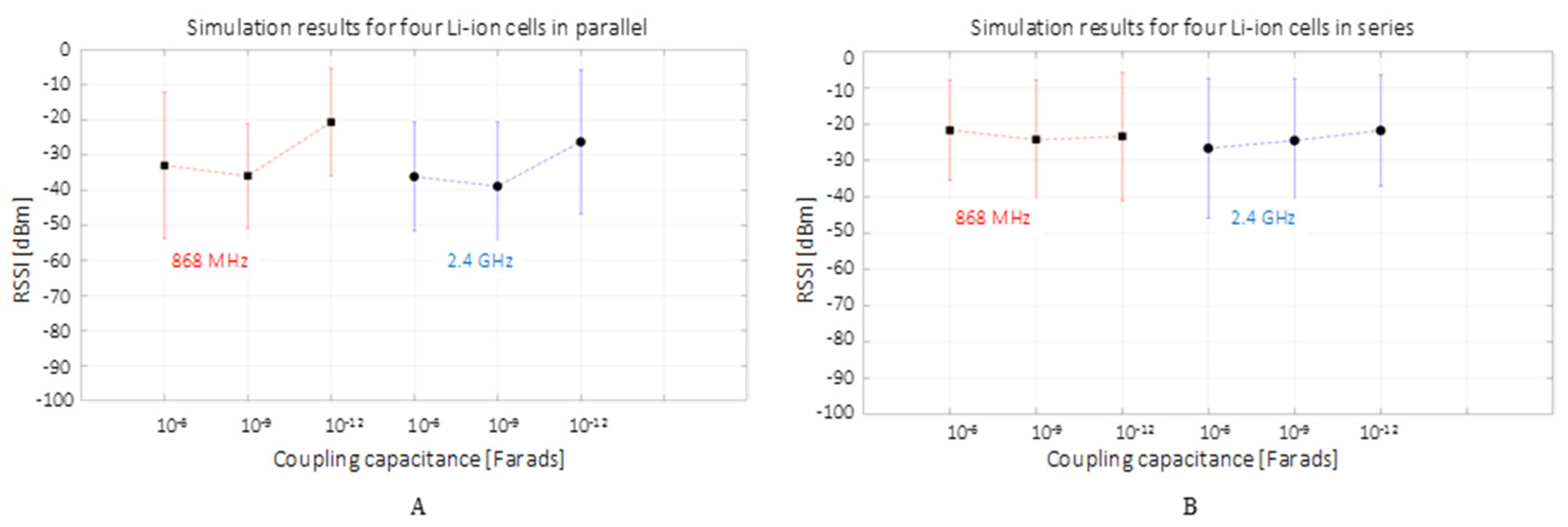
3.1. MATLAB Simulation Results
3.2. Empirical Experimental Results
4. Conclusions and Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiong, R.; Shen, W. Advanced Battery Management Technologies for Electric Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Huang, X.; Sui, X.; Stroe, D.-I.; Teodorescu, R. A review of management architectures and balancing strategies in smart batteries. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 5909–5914. [Google Scholar]
- Fleming, J.; Amietszajew, T.; McTurk, E.; Towers, D.P.; Greenwood, D.; Bhagat, R. Development and evaluation of in-situ instrumentation for cylindrical Li-ion cells using fibre optic sensors. HardwareX 2018, 3, 100–109. [Google Scholar] [CrossRef]
- Rente, B.; Fabian, M.; Vidakovic, M.; Liu, X.; Li, X.; Li, K.; Sun, T.; Grattan, K.T. V Lithium-Ion battery state-of-charge estimator based on FBG-based strain sensor and employing machine learning. IEEE Sens. J. 2020, 21, 1453–1460. [Google Scholar] [CrossRef]
- Amietszajew, T.; Fleming, J.; Roberts, A.J.; Widanage, W.D.; Greenwood, D.; Kok, M.D.R.; Pham, M.; Brett, D.J.L.; Shearing, P.R.; Bhagat, R. Hybrid thermo-electrochemical In Situ instrumentation for lithium-ion energy storage. Batter. Supercaps 2019, 2, 934–940. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Wang, Y.; Yung, W.K.C.; Pecht, M. Ultrasonic health monitoring of lithium-ion batteries. Electronics 2019, 8, 751. [Google Scholar] [CrossRef] [Green Version]
- Surya, S.; Rao, V.; Williamson, S.S. Comprehensive Review on Smart Techniques for Estimation of State of Health for Battery Management System Application. Energies 2021, 14, 4617. [Google Scholar] [CrossRef]
- Fleming, J.; Amietszajew, T.; Charmet, J.; Roberts, A.J.; Greenwood, D.; Bhagat, R. The design and impact of in-situ and operando thermal sensing for smart energy storage. J. Energy Storage 2019, 22, 36–43. [Google Scholar] [CrossRef]
- Jichao, H.; Wang, Z.; Ma, F.; Yang, J.; Xu, X.; Qu, C.; Zhang, J.; Shan, T.; Hou, Y.; Zhou, Y. Thermal Runaway Prognosis of Battery Systems Using the Modified Multi-Scale Entropy in Real-World Electric Vehicles. IEEE Trans. Transp. Electrif. 2021, 7, 2269–2278. [Google Scholar]
- Sebastian, S.; Lukasiewycz, M.; Narayanaswamy, S.; Kauer, M.; Chakraborty, S. Smart cells for embedded battery management. In Proceedings of the IEEE International Conference on Cyber-Physical Systems, Networks, and Applications, Hong Kong, China, 25–26 August 2014; pp. 59–64. [Google Scholar]
- Zuchang, G.; Chin, C.S.; Chiew, J.H.K.; Jia, J.; Zhang, C. Design and implementation of a smart lithium-ion battery system with real-time fault diagnosis capability for electric vehicles. Energies 2017, 10, 1503. [Google Scholar]
- Thomas, F.L.; Guenter, S.; Guenter, H.; Rose, M.; Jossen, A. Power Line Communications for Automotive High Voltage Battery Systems: Channel Modeling and Coexistence Study with Battery Monitoring. Energies 2021, 14, 1851. [Google Scholar]
- Timothy, A.V.; Begum, G.; EH, S.J.; James, M. Development of an in-vehicle power line communication network with in-situ instrumented smart cells. Transp. Eng. 2021, 6, 100098. [Google Scholar]
- Koshkouei, M.J.; Kampert, E.; Moore, A.D.; Higgins, M.D. Evaluation of an in situ QAM-based Power Line Communication system for lithium-ion batteries. IET Electr. Syst. Transp. 2021. [Google Scholar] [CrossRef]
- Gozdur, R.; Przerywacz, T.; Bogdański, D. Low Power Modular Battery Management System with a Wireless Communication Interface. Energies 2021, 14, 6320. [Google Scholar] [CrossRef]
- Mattia, R.; Meng, J.; Gherman, T.; Grandi, G.; Teodorescu, R. Smart battery pack for electric vehicles based on active balancing with wireless communication feedback. Energies 2019, 12, 3862. [Google Scholar]
- Alapati, S.V.; Nadella, I.; Bobba, P.B.; Upadhayay, M.D. Development of wireless charging system along with power line communication used in Electric Vehicles. E3S Web Conf. 2019, 87, 1021. [Google Scholar] [CrossRef] [Green Version]
- Amietszajew, T.; McTurk, E.; Fleming, J.; Bhagat, R. Understanding the limits of rapid charging using instrumented commercial 18650 high-energy Li-ion cells. Electrochim. Acta 2018, 263, 346–352. [Google Scholar] [CrossRef]
- Mohammed, A.-S.; Bartosz, P.; Maciej, Z.; Karwat, A.; Pol, M.; Chełchowski, Ł.; Van Mierlo, J.; Berecibar, M. Slow and Fast Charging Solutions for Li-Ion Batteries of Electric Heavy-Duty Vehicles with Fleet Management Strategies. Sustainability 2021, 13, 10639. [Google Scholar]
- Yang, X.G.; Liu, T.; Wang, C.Y. Thermally modulated lithium iron phosphate batteries for mass-market electric vehicles. Nat. Energy 2021, 6, 176–185. [Google Scholar] [CrossRef]
- Kamrul, H.M.; MD, M.; Habib, A.K.M.A.; Motakabber, S.M.A.; Islam, S. Review of electric vehicle energy storage and management system: Standards, issues, and challenges. J. Energy Storage 2021, 41, 102940. [Google Scholar]
- Mahammad, A.H.; Murshadul, H.M.; Hussain, A.; Yusof, Y.; Ker, P.J. State-of-the-art and energy management system of lithium-ion batteries in electric vehicle applications: Issues and recommendations. IEEE Access 2018, 6, 19362–19378. [Google Scholar]
- Charlon, O.; Locher, M.; Visser, H.A.; Duperray, D.; Chen, J.; Judson, M.; Landesman, A.L.; Hritz, C.; Kohlschuetter, U.; Zhang, Y. A low-power high-performance SiGe BiCMOS 802.11 a/b/g transceiver IC for cellular and Bluetooth co-existence applications. IEEE J. Solid-State Circuits 2006, 41, 1503–1512. [Google Scholar] [CrossRef]
- Seo, H.-M.; Moon, Y.; Park, Y.-K.; Kim, D.; Kim, D.-S.; Lee, Y.-S.; Won, K.-H.; Kim, S.-D.; Choi, P. A low power fully CMOS integrated RF transceiver IC for wireless sensor networks. IEEE Trans. Very Large Scale Integr. Syst. 2007, 15, 227–231. [Google Scholar] [CrossRef]
- YAMAR Electronics Ltd. SIG60-UART over Power Line for AC/DC Multiplex Network (DS-SIG60 R107). Available online: https://www.yamar.com/datasheet/DS-SIG60.pdf (accessed on 24 January 2022).
- Monnier, O. TI Delivers Flexible Power Line Communications Solutions. Available online: https://www.digikey.co.za/htmldatasheets/production/841010/0/0/1/PCL-Solutions.pdf (accessed on 6 June 2021).
- Kosonen, A.; Jokinen, M.; Ahola, J.; Niemela, M.; Toukonen, J. Ethernet-based broadband power line communication between motor and inverter. IET Electr. Power Appl. 2008, 2, 316–324. [Google Scholar] [CrossRef]
- Brandl, M.; Kellner, K. Performance evaluation of power-line communication systems for lin-bus based data transmission. Electronics 2021, 10, 85. [Google Scholar] [CrossRef]
- Lodi, G.A.; Ott, A.; Cheema, S.A.; Haardt, M.; Freitag, T. Power Line Communication in automotive harness on the example of Local Interconnect Network. In Proceedings of the 2016 International Symposium on Power Line Communications and its Applications (ISPLC), Bottrop, Germany, 20–23 March 2016; pp. 212–217. [Google Scholar]
- Jousse, J.; Ginot, N.; Batard, C.; Lemaire, E. Power line communication management of battery energy storage in a small-scale autonomous photovoltaic system. IEEE Trans. Smart Grid 2016, 8, 2129–2137. [Google Scholar] [CrossRef]
- Thale, S.; Agarwal, V. Controller Area Network (CAN) based smart protection scheme for Solar PV, fuel cell, Ultra-Capacitor and wind energy system based microgrid. In Proceedings of the 2012 38th IEEE Photovoltaic Specialists Conference, Austin, TX, USA, 3–8 June 2012; pp. 580–585. [Google Scholar]
- Nguyen, T.V.; Petit, P.; Maufay, F.; Aillerie, M.; Charles, J.-P. Powerline communication (PLC) on HVDC bus in a renewable energy system. Energy Procedia 2013, 36, 657–666. [Google Scholar] [CrossRef]
- Sanchez-Pacheco, F.J.; Sotorrío-Ruiz, P.J.; Heredia-Larrubia, J.R.; Pérez-Hidalgo, F.; de Cardona, M.S. PLC-based PV plants smart monitoring system: Field measurements and uncertainty estimation. IEEE Trans. Instrum. Meas. 2014, 63, 2215–2222. [Google Scholar] [CrossRef]
- Artale, G.; Cataliotti, A.; Cosentino, V.; Guaiana, S.; Di Cara, D.; Panzavecchia, N.; Tinè, G.; Fiorelli, R. Narrowband power line communications for medium voltage Smart Grids. In Proceedings of the 2014 IEEE International Conference on Smart Grid Communications (SmartGridComm), Venice, Italy, 3–6 November 2014; pp. 469–474. [Google Scholar]
- Cohn, G.; Stuntebeck, E.; Pandey, J.; Otis, B.; Abowd, G.D.; Patel, S.N. SNUPI: Sensor nodes utilizing powerline infrastructure. In Proceedings of the 12th ACM International Conference on Ubiquitous Computing, Copenhagen, Denmark, 26–29 September 2010; pp. 159–168. [Google Scholar]
- Igboamalu, F.N.; Ndjiongue, A.R.; deBeer, A.S.; Ferreira, H.C. Contact-less PLC: Channel analysis and measurements campaign. Telecommun. Syst. 2021, 77, 389–398. [Google Scholar] [CrossRef]
- Pan, Q.W.; Kumar, R. 2.4 GHz propagation characteristics of power line cable. In Proceedings of the 2011 IEEE Symposium on Wireless Technology and Applications (ISWTA), Langkawi, Malaysia, 25–28 September 2011; pp. 133–136. [Google Scholar]
- Antoniali, M.; Tonello, A.M. Measurement and characterization of load impedances in home power line grids. IEEE Trans. Instrum. Meas. 2013, 63, 548–556. [Google Scholar] [CrossRef]
- Pavlidou, N.; Vinck, A.J.H.; Yazdani, J.; Honary, B. Power line communications: State of the art and future trends. IEEE Commun. Mag. 2003, 41, 34–40. [Google Scholar] [CrossRef] [Green Version]
- Yigit, M.; Gungor, V.C.; Tuna, G.; Rangoussi, M.; Fadel, E. Power line communication technologies for smart grid applications: A review of advances and challenges. Comput. Netw. 2014, 70, 366–383. [Google Scholar] [CrossRef]
- Hashmat, R.; Pagani, P.; Zeddam, A.; Chonavel, T. MIMO communications for inhome PLC networks: Measurements and results up to 100 MHz. In Proceedings of the ISPLC2010, Rio de Janeiro, Brazil, 28–31 March 2010; pp. 120–124. [Google Scholar]
- Versolatto, F.; Tonello, A.M. PLC channel characterization up to 300 MHz: Frequency response and line impedance. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 3525–3530. [Google Scholar]
- EN 300 339 V1.1.1 (1998-03); Electromagnetic Compatibility and Radio Spectrum Matters (ERM);General ElectroMagnetic Compatibility (EMC)for Radio Communications Equipment. ETSI: Sophia Antipolis, France, 1998.
- Texas Instruments CC1200 Low-Power, High-Performance RF Transceiver. Available online: https://www.ti.com/lit/ds/symlink/cc1200.pdf?ts=1642355028391&ref_url=https%253A%252F%252Fwww.google.com%252F (accessed on 10 October 2021).
- Texas Instruments CC2520 Datasheet. 2.4 GHz IEEE 802.15.4/ZIGBEE® RF Transceiver. Available online: https://www.ti.com/lit/ds/symlink/cc2520.pdf?ts=1642368628149&ref_url=https%253A%252F%252Fwww.google.com%252F (accessed on 10 October 2021).
- Texas Instruments SMARTRF06EBK: SmartRF06 Evaluation Board. Available online: https://www.ti.com/tool/SMARTRF06EBK (accessed on 10 October 2021).
- Texas Instruments CC1200: Low Power and High Performance Wireless Transceiver. Available online: https://www.ti.com/product/CC1200 (accessed on 10 October 2021).
- Texas Instruments CC2520: Second Generation 2.4 GHz ZigBee/IEEE 802.15.4 Wireless Transceiver. Available online: https://www.ti.com/product/CC2520 (accessed on 10 October 2021).
- Borowski, J.; Feher, K. Nonobvious correlation properties of quadrature GMSK, a modulation technique adopted worldwide. IEEE Trans. Broadcast. 1995, 41, 69–75. [Google Scholar] [CrossRef]
- Chang, D.-C. Least squares/maximum likelihood methods for the decision-aided GFSK receiver. IEEE Signal Process. Lett. 2009, 16, 517–520. [Google Scholar] [CrossRef]
- Mohamed, K.S. Hardware Realization of GFSK-Based Bluetooth Modem. In Bluetooth 5.0 Modem Design for IoT Devices; Springer: Berlin/Heidelberg, Germany, 2022; pp. 45–73. [Google Scholar]
- Švedek, T.; Herceg, M.; Matić, T. A simple signal shaper for GMSK/GFSK and MSK modulator based on sigma-delta look-up table. Radioengineering 2009, 18, 230–237. [Google Scholar]
- Tabassam, A.A.; Ali, F.A.; Kalsait, S.; Suleman, M.U. Building software-defined radios in MATLAB simulink-A step towards cognitive radios. In Proceedings of the 2011 UkSim 13th International Conference on Computer Modelling and Simulation, Cambridge, UK, 30 March–1 April 2011; pp. 492–497. [Google Scholar]
- Mhlanga, K.; Mafumo, M.; Sotenga, P.; Phate, T.; Olwal, T. Design and simulation of a bluetooth communication system. In Proceedings of the 2015 International Conference on Emerging Trends in Networks and Computer Communications (ETNCC), Windhoek, Namibia, 17–20 May 2015; pp. 7–12. [Google Scholar]
- Sadinov, S.M.; Angelov, K.K. Design of Transmission Channel Simulator for Communication with Artificial Pico-and Nanosatellites. In Proceedings of the 2021 XXX International Scientific Conference Electronics (ET), Sozopol, Bulgaria, 15–17 September 2021; pp. 1–4. [Google Scholar]
- Santana Gómez, D. Digital GFSK modem study, design and implementation applied to mobile communications. Available online: https://repositorio.tec.mx/bitstream/handle/11285/567139/DocsTec_3381.pdf?sequence=1&isAllowed=y (accessed on 2 June 2021).
- Rohde & Schwarz R&S®RTM3000 Oscilloscope. Available online: https://www.rohde-schwarz.com/uk/products/test-and-measurement/oscilloscopes/rs-rtm3000-oscilloscope_63493-427459.html (accessed on 10 October 2021).
- Texas Instruments SmartRF Studio 7 Documentation. Available online: http://software-dl.ti.com/lprf/smartrftm_studio/docs/help/html/srfstudio.html (accessed on 10 October 2021).
- Meng, J.; Luo, G.; Ricco, M.; Swierczynski, M.; Stroe, D.-I.; Teodorescu, R. Overview of lithium-ion battery modeling methods for state-of-charge estimation in electrical vehicles. Appl. Sci. 2018, 8, 659. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Cao, Z. A review of impedance matching techniques in power line communications. Electronics 2019, 8, 1022. [Google Scholar] [CrossRef] [Green Version]
- McLaughlin, J.C.; Kaiser, K.L. “Deglorifying” the maximum power transfer theorem and factors in impedance selection. IEEE Trans. Educ. 2007, 50, 251–255. [Google Scholar] [CrossRef]
- Belostotski, L. No noise is good noise: Noise matching, noise canceling, and maybe a bit of both for wide-band LNAs. IEEE Microw. Mag. 2016, 17, 28–40. [Google Scholar] [CrossRef]
- Lopez, G.; Matanza, J.; De La Vega, D.; Castro, M.; Arrinda, A.; Moreno, J.I.; Sendin, A. The role of power line communications in the smart grid revisited: Applications, challenges, and research initiatives. IEEE Access 2019, 7, 117346–117368. [Google Scholar] [CrossRef]
- Sharma, K.; Saini, L.M. Power-line communications for smart grid: Progress, challenges, opportunities and status. Renew. Sustain. Energy Rev. 2017, 67, 704–751. [Google Scholar] [CrossRef]
- Meng, H.; Guan, Y.L.; Chen, S. Modeling and analysis of noise effects on broadband power-line communications. IEEE Trans. Power Deliv. 2005, 20, 630–637. [Google Scholar] [CrossRef]
- Lopes, P.A.C.; Pinto, J.M.M.; Gerald, J.B. Dealing with unknown impedance and impulsive noise in the power-line communications channel. IEEE Trans. Power Deliv. 2012, 28, 58–66. [Google Scholar] [CrossRef]
- Bolsinger, C.; Brix, J.; Dragan, M.; Birke, K.P. Investigating and modeling the transmission channel of a prismatic lithium-ion cell and module for powerline communication. J. Energy Storage 2017, 10, 11–19. [Google Scholar] [CrossRef]
- Landinger, T.F.; Schwarzberger, G.; Rose, M.; Dollhaeubl, S.; Hofer, G.; Talei, A.P.; Jossen, A. Power Line Communications in Automotive Traction Batteries: A Proof of Concept. In Proceedings of the 2020 IEEE International Symposium on Power Line Communications and its Applications (ISPLC), Malaga, Spain, 11–13 May 2020; pp. 1–5. [Google Scholar]
- Talie, A.P.; Pribyl, W.A.; Hofer, G. Electric vehicle battery management system using power line communication technique. In Proceedings of the 2018 14th Conference on Ph.D. Research in Microelectronics and Electronics (PRIME), Prague, Czech Republic, 2–5 July 2018; pp. 225–228. [Google Scholar]
- Ko, J.; Eriksson, J.; Tsiftes, N.; Dawson-Haggerty, S.; Vasseur, J.-P.; Durvy, M.; Terzis, A.; Dunkels, A.; Culler, D. Industry: Beyond interoperability: Pushing the performance of sensor network ip stacks. In Proceedings of the 9th ACM Conference on Embedded Networked Sensor Systems, Seattle, WA, USA, 1–4 November 2011; pp. 1–11. [Google Scholar]
- Judkoff, R.; Polly, J.; Bianchi, M.; Neymark, J.; Kennedy, M. Building Energy Simulation Test for Existing Homes (BESTEST-EX): Instructions for Implementing the Test Procedure, Calibration Test Reference Results, and Example Acceptance-Range Criteria; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2011. [Google Scholar]
- Schubert, J.; Hörling, P. Preference-based Monte Carlo weight assignment for multiple-criteria decision making in defense planning. In Proceedings of the 17th International Conference on Information Fusion (FUSION); Salamanca, Spain, 7–10 July 2014, pp. 1–8.


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marsic, V.; Amietszajew, T.; Igic, P.; Faramehr, S.; Fleming, J. DC Power Line Communication (PLC) on 868 MHz and 2.4 GHz Wired RF Transceivers. Sensors 2022, 22, 2043. https://doi.org/10.3390/s22052043
Marsic V, Amietszajew T, Igic P, Faramehr S, Fleming J. DC Power Line Communication (PLC) on 868 MHz and 2.4 GHz Wired RF Transceivers. Sensors. 2022; 22(5):2043. https://doi.org/10.3390/s22052043
Chicago/Turabian StyleMarsic, Vlad, Tazdin Amietszajew, Petar Igic, Soroush Faramehr, and Joe Fleming. 2022. "DC Power Line Communication (PLC) on 868 MHz and 2.4 GHz Wired RF Transceivers" Sensors 22, no. 5: 2043. https://doi.org/10.3390/s22052043