
Comparison of Empirical Mode Decomposition and Singular Spectrum Analysis for Quick and Robust Detection of Aerodynamic Instabilities in Centrifugal Compressors †



Abstract
:1. Introduction
2. Materials and Methods
2.1. Decomposition Methods
2.1.1. Empirical Mode Decomposition
2.1.2. Singular Spectrum Analysis
2.1.3. Parameters of EMD and SSA
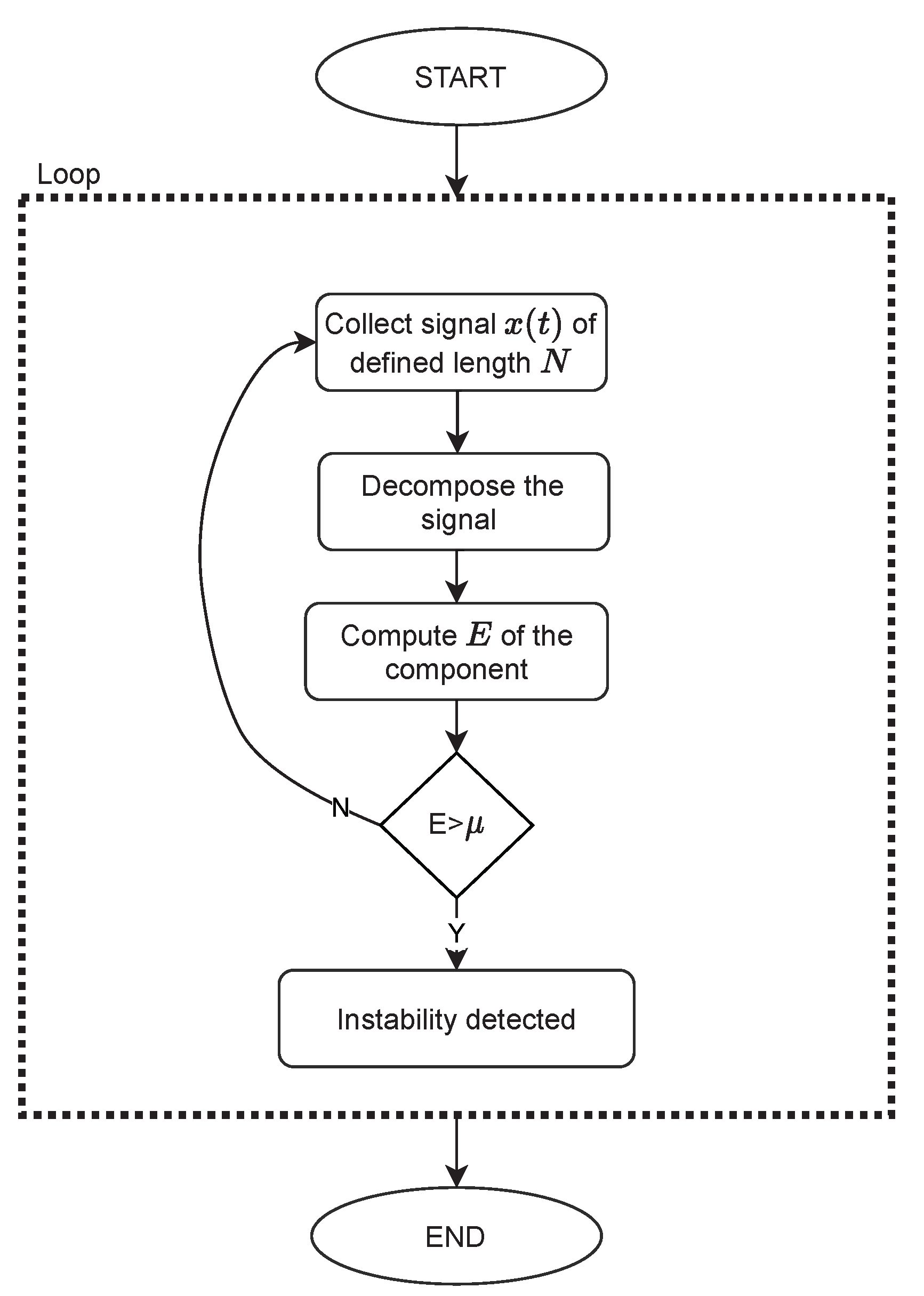
2.2. Strategy for Real-Time Detection of Instabilities
2.3. Processing of the Components for Detection of Instabilities
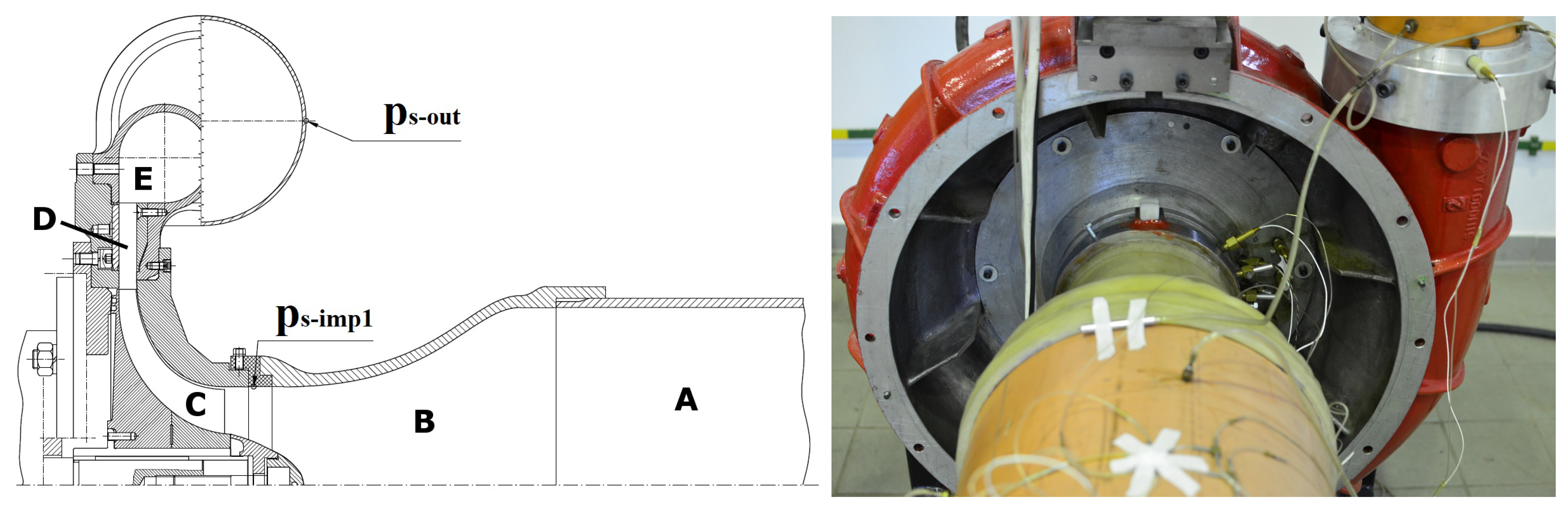
2.4. Test Rig and Pressure Signals
3. Results
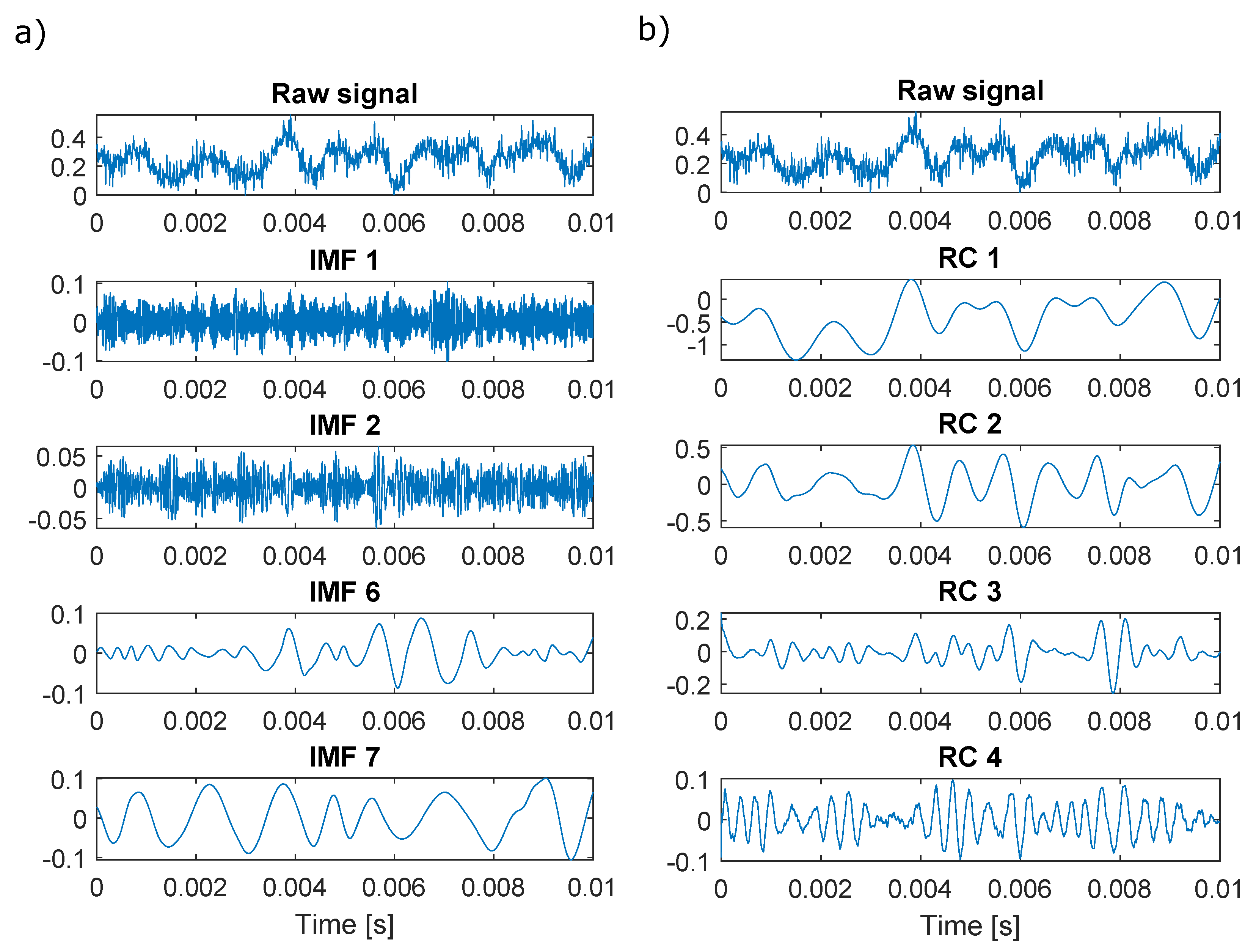
3.1. Overview of the Signals
3.2. Inlet Recirculation
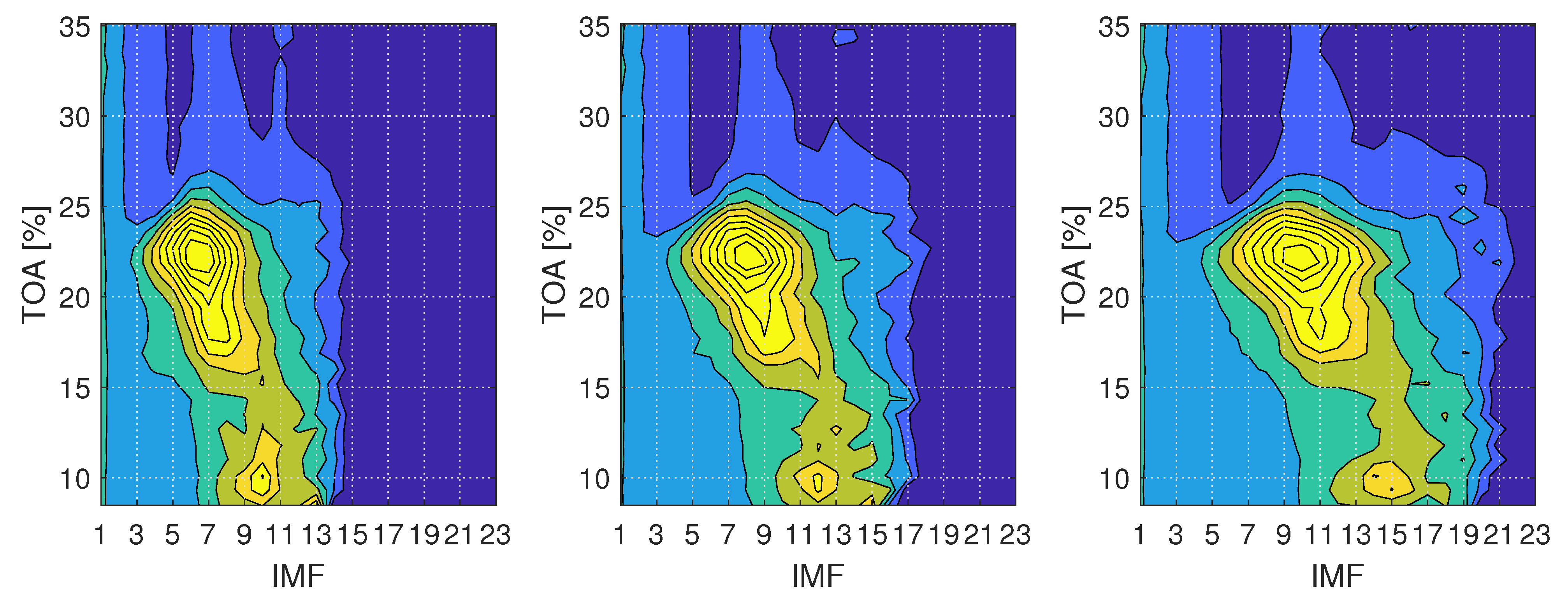
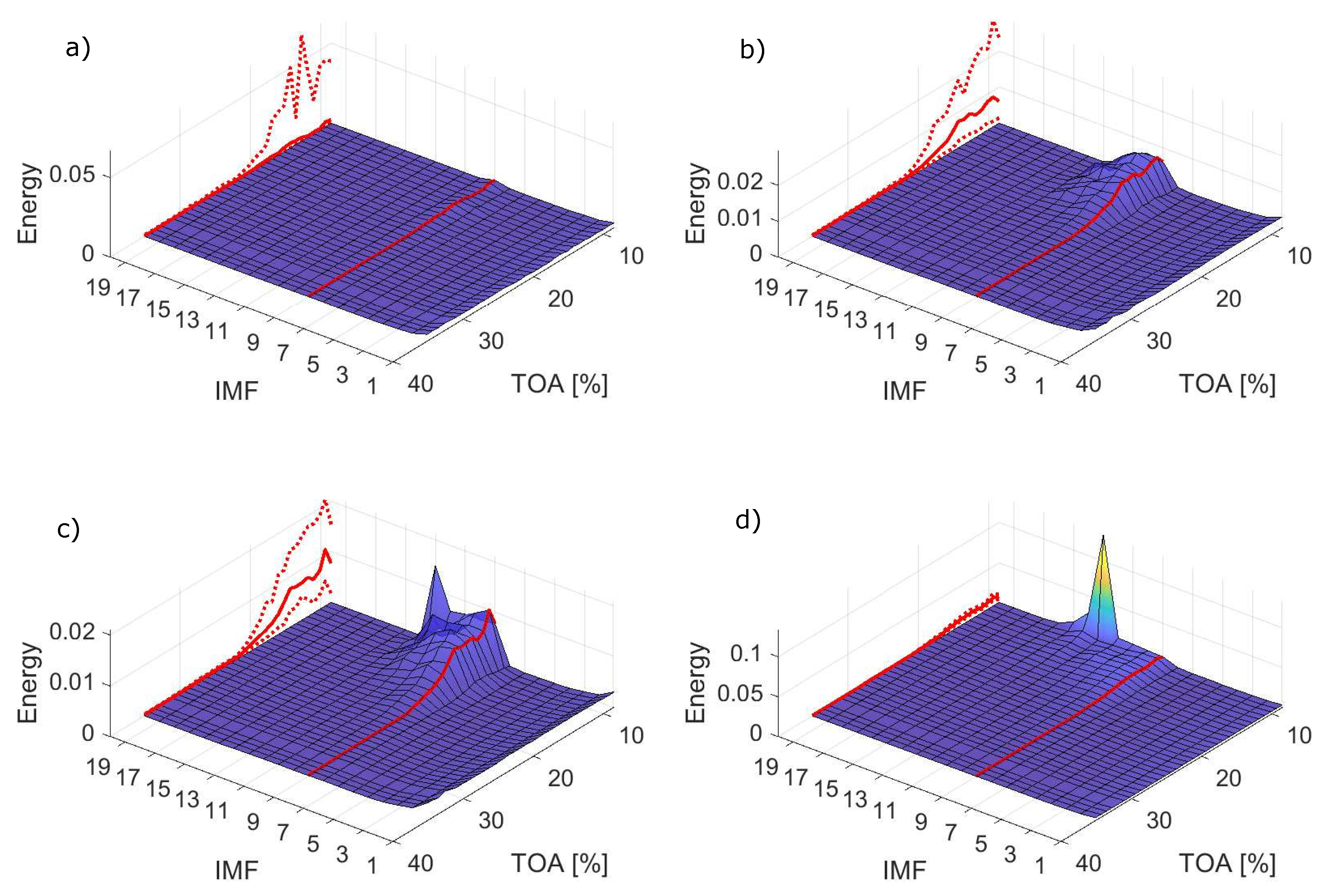
3.2.1. EMD-Based Detection
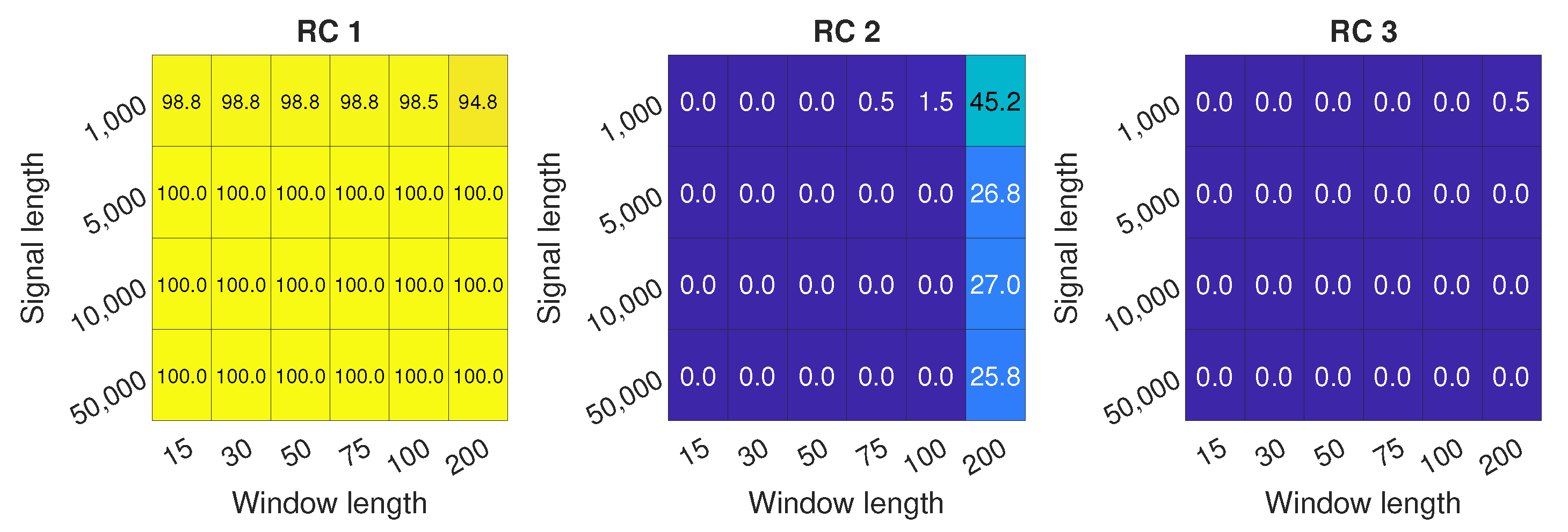
3.2.2. SSA-Based Detection
3.3. Surge
3.3.1. EMD-Based Detection
3.3.2. SSA-Based Detection
3.4. Timing of the Methods
4. Discussion
5. Conclusions
- Both EMD and SSA offer high sensitivity of detection, requiring 0.1 s of data acquisition time for over 99% accuracy in differentiation of the conditions. The data processing time using PC class computer was around 0.05 s. With processing time lower than required acquisition time, both methods have potential to be used in real-time detection systems.;
- When only a single component is of interest, SSA operates quicker than EMD. This pace advantage comes from that SSA allows to independently obtain each of the components, unlike EMD, which is sequential and requires all preceding IMFs to be extracted. With both methods, there should still remain space to increase the number of extracted components, while remaining below the acquisition time limit;
- EMD can be considered a better method for inlet recirculation detection, as its components are more interpretable and confined to physical phenomena than those of SSA, especially if the phenomena are not dominating in the signal. Thus, a selected component can be associated with inlet recirculation with higher confidence. SSA can be regarded better for surge detection as it is faster than EMD and the most important instability is expected to be found in RC 1;
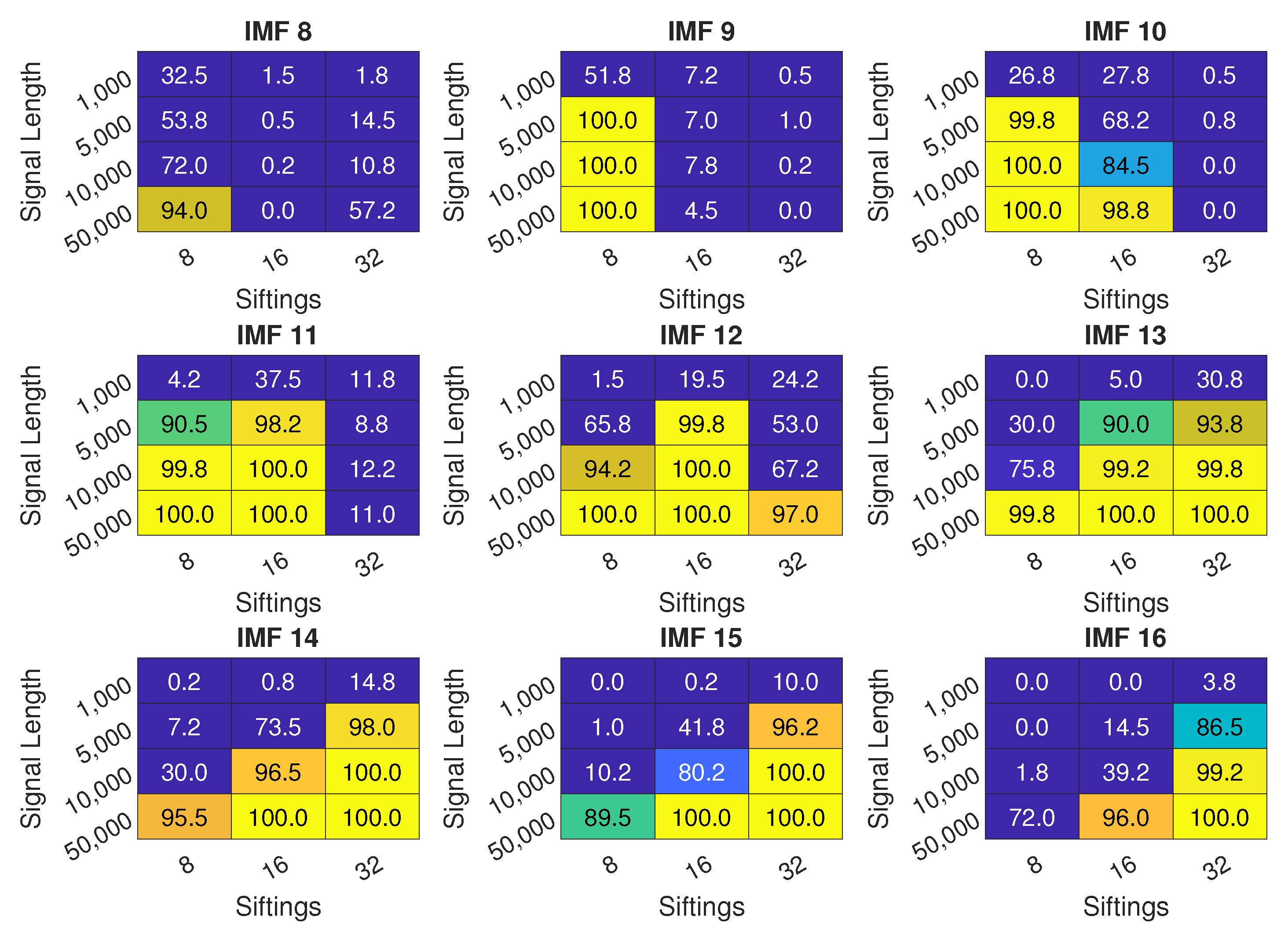
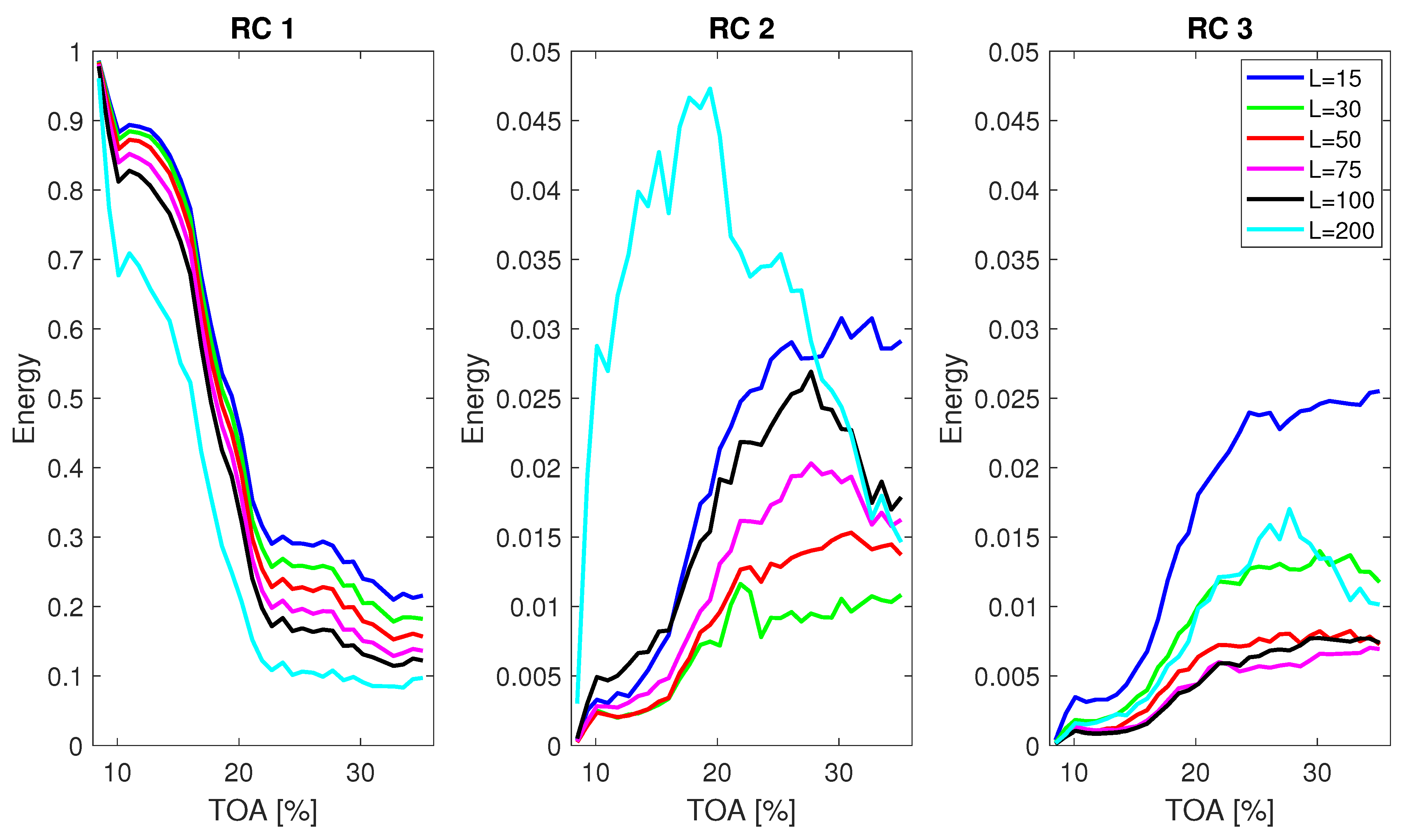
- The number of sifting iterations has little influence on the overall performance of EMD. Keeping the value of iterations low ensures quick decomposition and does not decrease the accuracy of detection compared to a larger number of siftings. Choice of window length for SSA has more important influence on the outcomes of decomposition, especially if the feature of interest is not the only one dominating in the signal. If a dominating feature is to be extracted, the window length has less influence;
- Both methods rely on low frequency to make a detection, disregarding the high-frequency components. Therefore, it should be possible to obtain similar indications with lower sampling frequency. With the same acquisition time, the processing time could be shorter, making both SSA and EMD even more adequate for quick and robust detection of instabilities.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| EMD | Empirical mode decomposition |
| SSA | Singular spectrum analysis |
| RC | Reconstructed component |
| IMF | Intrinsic mode function |
| TOA | Throttle opening area |
| RMS | Root mean square |
| PC | Personal computer |
| FPGA | Field-programmable gate array |
References
- Bloch, H.P. A Practical Guide to Compressor Technology, 2nd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Leufvén, O.; Eriksson, L. A surge and choke capable compressor flow model-Validation and extrapolation capability. Control Eng. Pract. 2013, 21, 1871–1883. [Google Scholar] [CrossRef] [Green Version]
- Day, I.J. Stall, Surge, and 75 Years of Research. J. Turbomach. 2015, 138, 011001. [Google Scholar] [CrossRef]
- Sundström, E. Centrifugal Compressor Flow Instabilities at Low Mass Flow Rate; Technical Report March; KTH: Stockholm, Sweden, 2016. [Google Scholar]
- Sundström, E.; Semlitsch, B.; Mihăescu, M. Generation mechanisms of rotating stall and surge in centrifugal compressors. Flow Turbul. Combust. 2018, 100, 705–719. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schreiber, C. Inlet Recirculation in Radial Compressors. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 2017. [Google Scholar]
- Zhao, X.; Zhou, Q.; Yang, S.; Li, H. Rotating Stall Induced Non-Synchronous Blade Vibration Analysis for an Unshrouded Industrial Centrifugal Compressor. Sensors 2019, 19, 4995. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brown, C.; Sawyer, S.; Oakes, W. Wavelet based analysis of rotating stall and surge in a high speed centrifugal compressor. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Indianapolis, Indiana, 7–10 July 2002; p. 4080. [Google Scholar]
- Liskiewicz, G.; Horodko, L. Time-frequency analysis of the Surge Onset in the Centrifugal Blower. Open Eng. 2015, 5, 299–306. [Google Scholar] [CrossRef]
- Yu, Y.; Junsheng, C. A roller bearing fault diagnosis method based on EMD energy entropy and ANN. J. Sound Vib. 2006, 294, 269–277. [Google Scholar] [CrossRef]
- Peng, Z.; Peter, W.T.; Chu, F. A comparison study of improved Hilbert–Huang transform and wavelet transform: Application to fault diagnosis for rolling bearing. Mech. Syst. Signal Process. 2005, 19, 974–988. [Google Scholar] [CrossRef]
- Xue, X.; Wang, T. Stall recognition for centrifugal compressors during speed transients. Appl. Therm. Eng. 2019, 153, 104–112. [Google Scholar] [CrossRef]
- Komatsubara, Y.; Mizuki, S. Dynamical system analysis of unsteady phenomena in centrifugal compressor. J. Therm. Sci. 1997, 6, 14–20. [Google Scholar] [CrossRef]
- Moca, V.V.; Bârzan, H.; Nagy-Dăbâcan, A.; Mureșan, R.C. Time-frequency super-resolution with superlets. Nat. Commun. 2021, 12, 337. [Google Scholar] [CrossRef]
- Frei, M.G.; Osorio, I. Intrinsic time-scale decomposition: Time–frequency–energy analysis and real-time filtering of non-stationary signals. Proc. R. Soc. A Math. Phys. Eng. Sci. 2007, 463, 321–342. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Rebeiz, E.; Ghadam, A.S.H.; Valkama, M.; Cabric, D. Spectrum sensing under RF non-linearities: Performance analysis and DSP-enhanced receivers. IEEE Trans. Signal Process. 2015, 63, 1950–1964. [Google Scholar] [CrossRef]
- Abdelgelil, M.E.; Minn, H. Impact of nonlinear RFI and countermeasure for radio astronomy receivers. IEEE Access 2018, 6, 11424–11438. [Google Scholar] [CrossRef]
- Hua, X.; Ono, Y.; Peng, L.; Cheng, Y.; Wang, H. Target detection within nonhomogeneous clutter via total bregman divergence-based matrix information geometry detectors. IEEE Trans. Signal Process. 2021, 69, 4326–4340. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Rai, V.; Mohanty, A. Bearing fault diagnosis using FFT of intrinsic mode functions in Hilbert–Huang transform. Mech. Syst. Signal Process. 2007, 21, 2607–2615. [Google Scholar] [CrossRef]
- Shrivastava, Y.; Singh, B. A comparative study of EMD and EEMD approaches for identifying chatter frequency in CNC turning. Eur. J. Mech.-A/Solids 2019, 73, 381–393. [Google Scholar] [CrossRef]
- Shrivastava, Y.; Singh, B. Online monitoring of tool chatter in turning based on ensemble empirical mode decomposition and Teager Filter. Trans. Inst. Meas. Control 2020, 42, 1166–1179. [Google Scholar] [CrossRef]
- Huang, N.E.; Wu, M.L.; Qu, W.; Long, S.R.; Shen, S.S. Applications of Hilbert–Huang transform to non-stationary financial time series analysis. Appl. Stoch. Models Bus. Ind. 2003, 19, 245–268. [Google Scholar] [CrossRef]
- Muruganatham, B.; Sanjith, M.; Krishnakumar, B.; Murty, S.S. Roller element bearing fault diagnosis using singular spectrum analysis. Mech. Syst. Signal Process. 2013, 35, 150–166. [Google Scholar] [CrossRef]
- Mei, Y.; Mo, R.; Sun, H.; Bu, K. Chatter detection in milling based on singular spectrum analysis. Int. J. Adv. Manuf. Technol. 2018, 95, 3475–3486. [Google Scholar] [CrossRef]
- Hassani, H.; Soofi, A.S.; Zhigljavsky, A.A. Predicting daily exchange rate with singular spectrum analysis. Nonlinear Anal. Real World Appl. 2010, 11, 2023–2034. [Google Scholar] [CrossRef]
- Garcia, D.; Stickland, M.; Liśkiewicz, G. Dynamical system analysis of unstable flow phenomena in centrifugal blower. Open Eng. 2015, 5, 332–342. [Google Scholar] [CrossRef]
- Logan, A.; Cava, D.G.; Liśkiewicz, G. Singular spectrum analysis as a tool for early detection of centrifugal compressor flow instability. Measurement 2021, 173, 108536. [Google Scholar] [CrossRef]
- Tamaki, H. Experimental Study on Surge Inception in a Centrifugal Compressor. Int. J. Fluid Mach. Syst. 2009, 2, 409–417. [Google Scholar] [CrossRef] [Green Version]
- Stajuda, M.; Liskiewicz, G.; Garcia, D. Flow Instabilities Detection in Centrifugal Blower Using Empirical Mode Decomposition. In Proceedings of the Global Power & Propulsion Society, Beijing, China, 16–18 September 2019. [Google Scholar] [CrossRef]
- Stajuda, M.; Cava, D.G.; Liśkiewicz, G. Evaluation of EMD and SSA sensitivity for efficient detection of aerodynamic instabilities in centrifugal compressors. In Proceedings of the 2021 Signal Processing Symposium (SPSympo), Lodz, Poland, 20–23 September 2021; pp. 258–263. [Google Scholar]
- Huang, N.E. Hilbert Huang Transform and Its Applications; World Scientific: Singapore, 2014; p. 302. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wang, G.; Chen, X.Y.; Qiao, F.L.; Wu, Z.; Huang, N.E. On intrinsic mode function. Adv. Adapt. Data Anal. 2010, 2, 277–293. [Google Scholar] [CrossRef]
- Golyandina, N.; Nekrutkin, V.; Zhigljavsky, A.A. Analysis of Time Series Structure: SSA and Related Techniques; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Fontugne, R.; Borgnat, P.; Flandrin, P. Online Empirical Mode Decomposition. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 4306–4310. [Google Scholar] [CrossRef]
- Bhowmik, B.; Krishnan, M.; Hazra, B.; Pakrashi, V. Real-time unified single-and multi-channel structural damage detection using recursive singular spectrum analysis. Struct. Health Monit. 2019, 18, 563–589. [Google Scholar] [CrossRef]
- Byun, W.; Ku, Y.; Kim, J.H.; Kim, H. Fast auditory evoked potential extraction with real-time singular spectrum analysis. Electron. Lett. 2017, 53, 1094–1096. [Google Scholar] [CrossRef]
- Das, K.; Pradhan, S.N. An efficient hardware realization of EMD for real-time signal processing applications. Int. J. Circuit Theory Appl. 2020, 48, 2202–2218. [Google Scholar] [CrossRef]
- Wu, X.; Liu, Y.; Liu, R.; Zhao, L. Surge detection methods using empirical mode decomposition and continuous wavelet transform for a centrifugal compressor. J. Mech. Sci. Technol. 2016, 30, 1533–1536. [Google Scholar] [CrossRef]
- Lin, Y.; Fan, T.; Zheng, X. Roles of recirculating bubble on the performance of centrifugal compressors. Aerosp. Sci. Technol. 2021, 118, 107073. [Google Scholar] [CrossRef]
- Hong, Y.Y.; Bao, Y.Q. FPGA implementation for real-time empirical mode decomposition. IEEE Trans. Instrum. Meas. 2012, 61, 3175–3184. [Google Scholar] [CrossRef]
- Liśkiewicz, G.; Horodko, L.; Stickland, M.; Kryłłowicz, W. Identification of phenomena preceding blower surge by means of pressure spectral maps. Exp. Therm. Fluid Sci. 2014, 54, 267–278. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y. Partly ensemble empirical mode decomposition: An improved noise-assisted method for eliminating mode mixing. Signal Process. 2014, 96, 362–374. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TOA [%] | General Condition | Detailed Condition |
|---|---|---|
| 5–8.5% | Unstable | Deep surge |
| 12–17% | Unstable | Mild surge |
| 18–26% | Transient | Inlet recirculation |
| 27–35% | Stable | Optimum performance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stajuda, M.; García Cava, D.; Liśkiewicz, G. Comparison of Empirical Mode Decomposition and Singular Spectrum Analysis for Quick and Robust Detection of Aerodynamic Instabilities in Centrifugal Compressors. Sensors 2022, 22, 2063. https://doi.org/10.3390/s22052063
Stajuda M, García Cava D, Liśkiewicz G. Comparison of Empirical Mode Decomposition and Singular Spectrum Analysis for Quick and Robust Detection of Aerodynamic Instabilities in Centrifugal Compressors. Sensors. 2022; 22(5):2063. https://doi.org/10.3390/s22052063
Chicago/Turabian StyleStajuda, Mateusz, David García Cava, and Grzegorz Liśkiewicz. 2022. "Comparison of Empirical Mode Decomposition and Singular Spectrum Analysis for Quick and Robust Detection of Aerodynamic Instabilities in Centrifugal Compressors" Sensors 22, no. 5: 2063. https://doi.org/10.3390/s22052063
APA StyleStajuda, M., García Cava, D., & Liśkiewicz, G. (2022). Comparison of Empirical Mode Decomposition and Singular Spectrum Analysis for Quick and Robust Detection of Aerodynamic Instabilities in Centrifugal Compressors. Sensors, 22(5), 2063. https://doi.org/10.3390/s22052063