
Fabrication of Glass Diaphragm Based Fiber-Optic Microphone for Sensitive Detection of Airborne and Waterborne Sounds

Abstract
:1. Introduction
2. Materials and Methods
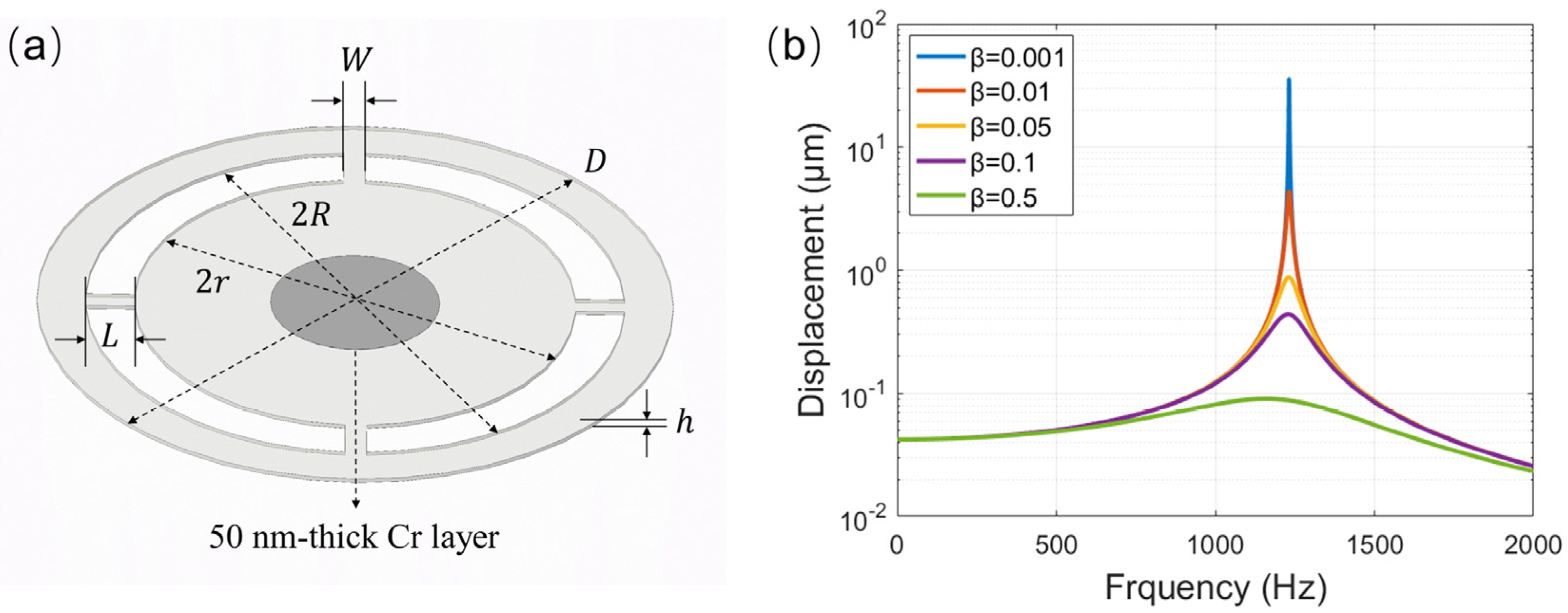
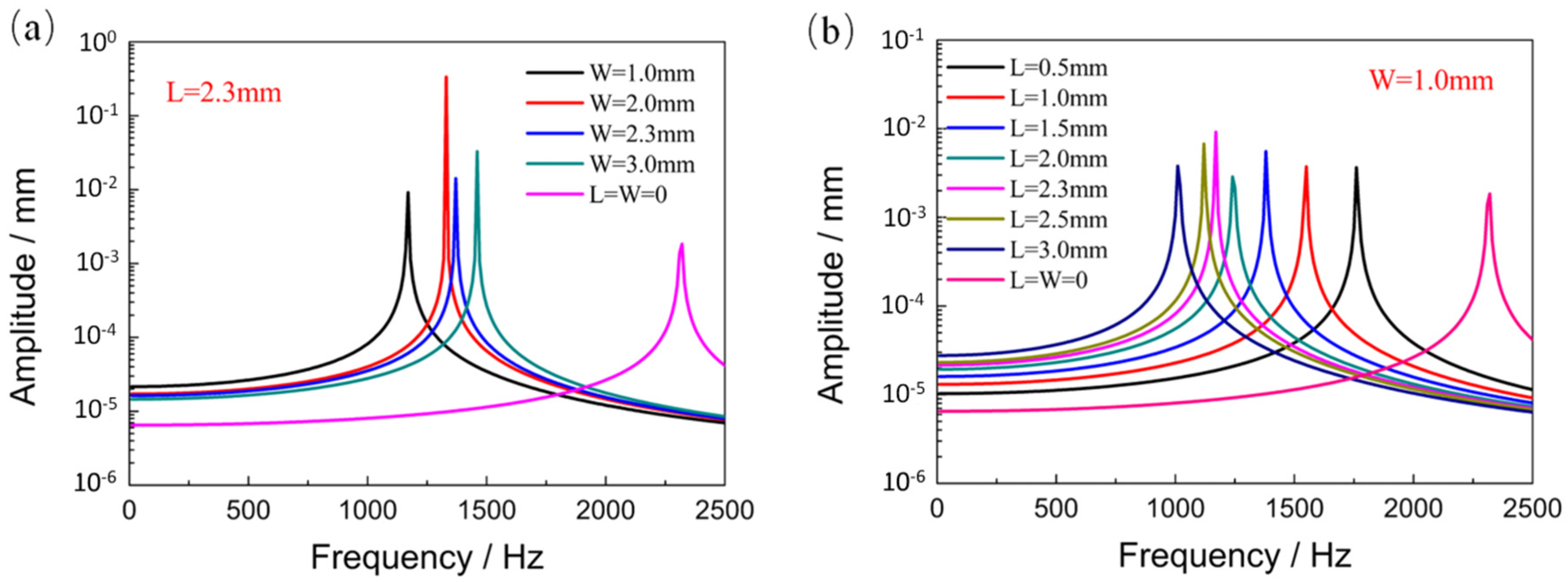
2.1. Simulation of the Wheel-Shaped Glass Diaphragm
2.2. Simulation of the Fiber-Optic Microphone
2.3. Experimental Setup
3. Results and Discussions
3.1. Determination of the FP Cavity Length of the Fiber-Optic Microphone
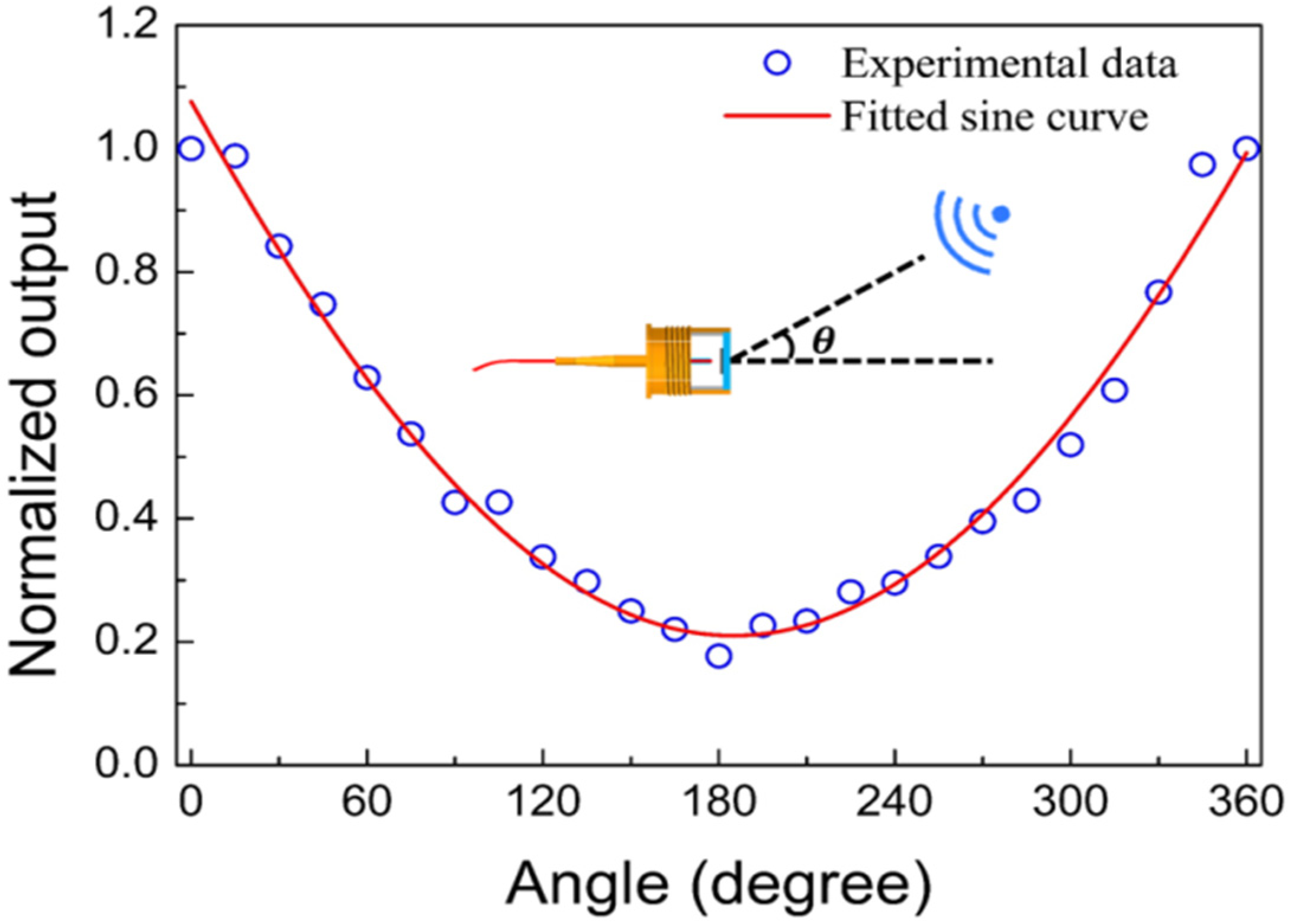
3.2. Responses of the Microphone to Airborne Sounds
3.3. Preliminary Investigation of the Microphone Response to Waterborne Sounds
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, G.; Xiong, L.; Dong, Z.; Liu, X.; Cai, C.; Qi, Z. Development of Highly Sensitive Fiber-optic Acoustic Sensor and Its Preliminary Application for Sound Source Localization. J. Appl. Phys. 2021, 129, 164504. [Google Scholar] [CrossRef]
- Møller, H.; Pedersen, C. Low-frequency noise from large wind turbines. J. Acoust. Soc. Am. 2011, 129, 3727. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, J.; Ren, L.; Ho, S.; Jia, Z.; Song, G. Gas pipeline leakage detection based on PZT sensors. Smart Mater. Struct. 2017, 26, 025022. [Google Scholar] [CrossRef]
- Jathoul, A.; Laufer, J.; Ogunlade, O.; Treeby, B.; Cox, B.; Zhang, E.; Johnson, P.; Pizzey, A.; Philip, B.; Marafioti, T.; et al. Deep in vivo photoacoustic imaging of mammalian tissues using a tyrosinase-based genetic reporter. Nat. Photonics 2015, 9, 239. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, H. Photoacoustic imaging of the eye: A mini review. Photoacoustics 2016, 4, 112–123. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Li, Z.; Tian, Y.; Wang, W.; Pang, Y.; Tam, K. Two dimensional photoacoustic imaging using microfiber interferometric acoustic transducers. Opt. Commun. 2018, 419, 41. [Google Scholar] [CrossRef]
- Gong, Z.; Chen, K.; Chen, Y.; Mei, L.; Yu, Q. Integration of T-type half-open photoacoustic cell and fiber-optic acoustic sensor for trace gas detection. Opt. Express 2019, 27, 18222. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; He, Y.; Bai, X.; Sun, L.; Chen, K.; Kyunghwan, O.H.; Guan, B. Flexible microbubble-based Fabry-Perot cavity for sensitive ultrasound detection and wide-view photoacoustic imaging. Photonics Res. 2020, 8, 1558. [Google Scholar] [CrossRef]
- Bai, X.; Ma, J.; Li, X.; Jin, L.; Guan, B.O. Focus-tunable fiber-laser ultrasound sensor for high-resolution linear-scanning photoacoustic computed tomography. Appl. Phys. Lett. 2020, 116, 153701. [Google Scholar] [CrossRef]
- Chen, M.; Masoudi, A.; Brambilla, G. Performance analysis of distributed optical fiber acoustic sensors based on φ-OTDR. Opt. Express 2019, 27, 9684. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Jiang, J.; Liu, K.; Wang, S.; Ma, Z.; Liang, G.; Ding, Z.; Xu, T.; Liu, T. Self-copy-shift-based differential phase extracting method for fiber distributed acoustic sensing. Chin. Opt. Lett. 2020, 18, 081201. [Google Scholar] [CrossRef]
- Liang, G.; Jiang, J.; Liu, K.; Wang, S.; Xu, T.; Chen, W.; Ma, Z.; Ding, Z.; Zhang, X.; Zhang, Y.; et al. Phase demodulation method based on a dual-identical-chirped-pulse and weak fiber Bragg gratings for quasi-distributed acoustic sensing. Photonics Res. 2020, 8, 1093. [Google Scholar] [CrossRef]
- Ni, W.; Lu, P.; Fu, X.; Zhang, W.; Shun, P.; Sun, H.; Yang, C.; Liu, D.; Shan, J. Ultrathin graphene diaphragm-based extrinsic Fabry-Perot interferometer for ultra-wideband fiber optic acoustic sensing. Opt. Express 2018, 26, 20758. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Zhou, H.; Liu, L. An Optical Fiber Fabry–Perot Microphone Based on Corrugated Silver Diaphragm. IEEE Trans. Instrum. Meas. 2018, 67, 1994. [Google Scholar] [CrossRef]
- Liao, H.; Lu, P.; Liu, L.; Wang, S.; Ni, W.; Fu, X.; Liu, D.; Zhang, J. Phase Demodulation of Short-Cavity Fabry–Perot Interferometric Acoustic Sensors with Two Wavelengths. IEEE Photon. J. 2017, 9, 7102207. [Google Scholar] [CrossRef]
- Cibula, E.; Pevec, S.; Lenardič, B.; Pinet, É.; Ðonlagić, D. Miniature all-glass robust pressure sensor. Opt. Express 2009, 17, 5098. [Google Scholar] [CrossRef] [PubMed]
- Si, W.; Fu, C.; Li, D.; Li, H.; Yuan, P.; Yu, Y. Directional Sensitivity of a MEMS-Based Fiber-Optic Extrinsic Fabry–Perot Ultrasonic Sensor for Partial Discharge Detection. Sensors 2018, 18, 1975. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, M.; Wu, G.; Ren, D.; Gao, R.; Qi, Z.M.; Liang, X. An Optical MEMS Acoustic Sensor Based on Grating Interferometer. Sensors 2019, 19, 1503. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Song, X.; Jian, Z.; Zhang, G.; Liu, M.; Guo, N.; Zhang, W. New Research on MEMS Acoustic Vector Sensors Used in Pipeline Ground Markers. Sensors 2015, 15, 274. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qu, Z.; Lu, P.; Li, Y.; Fu, X.; Zhang, W.; Liu, D.; Zhang, J. Low-frequency acoustic Fabry-Perot fiber sensor based on a micromachined silicon nitride membrane. Chin. Opt. Lett. 2020, 18, 101201. [Google Scholar] [CrossRef]
- Zhao, Y.; Chen, M.Q.; Xia, F.; Lv, R.Q. Small in-fiber Fabry-Perot low-frequency acoustic pressure sensor with PDMS diaphragm embedded in hollow-core fiber. Sens. Actuator A Phys. 2018, 270, 162. [Google Scholar] [CrossRef]
- Dass, S.; Jha, R. Tapered fiber attached nitrile diaphragm-based acoustic sensor. J. Light. Technol. 2017, 35, 5411. [Google Scholar] [CrossRef]
- Ma, J.; Jin, W.; Xuan, H.; Wang, C.; Ho, H. Fiber-optic ferrule-top nanomechanical resonator with multilayer graphene film. Opt. Lett. 2014, 39, 4769. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Yu, C.; Wu, F.; Li, C.; Zhou, J.; Gong, Y.; Rao, Y.; Chen, Y. A Highly Sensitive Fiber-Optic Microphone Based on Graphene Oxide Membrane. J. Light. Technol. 2017, 35, 4344. [Google Scholar] [CrossRef]
- Li, H.; Lv, J.; Li, D.; Xiong, C.; Zhang, Y.; Yu, Y. MEMS-on-fiber ultrasonic sensor with two resonant frequencies for partial discharges detection. Opt. Express 2020, 28, 18431. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Wang, X.; Li, D.; Lv, J.; Yu, Y. MEMS-on-fiber sensor combining silicon diaphragm and supporting beams for on-line partial discharges monitoring. Opt. Express 2020, 28, 29368. [Google Scholar] [CrossRef] [PubMed]
- Lawrence, E.K.; Austin, R.F.; Alan, B.C.; James, V.S. Fundamentals of Acoustics, 4th ed.; Hamilton Press: New York, NY, USA, 2000; pp. 423–425. [Google Scholar]
- Zhu, D.; Tudor, M.J.; Beeby, S.P. Strategies for increasing the operating frequency range of vibration energy harvesters: A review. Meas. Sci. Technol. 2010, 21, 022001. [Google Scholar] [CrossRef]
- Dong, Z.F.; Hu, X.Y.; Ren, D.P. Judgment and Compensation of Deviation of the Optical Interferometric Sensor’s Operating Point from the Interferometer Quadrature Point. J. Light. Technol. 2021, 39, 7008–7017. [Google Scholar] [CrossRef]
- Bucaro, J.A.; Lagakos, N.; Houston, B.H.; Jarzynski, J.; Zalalutdinov, M. Miniature, high performance, low-cost, fiber optic microphone. J. Acoust. Soc. 2005, 118, 1406–1413. [Google Scholar] [CrossRef]
- Ma, J.; Xuan, H.; Ho, H.L.; Jin, W.; Yang, Y.; Fan, S. Fiber-Optic Fabry-Perot Acoustic Sensor with Multilayer Graphene Diaphragm. IEEE Photon. Technol. Lett. 2013, 25, 932–935. [Google Scholar] [CrossRef]
- Chen, K.; Yu, Z.; Guo, M.; Zhao, Z.; Chao, Q.; Gong, Z.; Yang, Y. Fast demodulated white-light interferometry-based fiber-optic Fabry–Perot cantilever microphone. Opt. Lett. 2018, 43, 3417. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diaphragm Type | Diaphragm Thickness | Sensitivity and MDP | Frequency Response Range | Underwater Detection Capability |
|---|---|---|---|---|
| Corrugated silver [14] | ~5 μm | 52 nm/Pa, 86.97 μPa/Hz1/2 @1 kHz | 200 Hz~1 kHz | No |
| PDMS [21] | 9.6 μm | 427 mV/Pa | 10 Hz~50 Hz | No |
| Graphene [31] | 100 nm | 1100 nm/kPa, 60 µPa/Hz1/2 @ 10 kHz | 0.2 Hz~22 kHz | No |
| Silicon [18] | 3 μm | 94 mV/Pa @ 1 kHz | 100 Hz~2.5 kHz | No |
| Stainless steel cantilever [32] | 5 μm | 211.2 nm/Pa, 5 μPa/Hz1/2 @ 1 kHz | below 2 kHz | No |
| Wheel-shaped glass (this work) | 150 μm | 755 mV/Pa, 126 μPa/Hz1/2 @ 500 Hz | 32 Hz~800 Hz | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Hu, X.; Liu, X.; Dong, Z.; Yue, Y.; Cai, C.; Qi, Z.-m. Fabrication of Glass Diaphragm Based Fiber-Optic Microphone for Sensitive Detection of Airborne and Waterborne Sounds. Sensors 2022, 22, 2218. https://doi.org/10.3390/s22062218
Wu G, Hu X, Liu X, Dong Z, Yue Y, Cai C, Qi Z-m. Fabrication of Glass Diaphragm Based Fiber-Optic Microphone for Sensitive Detection of Airborne and Waterborne Sounds. Sensors. 2022; 22(6):2218. https://doi.org/10.3390/s22062218
Chicago/Turabian StyleWu, Gaomi, Xinyu Hu, Xin Liu, Zhifei Dong, Yan Yue, Chen Cai, and Zhi-mei Qi. 2022. "Fabrication of Glass Diaphragm Based Fiber-Optic Microphone for Sensitive Detection of Airborne and Waterborne Sounds" Sensors 22, no. 6: 2218. https://doi.org/10.3390/s22062218
APA StyleWu, G., Hu, X., Liu, X., Dong, Z., Yue, Y., Cai, C., & Qi, Z.-m. (2022). Fabrication of Glass Diaphragm Based Fiber-Optic Microphone for Sensitive Detection of Airborne and Waterborne Sounds. Sensors, 22(6), 2218. https://doi.org/10.3390/s22062218