
A Novel Detection Scheme in Image Domain for Multichannel Circular SAR Ground-Moving-Target Indication

 , , ,
, , ,
Abstract
:1. Introduction
2. Geometry and Signal Model of Multichannel CSAR System
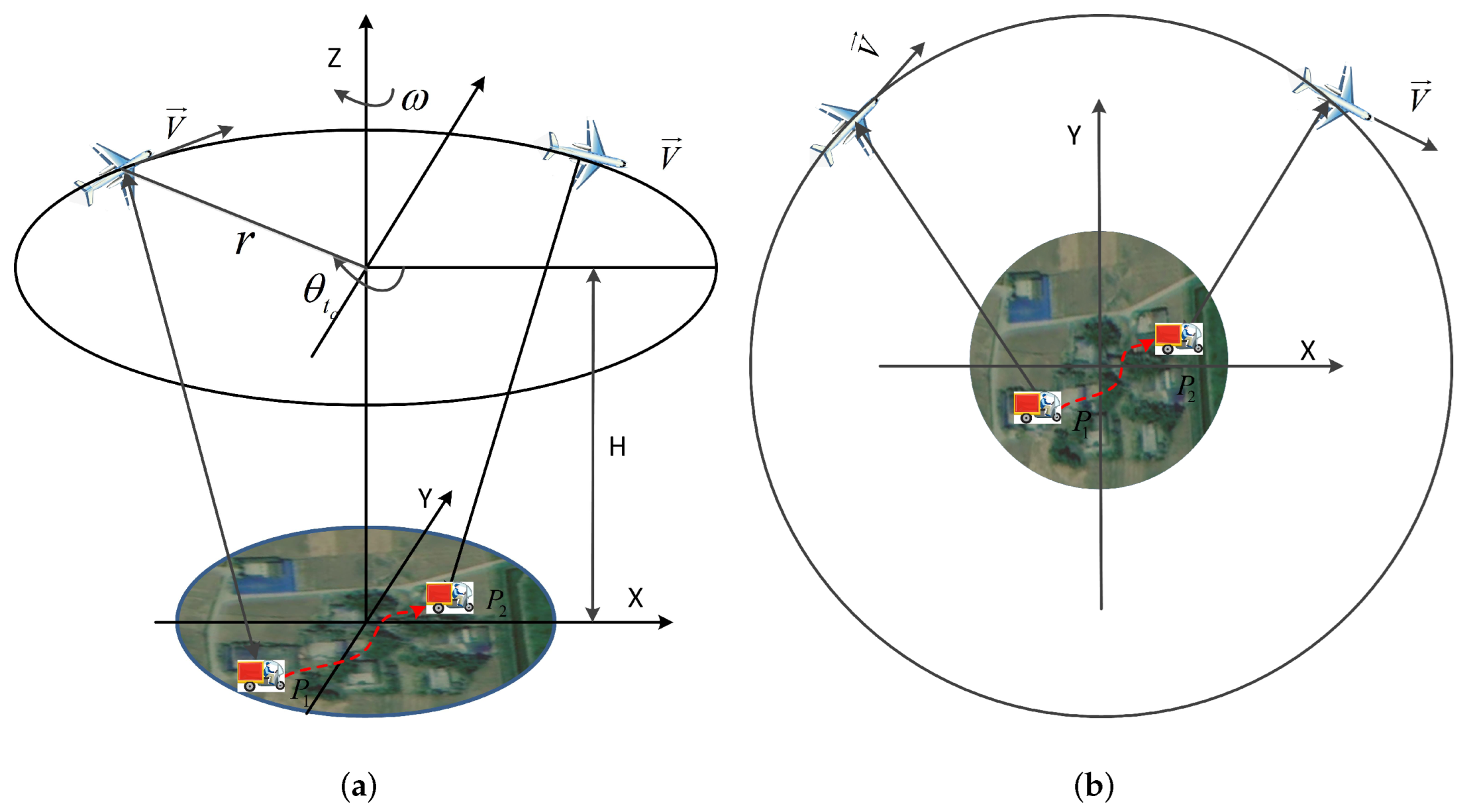
2.1. Geometry
2.2. Signal Model
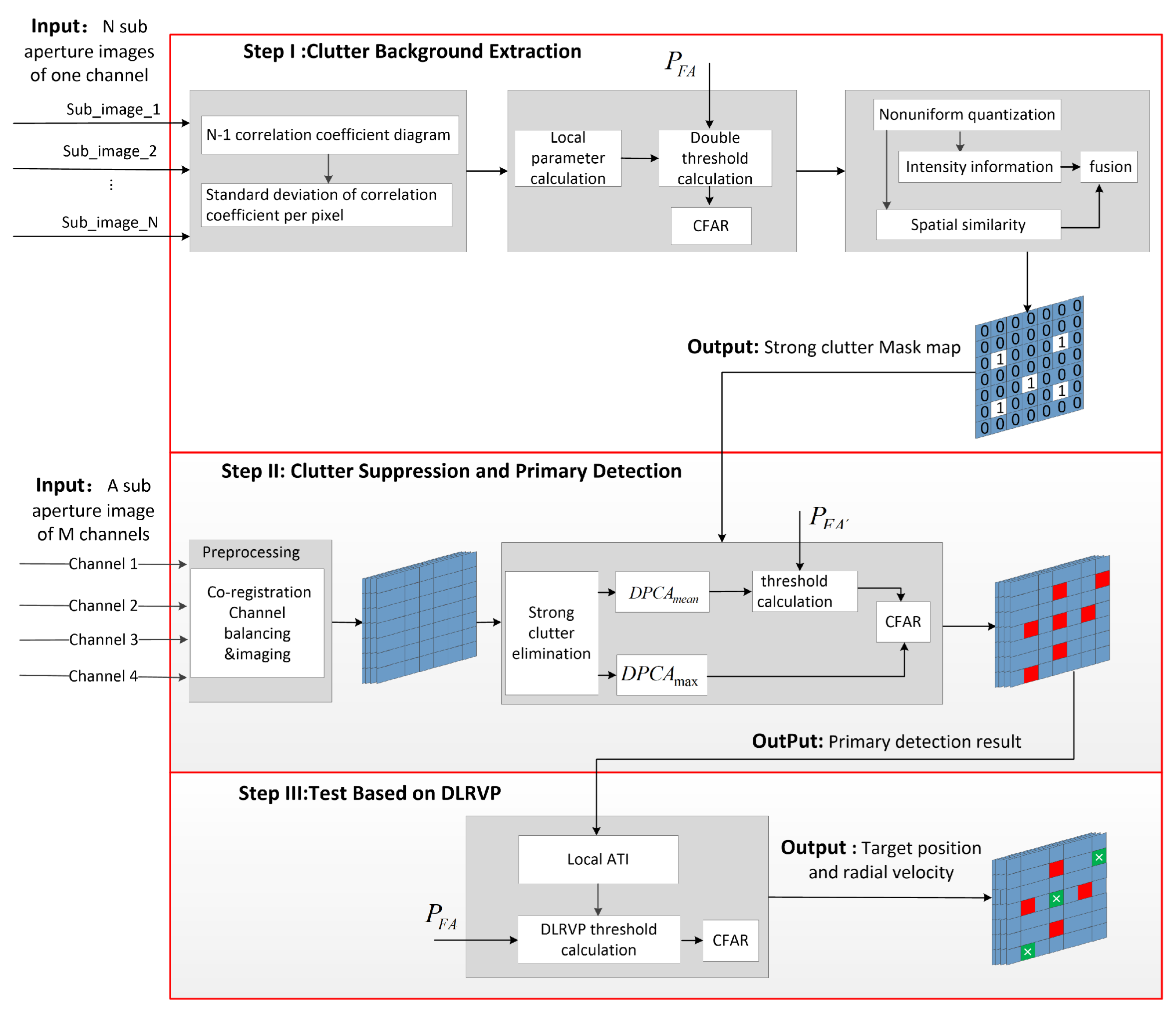
3. The Proposed Detection Scheme for CSAR GMTI
3.1. Step I: Clutter Background Extraction
3.2. Step II: Clutter Suppression and Primary Detection
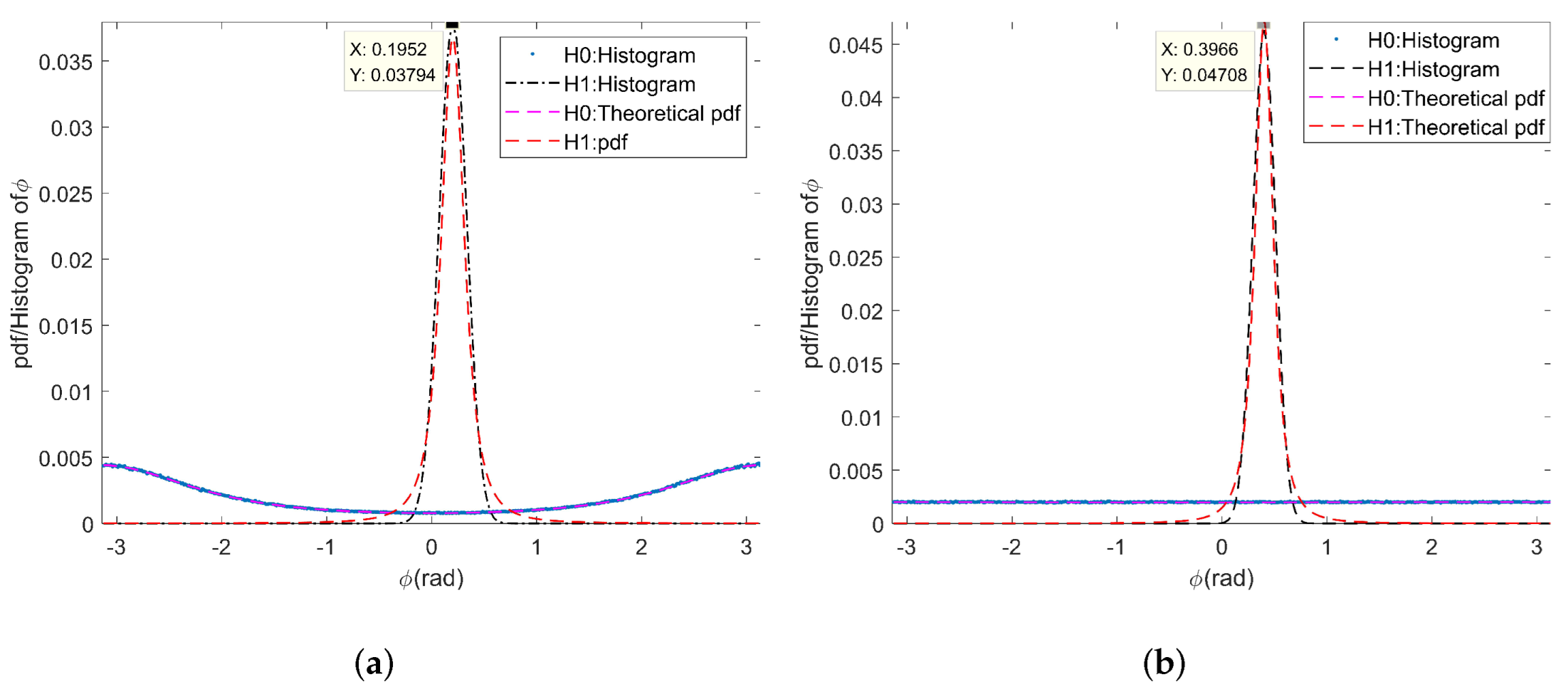
3.3. Step III: A New Test Based on DLRVP
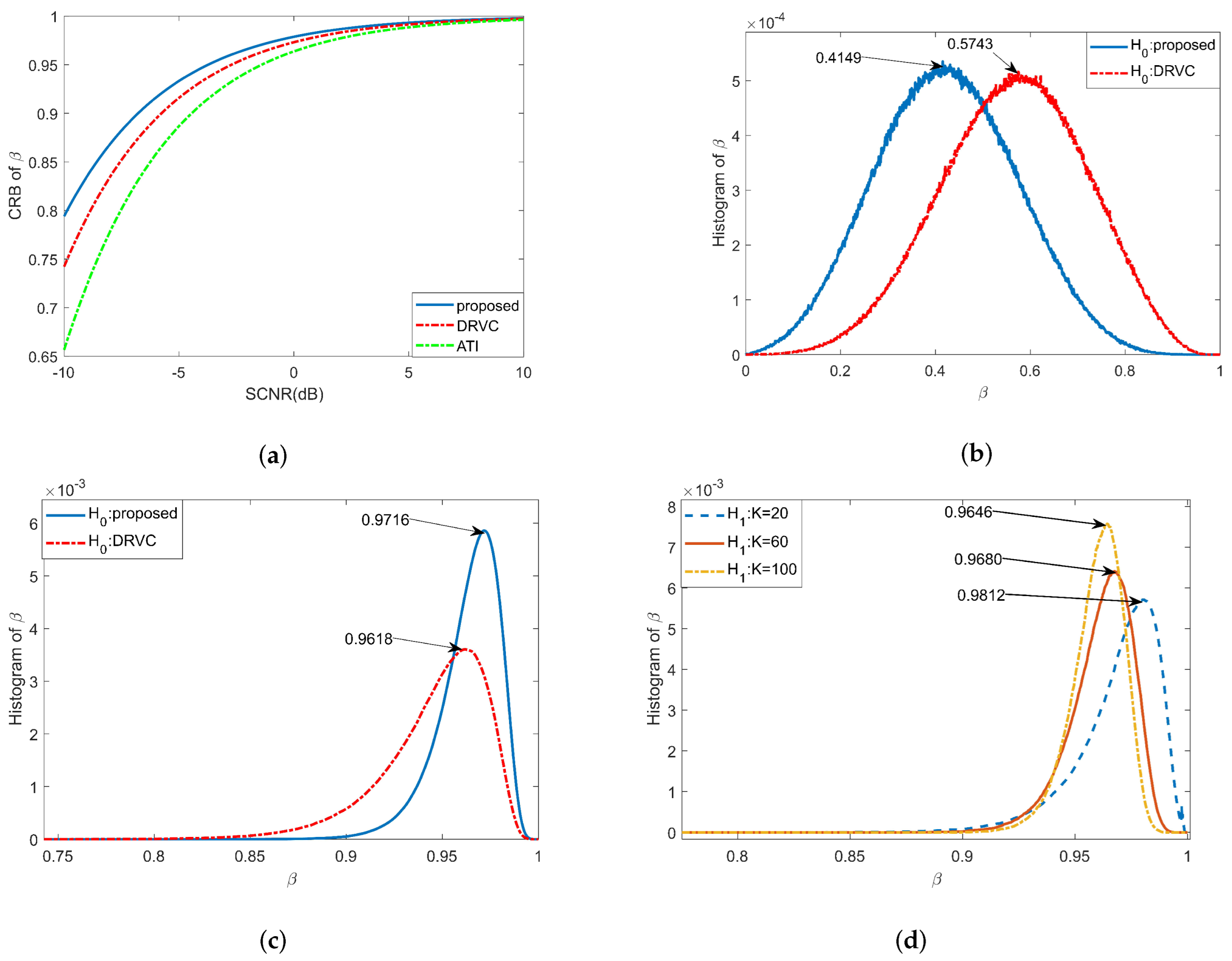
- 1. Peak position analysis of .The CRBs of for three methods with different input SCNR are shown in Figure 8a. As can be seen from the figure, under the same simulation parameters, the peak value of the proposed method is the highest. Figure 8b shows the histogram of the new test and the DRVC test when the moving target is absent, and Figure 8c gives the histogram of above two methods when a moving target is present. When , the theoretical value of is 0.9787, which is quite close to the simulation results in Figure 8c. From the simulation results, we prove that the proposed method can obtain greater value under hypothesis , which means that this method has better detection performance.
- 2. Main factors affecting .Figure 8d shows the histograms of the new test with different values for K (K = 20, 60, and 100). When the K value becomes larger, the peak position moves to the left and the width of PDF becomes narrower, which indicates better moving-target-detection performance. Figure 9a gives the Monte Carlo simulation results of under different inputs for SCNR. When SCNR = −5 dB, the value of has reached 0.9470, indicating that the new detection method can identify weak targets. Figure 9b shows the simulation results of in the range of radial velocities of −1.5 m/s to 1.5 m/s. It can be seen that the new test has a narrower speed notch, which shows that the proposed method has better ability to detect slow targets; also, its minimum detectable speed is lower. The relationship between and CNR is shown in Figure 9c. When CNR = 3 dB, the value of has reached 0.9471, which means that the proposed method can adapt to a low-clutter environment (such as water surface and sea surface).
- 3. Detection performance of the new test.In order to prove the superiority of the proposed method, four existing detection methods (ATI, DPCA, DPCA+ATI, and DRVC) are compared and analyzed under the same simulation conditions. The ROC of the above methods obtained by Monte Carlo simulator is shown as Figure 9d. When the value of is as low as , the value of can still reach 0.9687. However, under this condition, the detection probability of DRVC is just 0.1261, and the detection probability of the other methods is lower. Under the same false-alarm probability, the proposed method can get the highest detection probability because it considers the linear characteristics of interferometric phase between channels.
- 4. Influence of radial velocity fluctuation on the new test.This paper assumes that the motion characteristics of each component of the moving target are consistent. However, in practical situations, factors such as terrain fluctuations, target rotation [48,49], and rapid maneuvers will weaken the consistency of target motion. Therefore, it is necessary to analyze the influence of radial velocity fluctuation on detection performance. The ROC of DRVC and the proposed test with different speed standard deviations are shown in Figure 9e. Under the same simulation conditions, with the increase of , the detection probability of the proposed test and DRVC method decreases. However, the DRVC method has a larger decline, which shows that the proposed method has better speed robustness than the DRVC method and can better adapt to moving targets with certain speed fluctuations.
- Peak position is larger and the false alarm probability is lower;
- Narrower speed notch with a smaller minimum detectable speed;
- Lower input SCNR requirements for moving targets;
- Higher detection probability than the four other methods;
- Stronger speed robustness and can better adapt to speed fluctuation;
- Can better suppress strong static isolated clutter.
4. Experimental Results
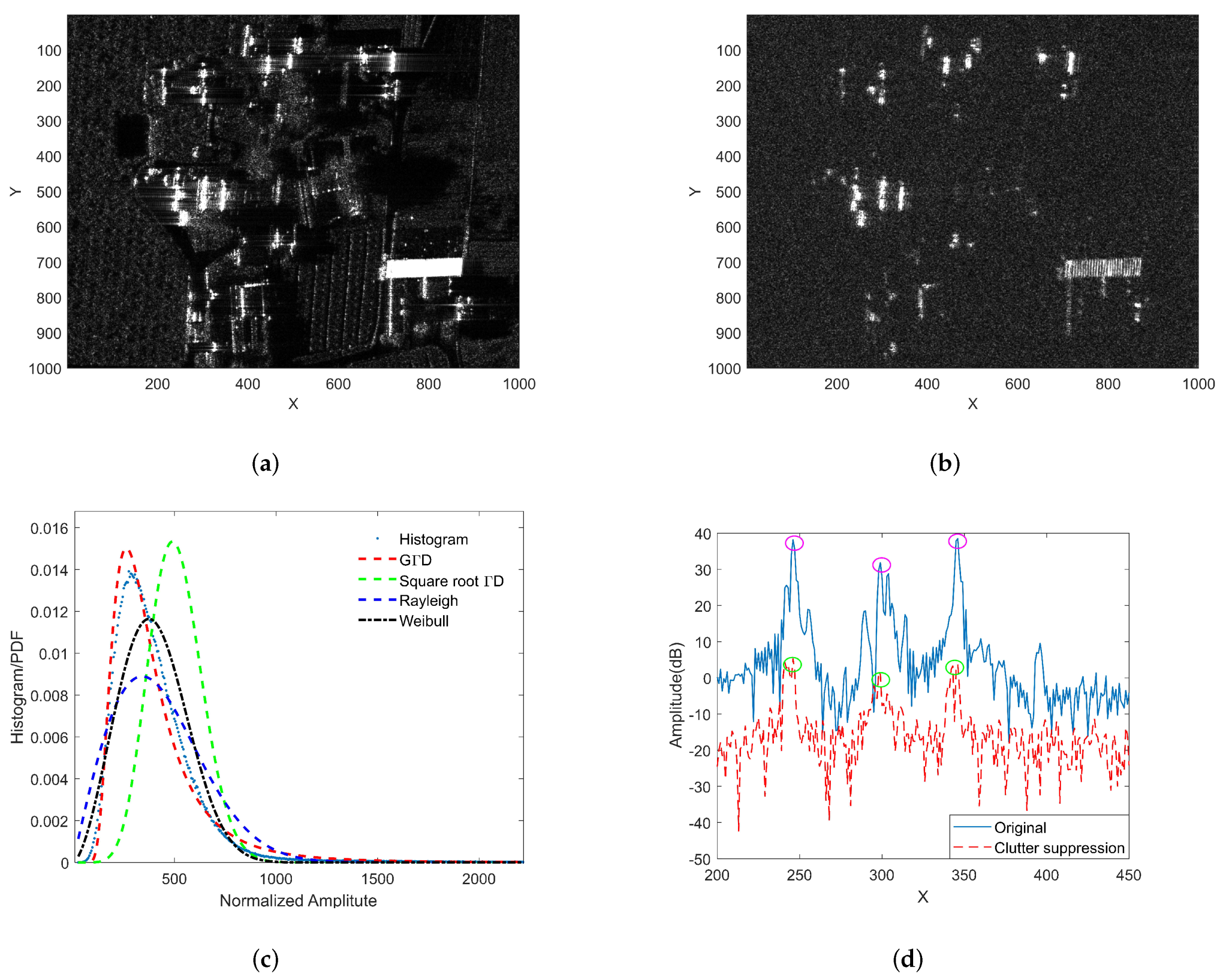
4.1. Experiment A: Clutter Background Extraction
4.2. Experiment B: Clutter Suppression and Primary Detection
4.3. Experiment C: The Proposed Detection Method and Radial Velocity Estimation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Budillon, A.; Gierull, C.H.; Pascazio, V.; Schirinzi, G. Along-Track Interferometric SAR Systems for Ground-Moving Target Indication: Achievements, Potentials, and Outlook. IEEE Geosci. Remote Sens. Mag. 2020, 8, 46–63. [Google Scholar] [CrossRef]
- Zeng, C.; Li, D.; Luo, X.; Song, D.; Liu, H.; Su, J. Ground Maneuvering Targets Imaging for Synthetic Aperture Radar Based on Second-Order Keystone Transform and High-Order Motion Parameter Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4486–4501. [Google Scholar] [CrossRef]
- Huang, P.; Zhang, X.; Zou, Z.; Liu, X.; Liao, G.; Fan, H. Road-Aided Along-Track Baseline Estimation in a Multichannel SAR-GMTI System. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1416–1420. [Google Scholar] [CrossRef]
- Wang, W.; An, D.; Luo, Y.; Zhou, Z. The Fundamental Trajectory Reconstruction Results of Ground Moving Target from Single-Channel CSAR Geometry. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5647–5657. [Google Scholar] [CrossRef]
- Shen, W.; Lin, Y.; Yu, L.; Xue, F.; Hong, W. Single Channel Circular SAR Moving Target Detection Based on Logarithm Background Subtraction Algorithm. Remote Sens. 2018, 10, 742. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Wang, Y.; Liu, B.; Zhang, S.; Nie, L.; Bi, G. A New Motion Parameter Estimation and Relocation Scheme for Airborne Three-Channel CSSAR-GMTI Systems. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4107–4120. [Google Scholar] [CrossRef]
- Wang, L.; Li, Y.; Wang, W.; An, D. Moving Target Indication for Dual-Channel Circular SAR/GMTI Systems. Sensors 2020, 20, 158. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; An, D.; Wang, W.; Zhou, Z.; Chen, M. A Novel Method for Single-Channel CSAR Ground Moving Target Imaging. IEEE Sens. J. 2019, 19, 8642–8649. [Google Scholar] [CrossRef]
- Poisson, J.B.; Oriot, H.M.; Tupin, F. Ground Moving Target Trajectory Reconstruction in Single-Channel Circular SAR. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1976–1984. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Yang, C.; Lin, Q.; Zhang, X. Efficient Parameters Estimation Methods for Radar Moving Targets without Searching. IEEE Access 2020, 8, 41351–41361. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Y.; Xing, M.; Sun, G.C.; Zhang, S.; Xiang, J. A Novel Two-Step Scheme Based on Joint GO-DPCA and Local STAP in Image Domain for Multichannel SAR-GMTI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8259–8272. [Google Scholar] [CrossRef]
- Casalini, E.; Henke, D.; Meier, E. GMTI in Circular Sar Data Using STAP. In Proceedings of the 2016 Sensor Signal Processing for Defence (SSPD), Edinburgh, UK, 22–23 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, W.; Zheng, M.; Zhou, Z.X. Doppler Centroid Estimation for Ground Moving Target in Multichannel HRWS SAR System. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Liu, B.; Yin, K.; Li, Y.; Shen, F.; Bao, Z. An Improvement in Multichannel SAR-GMTI Detection in Heterogeneous Environments. IEEE Trans. Geosci. Remote Sens. 2015, 53, 810–827. [Google Scholar] [CrossRef]
- Suwa, K.; Takahashi, R.; Wakayama, T.; Nakamura, S.; Iwamoto, M. Image based approach for target detection and robust target velocity estimation method for multi-channel SAR-GMTI. In Proceedings of the IGARSS 2013—2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, VIC, Australia, 21–26 July 2013. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. A priori knowledge-based Post-Doppler STAP for traffic monitoring applications. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 6087–6090. [Google Scholar] [CrossRef]
- Zhang, S.X.; Xing, M.D.; Xia, X.G.; Guo, R.; Liu, Y.Y.; Bao, Z. Robust Clutter Suppression and Moving Target Imaging Approach for Multichannel in Azimuth High-Resolution and Wide-Swath Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2015, 53, 687–709. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I. A Generalization of DPCA Processing for Multichannel SAR/GMTI Radars. IEEE Trans. Geosci. Remote Sens. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, X.; Shi, J.; Wei, S. A Novel Ground Moving Target Radial Velocity Estimation Method for Dual-Beam Along-Track Interferometric Sar. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 389–392. [Google Scholar] [CrossRef]
- Hu, X.; Wang, B.; Xiang, M.; Wang, Z. A Novel Airborne Dual-Antenna InSAR Calibration Method for Backprojection Imaging Model. IEEE Access 2021, 9, 43001–43012. [Google Scholar] [CrossRef]
- Wang, X.; Deng, B.; Wang, H.; Qin, Y. Velocity estimation of moving target based on concatenated ATI and inverse radon transform in three-channel circular SAR. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Fall (PIERS-FALL), Singapore, 19–22 November 2017; pp. 1613–1617. [Google Scholar] [CrossRef]
- Shu, Y.; Liao, G.; Yang, Z. Robust Radial Velocity Estimation of Moving Targets Based on Adaptive Data Reconstruction and Subspace Projection Algorithm. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1101–1105. [Google Scholar] [CrossRef]
- Yang, D.; Yang, X.; Liao, G.; Zhu, S. Strong Clutter Suppression via RPCA in Multichannel SAR/GMTI System. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2237–2241. [Google Scholar] [CrossRef]
- Leibovich, M.; Papanicolaou, G.; Tsogka, C. Low Rank Plus Sparse Decomposition of Synthetic Aperture Radar Data for Target Imaging. IEEE Trans. Comput. Imaging 2020, 6, 491–502. [Google Scholar] [CrossRef]
- Li, J.; Huang, Y.; Liao, G.; Xu, J. Moving Target Detection via Efficient ATI-GoDec Approach for Multichannel SAR System. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1320–1324. [Google Scholar] [CrossRef]
- Mu, H.; Zhang, Y.; Jiang, Y.; Ding, C. CV-GMTINet: GMTI Using a Deep Complex-Valued Convolutional Neural Network for Multichannel SAR-GMTI System. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Tian, M.; Yang, Z.; Xu, H.; Liao, G.; Wang, W. An enhanced approach based on energy loss for multichannel SAR-GMTI systems in heterogeneous environment. Digit. Signal Process. 2018, 78, 393–403. [Google Scholar] [CrossRef]
- Sheng, H.; Zhang, C.; Gao, Y.; Wang, K.; Liu, X. Dual-channel SAR moving target detector based on WVD and FAC. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–5. [Google Scholar] [CrossRef]
- An, D.; Wang, W.; Zhou, Z. Refocusing of Ground Moving Target in Circular Synthetic Aperture Radar. IEEE Sens. J. 2019, 19, 8668–8674. [Google Scholar] [CrossRef]
- Ge, B.; An, D.; Zhou, Z. Parameter Estimation and Imaging of Three-Dimensional Moving Target in Dual-Channel CSAR-GMTI Processing. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Teng, F.; Hong, W.; Lin, Y. Aspect Entropy Extraction Using Circular SAR Data and Scattering Anisotropy Analysis. Sensors 2019, 19, 346. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Du, B.; Qiu, X.; Huang, L.; Lei, S.; Lei, B.; Ding, C. Analysis of the Azimuth Ambiguity and Imaging Area Restriction for Circular SAR Based on the Back-Projection Algorithm. Sensors 2019, 19, 4920. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gierull, C.H.; Sikaneta, I.; Cerutti-Maori, D. Two-Step Detector for RADARSAT-2’s Experimental GMTI Mode. IEEE Trans. Geosci. Remote Sens. 2013, 51, 436–454. [Google Scholar] [CrossRef]
- D’Hondt, O.; Guillaso, S.; Hellwich, O. Iterative Bilateral Filtering of Polarimetric SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1628–1639. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Jiang, L.; Xiang, M.; Wei, L.; Zhao, P. Ground slow moving target’s signal analysis for Interferoemtric SAR. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011. [Google Scholar] [CrossRef]
- Martín-de Nicolás, J.; Jarabo-Amores, P.; del Rey-Maestre, N.; Gómez-del Hoyo, P.; Bárcena-Humanes, J.L. Robustness of a Generalized Gamma CFAR ship detector applied to TerraSAR-X and Sentinel-1 images. In Proceedings of the IEEE EUROCON 2015—International Conference on Computer as a Tool (EUROCON), Salamanca, Spain, 8–11 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Yi, C.; Bo, Q.; Shengli, W. DPCA motion compensation technique based on multiple phase centers. In Proceedings of the IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011. [Google Scholar] [CrossRef]
- Gierull, C.H. Closed-Form Expressions for InSAR Sample Statistics and Its Application to Non-Gaussian Data. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3967–3980. [Google Scholar] [CrossRef]
- Ai, J.; Cao, Z.; Mao, Y.; Wang, Z.; Wang, F.; Jin, J. An Improved Bilateral CFAR Ship Detection Algorithm for SAR Image in Complex Environment. J. Radars 2021, 10, 499–515. [Google Scholar] [CrossRef]
- Yun, L. Study on Algorithms for Circular Synthetic Aperture Radar Imaging. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2011. [Google Scholar]
- Leng, X.; Ji, K.; Yang, K.; Zou, H. A Bilateral CFAR Algorithm for Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1536–1540. [Google Scholar] [CrossRef]
- Li, B.; Sun, G.C.; Xing, M.; Hu, Y.; Guo, L.; Bao, Z. Clutter Suppression via Subspace Projection for Spaceborne HRWS Multichannel SAR System. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1538–1542. [Google Scholar] [CrossRef]
- Suwa, K.; Yamamoto, K.; Tsuchida, M.; Nakamura, S.; Wakayama, T.; Hara, T. Image-Based Target Detection and Radial Velocity Estimation Methods for Multichannel SAR-GMTI. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1325–1338. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, F.; Sun, G.C.; Xia, X.G.; Xing, M.D.; Bao, Z. A New SAR–GMTI High-Accuracy Focusing and Relocation Method Using Instantaneous Interferometry. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5564–5577. [Google Scholar] [CrossRef]
- Qin, X.; Zhou, S.; Zou, H.; Gao, G. A CFAR Detection Algorithm for Generalized Gamma Distributed Background in High-Resolution SAR Images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 806–810. [Google Scholar] [CrossRef]
- Yue, D.X.; Xu, F.; Frery, A.C.; Jin, Y.Q. Synthetic Aperture Radar Image Statistical Modeling: Part One-Single-Pixel Statistical Models. IEEE Geosci. Remote Sens. Mag. 2021, 9, 82–114. [Google Scholar] [CrossRef]
- Silva, A.; Baumgartner, S.V.; Krieger, G. Training Data Selection and Update Strategies for Airborne Post-Doppler STAP. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5626–5641. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Huang, J.; Wang, J. Compound helicopter multi-rotor dynamic radar cross section response analysis. Aerosp. Sci. Technol. 2020, 105, 106047. [Google Scholar] [CrossRef]
- Zhang, J. Keen Investigation of the Electromagnetic Scattering Characteristics of Tiltrotor Aircraft Based on Dynamic Calculation Method. Photonics 2021, 8, 175. [Google Scholar] [CrossRef]
- Rahman, S.; Robertson, D.A. Radar micro-Doppler signatures of drones and birds at K-band and W-band. Sci. Rep. 2018, 8, 17396. [Google Scholar] [CrossRef]
- Gao, G.; Shi, G. CFAR Ship Detection in Nonhomogeneous Sea Clutter Using Polarimetric SAR Data Based on the Notch Filter. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4811–4824. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distribution Function | KL | Actual FARs | |
|---|---|---|---|
| Only Step II | Combined Step I and Step II | ||
| 0.03337 | 0.00106 | 0.00003 | |
| Rayleigh | 0.41125 | 0.01131 | 0.00331 |
| Weibull | 1.62303 | 0.01812 | 0.00729 |
| Square root | 1.88569 | 0.01823 | 0.00738 |
| Parameter | Value |
|---|---|
| Wavelength | 0.032 m |
| Channel number | 4 |
| Adjacent channel spacing | 0.1 m |
| Platform velocity | 100 m/s |
| Velocity of moving target | 1 m/s |
| CNR | 13 dB |
| SCR | 5 dB |
| Channel correlation coefficient | 0.96 |
| Clutter heterogeneity | 3.1 |
| Parameter | Value |
|---|---|
| Band width | 2000 MHz |
| Carrier frequency | 10.0 GHz |
| Channel number | 4 |
| Pulse repletion frequency | 2000 Hz |
| Velocity of moving target | <3 m/s |
| Adjacent channel spacing | 0.095 m |
| Platform velocity | 70 m/s |
| Flight radius | 5 km |
| Method | Detection Threshold | Number of Targets |
|---|---|---|
| Step II Only | 1762.5816 | 111 |
| Step I and Step II Combined | 553.9167 | 38 |
| Method | K | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 | ||
| Proposed | 16 | 8 | 8 | 7 | 7 | 7 | 6 | 6 | 6 | 6 | |
| 1.563 | 0.313 | 0.313 | 0.0156 | 0.0156 | 0.0156 | 0 | 0 | 0 | 0 | ||
| DRVC | 70 | 61 | 55 | 48 | 46 | 42 | 42 | 40 | 39 | 35 | |
| 10.000 | 8.594 | 7.656 | 6.563 | 6.250 | 5.625 | 5.625 | 5.313 | 5.156 | 3.125 | ||
| GO-DPCA | 140 | ||||||||||
| 20.938 | |||||||||||
| W-DPCA | 163 | ||||||||||
| 24.531 | |||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Q.; Wang, B.; Xiang, M.; Wang, Z.; Wang, Y.; Song, C. A Novel Detection Scheme in Image Domain for Multichannel Circular SAR Ground-Moving-Target Indication. Sensors 2022, 22, 2596. https://doi.org/10.3390/s22072596
Dong Q, Wang B, Xiang M, Wang Z, Wang Y, Song C. A Novel Detection Scheme in Image Domain for Multichannel Circular SAR Ground-Moving-Target Indication. Sensors. 2022; 22(7):2596. https://doi.org/10.3390/s22072596
Chicago/Turabian StyleDong, Qinghai, Bingnan Wang, Maosheng Xiang, Zhongbin Wang, Yachao Wang, and Chong Song. 2022. "A Novel Detection Scheme in Image Domain for Multichannel Circular SAR Ground-Moving-Target Indication" Sensors 22, no. 7: 2596. https://doi.org/10.3390/s22072596