
Precoder and Decoder Co-Designs for Radar and Communication Spectrum Sharing †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Contributions of This Work
- The multicarrier model of [20] is extended to a more general setting in which multicarrier radar and communication systems coexist. Compared with [20], the resulting generalized multicarrier radar-communication signal model is able to capture a multicarrier radar-communication coexistence scenario and the differences between multicarrier radar and communication waveforms.
- A joint precoder–decoder design is proposed using the max-SINR criterion and IA theory for a multicarrier-multiuser radar-communication coexistence scenario. Specifically, at each user, the signal space and interference space are spanned by columns of the decoder. Consequently, mutual interference between radar and multiuser communication systems can be almost completely eliminated by the proposed joint design.
- For K communication users and one radar user interference channel and assuming that the IA constraint is feasible, the proposed joint precoder–decoder design is able to achieve total DoFs, which is known as the achievable DoF upper bound for the -user interference channel with subcarriers [21]. In other words, if radar waveforms and communication codebooks are appropriately designed, this proposed IA-based design is able to achieve the optimal total information throughput for the entire radar-communication coexistence system. Radar users could obtain better detection performance, diversity gain and interference-free DoFs compared to a subspace-based precoder-only design.
1.3. Brief Overview of Related Work
- Co-design: When hardware modification is possible, radar and communication systems can be jointly designed to maximize joint performance [4,26,27]. One example is a joint Orthogonal Frequency Division Multiplexing (OFDM) radar-communication system: information transmission and target localization tasks can be irrelevantly and simultaneously accomplished by a jointly designed system based on an OFDM signal [28,29]. Furthermore, the works in [30,31,32,33] show that communication information could be embedded into the sidelobe of the radar waveform to develop a co-designed dual-function system.
- Cooperation: Limited information can be shared between radar and communication systems to effectively mitigate interference rather than isolate systems. Bliss et al. presented cooperative joint radar-communications inner bounds in [34,35,36] and extended this concept to MIMO systems [37]. Radar waveforms can be embedded as a pilot signal of communication systems in a doubly selective channel for detection and channel state estimation [38].
- Coexistence: When radar and communication systems coexist, interference management is the key issue. Practically, if the interfering energy is weak or the signal structure is unknown, an interfering signal may be treated as interference, e.g., interference from a Wi-Fi transmitter to a radar receiver. Furthermore, physical separation was introduced in [39,40] to reduce the interfering energy below the noise level. Most of the prior radar-communication spectrum sharing approaches address interference management by exploiting orthogonality [17,18,19,41,42,43] or designing radar and communication signals while guaranteeing acceptable performance [6,7,44,45]. A robust precoder that minimizes power is proposed for coexistence between MIMO radar and downlink multiuser MIMO communication systems in [46]. The works in [22,35] explore information-theoretic bounds for a single joint radar-communication user. The theoretical foundation of joint radar-communication research is established in these studies.
2. Generalized Multicarrier Radar-Communication Coexistence Model
2.1. Transmitter
2.2. Receiver
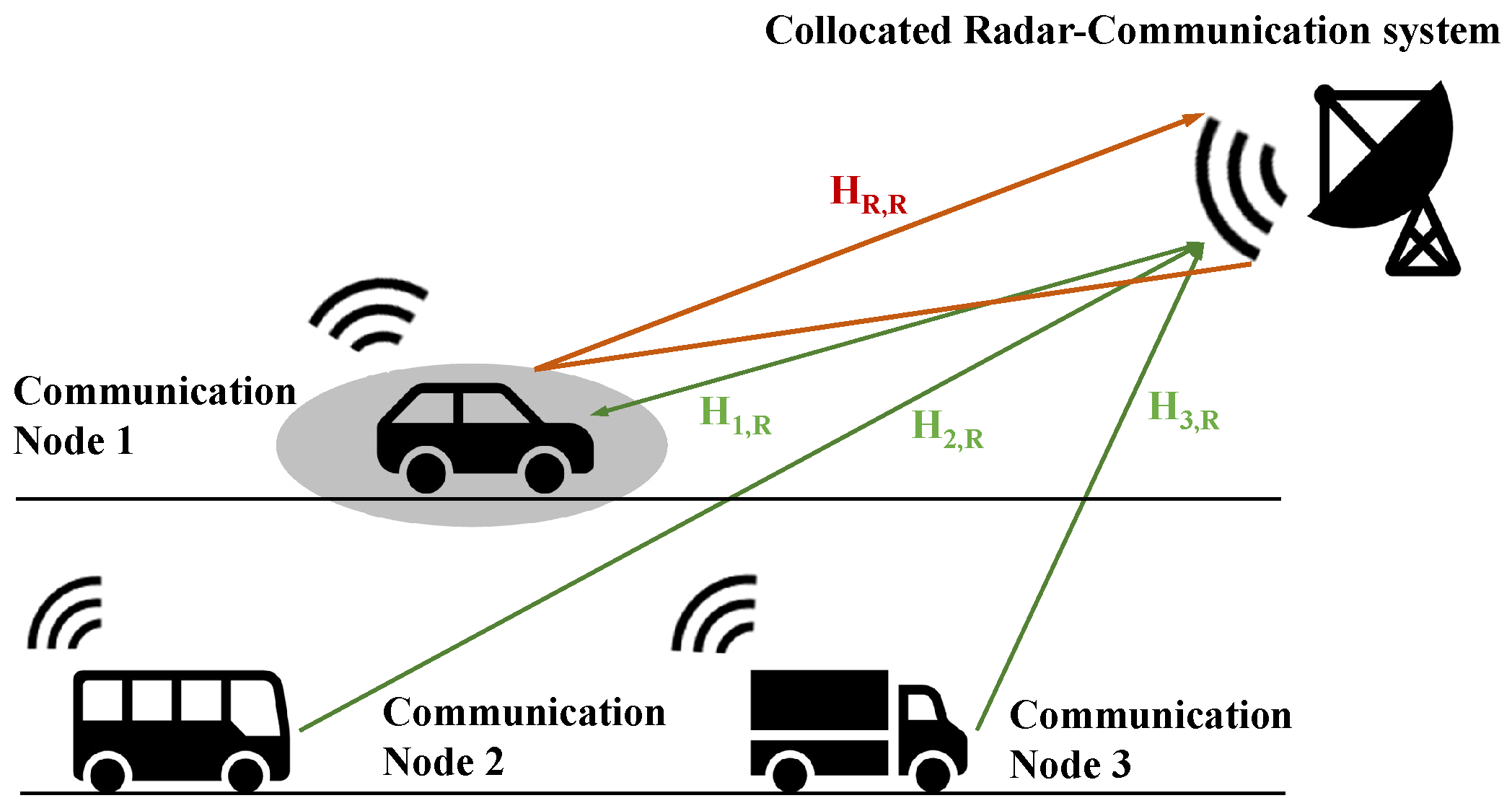
2.3. Multiuser Radar-Communication Spectrum Sharing Scenario
- Channel State Information (CSI): The channels and and the target response matrix are considered to be perfectly estimated at the communication and radar transmitters, respectively. CSI estimation has been applied in communication systems for a long time. For radar, one feasible method is to treat a known radar waveform as a shared pilot in both radar and communication systems. The pilot-aided approach can estimate all the channel information between radar and communication users [38]. Another approach is to embed the same pilot signal in both the radar coherence interval and communication frames [7]. The benefit of the distributed IA method is that CSI is available locally. Moreover, channel reciprocity may be exploited for interference channels.
- Synchronization: Both radar and communication systems are assumed to be synchronized. If they are colocated, then they may share the same clock, in which case, synchronization is not an issue. The other subsystems need to be synchronized in a similar manner to any multiuser communication system; the clock synchronization may be easier in communication systems but still feasible for radar. Existing radar clock synchronization technology may be employed, such as using a Global Navigation Satellite System (GNSS) [58,59], using a pilot signal [60] or using an OFDM frame [61] to achieve time and frequency synchronization [28].
- Shared Information: As shown above, the following information is shared among all users: selection matrix and data covariance . This shared information is needed to calculate the transmitted signal power and consequently to solve the following optimization problem at the lth time slot. Alternatively, the transmitted signal power can be constrained by the power limitation.
- Doppler: In this paper, radar is detecting a far-field point target, and all communication channels are experiencing block fading. The Doppler shift is assumed to be constant during a coherent interval for the L pulse.
- Schedule: The feedback of the channel state matrix, transmission of clock synchronization and shared information call for schedules between the communication and radar systems. Providing channel feedback is common in most modern communication systems and part of the standards. A radar system can also take advantage of feedback and estimate channels. One feasible approach is to transmit information across the radar-coherent interval based on a time division multiplex [7].
3. Max-SINR Joint Precoder–Decoder Design
3.1. Ideal IA Constraints
3.2. Reciprocity and Feasibility of IA
3.3. Distributed Max-SINR Precoder–Decoder Design
| Algorithm 1 Max-SINR design algorithm |
|
4. Simulation Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| scalar, complex path loss | |
| transmitted signal matrix under block fading assumption | |
| communication user set | |
| communication user set that is interfered by radar | |
| communication user set that is not interfered by radar | |
| baseband subcarrier | |
| radar baseband subcarrier | |
| communication baseband subcarrier | |
| division multiplexing modulation matrix | |
| demodulation matrix | |
| radar user set | |
| channel coding matrix | |
| scalar, number of degrees of freedom | |
| interference plus noise covariance matrix | |
| scalar, channel impulse response received for first subcarrier | |
| channel matrix | |
| total number of communication users | |
| total number of blocks/pulses | |
| total number of subpulses | |
| column dimension of precoder matrix, which is user-desired frequency DoFs. | |
| number of transmitted subcarriers | |
| column dimension of data matrix | |
| -dimensional precoding matrix | |
| -dimensional decoding matrix | |
| data vector for Nth time slot | |
| -dimensional data matrix | |
| entire pulse duration | |
| -dimensional Gaussian noise matrix | |
| -dimensional transmitted signal matrix | |
| -dimensional received signal matrix | |
| scalar, delay between transmitted antenna and target | |
| scalar, delay between received antenna and target | |
| target’s direction of arrival | |
| selection matrix | |
| -dimensional all-ones matrix |
Appendix A
- is the index of subpulses, where M is the number of subpulses.
- is the index of channel coded data sequence, where N is the number of channel coded data symbols; it essentially defines user-desired DoFs.
- is the index of data sequence before channel coding, where is the number of original, uncoded data symbols.
- denotes the index of subcarriers, where is the total number of transmitted subcarriers.
- denotes the sample index.
- a is a multiplicity factor between communication symbol duration and radar subpulse duration , where is larger than considering zero-padding in pulse radar. Then, the radar subpulse duration is given by .
- is a scalar with respect to the nth subcarrier and yth data symbol, denotes the coding operator for radar signal and the channel coding operator in the communication signal; e.g., it will be for P3 or P4 radar code and an element of the Turbo generator matrix for Turbo code.
- is scalar data corresponding to the yth data symbol and mth subpulse, which is random for the payload communication signal and known in radar applications because the transmitted waveform information is known by its receiver.
- is a scalar that denotes the precoding coefficient with respect to the kth subcarrier and nth subpulse before the signal emitted.
Appendix B
References
- Holdren, J.; Lander, E. Realizing the Full Potential of Government-Held Spectrum to Spur Economic Growth; President’s Council of Advisors on Science and Technology. 2012. Available online: https://obamawhitehouse.archives.gov/sites/default/files/microsites/ostp/gorenberg_ppt.pdf (accessed on 1 March 2022).
- Commission, F.C. Enabling innovative small cell use in 3.5 GHz band NPRM & order. FCC 2012, 12, 148. Available online: https://www.fcc.gov/document/enabling-innovative-small-cell-use-35-ghz-band-nprm-order/attachment (accessed on 1 March 2022).
- Locke, G.; Strickling, L.; Secretary, A. An assessment of the near-term viability of accommodating wireless broadband systems in the 1675–1710 mhz, 1755–1780 mhz, 3500–3650 mhz, and 4200–4220 mhz, 4380–4400 mhz bands. October 2010; pp. 3500–3650. Available online: https://www.ntia.doc.gov/report/2010/assessment-near-term-viability-accommodating-wireless-broadbandsystems-1675-1710-mhz-17 (accessed on 1 March 2022).
- Liu, F.; Cui, Y.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C.; Buzzi, S. Integrated Sensing and Communications: Towards Dual-functional Wireless Networks for 6G and Beyond. IEEE J. Sel. Areas Commun. 2022, 40, 1. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, F.; Jing, X.; Mu, J. Integrating Sensing and Communications for Ubiquitous IoT: Applications, Trends, and Challenges. IEEE Netw. 2021, 35, 158–167. [Google Scholar] [CrossRef]
- Li, B.; Kumar, H.; Petropulu, A.P. A joint design approach for spectrum sharing between radar and communication systems. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3306–3310. [Google Scholar]
- Li, B.; Petropulu, A.P. Joint Transmit Designs for Coexistence of MIMO Wireless Communications and Sparse Sensing Radars in Clutter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2846–2864. [Google Scholar] [CrossRef]
- 3GPP. Evolved Universal Terrestrial Radio Access (E-UTRA); Radio Resource Control (RRC); Protocol Specification. Technical Specification (TS) 36.331, 3rd Generation Partnership Project (3GPP), 2017. Version 14.2.2. Available online: http://www.arib.or.jp/english/html/overview/doc/STD-T63v10_40/5_Appendix/Rel8/36/36331-8k0.pdf (accessed on 1 March 2022).
- IEEE 802.16-2001; IEEE Standard for Local and Metropolitan Area Networks–Part 16: Air Interface for Fixed Broadband Wireless Access Systems. IEEE: Piscataway, NJ, USA, 2002.
- IEEE 802.16e/D5-2004; Part 16: Air Interface for Fixed and Mobile Broadband Wireless Access Systems—Amendment for Physical and Medium Access Control Layers for Combined Fixed and Mobile Operation in Licensed Bands. IEEE: Piscataway, NJ, USA, 2004.
- Levanon, N. Multifrequency radar signals. In Proceedings of the Record of the IEEE 2000 International Radar Conference, Alexandria, VA, USA, 7–12 May 2000; pp. 683–688. [Google Scholar]
- Levanon, N.; Mozeson, E. Multicarrier radar signal-pulse train and CW. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 707–720. [Google Scholar] [CrossRef]
- Sen, S.; Tang, G.; Nehorai, A. Multiobjective optimization of OFDM radar waveform for target detection. IEEE Trans. Signal Process. 2011, 59, 639–652. [Google Scholar] [CrossRef]
- Sen, S.; Nehorai, A. Adaptive OFDM radar for target detection in multipath scenarios. IEEE Trans. Signal Process. 2011, 59, 78–90. [Google Scholar] [CrossRef]
- Bica, M.; Huang, K.W.; Koivunen, V.; Mitra, U. Mutual information based radar waveform design for joint radar and cellular communication systems. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3671–3675. [Google Scholar]
- Shi, C.; Wang, F.; Sellathurai, M.; Zhou, J.; Salous, S. Power minimization based robust OFDM radar waveform design for radar and communication systems in coexistence. IEEE Trans. Signal Process. 2017, 66, 1316–1330. [Google Scholar] [CrossRef] [Green Version]
- Sodagari, S.; Khawar, A.; Clancy, T.C.; McGwier, R. A projection based approach for radar and telecommunication systems coexistence. In Proceedings of the 2012 Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 5010–5014. [Google Scholar]
- Mahal, J.A.; Khawar, A.; Abdelhadi, A.; Clancy, T.C. Spectral Coexistence of MIMO Radar and MIMO Cellular System. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 655–668. [Google Scholar] [CrossRef]
- Khawar, A.; Abdel-Hadi, A.; Clancy, T.C.; McGwier, R. Beampattern analysis for MIMO radar and telecommunication system coexistence. In Proceedings of the 2014 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 3–6 February 2014; pp. 534–539. [Google Scholar]
- Bica, M.; Koivunen, V. Generalized multicarrier radar: Models and performance. IEEE Trans. Signal Process. 2016, 64, 4389–4402. [Google Scholar] [CrossRef]
- Wu, Y.; Shamai, S.; Verdú, S. Degrees of freedom of the interference channel: A general formula. In Proceedings of the 2011 IEEE International Symposium on Information Theory Proceedings (ISIT), Saint-Petersburg, Russia, 31 July–5 August 2011; pp. 1362–1366. [Google Scholar]
- Chiriyath, A.R.; Paul, B.; Bliss, D.W. Radar-Communications Convergence: Coexistence, Cooperation, and Co-Design. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 1–12. [Google Scholar] [CrossRef]
- Bhattarai, S.; Park, J.M.J.; Gao, B.; Bian, K.; Lehr, W. An overview of dynamic spectrum sharing: Ongoing initiatives, challenges, and a roadmap for future research. IEEE Trans. Cogn. Commun. Netw. 2016, 2, 110–128. [Google Scholar] [CrossRef]
- Li, X.; Cui, Y.; Zhang, J.A.; Liu, F.; Jing, X.; Dobre, O.A. Assisting Living by Wireless Sensing: The Role of Integrated Sensing and Communications in 6G Era. arXiv 2022, arXiv:2202.09522. [Google Scholar]
- Zhang, J.A.; Liu, F.; Masouros, C.; Heath, R.W.; Feng, Z.; Zheng, L.; Petropulu, A. An Overview of Signal Processing Techniques for Joint Communication and Radar Sensing. IEEE J. Sel. Top. Signal Process. 2021, 15. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, F.; Yuan, W.; Mu, J.; Jing, X.; Ng, D.W.K. Optimal Precoding Design for Monostatic ISAC Systems: MSE Lower Bound and DoF Completion. arXiv 2022, arXiv:2203.06409. [Google Scholar]
- Liu, F.; Liu, Y.F.; Li, A.; Masouros, C.; Eldar, Y.C. Cramér-Rao Bound Optimization for Joint Radar-Communication Beamforming. IEEE Trans. Signal Process. 2022, 70, 240–253. [Google Scholar] [CrossRef]
- Sit, Y.L.; Sturm, C.; Reichardt, L.; Zwick, T.; Wiesbeck, W. The OFDM joint radar-communication system: An overview. In Proceedings of the Third International Conference Advances in Satellite and Space Communications, Budapest, Hungary, 17–22 April 2011; pp. 69–74. [Google Scholar]
- Sit, Y.L.; Reichardt, L.; Sturm, C.; Zwick, T. Extension of the OFDM joint radar-communication system for a multipath, multiuser scenario. In Proceedings of the 2011 IEEE RadarCon (RADAR), Kansas City, MO, USA, 23–27 May 2011; pp. 718–723. [Google Scholar]
- Blunt, S.D.; Cook, M.R.; Stiles, J. Embedding information into radar emissions via waveform implementation. In Proceedings of the 2010 International Waveform Diversity and Design Conference, Niagara Falls, ON, Canada, 8–13 August 2010; pp. 000195–000199. [Google Scholar]
- Euziere, J.; Guinvarc’h, R.; Lesturgie, M.; Uguen, B.; Gillard, R. Dual function radar communication time-modulated array. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–4. [Google Scholar]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. A dual function radar-communications system using sidelobe control and waveform diversity. In Proceedings of the 2015 IEEE Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 1260–1263. [Google Scholar]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. Signaling strategies for dual-function radar-communications: An overview. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 36–45. [Google Scholar] [CrossRef]
- Bliss, D.W. Cooperative radar and communications signaling: The estimation and information theory odd couple. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 0050–0055. [Google Scholar]
- Chiriyath, A.R.; Paul, B.; Jacyna, G.M.; Bliss, D.W. Inner bounds on performance of radar and communications co-existence. IEEE Trans. Signal Process. 2016, 64, 464–474. [Google Scholar] [CrossRef]
- Chiriyath, A.R.; Paul, B.; Bliss, D.W. Joint radar-communications information bounds with clutter: The phase noise menace. In Proceedings of the 2016 Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Rong, Y.; Chiriyath, A.R.; Bliss, D.W. Multiple-antenna multiple-access joint radar and communications systems performance bounds. In Proceedings of the 2017 51st Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 29 October–1 November 2017; pp. 1296–1300. [Google Scholar]
- Harper, A.; Reed, J.; Odom, J.; Lanterman, A.; Ma, X. Performance of a Linear-Detector Joint Radar-Communication System in Doubly-Selective Channels. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 703–715. [Google Scholar] [CrossRef]
- Lackpour, A.; Luddy, M.; Winters, J. Overview of interference mitigation techniques between WiMAX networks and ground based radar. In Proceedings of the 2011 20th Annual Wireless and Optical Communications Conference (WOCC), Newark, NJ, USA, 15–16 April 2011; pp. 1–5. [Google Scholar]
- Hessar, F.; Roy, S. Spectrum sharing between a surveillance radar and secondary Wi-Fi networks. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1434–1448. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; McGeehan, J.; Williams, C.; Doufexi, A. Application of cooperative sensing in radar–communications coexistence. IET Commun. 2008, 2, 856–868. [Google Scholar] [CrossRef]
- Saruthirathanaworakun, R.; Peha, J.M.; Correia, L.M. Opportunistic sharing between rotating radar and cellular. IEEE J. Sel. Areas Commun. 2012, 30, 1900–1910. [Google Scholar] [CrossRef]
- Bica, M.; Huang, K.W.; Mitra, U.; Koivunen, V. Opportunistic radar waveform design in joint radar and cellular communication systems. In Proceedings of the 2015 Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–7. [Google Scholar]
- Li, B.; Petropulu, A.P.; Trappe, W. Optimum co-design for spectrum sharing between matrix completion based MIMO radars and a MIMO communication system. IEEE Trans. Signal Process. 2016, 64, 4562–4575. [Google Scholar] [CrossRef] [Green Version]
- Zheng, L.; Lops, M.; Wang, X.; Grossi, E. Joint Design of Overlaid Communication Systems and Pulsed Radars. arXiv 2017, arXiv:1703.10184. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C.; Li, A.; Ratnarajah, T.; Zhou, J. Interference exploitation for radar and cellular coexistence the power efficient approach. In Proceedings of the 5th Colloquium on Antennas, Wireless and Electromagnetics (CAWE 2017), London, UK, 8 June 2017. [Google Scholar]
- Carleial, A. A case where interference does not reduce capacity (corresp.). IEEE Trans. Inf. Theory 1975, 21, 569–570. [Google Scholar] [CrossRef]
- Sato, H. The capacity of the Gaussian interference channel under strong interference (corresp.). IEEE Trans. Inf. Theory 1981, 27, 786–788. [Google Scholar] [CrossRef]
- Etkin, R.H.; David, N.; Wang, H. Gaussian interference channel capacity to within one bit. IEEE Trans. Inf. Theory 2008, 54, 5534–5562. [Google Scholar] [CrossRef] [Green Version]
- Cadambe, V.R.; Jafar, S.A. Interference alignment and degrees of freedom of the-user interference channel. IEEE Trans. Inf. Theory 2008, 54, 3425–3441. [Google Scholar] [CrossRef] [Green Version]
- Bekkerman, I.; Tabrikian, J. Target detection and localization using MIMO radars and sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S. Diversity gain for MIMO Neyman–Pearson signal detection. IEEE Trans. Signal Process. 2011, 59, 869–881. [Google Scholar] [CrossRef]
- Vu, M.; Paulraj, A. MIMO wireless linear precoding. IEEE Signal Process. Mag. 2007, 24, 86–105. [Google Scholar] [CrossRef]
- Ma, M.; Huang, X.; Jiao, B.; Guo, Y.J. Optimal orthogonal precoding for power leakage suppression in DFT-based systems. IEEE Trans. Commun. 2011, 59, 844–853. [Google Scholar] [CrossRef]
- Declercq, D.; Fossorier, M.; Biglieri, E. Channel Coding: Theory, Algorithms, and Applications: Academic Press Library in Mobile and Wireless Communications; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Polyanskiy, Y.; Poor, H.V.; Verdú, S. Channel coding rate in the finite blocklength regime. IEEE Trans. Inf. Theory 2010, 56, 2307–2359. [Google Scholar] [CrossRef]
- Skolnik, M.I. Radar Handbook; McGrwa-Hill: New York, NY, USA, 1970. [Google Scholar]
- Yulin, H.; Jianyu, Y.; Jintao, X. Synchronization technology of bistatic radar system. In Proceedings of the 2006 International Conference on Communications, Circuits and Systems, Guilin, China, 25–28 June 2006; Volume 4, pp. 2219–2221. [Google Scholar]
- Wang, W.Q. GPS-based time & phase synchronization processing for distributed SAR. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1040–1051. [Google Scholar]
- Wang, W. Approach of adaptive synchronization for bistatic SAR real-time imaging. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2695–2700. [Google Scholar] [CrossRef]
- Schmidl, T.M.; Cox, D.C. Robust frequency and timing synchronization for OFDM. IEEE Trans. Commun. 1997, 45, 1613–1621. [Google Scholar] [CrossRef] [Green Version]
- Gomadam, K.; Cadambe, V.R.; Jafar, S.A. A distributed numerical approach to interference alignment and applications to wireless interference networks. IEEE Trans. Inf. Theory 2011, 57, 3309–3322. [Google Scholar] [CrossRef]
- Papailiopoulos, D.S.; Dimakis, A.G. Interference alignment as a rank constrained rank minimization. IEEE Trans. Signal Process. 2012, 60, 4278–4288. [Google Scholar] [CrossRef] [Green Version]
- Bresler, G.; Cartwright, D.; Tse, D. Feasibility of interference alignment for the MIMO interference channel: The symmetric square case. In Proceedings of the Information Theory Workshop (ITW), Paraty, Brazil, 16–20 October 2011; pp. 447–451. [Google Scholar]
- Du, G.L.; Zou, W.X.; Zhou, Z.; Liu, J.H. On feasibility of linear interference alignment for single-input–single-output multi-frequency interference channel. IET Commun. 2014, 8, 2207–2212. [Google Scholar] [CrossRef]
- Wang, X.; Serpedin, E. An Overview on the Applications of Matrix Theory in Wireless Communications and Signal Processing. Algorithms 2016, 9, 68. [Google Scholar] [CrossRef] [Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, Y.; Koivunen, V.; Jing, X. Precoder and Decoder Co-Designs for Radar and Communication Spectrum Sharing. Sensors 2022, 22, 2619. https://doi.org/10.3390/s22072619
Cui Y, Koivunen V, Jing X. Precoder and Decoder Co-Designs for Radar and Communication Spectrum Sharing. Sensors. 2022; 22(7):2619. https://doi.org/10.3390/s22072619
Chicago/Turabian StyleCui, Yuanhao, Visa Koivunen, and Xiaojun Jing. 2022. "Precoder and Decoder Co-Designs for Radar and Communication Spectrum Sharing" Sensors 22, no. 7: 2619. https://doi.org/10.3390/s22072619
APA StyleCui, Y., Koivunen, V., & Jing, X. (2022). Precoder and Decoder Co-Designs for Radar and Communication Spectrum Sharing. Sensors, 22(7), 2619. https://doi.org/10.3390/s22072619