
Review of Recent Bio-Inspired Design and Manufacturing of Whisker Tactile Sensors


Abstract
:1. Introduction
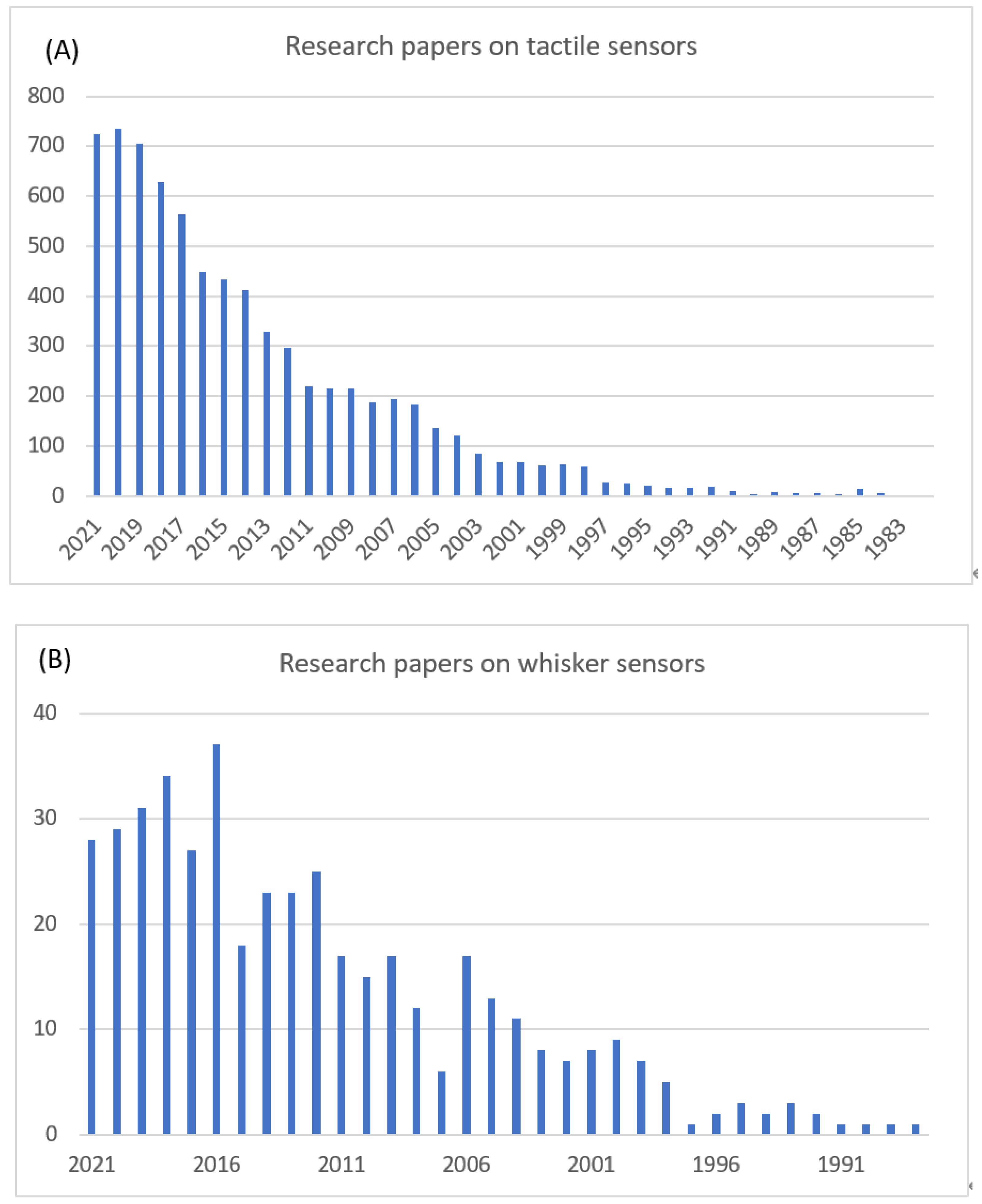
1.1. Growth of Tactile Sensors
1.2. Bio-Whisker Fundamentals
1.2.1. Motion of the Bio-Whiskers
1.2.2. Bio-Whiskers Interaction with Objects
1.3. Growth of Bioinspired Whisker Sensors
2. Tactile Sensing Techniques and Related Sensitivity
2.1. Tactile Sensing at a Macroscale
2.2. Tactile Sensing at a Micro-/Nanoscale
2.3. Sensitivity
2.4. Direction of Sensitivity
2.4.1. Detection along One Axis (Up or Down)
2.4.2. Detection along Two or Three Axes
3. Core Materials in Tactile Sensors
4. Manufacturing Methods
4.1. Normal Scale Manufacturing
4.2. Micro- and Nanoscale Manufacturing Processes
5. Durability, Cyclic Loading, and Recovery Time
6. Applications

| Applications | Enabled Functions and Features |
|---|---|
| Biomimetic tactile | Collecting tactile information: Enhancing the extracted tactile sensing feedback data i.e., human fingertip, resulting from the direct external stimuli by measuring the deformation in prosthetic hands which are measured by means of electrical impedance [77] |
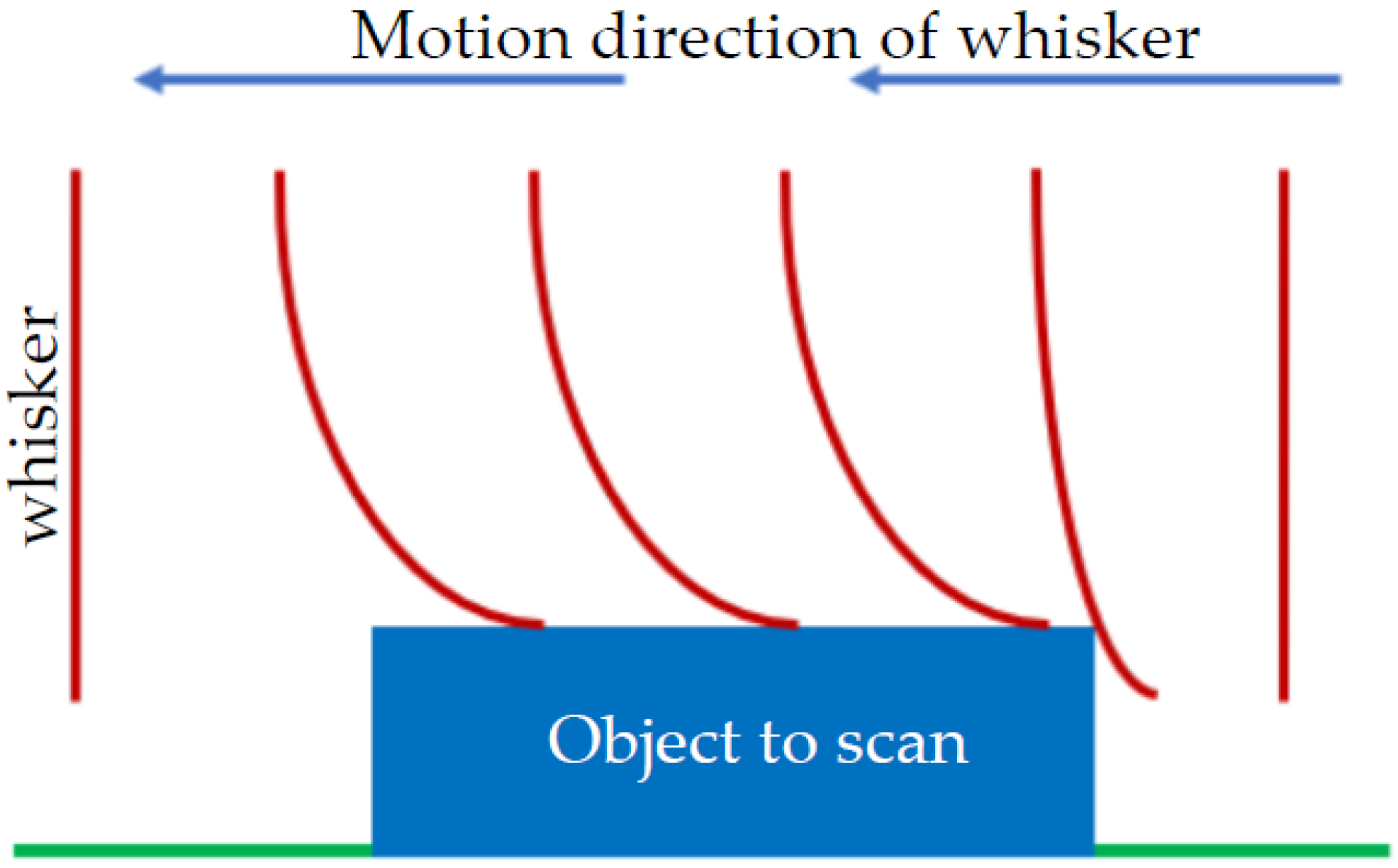
| Tactile sensors for robotics | Recognize the surrounding objects: Whiskers are used to determine the three-dimensional (3D) location of the contacted object [78,79]. Study the surface texture: Whiskers can be used to show the surface texture accurately by analyzing the obtained data from the whisking against different surfaces [58,80]. (Figure 10) Detecting gases’ flow: A highly sensitive whisker can be used to detect a real-time gas flow in two and three dimensions [5,29]. Obstacle recognition: Whiskers are used to sense the environmental obstacles by detecting the surrounding environment in different directions [65]. Tactile: Sense motion of heart valve due to its flexibility [81]. |
| Navigation in dark or for blinds | This can be useful for autonomous robotics moving in dark places just like rats do it deliberately in dark- whisking mode. |
| Air object detection | Ensure the safety of drones during flight: Without the need for direct contact with the main body, whiskers can detect the variation in air pressure around the flying objects. [82] |
| Unmanned underwater vehicles | Detect the water flow: Whisker sensor is able to detect minute disturbances underwater [1,53], and reduce vortex induced vibrations [83]. |
| Minimal invasive surgeries (MIS) | Measure the mechanical behavior: A micro whisker transducer is capable of detecting force, motion, and mechanical impedance from the electrical signals of the actuator itself [54,56,61]. |
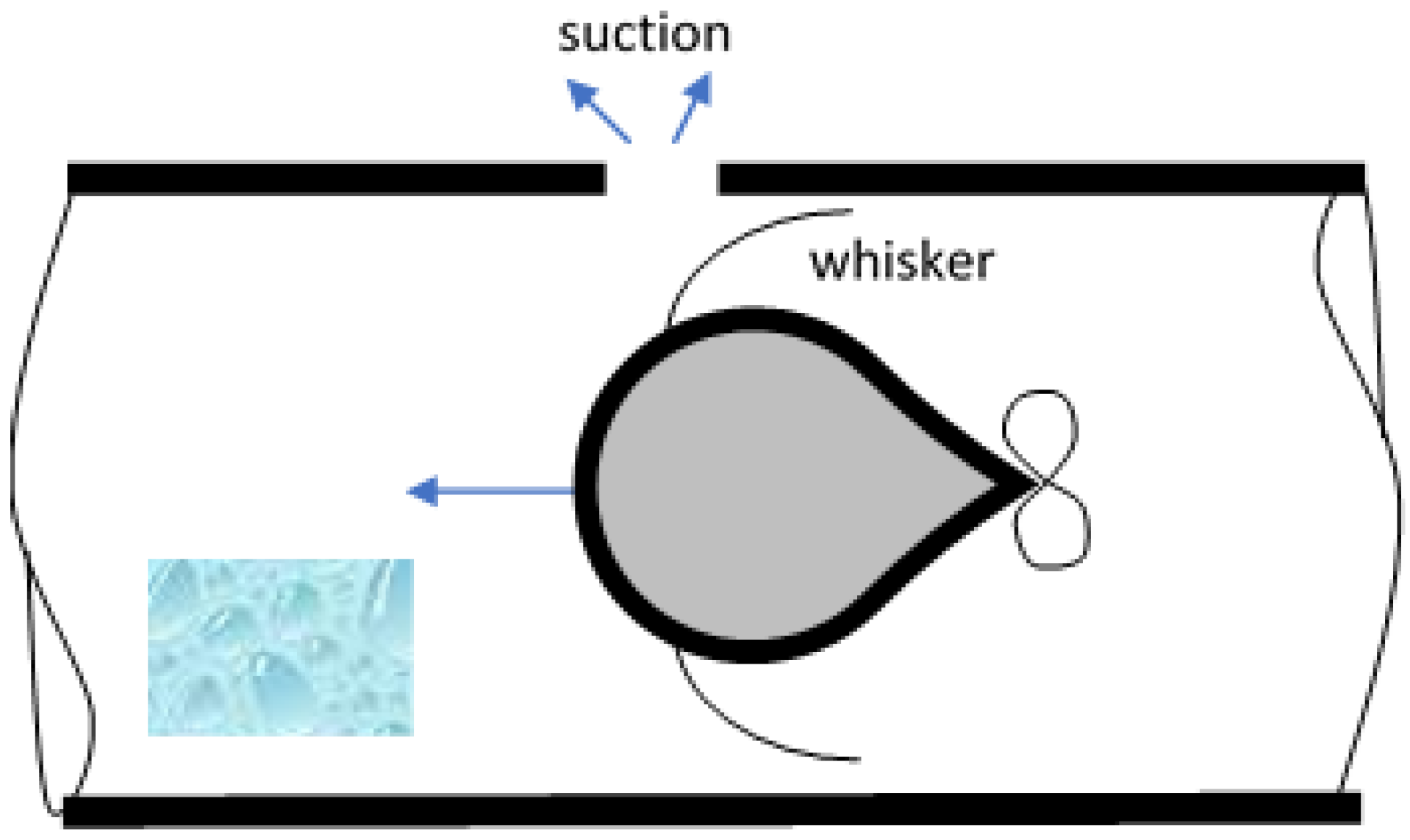
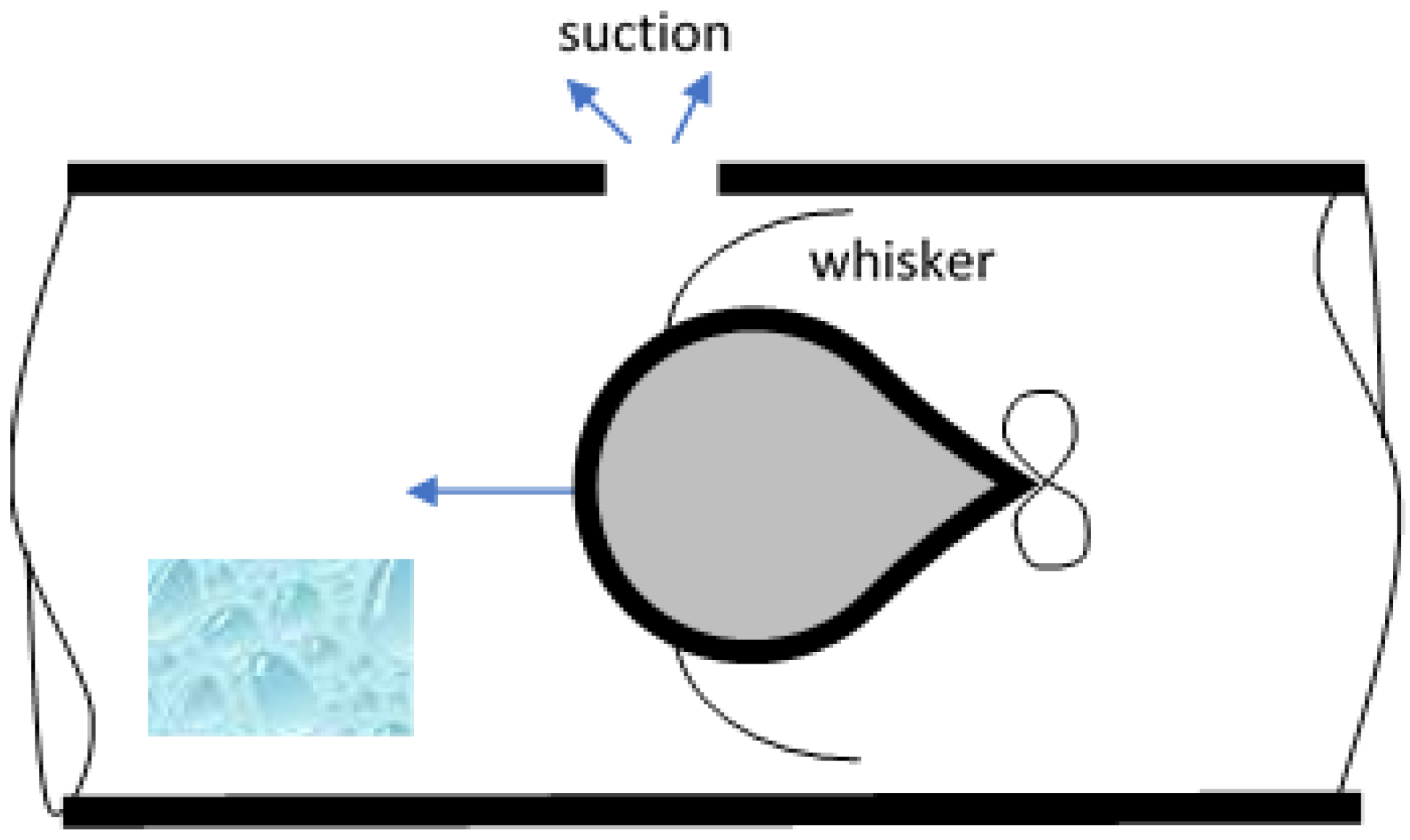
| Leak detection sensor | The authors are proposing a whisker that can be used to detect leakage in pipelines. By passing the whiskers through a piping system, the pressure change at the point of leak is high and hence the whisker can be sucked. These deformations indicate the presence of leak in that system (Figure 11). |
| Energy harvesting (micro-scale) | Synthesized lead-free Na0.5Bi0.5TiO3 (NBT): the resulted whiskers had strip-like nanodomains which indicate the ferroelectric nature and exhibit 0.3% free strain at 9.5 kV/mm. The calculated value of field-induced Smax/Emax reaches 300 pm/V [50,84]. |
7. Research Gaps
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kottapalli, A.G.P.; Asadnia, M.; Hans, H.; Miao, J.M.; Triantafyllou, M.S. Harbor Seal Inspired MEMS Artificial Micro-Whisker Sensor. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; pp. 741–744. [Google Scholar]
- Kim, S.; Kubicek, R.; Paris, A.; Tagliabue, A.; How, J.P.; Bergbreiter, S. A Whisker-Inspired Fin Sensor for Multi-Directional Airflow Sensing. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1330–1337. [Google Scholar]
- Saheb, N.; Mekid, S. Fiber-Embedded Metallic Materials: From Sensing towards Nervous Behavior. Materials 2015, 8, 7938–7961. [Google Scholar] [CrossRef] [PubMed]
- Albarbar, A.; Mekid, S.; Starr, A.; Pietruszkiewicz, R. Suitability of MEMS Accelerometers for Condition Monitoring: An Experimental Study. Sensors 2008, 8, 784–799. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Takei, K.; Yu, Z.; Zheng, M.; Ota, H.; Takahashi, T.; Javey, A. Highly Sensitive Electronic Whiskers Based on Patterned Carbon Nanotube and Silver Nanoparticle Composite Films. Proc. Natl. Acad. Sci. USA 2014, 111, 1703–1707. [Google Scholar] [CrossRef] [Green Version]
- Mekid, S. Micro Machining Issues: Design and Machining Process. Adv. Mater. Res. 2013, 739, 238–244. [Google Scholar] [CrossRef]
- Khalid, A.; Mekid, S.; Hussain, A. Characteristic Analysis of Bioinspired Pod Structure Robotic Configurations. Cogn. Comput. 2014, 6, 89–100. [Google Scholar] [CrossRef]
- Whisker-Based Robots: Center for Robotics and Biosystems—Northwestern University. Available online: https://robotics.northwestern.edu/research/topics/whiskers-based-robots/index.html (accessed on 13 December 2021).
- Sofroniew, N.J.; Svoboda, K. Whisking. Curr. Biol. 2015, 25, R137–R140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, D.; Möller, R. Passive Sensing and Active Sensing of a Biomimetic Whisker. In Proceedings of the International Conference on the Simulation and Synthesis of Living Systems, Bloomington, IN, USA, 3–6 June 2006; Indiana University Press: Bloomington, IN, USA, 2006; pp. 127–131. [Google Scholar]
- Gao, Z.; Dai, L.; Han, S.; Chih-Lin, I.; Wang, Z.; Hanzo, L. Compressive Sensing Techniques for Next-Generation Wireless Communications. IEEE Wirel. Commun. 2018, 25, 144–153. [Google Scholar] [CrossRef] [Green Version]
- Gholizadeh, M.; Melesse, A.; Reddi, L. A Comprehensive Review on Water Quality Parameters Estimation Using Remote Sensing Techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shiklomanov, A.N.; Bradley, B.A.; Dahlin, K.M.; MFox, A.; Gough, C.M.; Hoffman, F.M.; MMiddleton, E.; Serbin, S.P.; Smallman, L.; Smith, W.K. Enhancing Global Change Experiments through Integration of Remote-sensing Techniques. Front. Ecol. Env. 2019, 17, 215–224. [Google Scholar] [CrossRef] [Green Version]
- Casagli, N.; Frodella, W.; Morelli, S.; Tofani, V.; Ciampalini, A.; Intrieri, E.; Raspini, F.; Rossi, G.; Tanteri, L.; Lu, P. Spaceborne, UAV and Ground-Based Remote Sensing Techniques for Landslide Mapping, Monitoring and Early Warning. Geoenviron. Disasters 2017, 4, 9. [Google Scholar] [CrossRef]
- Deshpande, A.; Sarma, S.E.; Youcef-Toumi, K.; Mekid, S. Optimal Coverage of an Infrastructure Network Using Sensors with Distance-Decaying Sensing Quality. Automatica 2013, 49, 3351–3358. [Google Scholar] [CrossRef]
- Baroudi, U.; Qureshi, A.; Mekid, S.; Bouhraoua, A. Radio Frequency Energy Harvesting Characterization: An Experimental Study. In Proceedings of the 2012 IEEE 11th International Conference on Trust, Security and Privacy in Computing and Communications, Liverpool, UK, 25–27 June 2012; IEEE: Liverpool, UK, 2012; pp. 1976–1981. [Google Scholar]
- Mekid, S.; Qureshi, K.; Saleh, A.; Sharawi, M. MEMS Based Soft Nervous Materials with Ambient RF Power Supply: Feasibility Study. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals & Devices (SSD), Marrakech, Morocco, 28–31 March 2017; IEEE: Marrakech, Morocco, 2017; pp. 337–341. [Google Scholar]
- Document Search—Web of Science Core Collection. Available online: https://www.webofscience.com/wos/woscc/basic-search (accessed on 9 August 2021).
- Lee, M.H.; Nicholls, H.R. Review Article Tactile Sensing for Mechatronics—A State of the Art Survey. Mechatronics 1999, 9, 1–31. [Google Scholar] [CrossRef]
- Chi, C.; Sun, X.; Xue, N.; Li, T.; Liu, C. Recent Progress in Technologies for Tactile Sensors. Sensors 2018, 18, 948. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, C.; Huang, N.; Xu, F.; Tong, J.; Chen, Z.; Gui, X.; Fu, Y.; Lao, C. 3D Printing Technologies for Flexible Tactile Sensors toward Wearable Electronics and Electronic Skin. Polymers 2018, 10, 629. [Google Scholar] [CrossRef] [Green Version]
- Kumar, K.; Chen, P.; Ren, H. A Review of Printable Flexible and Stretchable Tactile Sensors. Research 2019, 2019, 3018568. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Khamis, H.; Birznieks, I.; Lepora, N.; Redmond, S. Tactile Sensors for Friction Estimation and Incipient Slip Detection-Toward Dexterous Robotic Manipulation: A Review. IEEE Sens. J. 2018, 18, 9049–9064. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Dai, D.; Gao, Y.; Zhang, Z.; Sun, N.; Tan, H.; Cai, X.; Cai, J. Recent Advances in Graphene Electronic Skin and Its Future Prospects. Chemnanomat 2021, 7, 982–997. [Google Scholar] [CrossRef]
- Miao, P.; Wang, J.; Zhang, C.; Sun, M.; Cheng, S.; Liu, H. Graphene Nanostructure-Based Tactile Sensors for Electronic Skin Applications. Nano-Micro Lett. 2019, 11, 71. [Google Scholar] [CrossRef] [Green Version]
- Niu, H.; Zhang, H.; Yue, W.; Gao, S.; Kan, H.; Zhang, C.; Zhang, C.; Pang, J.; Lou, Z.; Wang, L.; et al. Micro-Nano Processing of Active Layers in Flexible Tactile Sensors via Template Methods: A Review. Small 2021, 17, 2100804. [Google Scholar] [CrossRef]
- Ejeian, F.; Azadi, S.; Razmjou, A.; Orooji, Y.; Kottapalli, A.; Warkiani, M.; Asadnia, M. Design and Applications of MEMS Flow Sensors: A Review. Sens. Actuators A-Phys. 2019, 295, 483–502. [Google Scholar] [CrossRef]
- Yuan, C.; Tony, A.; Yin, R.; Wang, K.; Zhang, W. Tactile and Thermal Sensors Built from Carbon-Polymer Nanocomposites—A Critical Review. Sensors 2021, 21, 1234. [Google Scholar] [CrossRef]
- Wu, Z.; Ai, J.; Ma, Z.; Zhang, X.; Du, Z.; Liu, Z.; Chen, D.; Su, B. Flexible Out-of-Plane Wind Sensors with a Self-Powered Feature Inspired by Fine Hairs of the Spider. ACS Appl. Mater. Interfaces 2019, 11, 44865–44873. [Google Scholar] [CrossRef] [PubMed]
- Na, S.-M.; Rice, M.; Raghunath, G.; Klimchenko, V.; Flatau, A.B. Magnetostrictive Alfenol Whisker Sensor Performance and Sensitivity to Whisker Thickness. IEEE Trans. Magn. 2014, 50, 4007104. [Google Scholar] [CrossRef]
- Kim, S.; Velez, C.; Patel, D.K.; Bergbreiter, S. A Magnetically Transduced Whisker for Angular Displacement and Moment Sensing. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 665–671. [Google Scholar]
- Luo, C.; Pan, C. Research Advances of Bio-Inspired Carbon Nanotubes-Based Sensors. MRS Adv. 2018, 3, 1–11. [Google Scholar] [CrossRef]
- Amoli, V.; Kim, S.; Kim, J.; Choi, H.; Koo, J.; Kim, D. Biomimetics for High-Performance Flexible Tactile Sensors and Advanced Artificial Sensory Systems. J. Mater. Chem. C 2019, 7, 14816–14844. [Google Scholar] [CrossRef]
- Tripathy, A.; Nine, M.J.; Losic, D.; Silva, F.S. Nature Inspired Emerging Sensing Technology: Recent Progress and Perspectives. Mater. Sci. Eng. R Rep. 2021, 146, 100647. [Google Scholar] [CrossRef]
- Parmar, M.; Leon Perez, E.A.A.; Ardila, G.; Saoutieff, E.; Pauliac-Vaujour, E.; Mouis, M. A Demonstration of the Mechanical Sensing Capability of Individually Contacted Vertical Piezoelectric Nanowires Arranged in Matrices. Nano Energy 2019, 56, 859–867. [Google Scholar] [CrossRef]
- Duan, S.; Wu, J.; Xia, J.; Lei, W. Innovation Strategy Selection Facilitates High-Performance Flexible Piezoelectric Sensors. Sensors 2020, 20, 2820. [Google Scholar] [CrossRef]
- Hartmann, M.J.; Johnson, N.J.; Towal, R.B.; Assad, C. Mechanical Characteristics of Rat Vibrissae: Resonant Frequencies and Damping in Isolated Whiskers and in the Awake Behaving Animal. J. Neurosci. 2003, 23, 6510–6519. [Google Scholar] [CrossRef]
- Sarko, D.K.; Rice, F.L.; Reep, R.L. Mammalian Tactile Hair: Divergence from a Limited Distribution. Ann. N. Y. Acad. Sci. 2011, 1225, 90–100. [Google Scholar] [CrossRef]
- Evans, M.H.; Fox, C.W.; Lepora, N.F.; Pearson, M.J.; Sullivan, J.C.; Prescott, T.J. The Effect of Whisker Movement on Radial Distance Estimation: A Case Study in Comparative Robotics. Front. Neurorobot. 2013, 6, 12. [Google Scholar] [CrossRef] [Green Version]
- Prescott, T.; Pearson, M.; Mitchinson, B.; Sullivan, J.C.; Pipe, A. Whisking with Robots. IEEE Robot. Automat. Mag. 2009, 16, 42–50. [Google Scholar] [CrossRef] [Green Version]
- Salisbury, J. Interpretation of Contact Geometries from Force Measurements. In Proceedings of the 1984 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 13–15 March 1984; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; Volume 1, pp. 240–247. [Google Scholar]
- Russell, R.A. Using Tactile Whiskers to Measure Surface Contours. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 1295–1299. [Google Scholar]
- Pipe, T.; Pearson, M.J. Whiskered Robots. Scholarpedia 2015, 10, 6641. [Google Scholar] [CrossRef]
- Russell, R.A.; Wijaya, J.A. Recognising and Manipulating Objects Using Data from a Whisker Sensor Array. Robotica 2005, 23, 653–664. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, N.; He, C. The Superior Mechanical and Physical Properties of Nanocarbon Reinforced Bulk Composites Achieved by Architecture Design—A Review. Prog. Mater. Sci. 2020, 113, 100672. [Google Scholar] [CrossRef]
- Wang, M.; Feng, Z.; Zhai, C.; Zhou, Q.; Wei, T.; Liu, J. Chromium Carbide Micro-Whiskers: Preparation and Strengthening Effects in Extreme Conditions with Experiments and Molecular Dynamics Simulations. J. Solid State Chem. 2020, 291, 121598. [Google Scholar] [CrossRef]
- Zhai, C.; Wang, M.; Feng, Z.; Zhou, Q.; Wei, T.; Liu, J. Chromium Carbide Micro-Whiskers Dataset: Morphologies with Scanning and Transmission Electronic Microscopy. Data Brief 2020, 32, 106222. [Google Scholar] [CrossRef]
- Zhang, P.; Liang, J.; Yin, L.; Guo, S. The Synthesis of Micro-Sized Silicon Carbide Whiskers and the Application for Heat Transfer Enhancement. Sci. China Technol. Sci. 2014, 57, 2371–2378. [Google Scholar] [CrossRef]
- Liu, G.; Song, M.; Liu, X.; Ni, S.; Wang, S.; He, Y.; Liu, Y. An Investigation of the Mechanical Behaviors of Micro-Sized Tungsten Whiskers Using Nanoindentation. Mater. Sci. Eng. A 2014, 594, 278–286. [Google Scholar] [CrossRef]
- Jiang, C.; Zhou, X.; Zhou, K.; Wu, M.; Zhang, D. Synthesis of Na0.5Bi0.5TiO3 Whiskers and Their Nanoscale Piezoelectricity. Ceram. Int. 2017, 43, 11274–11280. [Google Scholar] [CrossRef]
- Liu, Z.; Qi, D.; Leow, W.R.; Yu, J.; Xiloyannnis, M.; Cappello, L.; Liu, Y.; Zhu, B.; Jiang, Y.; Chen, G.; et al. 3D-Structured Stretchable Strain Sensors for Out-of-Plane Force Detection. Adv. Mater. 2018, 30, 1707285. [Google Scholar] [CrossRef] [PubMed]
- Harada, S.; Honda, W.; Arie, T.; Akita, S.; Takei, K. Fully Printed, Highly Sensitive Multifunctional Artificial Electronic Whisker Arrays Integrated with Strain and Temperature Sensors. ACS Nano 2014, 8, 3921–3927. [Google Scholar] [CrossRef]
- Zeb, G.; Young, S.; Hyun, C. Fully 3D Printed Multi-Material Soft Bio-Inspired Whisker Sensor for Underwater-Induced Vortex Detection. Soft Robot. 2018, 5, 122–132. [Google Scholar] [CrossRef]
- Ahmad Ridzuan, N.A.; Miki, N. Tooth-Inspired Tactile Sensor for Detection of Multidirectional Force. Micromachines 2018, 10, 18. [Google Scholar] [CrossRef] [Green Version]
- Wakabayashi, S.; Yamaguchi, T.; Arie, T.; Akita, S.; Takei, K. Out-of-Plane Electric Whiskers Based on Nanocarbon Strain Sensors for Multi-Directional Detection. Carbon 2020, 158, 698–703. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, Y.; Lin, Q. An Integrated MEMS Tactile Tri-Axial Micro-Force Probe Sensor for Minimally Invasive Surgery. In Proceedings of the 2009 IEEE 3rd International Conference on Nano/Molecular Medicine and Engineering, NANOMED 2009, Taiwan, China, 18–21 October 2009; pp. 71–76. [Google Scholar]
- Reeder, J.T.; Kang, T.; Rains, S.; Voit, W. 3D, Reconfigurable, Multimodal Electronic Whiskers via Directed Air Assembly. Adv. Mater. 2018, 30, 1706733. [Google Scholar] [CrossRef]
- Xie, R.; Zhu, J.; Wu, H.; Zhang, K.; Zou, B.; Zhang, X.; Liang, J.; Zheng, B.; Li, S.; Zhang, W.; et al. 3D-Conductive Pathway Written on Leather for Highly Sensitive and Durable Electronic Whisker. J. Mater. Chem. C 2020, 8, 9748–9754. [Google Scholar] [CrossRef]
- Delamare, J.; Sanders, R.; Krijnen, G. 3D Printed Biomimetic Whisker-Based Sensor with Co-Planar Capacitive Sensing. In Proceedings of the IEEE Sensors, Glasgow, UK, 29 October–1 November 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017. [Google Scholar]
- Ju, F.; Ling, S.F. Sensing Fluid Viscosity and Density through Mechanical Impedance Measurement Using a Whisker Transducer. Meas. Sci. Technol. 2013, 24, 055105. [Google Scholar] [CrossRef]
- Ju, F.; Ling, S.F. A Micro Whisker Transducer with Sensorless Mechanical Impedance Detection Capability for Fluid and Tactile Sensing in Space-Limited Applications. Sens. Actuators A Phys. 2015, 234, 104–112. [Google Scholar] [CrossRef]
- Eijking, B.; Sanders, R.; Krijnen, G. Development of Whisker Inspired 3D Multi-Material Printed Flexible Tactile Sensors. In Proceedings of the IEEE Sensors, Glasgow, UK, 29 October–1 November 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; pp. 1–3. [Google Scholar]
- Hua, Q.; Liu, H.; Zhao, J.; Peng, D.; Yang, X.; Gu, L.; Pan, C. Bioinspired Electronic Whisker Arrays by Pencil-Drawn Paper for Adaptive Tactile Sensing. Adv. Electron. Mater. 2016, 2, 1600093. [Google Scholar] [CrossRef]
- Lin, C.W.; Zhao, Z.; Kim, J.; Huang, J. Pencil Drawn Strain Gauges and Chemiresistors on Paper. Sci. Rep. 2014, 4, 3812. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wakabayashi, S.; Yamaguchi, T.; Arie, T.; Akita, S.; Takei, K. Out-of-Plane Flexible Electronic Whisker Array. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Vancouver, BC, Canada, 8–22 January 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 235–238. [Google Scholar]
- Ding, L.; Wang, Y.; Sun, C.; Shu, Q.; Hu, T.; Xuan, S.; Gong, X. Three-Dimensional Structured Dual-Mode Flexible Sensors for Highly Sensitive Tactile Perception and Noncontact Sensing. ACS Appl. Mater. Interfaces 2020, 12, 20955–20964. [Google Scholar] [CrossRef] [PubMed]
- Kottapalli, A.G.P.; Asadnia, M.; Miao, J.M.; Triantafyllou, M.S. Biomimetic Polymer MEMS Haircells with High-Aspect Ratio for High Accuracy Flow Sensing. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; IEEE: Barcelona, Spain, 2013; pp. 976–979. [Google Scholar]
- Mekid, S.; Daraghma, H. Experimental Ultrasonic Sub-Surface Consolidation of Fiber Bragg Grating for Sensorial Materials. J. Mater. Process. Technol. 2018, 252, 673–679. [Google Scholar] [CrossRef]
- Butt, A.M.; Mekid, S. Development Smart/Nervous Material with Novel Sensor Embedding Techniques—A Review. In Proceedings of the ASME 2015 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Colorado Springs, CO, USA, 21–23 September 2015. [Google Scholar] [CrossRef]
- Mekid, S.; Saheb, N.; Daraghma, H.; Butt, A.; Qureshi, K. Upscaling Sensing Materials With Challenges of Sensors Embedding in Powder Based Materials and Polymers. In Proceedings of the ASME 2015 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Colorado Springs, CO, USA, 21–23 September 2015; Volume 1: Development and Characterization of Multifunctional Materials; Mechanics and Behavior of Active Materials; Modeling, Simulation and Control of Adaptive Systems. American Society of Mechanical Engineers: Colorado Springs, CO, USA, 2015; p. V001T01A003. [Google Scholar]
- Mekid, S.; Butt, A.M.; Qureshi, K. Characterization of Fiber Optics Integrity Under Several Embedding Parameters in Smart Materials. In Proceedings of the ASME 2015 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Colorado Springs, CO, USA, 21–23 September 2015; Volume 2: Integrated System Design and Implementation; Structural Health Monitoring; Bioinspired Smart Materials and Systems; Energy Harvesting. American Society of Mechanical Engineers: Colorado Springs, CO, USA, 2015; p. V002T05A004. [Google Scholar]
- Liu, G.; Song, M.; Liu, X.; He, Y. Factors Affecting the Growth of Micro/Nano-Sized Tungsten Whiskers Synthesised by Vapour Deposition. Philos. Mag. 2013, 93, 584–597. [Google Scholar] [CrossRef]
- Baik, E.-S.; Baik, Y.-J.; Lee, S.W.; Jeon, D. Fabrication of Diamond Nano-Whiskers. Thin Solid Film. 2000, 377–378, 295–298. [Google Scholar] [CrossRef]
- Tian, S.; Liu, Y.; Ma, Q.; Zhang, P.; Zhou, J.; Xue, F.; Sun, Z. Intermetallics-Induced Directional Growth of Sn Whiskers in Sn-3.5Ag Coating on Al Substrate. Appl. Surf. Sci. 2021, 539, 148135. [Google Scholar] [CrossRef]
- Kim, J.M.; Muramatsu, H. Two-Photon Photopolymerized Tips for Adhesion-Free Scanning-Probe Microscopy. Nano Lett. 2005, 5, 309–314. [Google Scholar] [CrossRef]
- Lakshmi, B.B.; Dorhout, P.K.; Martin, C.R. Sol−Gel Template Synthesis of Semiconductor Nanostructures. Chem. Mater. 1997, 9, 857–862. [Google Scholar] [CrossRef]
- Wettels, N.; Santos, V.J.; Johansson, R.S.; Loeb, G.E. Biomimetic Tactile Sensor Array. Adv. Robot. 2008, 22, 829–849. [Google Scholar] [CrossRef] [Green Version]
- Huet, L.A.; Rudnicki, J.W.; Hartmann, M.J.Z. Tactile Sensing with Whiskers of Various Shapes: Determining the Three-Dimensional Location of Object Contact Based on Mechanical Signals at the Whisker Base. Soft Robot. 2017, 4, 88–102. [Google Scholar] [CrossRef] [PubMed]
- Xiao, C.; Xu, S.; Wu, W.; Wachs, J. Active Multi-Object Exploration and Recognition via Tactile Whiskers. arXiv 2021, arXiv:2109.03976. [Google Scholar]
- Sullivan, J.; Mitchinson, B.; Pearson, M.; Evans, M.; Lepora, N.; Fox, C.; Melhuish, C.; Prescott, T. Tactile Discrimination Using Active Whisker Sensors. IEEE Sens. J. 2012, 12, 350–362. [Google Scholar] [CrossRef]
- Bebek, O.; Cavusoglu, M.C. Whisker Sensor Design for Three Dimensional Position Measurement in Robotic Assisted Beating Heart Surgery. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2017; IEEE: Rome, Italy, 2007; pp. 225–231. [Google Scholar]
- Sensitive Whiskers Could Make Small Drones Safer. Available online: https://spectrum.ieee.org/sensitive-whiskers-for-tiny-drones (accessed on 14 December 2021).
- Valdivia y Alvarado, P.; Subramaniam, V.; Triantafyllou, M. Design of a Bio-Inspired Whisker Sensor for Underwater Applications. In Proceedings of the 2012 IEEE Sensors, Taiwan, China, 28–31 October 2012; IEEE: Taiwan, China, 2012; pp. 1–4. [Google Scholar]
- Mekid, S.; Lim, B. Characteristics Comparison of Piezoelectric Actuators at Low Electric Field: Analysis of Strain and Blocking Force. Smart Mater. Struct. 2004, 13, N93. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sayegh, M.-A.; Daraghma, H.; Mekid, S.; Bashmal, S. Review of Recent Bio-Inspired Design and Manufacturing of Whisker Tactile Sensors. Sensors 2022, 22, 2705. https://doi.org/10.3390/s22072705
Sayegh M-A, Daraghma H, Mekid S, Bashmal S. Review of Recent Bio-Inspired Design and Manufacturing of Whisker Tactile Sensors. Sensors. 2022; 22(7):2705. https://doi.org/10.3390/s22072705
Chicago/Turabian StyleSayegh, Mohamad-Ammar, Hammam Daraghma, Samir Mekid, and Salem Bashmal. 2022. "Review of Recent Bio-Inspired Design and Manufacturing of Whisker Tactile Sensors" Sensors 22, no. 7: 2705. https://doi.org/10.3390/s22072705
APA StyleSayegh, M.-A., Daraghma, H., Mekid, S., & Bashmal, S. (2022). Review of Recent Bio-Inspired Design and Manufacturing of Whisker Tactile Sensors. Sensors, 22(7), 2705. https://doi.org/10.3390/s22072705