
Damper Winding for Noise and Vibration Reduction of a Permanent Magnet Synchronous Machine


Abstract
:1. Introduction
2. Origins of Noise and Vibrations
2.1. Flux Density Harmonics
2.2. Maxwell Forces and Noise
3. Investigation of Damper System
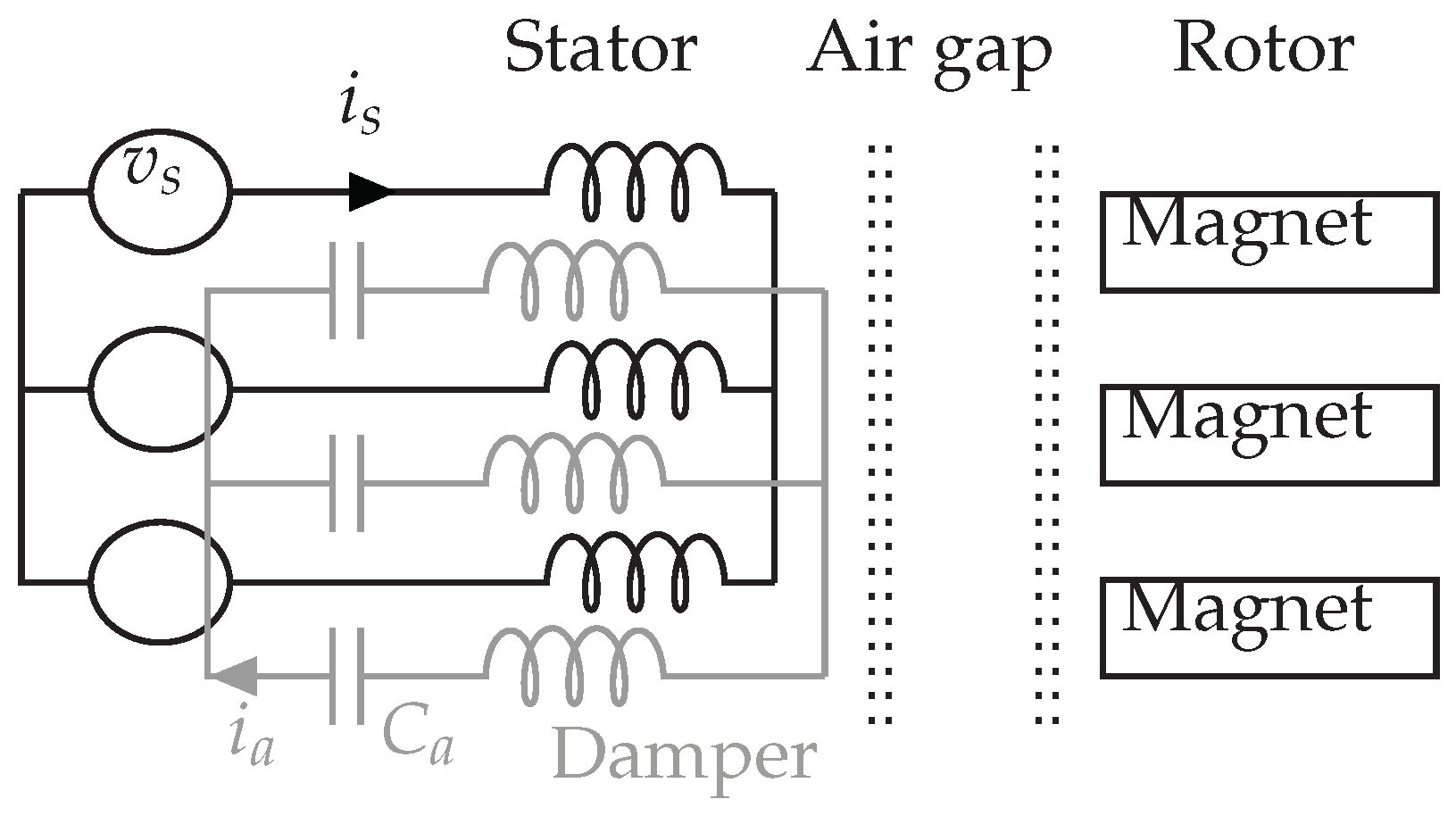
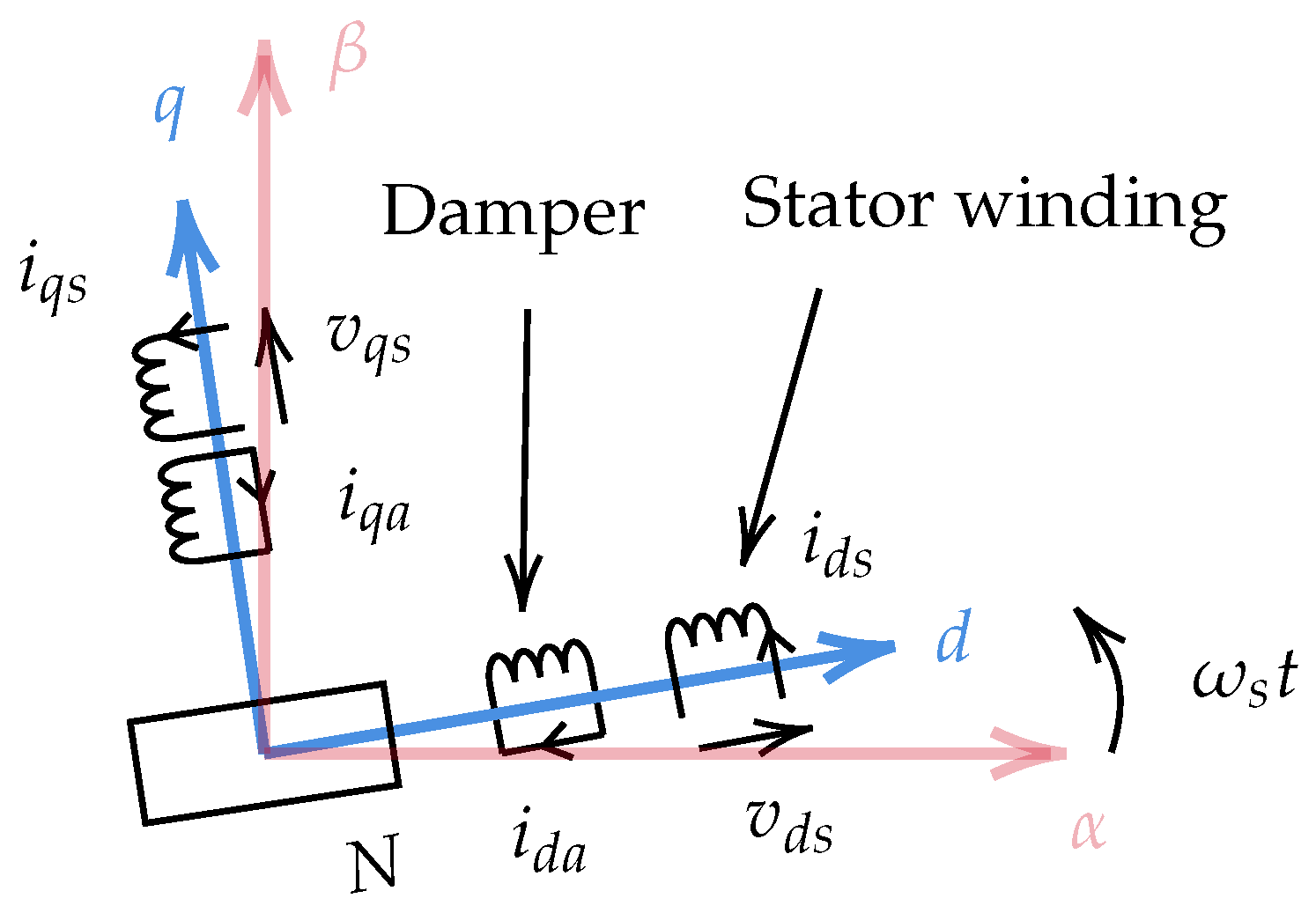
3.1. Three-Phase Damper System
3.2. Principle of Harmonic Reduction
3.3. Equivalent Electrical Circuits
3.4. Scientific Approach
4. Analytical Study of Damper System
4.1. Estimation of Inductance Values
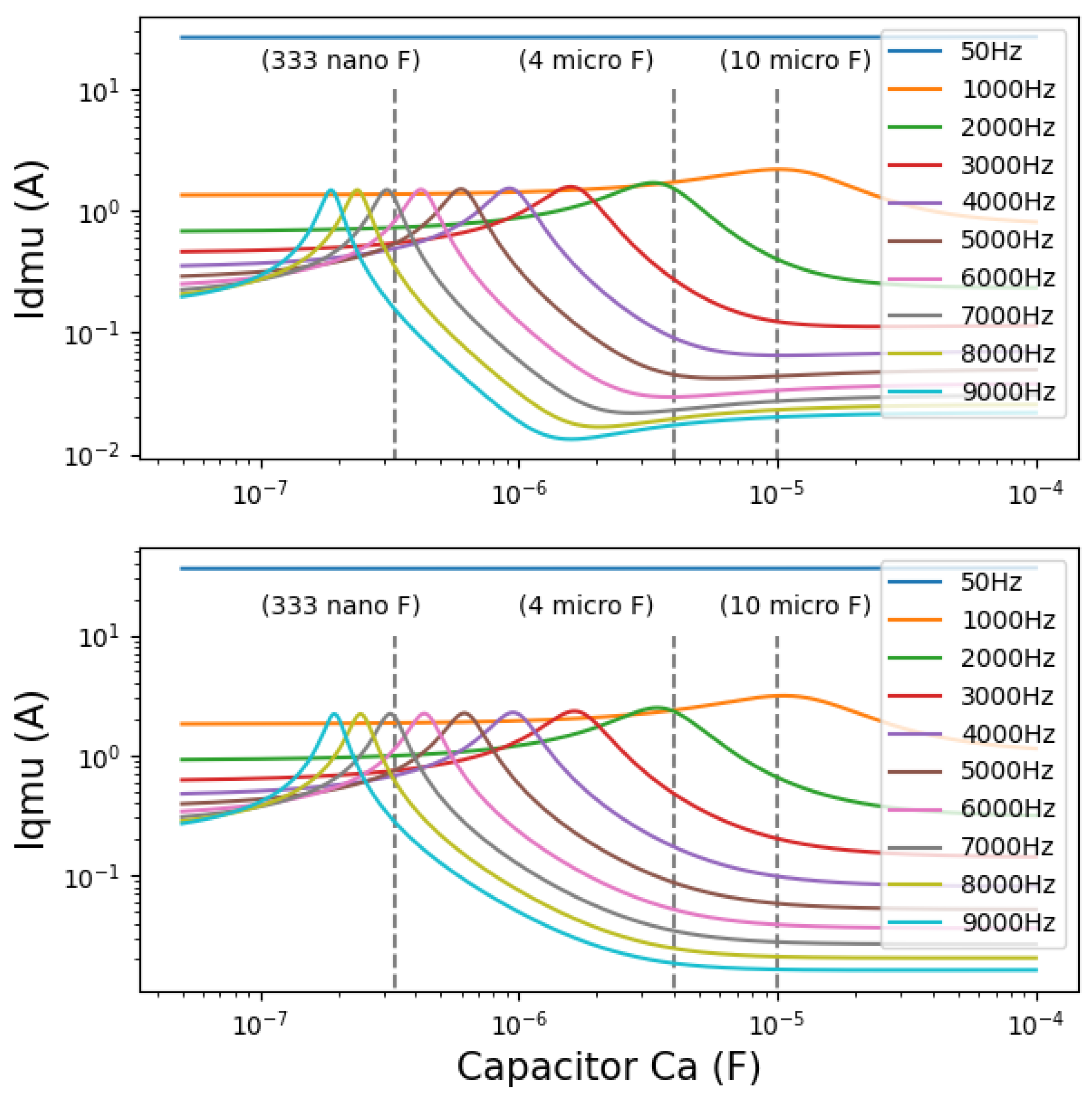
4.2. Analysis of Magnetizing Current Harmonics
- : The resonances of the magnetizing current harmonics around occur at . There are slight increases in the magnetizing currents near .
- : Most of the magnetizing current harmonics are differently mitigated. But the resonant peak of the current harmonic at appears.
- : The damping effect for the majority of current harmonics is further intensified, and the curves gradually stabilize. The curve of the current harmonic at hits the resonant peak.
5. Finite Element Method Simulations
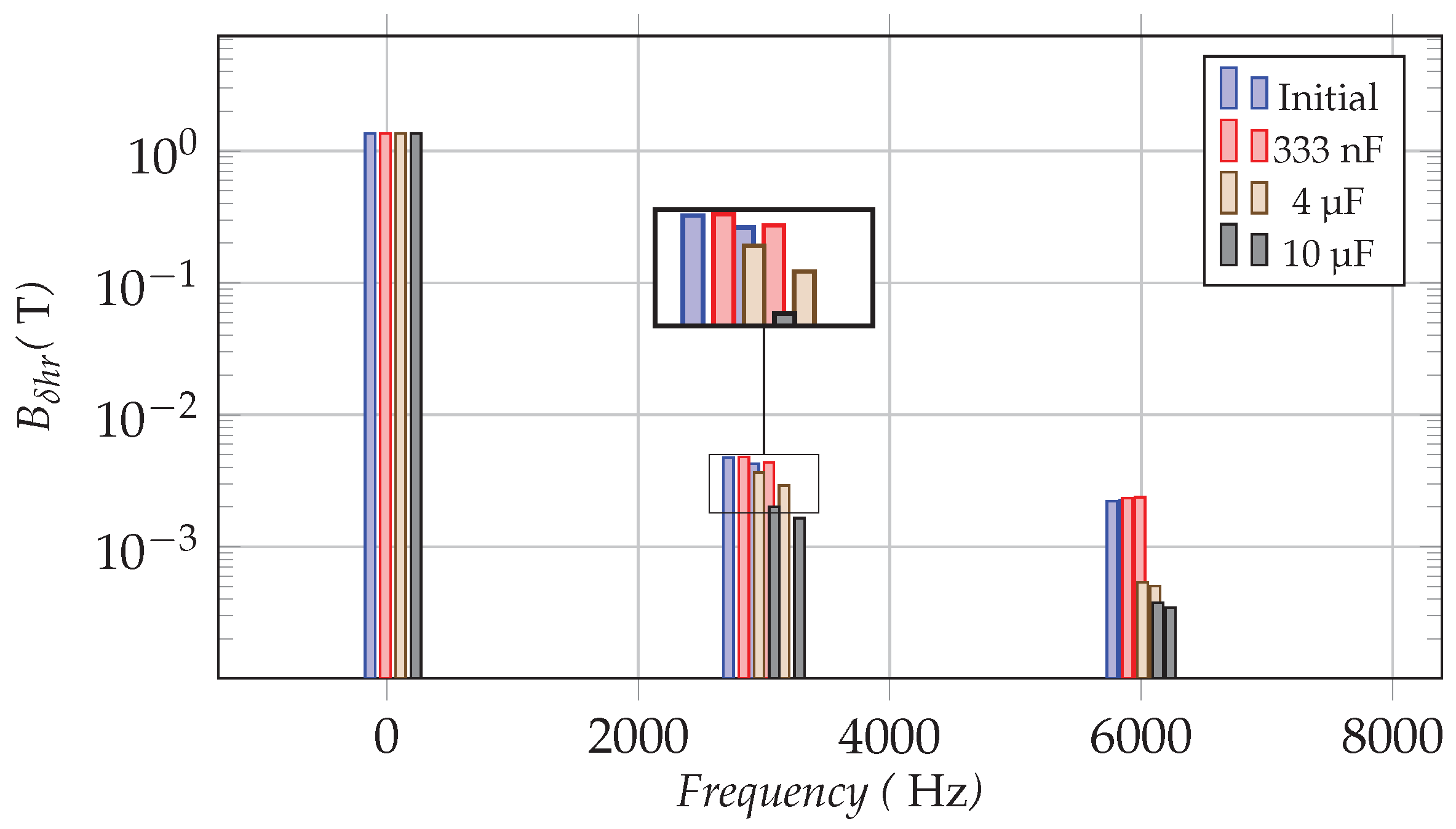
- : There are a few flux density harmonics that are slightly amplified. But the fundamental flux density component is stable. As with the previous analytical curves, is closer to the resonant peak of the flux density harmonics around , so the auxiliary winding amplifies these harmonics more obviously than it does around . Compared to the fundamental component, these variations are relatively small.
- : The damper makes a significant harmonic reduction while having little effect on the fundamental component. The harmonic reduction effect is almost identical to the theoretical prediction.
- : For the harmonics around and , the damper with capacitors achieves an even better damping effect than the damper which uses capacitors. This can be explained with the magnetizing current curves (Figure 7). The reason for this is that this capacitance value is further distant from the area where electrical resonances of these harmonics are likely to occur.
6. Experimental Results
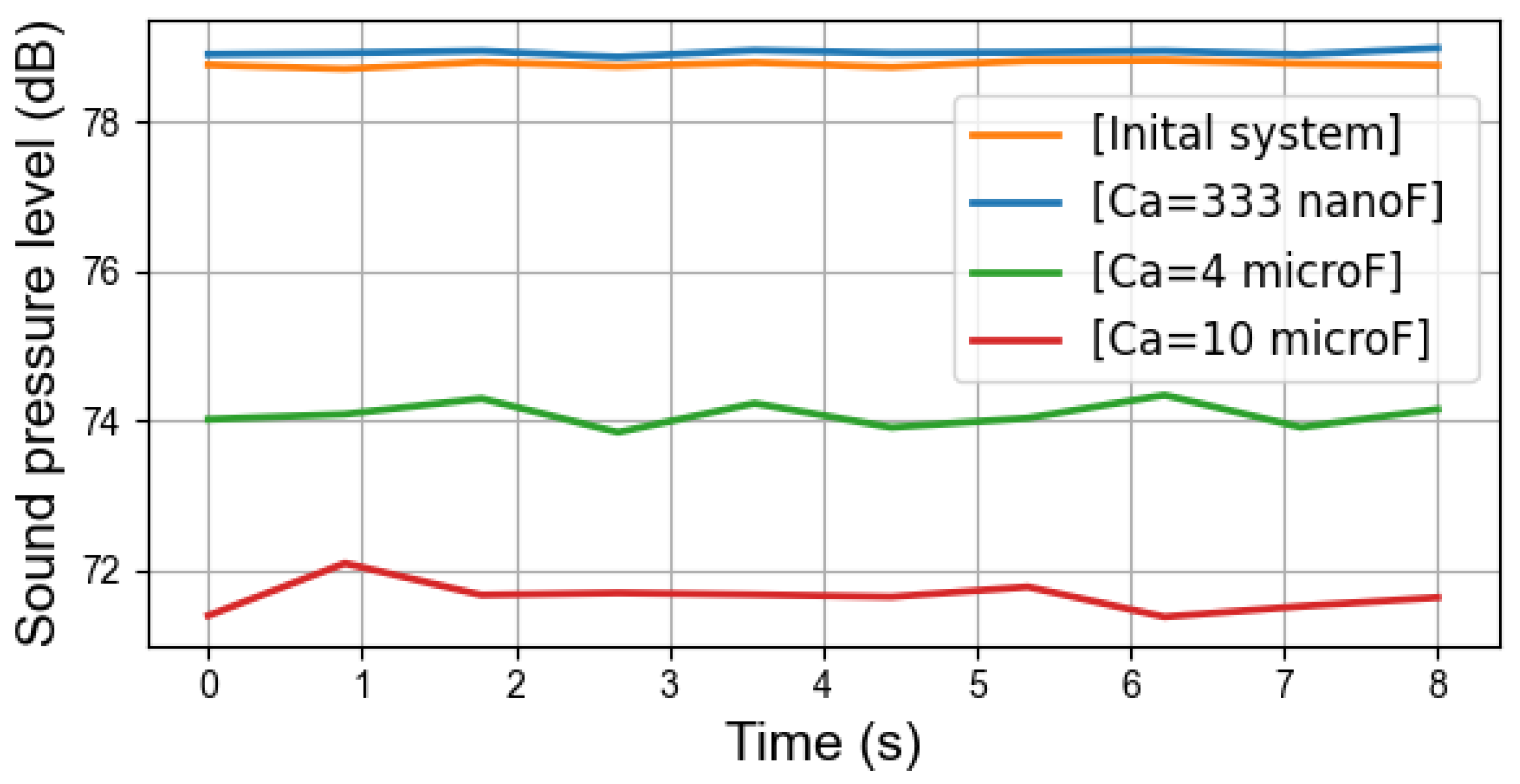
6.1. Global Sound Pressure Level Measurement
6.2. Acoustic Noise Spectra
- Case 1: In the initial system without damper, the noises around and are more important than other noise components, which indicates the electromagnetic harmonics contribute significantly to the machine noise under this operating condition.
- Case 2: The damper winding is connected to the capacitors with . The noises around are increased by . For these noises, a positive correlation is found between the electrical resonances of magnetizing currents in Section 4.2 and the noise-amplification phenomena in the experiments. Around , the impact of the damper is inconspicuous. In the experiments, there is a slight decrease in noise in this range, whereas theoretical studies show a slight rise in these noise components. However, considering the error of the noise measurement and theoretical computation, the difference is tolerable and reasonable. For the noises with frequencies above , this damper still has a good noise-reduction effect.
- Case 3: For , the significant noise reduction can be observed in the noise spectra and in the global sound pressure level in Figure 9. In particular, the PWM noises are effectively mitigated. It can be seen that the noises around are amplified, compared to other cases, which is also consistent with the previous curves in Figure 7, because in this case, the electrical resonances of current magnetizing occur. Fortunately, this variation contributes slightly to the global noise level.
- Case 4: With , the damper works better, because there are fewer noise-amplification phenomena. In the low-frequency band, the small increase of noises does not affect the global noise level, but the high-frequency noises are obviously reduced. Similar results can be seen in the magnetizing current curves (Figure 7).
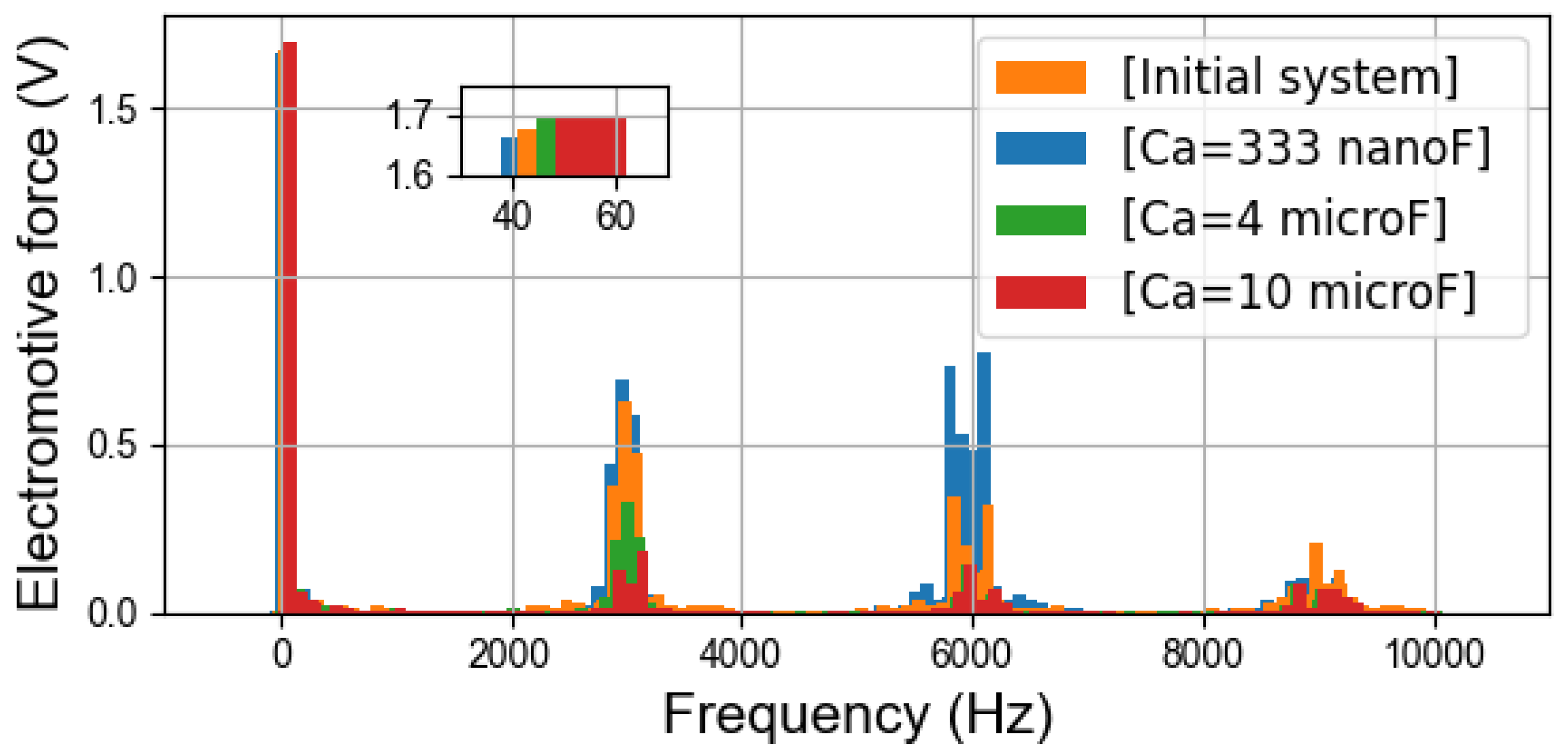
6.3. Electromotive Force Spectra
7. Discussion
- Additional mass and volume: The damper wound in stator slots increases slightly the system weight. The superimposed auxiliary winding takes up slot space, thus lowering the fill factor of the main winding. The added mass and volume are difficult to avoid, but it is possible to minimize their impact by optimizing the damper winding configuration, according to operating conditions.
- Amplification of current harmonics: In the theoretical study and experiments, the amplification of current harmonics occurs in the stator winding. The problem can be explained by the equivalent electrical circuits in Figure 5 and Figure 7. The damper reduces the current harmonics in the magnetizing inductance and thus the noise of the machine. Most of the current harmonics pass the damper side. This is in line with the objectives of this study. But for the electromagnetic harmonics, the whole system has a lower total impedance, because of the addition of the damper branch. Thus stator current harmonics () in the principal winding are inevitably increased. On the one hand, the harmonic currents may enter the electrical grid and on the other hand, the energy efficiency ratio of the machine is reduced. Considerably more work will need to be done to determine the variation of stator current harmonics under different operating conditions.
- Increase of power consumption: In the experiments, the machine with the damper consumes more electrical energy. The extra power may depend on the damper configuration and PWM parameters. It is probably related to the amplification of the stator current harmonics. The additional power consumption can be investigated later to see if it varies with the increase of mechanical load.
- Limitations of damper system: At present, this paper only verifies the PWM noise reduction by damper system, but further research is needed to study its impact on other electromagnetic noises. For example, the back-electromotive force harmonics are closer to the fundamental frequency, compared to the high-frequency harmonics from PWM, so it is difficult for the damper system to effectively reduce the noise from these harmonics without affecting the fundamental components.
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vijayraghavan, P.; Krishnan, R. Noise in electric machines: A review. IEEE Trans. Ind. Appl. 1999, 35, 1007–1013. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Ying, H.; Huang, S.; Zhang, Q. Study of suppression of vibration and noise of PMSM for electric vehicles. IET Electr. Power Appl. 2020, 14, 1274–1282. [Google Scholar] [CrossRef]
- Deng, W.; Zuo, S. Electromagnetic Vibration and Noise of the Permanent-Magnet Synchronous Motors for Electric Vehicles: An Overview. IEEE Trans. Transp. Electrif. 2019, 5, 59–70. [Google Scholar] [CrossRef]
- Xu, X.; Han, Q.; Chu, F. Review of Electromagnetic Vibration in Electrical Machines. Energies 2018, 11, 1779. [Google Scholar] [CrossRef] [Green Version]
- Cassoret, B.; Lecointe, J.P.; Brudny, J.F. Noise and Vibrations of Electrical Rotating Machines. In Power Electronics and Motor Drives; CRC Press: Boca Raton, FL, USA, 2018; Chapter 9; pp. 1–24. [Google Scholar]
- Yang, S.J.; Timar, P.L. The Effect of Harmonic Currents on the Noise of a Three-Phase Induction Motor. IEEE Trans. Power Appar. Syst. 1980, PAS-99, 307–310. [Google Scholar] [CrossRef]
- Ibrahim, I.; Mohammadi, M.H.; Ghorbanian, V.; Lowther, D.A. Effect of Pulsewidth Modulation on Electromagnetic Noise of Interior Permanent Magnet Synchronous Motor Drives. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Emery, N.; Wang, Y.; Al-Ani, D.; Bilgin, B. Acoustic Noise and Vibration of an Interior Permanent Magnet Traction Motor: PWM Effect. In Proceedings of the 2021 IEEE Transportation Electrification Conference Expo (ITEC), Chicago, IL, USA, 21–25 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Hara, T.; Ajima, T.; Tanabe, Y.; Watanabe, M.; Hoshino, K.; Oyama, K. Analysis of Vibration and Noise in Permanent Magnet Synchronous Motors With Distributed Winding for the PWM Method. IEEE Trans. Ind. Appl. 2018, 54, 6042–6049. [Google Scholar] [CrossRef]
- Sun, T.; Kim, J.M.; Lee, G.H.; Hong, J.P.; Choi, M.R. Effect of Pole and Slot Combination on Noise and Vibration in Permanent Magnet Synchronous Motor. IEEE Trans. Magn. 2011, 47, 1038–1041. [Google Scholar] [CrossRef]
- Verez, G.; Barakat, G.; Amara, Y.; Hoblos, G. Impact of Pole and Slot Combination on Vibrations and Noise of Electromagnetic Origins in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Le Besnerais, J.; Souron, Q. Design of quiet permanent magnet synchronous electrical motors by optimum skew angle. In Proceedings of the 23rd International Congress on Sound and Vibration, Athens, Greece, 10–14 July 2016. [Google Scholar]
- Le Besnerais, J.; Lanfranchi, V.; Hecquet, M.; Romary, R.; Brochet, P. Optimal Slot Opening Width for Magnetic Noise Reduction in Induction Motors. IEEE Trans. Energy Convers. 2009, 24, 869–874. [Google Scholar] [CrossRef]
- Yang, I.J.; Lee, S.H.; Lee, K.B.; Lee, J.; Kim, W.H.; Jang, I.S. A Process to Reduce the Electromagnetic Vibration by Reducing the Spatial Harmonics of Air Gap Magnetic Flux Density. IEEE Trans. Magn. 2021, 57, 1–6. [Google Scholar] [CrossRef]
- Huang, Y.; Xu, Y.; Zhang, W.; Zou, J. Hybrid RPWM Technique Based on Modified SVPWM to Reduce the PWM Acoustic Noise. IEEE Trans. Power Electron. 2019, 34, 5667–5674. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, W.; Huang, Y.; Zou, J. Reduction method of high-frequency audible PWM noise for three-phase permanent magnet synchronous motors. Energy Rep. 2020, 6, 1123–1129. [Google Scholar] [CrossRef]
- Miyama, Y.; Ishizuka, M.; Kometani, H.; Akatsu, K. Vibration reduction by applying carrier phase-shift PWM on dual three-phase windings permanent-magnet synchronous motor. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 5998–6004. [Google Scholar] [CrossRef]
- Zhang, M.; Bahri, I.; Mininger, X.; Vlad, C. A new vibration reduction control strategy of switched reluctance machine. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Gulez, K.; Adam, A.A.; Buzcu, I.; Pastaci, H. Using passive filters to minimize torque pulsations and noises in surface PMSM derived field oriented control. Simul. Model. Pract. Theory 2007, 15, 989–1001. [Google Scholar] [CrossRef]
- Xu, W.; Kaizheng, H.; Bin, X. A New Inverter Output Passive Filter Topology for PWM Motor Drives. In Proceedings of the 2007 8th International Conference on Electronic Measurement and Instruments, Xi’an, China, 16–18 August 2007; pp. 3-625–3-629. [Google Scholar] [CrossRef]
- Hatua, K.; Jain, A.K.; Banerjee, D.; Ranganathan, V.T. Active Damping of Output LC Filter Resonance for Vector-Controlled VSI-Fed AC Motor Drives. IEEE Trans. Ind. Electron. 2012, 59, 334–342. [Google Scholar] [CrossRef]
- Mininger, X.; Lefeuvre, E.; Gabsi, M.; Richard, C.; Guyomar, D. Semiactive and Active Piezoelectric Vibration Controls for Switched Reluctance Machine. IEEE Trans. Energy Convers. 2008, 23, 78–85. [Google Scholar] [CrossRef]
- Cassoret, B.; Corton, R.; Roger, D.; Brudny, J.F. Magnetic noise reduction of induction machines. IEEE Trans. Power Electron. 2003, 18, 570–579. [Google Scholar] [CrossRef]
- Belkhayat, D.; Roger, D.; Brudny, J. Active reduction of magnetic noise in asynchronous machine controlled by stator current harmonics. In Proceedings of the 1997 Eighth International Conference on Electrical Machines and Drives (Conf. Publ. No. 444), Cambridge, UK, 1–3 September 1997; pp. 400–405. [Google Scholar] [CrossRef]
- Lecointe, J.P.; Romary, R.; Brudny, J.; McClelland, M. Analysis and active reduction of vibration and acoustic noise in the switched reluctance motor. Electr. Power Appl. IEE Proc. 2004, 151, 725–733. [Google Scholar] [CrossRef]
- Adam, A.A.; Gulez, K. Reduction of torque pulsation and noises in PMSM with hybrid filter topology. Simul. Model. Pract. Theory 2011, 19, 350–361. [Google Scholar] [CrossRef]
- Gulez, K.; Adam, A.A.; Pastaci, H. Torque Ripple and EMI Noise Minimization in PMSM Using Active Filter Topology and Field-Oriented Control. IEEE Trans. Ind. Electron. 2008, 55, 251–257. [Google Scholar] [CrossRef]
- Bauw, G.; Cassoret, B.; Romary, R.; Ninet, O. Damper winding for noise and vibration reduction of induction machine under sinusoidal conditions. Int. J. Appl. Electromagn. Mech. 2018, 57, 13–21. [Google Scholar] [CrossRef]
- Muljadi, E.; Lipo, T.; Novotny, D. Power factor enhancement of induction machines by means of solid-state excitation. IEEE Trans. Power Electron. 1989, 4, 409–418. [Google Scholar] [CrossRef]
- Wallin, M.; Bladh, J.; Lundin, U. Damper Winding Influence on Unbalanced Magnetic Pull in Salient Pole Generators with Rotor Eccentricity. IEEE Trans. Magn. 2013, 49, 5158–5165. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Shek, J.K.H.; Mueller, M.A.; Hsieh, M.F. Damper Windings in Induction Machines for Reduction of Unbalanced Magnetic Pull and Bearing Wear. IEEE Trans. Ind. Appl. 2013, 49, 2206–2216. [Google Scholar] [CrossRef]
- Dupont, J.B.; Lanfranchi, V. Noise radiated by a permanent magnet synchronous motor: Simulation methodology and influence of motor defects. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 1321–1327. [Google Scholar] [CrossRef]
- Liang, W.; Wang, J.; Luk, P.C.K.; Fang, W.; Fei, W. Analytical Modeling of Current Harmonic Components in PMSM Drive With Voltage-Source Inverter by SVPWM Technique. IEEE Trans. Energy Convers. 2014, 29, 673–680. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.J.; Kim, H.J.; Hong, J.P.; Park, C.J. Estimation of Acoustic Noise and Vibration in an Induction Machine Considering Rotor Eccentricity. IEEE Trans. Magn. 2014, 50, 857–860. [Google Scholar] [CrossRef]
- de Freitas, M.; de Andrade, D.; de Paula, H.; Domingos, J. Effects of magnetic saturation on induction machines driven by static converters. In Proceedings of the IEEE International Electric Machines and Drives Conference, IEMDC’03, Madison, WI, USA, 1–4 June 2003; Volume 2, pp. 1026–1031. [Google Scholar] [CrossRef] [Green Version]
- Pop-Piglesan, F.; Jurca, F.; Oprea, C.; Martis, C. Permanent magnet synchronous machine design for low-noise drive systems. In Proceedings of the ISMA 2014—International Conference on Noise and Vibration Engineering and USD 2014—International Conference on Uncertainty in Structural Dynamics, Leuven, Belgium, 15–17 September 2014; pp. 1387–1399. [Google Scholar]
- Devillers, E. Electromagnetic Subdomain Modeling Technique for the fast Prediction of Radial and Circumferential Stress Harmonics in Electrical Machines. Ph.D. Thesis, Ecole Centrale de Lille, Villeneuve-d’Ascq, France, 2018. [Google Scholar]
- Balavoine, F.; Bauw, G.; Cassoret, B.; Romary, R. Comparison of two passive solutions for noise reduction of PWM-fed induction machines. In Proceedings of the 2019 19th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), Nancy, France, 29–31 August 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Chen, X.; Hu, J.; Chen, K.; Peng, Z. Modeling of electromagnetic torque considering saturation and magnetic field harmonics in permanent magnet synchronous motor for HEV. Simul. Model. Pract. Theory 2016, 66, 212–225. [Google Scholar] [CrossRef]
- Pile, R.; Le Besnerais, J.; Parent, G.; Devillers, E.; Henneron, T.; le menach, Y.; Lecointe, J.P. Analytical study of air-gap surface force—Application to electrical machines. Open Phys. 2020, 18, 658–673. [Google Scholar] [CrossRef]
- De Paula, G.T.; de, A. Monteiro, J.R.B.; de Alvarenga, B.P.; de Almeida, T.E.P.; Pereira, W.C.A.; de Santana, M.P. On-Load Back EMF of PMSM Using Maxwell Stress Tensor. IEEE Trans. Magn. 2018, 54, 1–15. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Umans, S.; Fitzgerald, A.; Kingsley, C. Electric Machinery, 7th ed.; McGraw-Hill Higher Education: New York, NY, USA, 2013. [Google Scholar]
- Jerkan, D.G.; Gecić, M.A.; Marčetić, D.P. IPMSM Inductances Calculation Using FEA. In Proceedings of the International Symposium on Industrial Electronics INDEL 2014, Banja Luka, Bosnia and Herzegovina, 7–8 November 2014; pp. 134–138. [Google Scholar]
- Hendershot, J.; Miller, T. Design of Brushless Permanent-magnet Machines; Motor Design Books: Venice, FL, USA, 2010. [Google Scholar]
- Sharifian, M.B.; Herizchi, T.; Firouzjah, K.G. Field oriented control of permanent magnet synchronous motor using predictive space vector modulation. In Proceedings of the 2009 IEEE Symposium on Industrial Electronics Applications, Kuala Lumpur, Malaysia, 4–6 October 2009; Volume 2, pp. 574–579. [Google Scholar] [CrossRef]
- Zhang, Z.; Shu, J. Matlab-based permanent magnet synchronous motor vector control simulation. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; Volume 9, pp. 539–542. [Google Scholar] [CrossRef]
- Haq, H.U.; Imran, M.; Okumuş, H.; Habibullah, M. Speed Control of Induction Motor using FOC Method. Int. J. Eng. Res. Appl. 2015, 5, 154–158. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimated with FEA | ||
| 1.52 | ||
| 1.71 | ||
| + | 27.89 | |
| + | 20.16 | |
| 0.21 | ||
| 0.021 | ||
| Estimated analytically | ||
| 1.16 | ||
| 7.24 |
| Initial | ||||
|---|---|---|---|---|
| 50 | 1.3537 | 1.3537 | 1.3549 | 1.3567 |
| 2900 | 0.004735 | 0.004809 | 0.003641 | 0.002013 |
| 3100 | 0.004260 | 0.004345 | 0.002909 | 0.001647 |
| 5950 | 0.002213 | 0.002338 | 0.0005357 | 0.0003779 |
| 6050 | 0.002256 | 0.002376 | 0.0005028 | 0.0003462 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, S.; Bauw, G.; Romary, R.; Cassoret, B.; Le Besnerais, J. Damper Winding for Noise and Vibration Reduction of a Permanent Magnet Synchronous Machine. Sensors 2022, 22, 2738. https://doi.org/10.3390/s22072738
Ni S, Bauw G, Romary R, Cassoret B, Le Besnerais J. Damper Winding for Noise and Vibration Reduction of a Permanent Magnet Synchronous Machine. Sensors. 2022; 22(7):2738. https://doi.org/10.3390/s22072738
Chicago/Turabian StyleNi, Sijie, Grégory Bauw, Raphaël Romary, Bertrand Cassoret, and Jean Le Besnerais. 2022. "Damper Winding for Noise and Vibration Reduction of a Permanent Magnet Synchronous Machine" Sensors 22, no. 7: 2738. https://doi.org/10.3390/s22072738