1. Introduction
In many areas of daily life, we encounter location-based services (LBS), such as for navigation [
1], delivery tracking [
2], or contact tracing [
3]. A localization system determines the location of an entity and therefore enables LBS. Indoor localization and indoor localization systems (ILS) are referred to when localization is performed indoors. Mautz [
4] presents several applications of indoor localization, such as the tracking of patients and equipment in hospitals, locating firefighters in a burning building, or optimizing material flow in warehouses.
Although ILS are attributed an enormous potential, their application in practice is rare. In contrast to outdoor applications, which are mostly based on the Global Positioning System (GPS), no technology has prevailed so far. Potortì et al. [
5] point out the lack of standardized concepts, procedures, and metrics in test and evaluation of indoor localization systems as a reason for low market transparency, and consequently low trust of stakeholders, and a slow adoption rate. Likewise, Pasricha [
6] share this view and name the definition of application-domain-specific requirements as one of the key open research challenges in the field of indoor localization. Lymberopoulos et al. [
7] point out that to promote the adoption of ILS, it is essential for test and evaluation (T&E) to be meaningful.
What does it mean for test and evaluation to be meaningful, and what is the reason that localization systems are rarely subjected to meaningful test and evaluation? Meaningfulness in test and evaluation is characterized by the significance of the results to the stakeholders involved. To be meaningful to system developers, the test and evaluation results must be reproducible and comparable to other systems and experiments. From the perspective of an end-user or system integrator, test and evaluation serves to determine a system’s suitability for a particular task. The main reason that ILS are rarely subject to meaningful test and evaluation is that test and evaluation of indoor localization systems is an extremely challenging task [
8]. Mautz [
4] terms the issue of finding the optimal localization system for an application as a multi-dimensional problem.
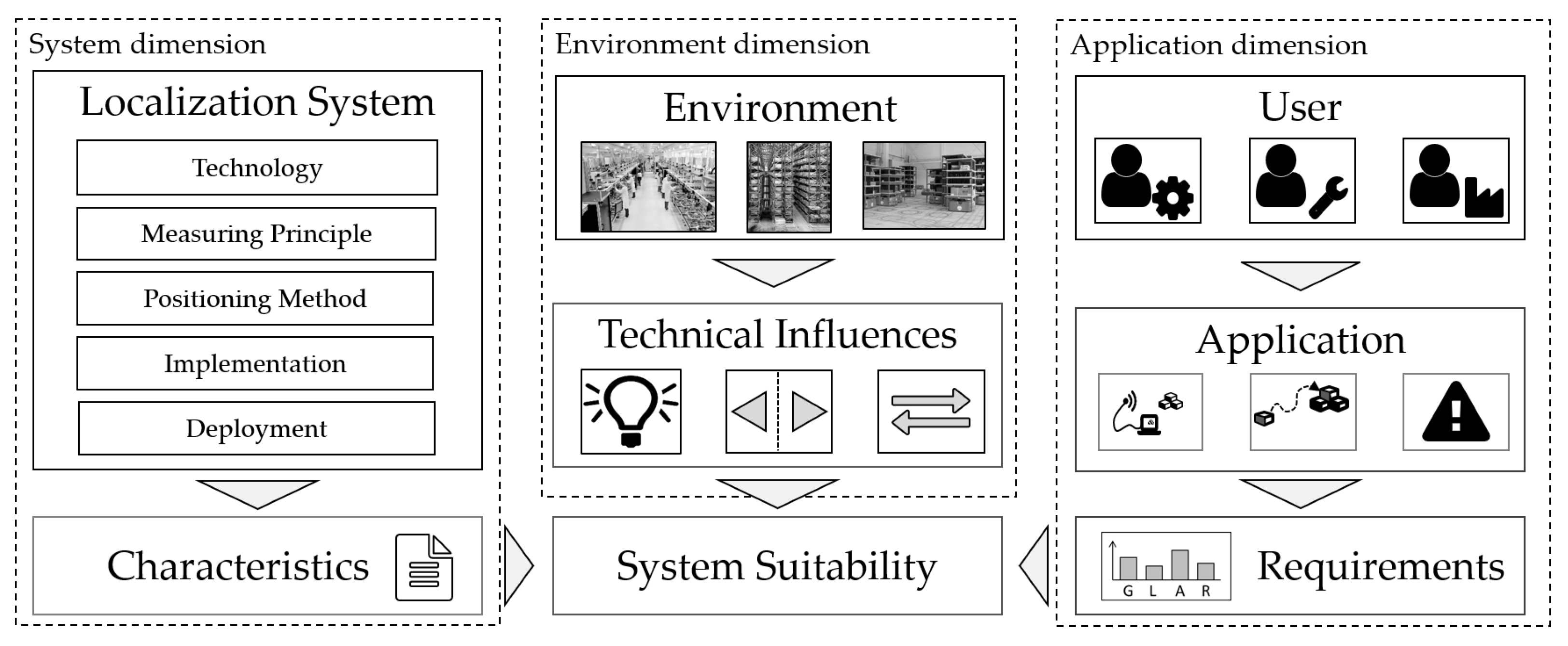
Figure 1 illustrates this problem, with the dimensions explained as follows.
System dimension (
Figure 1, left): The characteristics of a localization system depend on a variety of factors, such as the underlying technology (e.g., Bluetooth, vision), the measuring principle (e.g., time-of-flight, received signal strength), the positioning method (e.g., fingerprinting, pedestrian dead reckoning, multilateration), the implementation (hard- and software), and the system deployment (e.g., position and amount of anchor nodes), while data fusion techniques are commonly applied on different levels [
9]. Deployment is of particular importance for infrastructure-based systems.
Environment dimension (
Figure 1, middle): The system’s performance is affected by technical influences, such as occlusion, reflection, or radio interference which in turn are a consequence of the environment [
10]. The environment for the application of ILS can vary widely, ranging from underground mines to multi-story office buildings or warehouses. The impact of the influencing factors on system performance depends on the system characteristics. Since the technology of indoor localization systems is heterogeneous, the dependencies on influencing factors likewise vary.
Application dimension (
Figure 1, right): To find a suitable system, the system performance must meet the requirements of the user. The type and level of requirements vary depending on the application and user. Sixteen potential user requirements, such as accuracy, latency, and integrity, are described by Mautz [
4].
To achieve meaningful test and evaluation results, the dimensions described must be taken into account. Significant spatial, financial, and organizational resources, as well as extensive metrology, statistical, data processing, and application domain expertise, are required for meaningful testing and evaluation [
11]. Pasricha [
6] point out that as a consequence, in practice, mostly simple proof-of-concept tests are performed.
Methodologies are essential to support systematic test and evaluation and thus increase the meaningfulness of results. Methodologies for building-wide test and evaluation, such as the EvAAL Framework [
12] and the EVARILOS Benchmarking Handbook [
13], have been proposed. The ISO/IEC 18305 International Standard [
14] was presented in 2016 to define a standardized procedure for test and evaluation of indoor localization systems with a focus on the end-user. Yet, publicly documented use of the named methodologies for test and evaluation is mostly limited to associated indoor localization competitions [
7,
15,
16,
17]. We published a work-in-progress paper on the topic of application-driven test and evaluation of indoor localization systems for warehouses for the Conference on Indoor Positioning and Indoor Navigation (IPIN) in 2021 [
18]. This work expands the previously presented findings substantially by generalizing the methodology and by further elaborating all elements of the paper and the framework’s components.
The main reason for the low adoption of methodologies are the high cost of building-wide testing, especially for infrastructure-based ILS. For many localization systems and application environments, building-wide testing is required. Nonetheless, there are others, where the presence of rooms or other fixed structures is of minor importance or can be physically modeled. For such cases, tests are oftentimes performed in test halls that can be modified, for example, by the placement of certain objects [
19,
20,
21,
22,
23]. In contrast to building-wide testing, this is considered a semi-controlled test environment, whereby semi-controlled means that some influences can be controlled, while others cannot. Since the environment can be controlled to achieve good performance results, the need for a methodology to achieve meaningful results is even more evident. However, a methodology for T&E of ILS in semi-controlled environments does not yet exist.
In this work, the process of application-driven test and evaluation of ILS, the involved stakeholders, and their requirements are first analyzed in
Section 2. Furthermore, test and evaluation in practice and existing methodologies are discussed. In
Section 3, the
T&E 4iLoc Framework is presented. The aim of the proposed methodology is to increase meaningfulness for T&E in semi-controlled environments. It consists of several modules for specifying requirements, defining application-dependent scenarios, and for system-level, black-box T&E of indoor localization systems. The empirical validation of the
T&E 4iLoc Framework is described in
Section 4, whereby a camera-based, a light detection and ranging (LiDAR)-based, and a ultra wideband (UWB) ILS are examined, considering the application “Automated Guided Vehicles in Warehouse Operation”. Finally, the proposed methodology is discussed and conclusions are drawn in
Section 5.
3. Test and Evaluation with the T&E 4iLoc Framework
In the following, the
T&E 4iLoc Framework is presented. Unlike existing methodologies for black-box system level, the
T&E 4iLoc Framework is not designed for building-wide testing. Especially for RF-based systems, the building type, and structures are of great importance to the system performance. However, building-wide testing has the disadvantages of low reproducibility, comparability, and feasibility. In practice, test and evaluation of localization systems is often performed in test halls [
19,
20,
21,
22,
23]. In this work, the term semi-controlled test environment is introduced as a category for test environments for T&E of indoor localization systems. Semi-controlled test environments are indoor facilities, such as test halls, large rooms, or large open spaces in a building, which provide an open test area with a modifiable environment. There are usually various constraints on the control of the environment, such as the facility itself, the available objects, or the deployment of system infrastructure. It is assumed that in semi-controlled test environments, T&E can be performed with some degree of similarity in terms of factors influencing the system performance. A major challenge for T&E in such environments is to produce results that are meaningful to both system developers and users. The following guidelines were established to incorporate the results from the previous analysis of test and evaluation (
Section 2) into the
T&E 4iLoc Framework.
Application focus: Test and evaluation that is meaningful to a system user can only be performed with respect to an application. The heterogeneity of indoor localization applications must be considered.
Technology openness: A system user is not interested in the inner mechanisms of a localization system as long as it works according to the system requirements. Consequently, an application-driven methodology must be open to different localization system technologies.
Stakeholder focus: System developers and testers require different information from a localization system than system users. A methodology should consider the needs of all stakeholders involved, while a stakeholder should only receive relevant information.
Modular design: To find broad acceptance and thus increase comparability, a methodology must be practicable for system users and developers from academic research and industry. Modularity supports feasibility for different stakeholders and use cases while ensuring comparability through clearly defined processes and interfaces.
First, considerations of the
T&E 4iLoc Framework are stated with respect to the previously discussed characteristics of test and evaluation. Then, the framework architecture and components are explained. An overview of the terminology can be found in
Appendix B.
3.1. Characteristics
The characteristics of the
T&E 4iLoc Framework are discussed to provide a comprehensible overview and enable the comparison to the previously presented methodologies in
Table 1.
3.1.1. System-Testing vs. Component-Testing and Knowledge about the System’s Inner Workings
The performance of the components of a localization system or the system’s inner workings are not relevant from a system user’s point of view as long as the system meets the requirements. Hence, a system-level and black-box approach is used. The output of the localization system is in the form of absolute position and/or heading data with timestamp.
3.1.2. Application-Driven T&E Approach
The
T&E 4iLoc Framework is based on a hybrid approach according to Seltzer et al. [
39] with the goal of determining the suitability of a localization system for an application. Consequently, it influences both testing and evaluation.
3.1.3. Test Environment and Building Specifications
As previously mentioned, the T&E 4iLoc Framework is designed for T&E in semi-controlled environments. It is required that a rectangular test area is provided in an open space. A test area of at least 50 m is suggested to enable the guidance of the ELT, object placement, and evaluation of location-dependent errors. This number is based on practical experience for T&E at the Institute for Technical Logistics. Depending on the localization system to be tested and the application under consideration, this value can also be fallen below.
3.1.4. Provision of Scenarios
The provision of predefined test scenarios increases reproducibility and comparability. However, the transfer to a different practical application is limited. Hence, functions are provided to allow flexible but systematic definition of application-dependent test scenarios. In addition, a reference scenario is provided.
3.1.5. ELT and Motion Specification
ELT and its motion can be specified flexibly depending on the application. The entity classes “person”, “object”, and “robot” are adopted as reference classes from the ISO/IEC 18305 [
14]. In addition, “vehicles”, such as manually guided industrial trucks, are considered an entity class.
3.1.6. Ground Truth Specification
The
T&E 4iLoc Framework requires a reference localization system. For off-line surveyed points, no timestamp is provided automatically for ground truth data, which is of particular importance for dynamic measurements. In addition, a reference system provides continuous localization data, which is relevant for system developers and testers to analyze system behavior and to prove test validity. As specified in the ISO/IEC 18305 [
14], the ground truth accuracy should be at least one order of magnitude higher than that of the localization system.
3.1.7. Specification of Path and Test Points
The heading of a localization system can have a significant influence on the localization accuracy. Hence, poses (
) are considered instead of points (
). A path is defined by evaluation poses, which are traversed by the ELT one after the other. The suggested number of evaluation poses is one per square meter. This number is not fixed and should be adjusted to reach statistically significant results for the localization system, test environment, and the test and evaluation procedure. Guidelines for the selection of evaluation points are provided by de Poorter et al. [
44]. The poses can be selected based on various criteria, such as random grid-based sampling or by defining an application-dependent path.
3.1.8. Proposed Metrics and Metrics Applied for Absolute Position Error
The localization accuracy is considered the most important performance characteristic of a localization system. Unlike the EVARILOS Benchmarking Handbook [
13] and the ISO/IEC 18305 [
14], the
T&E 4iLoc Framework focuses only on localization accuracy. Metrics other than localization accuracy are not precluded. However, for these, reference is made to the considerations provided in the EVARILOS Benchmarking Handbook [
13] and ISO/IEC 18305 [
14]. The
T&E 4iLoc Framework considers horizontal position (
x and
y), vertical position (
z), and heading (
), resulting in four degrees-of-freedom (4-DoF). A comprehensive list of the accuracy metrics considered can be found in
Section 3.8.
3.1.9. Consideration of Influences
Influences are taken into account by defining scenarios. Analysis of influences on system performance is enabled by comparing performance metrics from different scenarios, e.g., by calculating sensitivity values, as suggested in the EVARILOS Benchmarking Handbook [
11], or by multifactor analysis [
45]. In this work, the analysis of influences is not addressed in depth.
3.2. Architecture
The
T&E 4iLoc Framework is designed in a modular way, consisting of seven function modules ((a)–(g)). Each module consists of several functions that result in output data that are further processed by subsequent modules. The framework architecture is shown in
Figure 3.
The modules are grouped into two procedures. The T&E 4iLoc Modeling Procedure contains the Application Definition, Scenario Definition, and the Requirement Specification. The T&E 4iLoc Benchmarking Procedure contains the Experiment Specification, Experiment Execution, Performance Evaluation, and System Evaluation. The division into the two procedures enables the distinction between application-dependent T&E by using both, and application-independent T&E, by using only the T&E 4iLoc Benchmarking Procedure.
Application-dependent T&E is enabled by the T&E 4iLoc Modeling Procedure. First, the application is defined by describing the Processes and the Environment as part of the Application Definition. Application-dependent evaluation is achieved by defining system Requirements, as a result of the Requirement Specification. On the other hand, testing is influenced by defining a Scenario as part of the Scenario Definition. The T&E 4iLoc Modeling Procedure leads to a testbed-independent abstraction of an application for the test and evaluation.
The T&E 4iLoc Benchmarking Procedure can be based on a Scenario and Requirements for application-dependent T&E, or on freely defined scenarios for application-independent T&E. The testbed-independent scenario is transferred to a testbed-dependent Experiment Spec. Then, the experiment is performed based on the functions of the Experiment Execution, resulting in a set of Experiment Data consisting of continuous, timestamped localization and reference data. The calculation of performance metrics and the data visualization is performed in the Performance Evaluation. The Performance Evaluation is focused on developers and testers and provides a holistic view of the system behavior. Finally, the System Evaluation matches Requirements and Performance Results by providing and comparing the performance metrics relevant to an application.
In the following, the briefly introduced modules ((a)–(g)). of the T&E 4iLoc Framework are explained in more detail by defining their functions (1)–(3) and output data.
3.3. Application Definition (a)
It is critical whether test and evaluation is performed for tracking customers in a supermarket, firefighters in a burning building, or for navigating an autonomous forklift. The goal of the
Application Definition is to describe exactly what the application or application domain under consideration (AUC) looks like, whereby an application domain contains multiple applications. The functions of the
Application Definition are shown in
Figure 4.
First, the aim of the AUC is described (1). Then, the application is broken down, by defining the respective Processes (2) and the Environment (3). Depending on the aim of the test and evaluation procedure, it may be reasonable to further divide Processes and Environments.
To illustrate the functions of the module and their relevance, the example of customer tracking in a supermarket is considered. The aim of the AUC could be to gain transparency of customer behavior by tracking their movements during the shopping process. Exemplary Processes are “searching for products”, “picking products”, or “comparing prices”. The Environment is defined by describing relevant dynamics and objects in a supermarket. If relevant, the supermarket environment could be further divided, e.g., into shopping and checkout areas.
3.4. Requirement Specification (b)
To determine the suitability of a system for an AUC, specific performance requirements must be derived. As discussed in
Section 3.1, the
T&E 4iLoc Framework focuses on performance requirements related to localization accuracy. Hence, the absolute accuracy of the following parameters is considered:
Horizontal position ();
Vertical position (z);
Spherical position ();
Heading ().
Three functions are defined to specify the requirements (
Figure 5a. First, localization functions must be derived (1). Second, relevant requirement parameters are selected (2) by checking whether the accuracy of a parameter is relevant for realizing the localization function. Requirements can be marked as “must” or “shall”. Then, their magnitudes are defined with the respective confidence level (3). The magnitudes depend on the exact localization functions. Thus, generic rules can hardly be defined. In general, the dimensions of the ELT and the size of the region of interest are relevant. The confidence
p is described by multiple of the standard deviation for a normal distributed measure. To ensure reliable processes, the Six Sigma (6
) methodology has become established as a quality management tool in the industry [
46]. The goal of Six Sigma is to improve the quality of processes to such an extent that only 0.00034% of processes are defective. For the
T&E 4iLoc Framework, the description by sigma values is adopted to define the following confidence levels for localization data:
Very low (2): ;
Low (3): ;
Moderate (4): ;
High (5): ;
Very high (6): .
It is important to note that the confidence level for each individual position estimate of a system is not equal to the confidence in a localization function, since incorrect location estimates can be compensated at a higher level of the application. While the requirements for tracking people or objects to gain transparency about processes are rather loose, the requirements for controlling robots or vehicles are rather strict.
Considering the example of customer tracking in a supermarket, a localization function could be to determine the horizontal position of customers in the supermarket over time. The relevant requirement parameter is consequently the person’s horizontal position, which should not exceed the shelf width from which the magnitude of the accuracy requirement can be derived.
An application or process can usually be implemented in different ways. It is therefore not possible to prove whether a set of requirements is correct or not until the AUC has been implemented. However, by defining the processes and localization functions, the determination of the performance requirements is comprehensible. Requirements can be combined to define the requirements of a process with several localization functions, an application with several processes, or an application domain consisting of multiple applications.
3.5. Scenario Definition (c)
A Scenario in the T&E 4iLoc Framework is an abstraction of an AUC. The aim of a Scenario is to enable application-dependent testing with the T&E 4iLoc Benchmarking Procedure. It contains a description of the application-dependent influences on the performance of localization systems.
The
Scenario Definition is based on three functions, shown in
Figure 5b. First, systems that are considered to be tested (system under test—SUT) are listed (1). Then, the application-driven influencing factors are listed (2) and specified (3) by matching environmental and process influences with the AUC to define an application-dependent scenario. In contrast to technical influencing factors, such as occlusion or reflection, application-driven influencing factors are derived from the applications’ processes and environment and have a practical character.
A static multi-camera system, as presented by Sun et al. [
47], and an UWB localization system are considered for the application of tracking customers in a supermarket. Application-driven influencing factors on the system’s localization accuracy, related to the process, could be the type of entity to be localized, the type of motion of the entity, and the type of path it follows. In terms of the environment, static objects, dynamic objects, and lighting conditions may be considered application-dependent influences on the system’s performance. Finally, to define an application-dependent scenario, the application-driven influencing factors are specified with respect to the AUC. For the given example, the ELT class to be selected is “person”, while the motion type is described by walking at moderate speed.
Table 2 gives an example overview of an application-driven scenario for tracking customers in a supermarket.
Scenarios enable an application-dependent specification of experiments and can be reused in test and evaluation procedures in different facilities. By specifying experiments based on systematically defined Scenarios, reproducibility and comparability are supported, while application-driven influencing factors are considered to increase the transferability of the results.
A reference scenario is provided to establish a standard case for test and evaluation procedures. The reference scenario aims for minimal application-driven influences on generic localization systems. The reference scenario is provided in
Table 3. There are neither static nor dynamic objects to be placed. As for the the process influences, the reference scenario requires a robot, which is slowly following a path. The path is defined by randomly distributed evaluation poses. The ELT class “robot” is chosen because the automatic execution leads to an optimal path accuracy and thus increases repeatability of an experiment. The ELT has to be static inside the tolerance area of the evaluation pose. The reference scenario can be extended depending on the influencing factors on the system performance of an SUT.
The T&E 4iLoc Modeling is completed by carrying out the Application Definition, Requirement Specification, and Scenario Definition. Application-dependent Scenarios and Requirements can be used for application-dependent test and evaluation with the T&E 4iLoc Benchmarking Procedure. The T&E 4iLoc Benchmarking Procedure is elaborated in the following.
3.6. Experiment Specification (d)
A
Scenario is transferred into a
Experiment Spec by the
Experiment Specification. Unlike a
Scenario, a
Experiment Spec is dependent on the testbed. The functions of the
Experiment Specification are shown in
Figure 6a.
First, the testbed is specified (1) by defining the dimensions of the facility, the rectangular test area, available ELT, the environmental control parameters, and the reference system. The provision of photos and layouts of the test facility are suggested. Next, the configuration of the SUT needs to be defined (2) by describing the position of hardware components and the configuration of software parameters. To achieve a realistic setup, it is essential to define the system configuration according to the instructions from the system developer, taking into account the AUC. Finally, the benchmarking process and the environment configuration are defined (3) considering the Scenario and testbed specification. The environment is defined by describing the implementation of the environment influencing factors, such as the type and position of static objects. The benchmarking process is defined accordingly, e.g., by specifying the selected ELT, its motion, and path through the calculation of evaluation poses. Tolerance values must be defined as the minimal closeness for reaching an evaluation pose.
It is suggested to sample the evaluation poses on a grid with the grid size
g, which defines the distance between the gridlines. The horizontal position tolerance
b should be less than half of the grid size to avoid overlapping of tolerance areas. The heading of the evaluation poses should be chosen between a fixed set of options, such as multiples of 90°. This allows for systematic analysis of the location-dependent localization accuracy. For random grid-based sampling, the evaluation poses are randomly selected from the grid points and the options for the heading.
Figure 7 illustrates the exemplary result of random grid-based sampling of the evaluation poses on a rectangular test area for six evaluation poses. Depending on the path type defined in the
Scenario, different sampling methods can be applied. An overview of various sampling methods is provided in the EVARILOS Benchmarking Handbook [
13].
The specified testbed, system configuration, environment configuration, and the benchmarking process fully specify an experiment. An experiment can be repeated in the same facility by following the information of an Experiment Spec.
3.7. Experiment Execution (e)
The
Experiment Execution serves to create
Experiment Data based on the
Experiment Spec. The
Experiment Execution consists of three functions, as shown in
Figure 6b. First, the experiment is set up (1) according to the
Experiment Spec as follows:
Setting up the test environment according to the environment specification;
Deploying and configuring the localization systems according to the system specification;
Calibrating the reference system;
Synchronizing the clocks of the reference system and localization system;
Setting up the ELT to allow its localization with the reference and localization system.
Next, the alignment between the global origins of the coordinate systems of the localization system
and the reference system
must be determined (2). This is achieved by recording localization and reference data at a number of uniformly distributed points on the test area. It is proposed to compute the transformation matrix
by applying the Umeyama alignment [
48] without scaling. If the mean pose errors would be eliminated as a bias of the
Experiment Data, systematic location-dependent errors would be neglected. The alignment is illustrated in
Figure 8.
Finally, the
Experiment Data are recorded from the localization and reference data, while the ELT is passing the evaluation poses in sequence (3). When several localization systems are tested for the same
Scenario, it is recommended to record the location estimates from multiple systems simultaneously for improving comparability, as suggested by Lymberopoulos et al. [
7]. In case of manual guidance, it is recommended to monitor the ELT’s current pose and provide the coordinates of the following evaluation pose. In case of using a robot, it is recommended that the robot obtains the data for navigation from the reference system.
The output data of the Experiment Execution consist of the transformation matrix and a list of continuous location estimates and reference data with a synchronized timestamp. The transformation is applied to the localization data in the Performance Evaluation.
3.8. Performance Evaluation (f)
The
Performance Evaluation aims to produce comparable results based on the
Experiment Data and to analyze system behavior. The
Performance Results consist of performance metrics and data for visualization. The functions of the
Performance Evaluation are presented in
Figure 9a.
First, the
Evaluation Data are determined (1). While the
Experiment Data consist of the continuous data as measured in the experiment, the
Evaluation Data are based on the aligned location estimate at the evaluation poses. The alignment of the continuous localization data is achieved by applying the transformation
. Then, the reference data are linearly interpolated to match the timestamp of the localization data. Finally, the data points corresponding to the position of the reference system closest to the defined evaluation pose are selected.
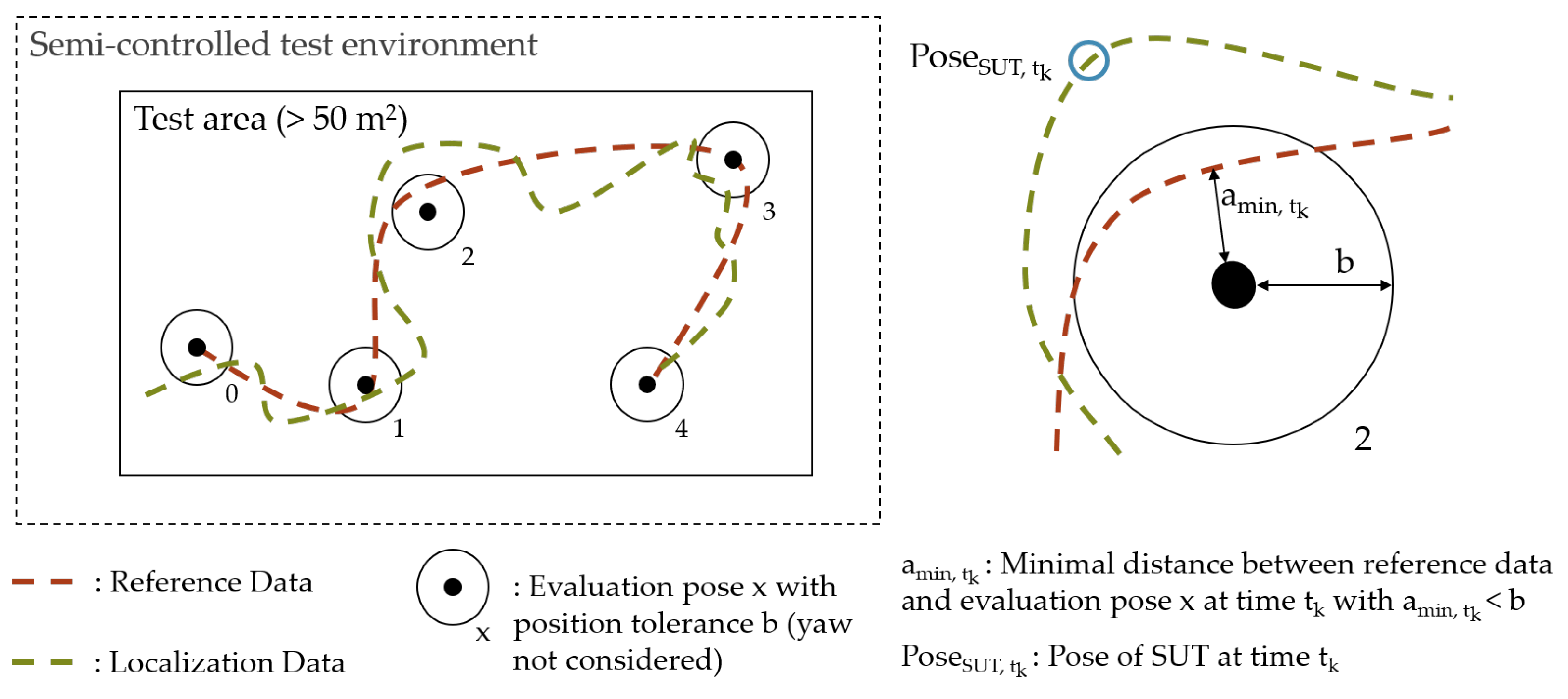
Figure 10 shows the aligned and interpolated localization and reference data for an exemplary experiment. The left side shows a top view of the test area within the semi-controlled environment. Also shown are the evaluation poses (0–4) with their tolerance
b and the reference and localization data, each defining a trajectory on the horizontal plane. A focused view of test point 2 is shown on the right. A valid data point requires that the reference trajectory passes through the tolerance area. Other tolerances related to the heading or velocity of the ELT may be considered. The data point is selected for the minimum difference
between evaluation pose and reference data at the time
. The associated data point from the SUT is selected by the corresponding timestamp, resulting in the
Evaluation Data.
Performance metrics are then calculated (2). The
Performance Evaluation aims to provide a holistic overview of the system behavior. Therefore, several metrics are calculated based on the error vectors. The 3D error vector
and the absolute 3D error vector
are determined by
and
whereby
denote a location estimate from the SUT and
denote the corresponding data point from the reference system, with
, and
n equals the amount of evaluation poses. The horizontal, vertical, and spherical position error vectors are determined by computing the Euclidean error of the respective components.
The heading error
and the absolute heading error
of the heading estimate
and the reference heading
are determined by
and
whereby
elaborates the remainder of
a and
b.
The following performance metrics are calculated from the vectors of the position error, the absolute position error, the horizontal, vertical, and spherical position error, and the heading error:
Mean;
Standard deviation;
Median;
RMSE;
Variances of magnitudes;
95th percentile and percentiles related to
-levels, as presented in
Section 3.4.
In practice, many things can go wrong during test and evaluation. Problems with data recording, clock synchronization, calibration, alignment determination, or data processing are common. To ensure the validity of the T&E results, the Experiment Data and the Performance Results must be carefully checked (3). Visualizations are recommended to gain an understanding of the system behavior. The repeatability or reproducibility of an experiment can be determined by comparing the Performance Results from various experiments. In addition, the impact of application-driven influences on the system performance can be examined.
3.9. System Evaluation (g)
Potortì et al. [
5] criticize metrics defined in the ISO/IEC 18305 for being difficult for the system user to interpret and call for the exclusive use of the 95th percentile. Since applications of localization vary widely, it is not satisfactory for the system user to focus on only one metric. For instance, for customer tracking in a supermarket, it may be sufficient to consider the 3
-percentile with low position reliability requirements, while for a safety-critical application, such as an autonomous forklift, the percentile corresponding to the
-level might be considered. To resolve this conflict, the
T&E 4iLoc Framework provides a
System Evaluation that focuses on the system user and is separate from the
Performance Evaluation to support comprehensibility for system users without losing relevant information for developers and testers.
The
System Evaluation is based on the
Requirements defined in the
Requirement Specification and on the
Performance Results with the aim of determining the suitability of a localization system for an AUC. The
Requirements consist of the description of absolute accuracy and confidence. The module’s functions are shown in
Figure 9b. To determine the suitability of a system, the performance metrics corresponding to the requirements are first selected (1). The specified confidence level corresponds to the type of percentile to be considered. Then, the requirements and the performance metrics are compared (2). Finally, a system is considered suitable, if all “must” requirements of an application are met (3). If “shall” requirements are not met, the system is still recommended, but limitations are pointed out.
Finally,
Figure 11 provides an overview of the
T&E 4iLoc Framework, including the presented functions for each module. The framework enables the profound determination of a system’s suitability for an application, based on application-driven test and evaluation in a semi-controlled environment. It is open to generic localization systems and focuses on the stakeholder requirements for T&E by providing different function modules. The flexible definition of application-dependent scenarios addresses transferability, while the provision of a reference scenario aims at repeatability and reproducibility.
4. Empirical Validation
Meaningful test and evaluation implies that localization systems of various technologies can be analyzed and compared for their performance and suitability for an application. In the following, the T&E 4iLoc Framework is used for test and evaluation to examine the framework’s validity, by considering a logistics application.
In logistics processes, everything revolves around the movement of goods and assets. They can only be moved effectively and efficiently if their position is known. Consequently, ILS are an essential tool for improving the understanding and control of processes related to material flow. On the one hand, a logistics application is considered for the empirical validation of the
T&E 4iLoc Framework, as indoor localization systems are attributed an enormous potential for optimizing material flows. For example, Lee et al. [
49] present an application for the tracking of assets, Reinke and Beinschob [
50] for enabling automated guided vehicles (AGV) and Macoir et al. [
51] for automated inventory management in warehouses. On the other hand, warehouse environments are suitable to be modeled in semi-controlled test environments. In warehouses, the aim is to achieve a high ratio of usable space to floor area. The need for walls, e.g., for fire protection measures, leads to the division of a warehouse into large compartments. Special features in these compartments result from the provision of logistics systems. Test halls resemble warehouse compartments in their basic structure, and the features of a warehouse relevant for localization systems can be modeled on a smaller scale.
In the following, a UWB-based, a camera-based, and a LiDAR-based ILS are exemplary examined for the application of AGVs in warehouse operation, as they represent commonly considered technologies for determining the absolute position of AGVs [
52]. The AUC is analyzed and modeled using the
T&E 4iLoc Modeling Procedure. The performance and suitability of the systems are then determined based on empirical data from the
T&E 4iLoc Benchmarking Procedure. The
Experiment Data and the software script used for the performance evaluation are publicly available [
53]. The
Jupyter Notebook file can be used for data comprehension. The test and evaluation procedure is described by explaining the execution of the framework’s function modules.
4.1. Application Definition
The goal of the AUC “automated guided vehicle in warehouse operation” is to increase efficiency and safety by flexibly automatizing the material flow in warehouses. Navigation is one of the most essential components of a robot. It serves to find an efficient and collision-free path. The task of navigation is commonly divided into global and local navigation. Global navigation aims at finding the approximate path to reach a certain goal, while local navigation focuses on robotics control [
54]. For local navigation, the robot must be aware of its surroundings, which is usually achieved by employing distance sensors. For efficient global navigation, the robot must know its absolute position and heading in the operating environment. In the following, “global navigation” is considered as a process for application-dependent test and evaluation. Nonetheless, many more processes can be defined to enable the efficient use of an AGV in warehouse operations, such as automatic picking and placement of goods or collision avoidance. As for the environment, a general warehouse is considered, characterized by shelving and conveyor systems, floor storage areas, and areas for parking industrial trucks.
4.2. Requirement Specification
Identifying the aisle in which the robot is located is considered the critical localization function for the process of “global navigation”. As an AGV is a floor-bound vehicle, the absolute position must be known in the horizontal plane. To quantify this parameter, the dimensions of the robot in an aisle are considered, as shown in
Figure 12. The aisle width is 1.50 m, the robot’s width is 0.6 m, and the shelf depth is 0.5 m. To avoid collisions, there is an additional tolerance distance between the AGV and shelves of 0.2 m, resulting in a guidance width of 1.1 m. Even if the robot travels close to the sides of the aisle, the position of the center of the robot must be determined so that it is within the correct aisle. Requirements for the horizontal position accuracy are calculated as the sum of the shelf depth, the tolerance width, and half of the robot’s width, resulting in a horizontal position accuracy requirement of 0.75 m.
In addition, the robot’s heading information can be used to improve global navigation. Hence, the heading is considered a “shall” requirement. For the process of global navigation, the robot’s heading is mainly relevant to identify the side of the aisle it is facing. The robot is assumed to be directed in one of the two directions of the aisle with a tolerance of ±30°. Consequently, the heading requirement for identifying the correct side is ±60°. Unlike for local path planning, safety is less of a concern for global path planning. Therefore, a moderate confidence level of 4
, i.e., 99.38% is chosen. The requirements for the process “global navigation” are summarized in
Table 4.
4.3. Scenario Definition
To enable the specification of a meaningful experiment, it is necessary to derive an application-dependent scenario. First, the considered localization systems, i.e., the UWB ILS, LiDAR-based ILS, and camera-based ILS, and their application-dependent influencing factors need to be considered. The location of the multi-layer LiDAR system and the 3D camera system is determined by map matching, i.e., by comparing the sensor data with a previously recorded map of the environment [
4,
55]. Consequently, the systems’ performance is influenced by the objects in the environment. RF-based localization systems, such as UWB systems, are generally prone to errors in so-called non-line-of-sight (NLOS) conditions. The positioning of the localization system under consideration is based on time-difference-of-arrival measurements [
4]. NLOS occurs when the direct line between the transmitting and receiving nodes of a signal is blocked. The material and structure of the occluding objects are important because they influence the signal transmission and reflection [
56]. Hence, objects in the environment are considered as a significant influencing factor for defining an application-dependent scenario. To resemble a warehouse environment, shelves with goods of different materials, vehicles, and other logistics equipment are considered. Common warehouse dynamics are mirrored by altering the layout after map recording. Another environmental influence on the performance of the camera-based ILS is the lighting. A mixture of daylight and artificial light is chosen as another application-dependent influence to reflect a typical warehouse environment.
For process influences, the ELT type, the motion, and the path are considered. To reflect the motion of an AGV, the ELT type “robot” is selected. Especially in mixed traffic environments, such as a typical warehouse, robots move at slow velocity. Considering the path, an AGV moves freely on the horizontal plane of a warehouse. For the test scenario, it is required for the robot to move through an aisle.
Table 5 summarizes the application-dependent scenario for the AUC.
4.4. Experiment Specification
The testbed at the Institute for Technical Logistics at Hamburg University of Technology is considered a semi-controlled test environment. By providing a rectangular test area of 63 m
, the framework requirements regarding the size of the test area are met. The environment can be equipped with various objects, such as shelves, pallets, industrial trucks, and other logistics equipment. The testbed features an optical passive motion capture system that enables the determination of 6-DoF reference pose data, with an absolute position accuracy of around 1 mm. Sensors and reflectors are mounted on a TurtleBot2 robotic platform. (
Figure 13a). The robot is automatically controlled based on the localization data from the reference system.
The UWB ILS (LOCU [
57], SICK AG) consists of four anchors, i.e., fixed nodes, and a localization tag. The anchors are uniformly distributed, avoiding symmetries. The “2D-Mode” is enabled to improve the system’s horizontal position accuracy by limiting the DoF. The LiDAR system consists of a multi-layer safety LiDAR scanner (microScan3 [
58], SICK AG) for emission and detection of laser pulses, a control unit (SIM1000 [
59], SICK AG), and localization software (LiDAR-LOC [
60], SICK AG). The pose of the sensor is determined by comparing scan points with a prerecorded map applying a particle filter [
61]. The field of view of the laser scanner is 270° and the localization is supported by an internal inertial measurement unit (IMU). Finally, the localization of the Intel RealSense T265 Tracking Camera [
62] is achieved based on a feature-based visual simultaneous localization and mapping (vSLAM) algorithm [
63]. The stereo camera is likewise equipped with an IMU and allows identification of loop closures. All systems are deployed according to the installation instructions.
Figure 13b gives a schematic overview of the
Experiment Spec. The test area is surrounded by typical warehouse objects, such as a pallet shelf, industrial trucks, and a conveyor belt. Two rows of shelving racks are placed inside the test area to build an aisle. A total of 73 evaluation poses are sampled on a grid with 1 m grid length, to guide the robot multiple times through the aisle and around the shelves. The resulting path is depicted in
Figure 13b.
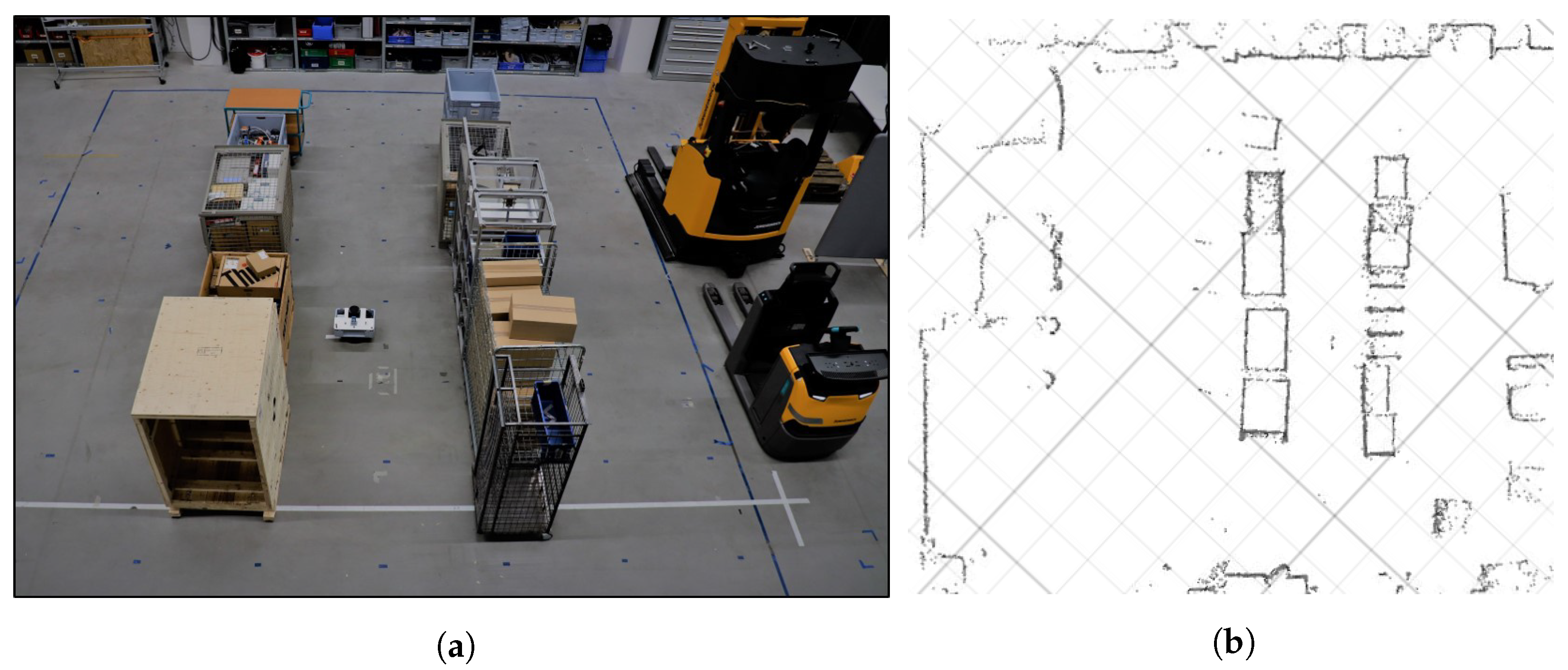
4.5. Experiment Execution
The environment and the SUT are set up according to the
Experiment Spec. A photo of the environment at the Institute for Technical Logistics is shown in
Figure 14a. The shelves on the test area are imitated by objects of different materials, resulting in NLOS conditions for the UWB ILS. The reference system is calibrated and synchronized to the localization systems via precision time protocol (PTP) [
64] with an offset of less than 0.5 ms. The reference system is set up to accurately locate the origins of the devices on the robot. The Umeyama alignments for the SUTs are then determined based on the measurements from the localization and reference data at nine uniformly distributed positions on the test area. Maps of the environment are recorded for the LiDAR and camera-based ILS. The recorded contour map from the LiDAR ILS is shown in
Figure 14b. Then, the sequence of four of the static objects is altered to replicate realistic layout changes in a real warehouse environment.
Finally, the experiment is executed. The localization data are recorded simultaneously from the three SUT and the reference system. The Robot operating System (ROS) [
65] is used to control the robot and record the data.
4.6. Performance Evaluation
The
Evaluation Data are computed according to the methods presented in
Section 3.8. The
Performance Results are presented below. The goal is not to provide an exhaustive analysis, but to demonstrate approaches and the need for studying the behavior of the systems. Due to their relevance to the AUC, the focus of the evaluation is on the horizontal components. The performance metrics related to the horizontal error components (
x,
y,
) are presented in
Table 6.
In the following, selected metrics are discussed for the LiDAR-based system. The low mean value and RMSE of the error vector and , compared to the respective absolute error vectors, indicate good coordinate alignment and rather low location-dependent inaccuracies. The absolute value of the mean heading error is rather high compared to the corresponding standard deviation. A possible reason for this systematic error may be a misalignment of the coordinate axes between the LiDAR sensor and the motion capture reflectors. To compensate for this, the mean of could simply be removed as a bias. However, this would also lead to the neglection of location-dependent errors. For a system user, the high percentiles (e.g., the 95th percentile or high sigma levels) of the horizontal position error and the absolute heading error are of particular importance.
In addition, several graphs are shown in
Figure 15. The trajectories from
Figure 15a are based on the aligned position data of the localization systems, while the other graphs are based on the discrete evaluation data. The trajectory of the camera-based ILS shows significant deviations from the evaluation poses. This is reflected as a leap in the horizontal error graph (
Figure 15b). The heading error is not particularly affected by the leaps of the position error. A possible reason for the behavior could be the relocalization of the system in the previously recorded map due to altering the environment after map recording. The position data of the UWB ILS is characterized by a deviation to the center of the test area (
Figure 15a) and comparatively high dispersion (
Figure 15d). However, there are no major outliers. With the exception of one outlier in the heading estimate, the LiDAR ILS shows reliably good system behavior in terms of horizontal and heading error.
4.7. System Evaluation
Finally, the derived performance requirements are matched with the calculated metrics to determine the suitability of a localization system for the process “global navigation”. As previously discussed, the relevant performance requirements are the
-percentiles of the horizontal position error
(“must”) and the absolute heading error
(“shall”).
Table 7 provides a comparison between the requirements and metrics, where the red font color indicates that a requirement is not met. The “must” requirement is met by both the UWB and the LiDAR-based ILS. Hence, both systems are considered suitable for “global navigation”. Since the UWB ILS does not provide heading information, the horizontal position and absolute heading error requirements are only met by the LiDAR system. However, both systems are generally considered suitable for the AUC to enable “global navigation”. For the camera-based ILS, the requirement regarding the horizontal position error is not met.
The
T&E 4iLoc Framework was designed with the aim to increase meaningfulness of T&E in semi-controlled environments. Requirements were specified and test scenarios designed for the application “AGVs in warehouse operation”. Application-dependent test and evaluation were performed, resulting in several performance metrics for comparison between systems and the determination of the systems’ suitability. Based on the empirical validation, two aspects are highlighted to demonstrate the relevance of the presented methodology. First, the relevance of application-driven test and evaluation is shown by comparison to results from the literature. In an experiment presented by Hausamann et al. [
66], analysis of the absolute position accuracy of the RealSense T265 Tracking Camera based on continuous position data yielded a mean horizontal error of around 0.4 m. This is in contrast to a mean error of 0.8 m for application-dependent testing in this work. The data presented by Hausamann et al. [
66] were gathered by tracking a person on a significantly smaller test area, without the consideration of aisles or alterations of the environment after map recording. Hence, it may be misleading to consider the test and evaluation results for the application “AGVs in warehouse operation”. The second aspect consists of the need to thoroughly examine the experiment data before drawing final conclusions. Performance metrics are absolutely necessary to compare systems and determine their suitability for an application; however, important characteristics of a system remain hidden if only one metric is looked at. By providing multiple metrics and graphical data representations, possible reasons for localization errors can be identified. Some of these may be relevant for the application, while others should be disregarded.
5. Discussion and Conclusions
High heterogeneity of indoor localization technologies, applications, and influences pose multiple challenges for test and evaluation of ILS. By comparing test and evaluation of ILS in practice, the need for methodological approaches becomes evident. Methodologies exist, but they do not fully satisfy stakeholders’ requirements for feasibility, reproducibility, comparability, transferability, and comprehensibility. In this work, the T&E 4iLoc Framework was introduced—a methodology for system-level, black-box test and evaluation in semi-controlled environments. Similar to the existing methodologies, the T&E 4iLoc Framework is based on a system-level and black-box approach. The main benefits and disadvantages arise from the focus on semi-controlled test environments. By using the T&E 4iLoc Framework, the drawbacks of low feasibility, comparability, and reproducibility in building-wide testing can be overcome. On the other hand, building-wide tests have the advantage that the results are highly transferable to real-world applications. To produce results not only meaningful for system developers but also system users, the T&E 4iLoc Framework is designed to be application-driven. Hence, consideration of an application or application domain affects both the test and the evaluation of localization systems. However, due to the spatial scaling or the abstraction of environment and application, there are limiting effects with regard to transferability, which require further investigation. Comprehensibility is addressed by providing a modular and process-oriented procedure. The use of the methodology for empirical validation has demonstrated its feasibility. Comparability between systems has been demonstrated for benchmarking the same scenario in the same testbed. Additional experiments are planned to further examine the reproducibility, comparability, and transferability of the test and evaluation results.
Different limitations exist. (1) To achieve meaningful results for T&E in semi-controlled test environments, the AUC and the SUT must be suitable. For example, meaningful test and evaluation of workers in an underground mine based on ultrasonic ILS, as presented by [
67], can hardly be achieved. (2) The spatial extent can significantly affect the absolute accuracy of an ILS. Further examination is required, to derive conclusion and potentially metrics for spatial scaling effects. (3) So far, only accuracy metrics that are based on the absolute localization error at discrete evaluation poses are considered. Although other metrics are currently not integrated in the
T&E 4iLoc Framework, the determination of additional accuracy metrics, such as the repeatability when approaching the same pose several times, is possible. Other metrics, such as Fréchet distance [
68] or relative position error [
23], can be determined based on the continuous evaluation data. In addition, metrics such as the position error from the direction of the ELT or the velocity-dependent heading error can be determined to analyze system behavior and to test validity. (4) For a holistic evaluation, the consideration of many more factors, such as the sensor weight, maintenance costs, or the system’s integrity, are essential. An overview on possible user requirements is given by Mautz [
4].
A web-based application to support systematic test and evaluation using the T&E 4iLoc Framework is currently under development and will be released in the near future. Besides the usage of the T&E 4iLoc Framework in empirical test and evaluation, it is conceivable to adapt the methodology for approaches such as “simulated data”, “common datasets”, or “indoor localization competitions”. Adoption or adaption of the T&E 4iLoc Framework in industry and research are encouraged to increase meaningfulness of test and evaluation results. This is essential to support the application-driven research and development of ILS and increase market transparency, thus, advancing the practical application of ILS.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}