Axial Stress Measurement of Steel Tubes Using Ultrasonic Guided Waves


Abstract
:1. Introduction
2. Theory
2.1. Acoustoelastic Theory under Axial Stress
2.2. Guided Waves in Tube
3. Experiments
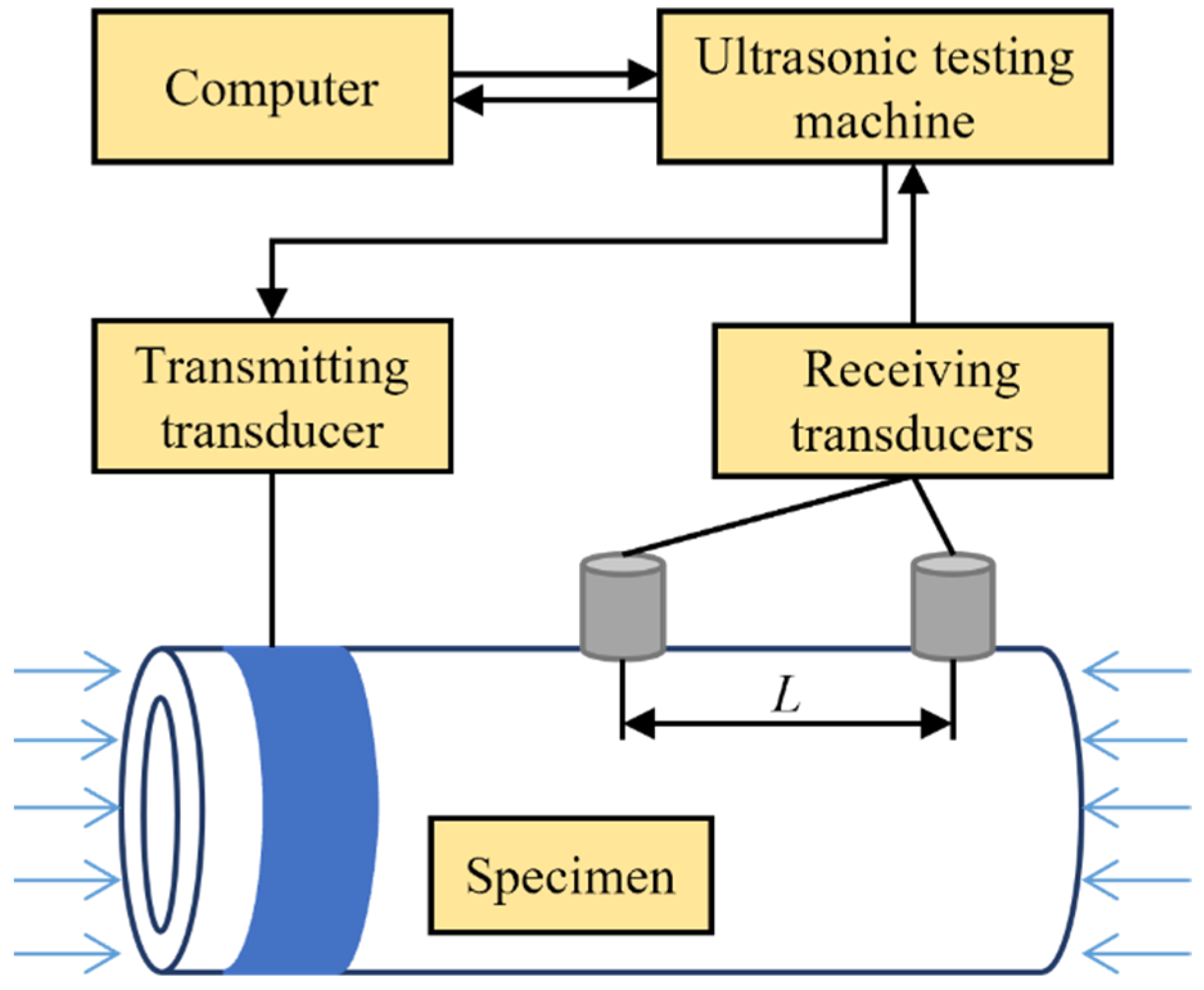
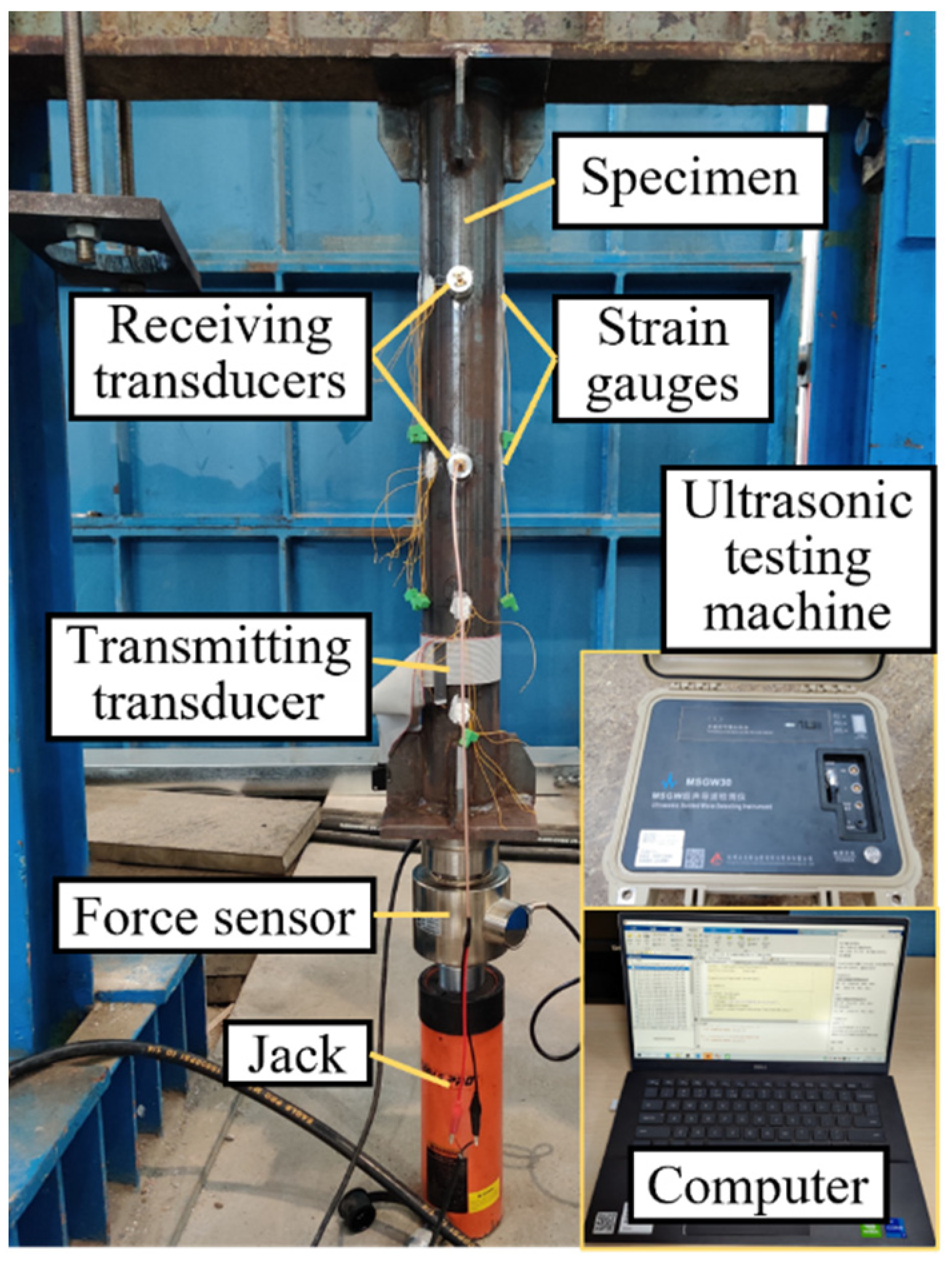
3.1. Equipment Setup
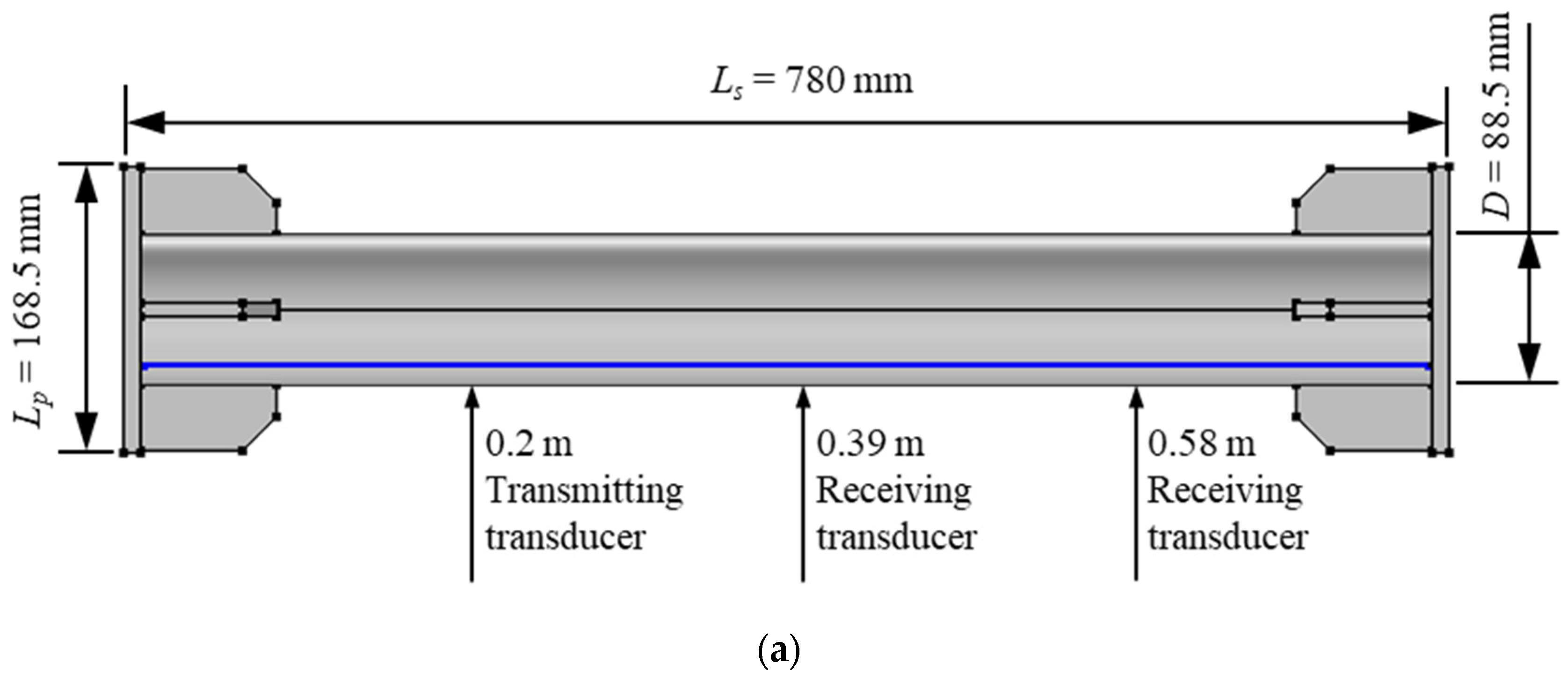
3.2. Specimen and Loading Method
3.3. Signal Choosing and Processing
4. Results
5. Conclusions
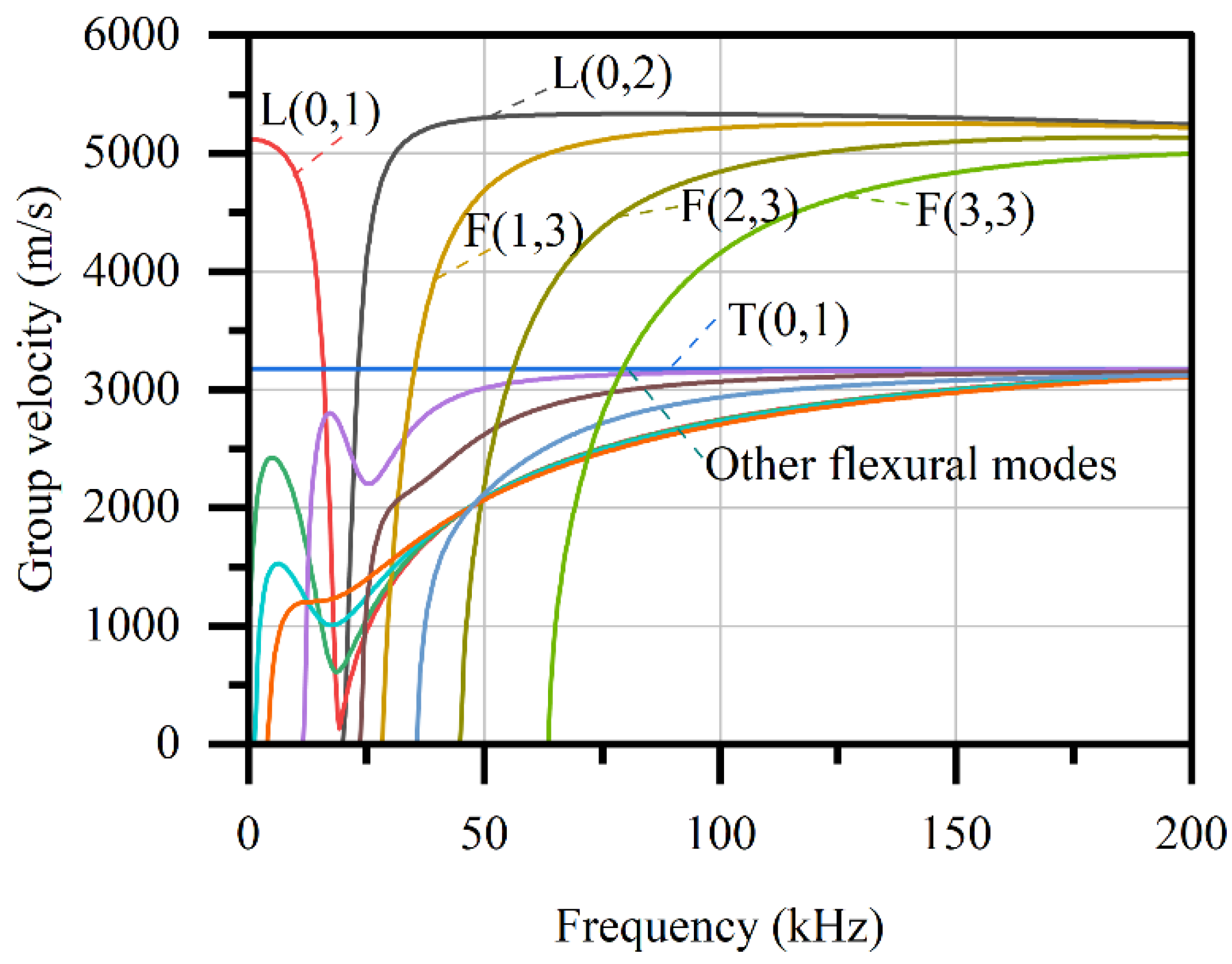
- For tube members, the T(0,1) mode is another good choice for wave velocity measurements. Based on the numerically obtained dispersion curves, the T(0,1) mode is appropriate to be excited due to no dispersion, low propagation velocity, and consistency for different sectional sizes.
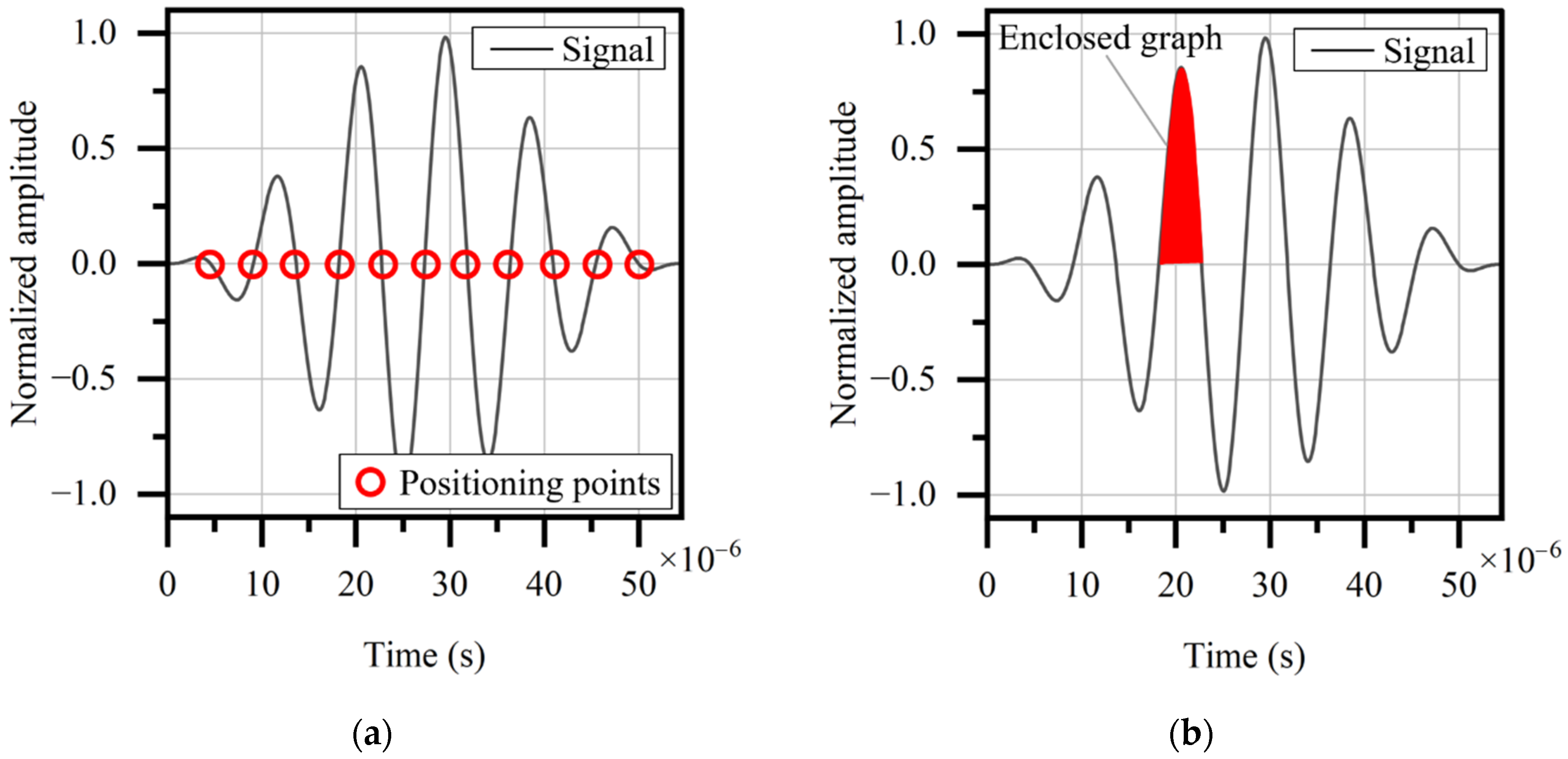
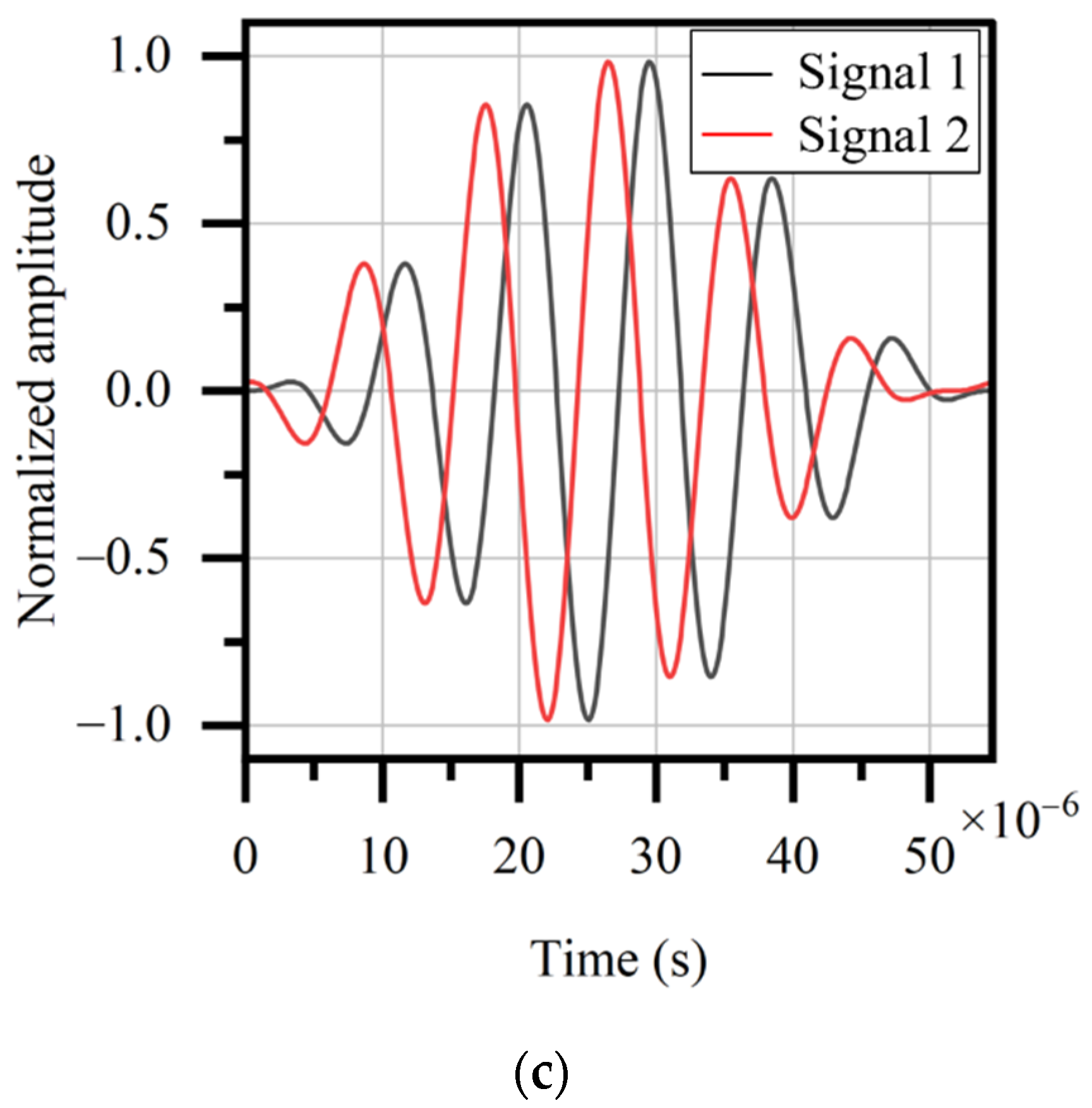
- The three signal positioning methods, i.e., zero-point method, graph centroid method, and cross-correlation method, showed a similar error level around 1.8%, compared to the theoretical result. They are all proved in FE simulations to be usable to determine the signal position in the time domain.
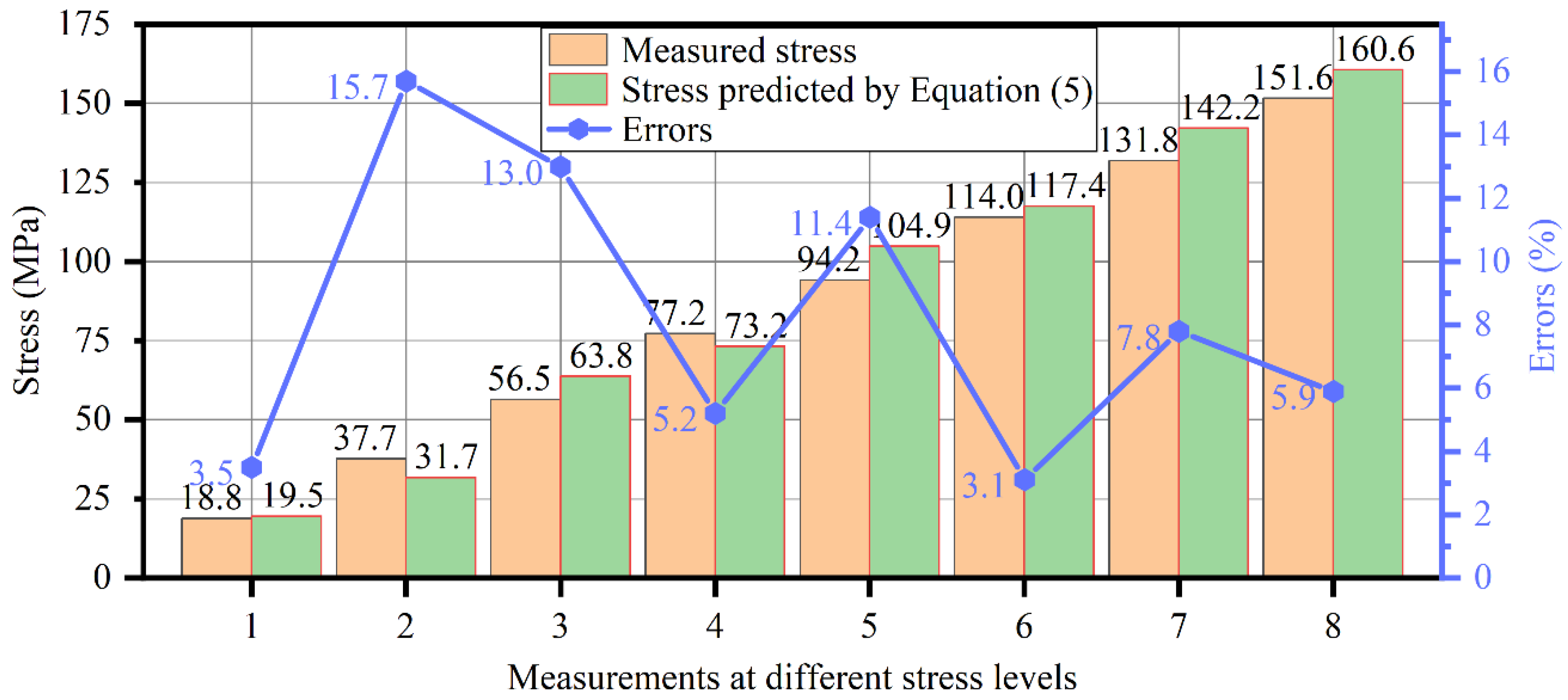
- There is a linear relationship between the axial stress in steel tubes and the group velocity of guided waves in steel tubes. The detailed equation of the linear relationship can be calibrated by experiments. A linear fitting with an R-square coefficient of 0.9679 is observed, and thus the linear relationship between the stress and group velocity is validated.
- The average error of the stresses predicted by the fitted linear equation is 8.2%, and the maximum error of them is 15.7%. The level of errors is comparable to previous studies on steel rods and strands.
Author Contributions
Funding
Institutional Review Board Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, Y.; Liu, Y.; Li, Y.; Hao, Q. Development and Application of Resistance Strain Force Sensors. Sensors 2020, 20, 5826. [Google Scholar] [CrossRef] [PubMed]
- Merzbacher, C.I.; Kersey, A.D.; Friebele, E.J. Fiber Optic Sensors in Concrete Structures: A Review. Smart Mater. Struct. 1996, 5, 196–208. [Google Scholar] [CrossRef]
- Tao, W.; Wenqian, Z. A Study on Dynamic Measurement Methods Based on Vibrating Wire Sensors. Meas. Sci. Technol. 2019, 30, 25105. [Google Scholar] [CrossRef]
- Rossini, N.S.; Dassisti, M.; Benyounis, K.Y.; Olabi, A.G. Methods of Measuring Residual Stresses in Components. Mater. Des. 2012, 35, 572–588. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.L.; Lloyd, G.M.; Hovorka, O. Development of a Remote Coil Magnetoelastic Stress Sensor for Steel Cables. In Proceedings of the Health Monitoring and Management of Civil Infrastructure Systems, SPIE, Newport Beach, CA, USA, 6–8 March 2001; Volume 4337, pp. 122–128. [Google Scholar]
- He, J.; Li, Z.; Teng, J.; Li, M.; Wang, Y. Absolute Stress Field Measurement in Structural Steel Members Using the Lcr Wave Method. Measurement 2018, 122, 679–687. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, J.; Lian, Y.; Du, C.; Xu, W.; Zhao, Y.; Mo, J. Research Progress of Residual Stress Determination in Magnesium Alloys. J. Magnes. Alloy. 2018, 6, 238–244. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; Liu, H.; Zhou, J.; Yin, C.; Liao, L. Resonance Enhanced Magnetoelastic Method with High Sensitivity for Steel Stress Measurement. Measurement 2021, 186, 110139. [Google Scholar] [CrossRef]
- Murnaghan, F.D. Finite Deformations of an Elastic Solid. Am. J. Math. 1937, 59, 235–260. [Google Scholar] [CrossRef]
- Hughes, D.S.; Kelly, J.L. Second-Order Elastic Deformation of Solids. Phys. Rev. 1953, 92, 1145–1149. [Google Scholar] [CrossRef]
- Leon-Salamanca, T.; Bray, D.F. Residual Stress Measurement in Steel Plates and Welds Using Critically Refracted Longitudinal (LCR) Waves. Res. Nondestruct. Eval. 1996, 7, 169–184. [Google Scholar] [CrossRef]
- Hirao, M.; Ogi, H.; Yasui, H. Contactless Measurement of Bolt Axial Stress Using a Shear-Wave Electromagnetic Acoustic Transducer. NDT&E Int. 2001, 34, 179–183. [Google Scholar] [CrossRef]
- Egle, D.M.; Bray, D.E. Measurement of Acoustoelastic and Third-Order Elastic Constants for Rail Steel. J. Acoust. Soc. Am. 1976, 60, 741–744. [Google Scholar] [CrossRef]
- Chaki, S.; Bourse, G. Stress Level Measurement in Prestressed Steel Strands Using Acoustoelastic Effect. Exp. Mech. 2008, 49, 673. [Google Scholar] [CrossRef]
- Gazis, D.C. Three-Dimensional Investigation of the Propagation of Waves in Hollow Circular Cylinders. I. Analytical Foundation. J. Acoust. Soc. Am. 1959, 31, 568–573. [Google Scholar] [CrossRef]
- Silk, M.G.; Bainton, K.F. The Propagation in Metal Tubing of Ultrasonic Wave Modes Equivalent to Lamb Waves. Ultrasonics 1979, 17, 11–19. [Google Scholar] [CrossRef]
- Alleyne, D.N.; Cawley, P. The Excitation of Lamb Waves in Pipes Using Dry-Coupled Piezoelectric Transducers. J. Nondestruct. Eval. 1996, 15, 11–20. [Google Scholar] [CrossRef]
- Alleyne, D.N.; Cawley, P. Long Range Propagation of Lamb Waves in Chemical Plant Pipework. Mater. Eval. 1997, 55, 504–508. [Google Scholar]
- Alleyne, D.N.; Pavlakovic, B.; Lowe, M.J.S.; Cawley, P. Rapid, Long Range Inspection of Chemical Plant Pipework Using Guided Waves. AIP Conf. Proc. 2001, 557, 180–187. [Google Scholar] [CrossRef]
- Ma, Y.; Yang, Z.; Zhang, J.; Liu, K.; Wu, Z.; Ma, S. Axial Stress Monitoring Strategy in Arbitrary Cross-Section Based on Acoustoelastic Guided Waves Using PZT Sensors. AIP Adv. 2019, 9, 125304. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.L.R.; He, Y.D.; GangaRao, H.V. Measurement of Prestress Force in the rods of Stressed Timber Bridges Using Stress Waves. Mater. Eval. 1998, 56, 977–981. [Google Scholar]
- Lanza di Scalea, F.; Rizzo, P.; Seible, F. Stress Measurement and Defect Detection in Steel Strands by Guided Stress Waves. J. Mater. Civ. Eng. 2003, 15, 219–227. [Google Scholar] [CrossRef]
- Chen, H.-L.; Wissawapaisal, K. Measurement of Tensile Forces in a Seven-Wire Prestressing Strand Using Stress Waves. J. Eng. Mech. 2001, 127, 599–606. [Google Scholar] [CrossRef]
- Washer, G.A.; Green, R.E. Ultrasonic Stress Measurements in Prestressing Tendons. AIP Conf. Proc. 2002, 615, 1288–1294. [Google Scholar] [CrossRef]
- Gandhi, N.; Michaels, J.E.; Lee, S.J. Acoustoelastic Lamb Wave Propagation in Biaxially Stressed Plates. J. Acoust. Soc. Am. 2012, 132, 1284–1293. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Wu, B.; Qin, F.; He, C.; Han, Q. Observation of Ultrasonic Guided Wave Propagation Behaviours in Pre-Stressed Multi-Wire Structures. Ultrasonics 2017, 73, 196–205. [Google Scholar] [CrossRef]
- Loveday, P.W. Guided Wave Inspection and Monitoring of Railway Track. J. Nondestruct. Eval. 2012, 31, 303–309. [Google Scholar] [CrossRef]
- Dubuc, B.; Ebrahimkhanlou, A.; Salamone, S. Higher Order Longitudinal Guided Wave Modes in Axially Stressed Seven-Wire Strands. Ultrasonics 2018, 84, 382–391. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, F.; Wang, X.; Du, W. Analysis of Guided Waves Dispersion and Acoustoelastic Effect in Stressed Waveguides by Eigenfrequency Method and Experimental Study. Russ. J. Nondestruct. Test. 2019, 55, 817–826. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, K.; Zhou, K.; Liang, Y.; Zhang, J.; Zheng, Y.; Gao, D.; Ma, S.; Wu, Z. Investigation of Thermo-Acoustoelastic Guided Waves by Semi-Analytical Finite Element Method. Ultrasonics 2020, 106, 106141. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Zheng, J.; Liu, N.; Li, M.; Teng, J. Stress Measurement for Steel Slender Waveguides Based on the Nonlinear Relation between Guided Wave Group Velocity and Stress. Measurement 2021, 179, 109465. [Google Scholar] [CrossRef]
- Chen, P.; He, X.; Wang, X. Ultrasonic Measurement of Axial Stress Using High-Frequency Cylindrical Guided Wave. IEEE Sens. J. 2021, 21, 6691–6697. [Google Scholar] [CrossRef]
- Chaki, S.; Bourse, G. Guided Ultrasonic Waves for Non-Destructive Monitoring of the Stress Levels in Prestressed Steel Strands. Ultrasonics 2009, 49, 162–171. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Li, Y.; Liu, X.; Yao, K. Ultrasonic Measurement on Axial Force of High-Strength Bolt in Service. J. Low Freq. Noise Vib. Act. Control 2020, 39, 596–603. [Google Scholar] [CrossRef] [Green Version]
- Hayashi, T.; Song, W.-J.; Rose, J.L. Guided Wave Dispersion Curves for a Bar with an Arbitrary Cross-Section, a Rod and Rail Example. Ultrasonics 2003, 41, 175–183. [Google Scholar] [CrossRef]
- Marzani, A.; Viola, E.; Bartoli, I.; Lanza di Scalea, F.; Rizzo, P. A Semi-Analytical Finite Element Formulation for Modeling Stress Wave Propagation in Axisymmetric Damped Waveguides. J. Sound Vib. 2008, 318, 488–505. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Waves in Solid Media. J. Acoust. Soc. Am. 2000, 107, 1807–1808. [Google Scholar] [CrossRef]
- GB/T 1591; High Strength Low-Alloy Structural Steels. State Administration of Technical Supervision and Inspection: Beijing, China, 2008.
- COMSOL Multiphysics®; COMSOL AB: Stockholm, Sweden, 2021.
- Takahashi, S. Measurement of Third-Order Elastic Constants and Stress Dependent Coefficients for Steels. Mech. Adv. Mater. Mod. Process. 2018, 4, 2. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steps | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Stress (MPa) | 18.75 | 37.5 | 56.25 | 75 | 93.75 | 112.5 | 131.25 | 150 |
| Methods | Theoretical Result | Zero-Point | Graph Centroid | Cross-Correlation |
|---|---|---|---|---|
| TOFs (×10−7 s) | 7.701 | 7.839 | 7.842 | 7.840 |
| Errors | - | 1.79% | 1.83% | 1.80% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Xu, X.; Han, J.; Luo, Y. Axial Stress Measurement of Steel Tubes Using Ultrasonic Guided Waves. Sensors 2022, 22, 3111. https://doi.org/10.3390/s22093111
Zhu S, Xu X, Han J, Luo Y. Axial Stress Measurement of Steel Tubes Using Ultrasonic Guided Waves. Sensors. 2022; 22(9):3111. https://doi.org/10.3390/s22093111
Chicago/Turabian StyleZhu, Siyuan, Xian Xu, Jinsong Han, and Yaozhi Luo. 2022. "Axial Stress Measurement of Steel Tubes Using Ultrasonic Guided Waves" Sensors 22, no. 9: 3111. https://doi.org/10.3390/s22093111
APA StyleZhu, S., Xu, X., Han, J., & Luo, Y. (2022). Axial Stress Measurement of Steel Tubes Using Ultrasonic Guided Waves. Sensors, 22(9), 3111. https://doi.org/10.3390/s22093111